This section describes the methods to calculate the air-gap ETC in the laminar state and the equivalent treatment to the thermal circuit of the hub–shaft–bearing.
2.1. Accurate Calculation of the Air-Gap Equivalent Thermal Conductivity (ETC)
In the heat transfer research of the air-gap in the laminar state, Gazley measured the thermal conductivity of a cross-section in the air-gap height direction. Results show that heat transfers from one surface to another, and the intensity of the heat exchange is independent of the rotating speed [
16].
With increasing rotating speed, which is limited in the laminar state, the heat transfer performance of the air-gap improves constantly. The thermal conduction property of the air inside the air-gap is not enhanced but the HTC of the two cylinders is reinforced. The improvement of the HTC is caused by the fluid flow in the air-gap, which implies an improvement in the heat transfer of the two cylinders when calculating the air-gap ETC.
The definition of the Nusselt number describes
Nu as follows:
where α
1 is the average HTC of the two cylinders of the air-gap,
L1 is the characteristic surface length, and λ
1 is the thermal conductivity of the still coolant. In this case,
L1 is twice the length of the air-gap [
7], and λ
1 is the thermal conductivity of still air; both variables are constant. As the speed of the motor increases from 0 to the limiting value, which is the maximum speed rendering the air-gap in the laminar state, α
1 becomes larger and
Nu increases constantly. This relationship shows the increased effect of heat convection on the heat transfer of the air-gap.
The total thermal resistance between the stator and rotor comprises three thermal resistances in series.
Figure 1 shows the thermal circuit of the air-gap.
RS2 is the convection thermal resistance of the rotor-side cylinder.
RC is the conduction thermal resistance of the air-gap.
RS1 is the convection thermal resistance of the stator-side cylinder.
The average convection thermal resistance of the two cylinders
RS is provided and is defined as (
RS1 +
RS2)/2.
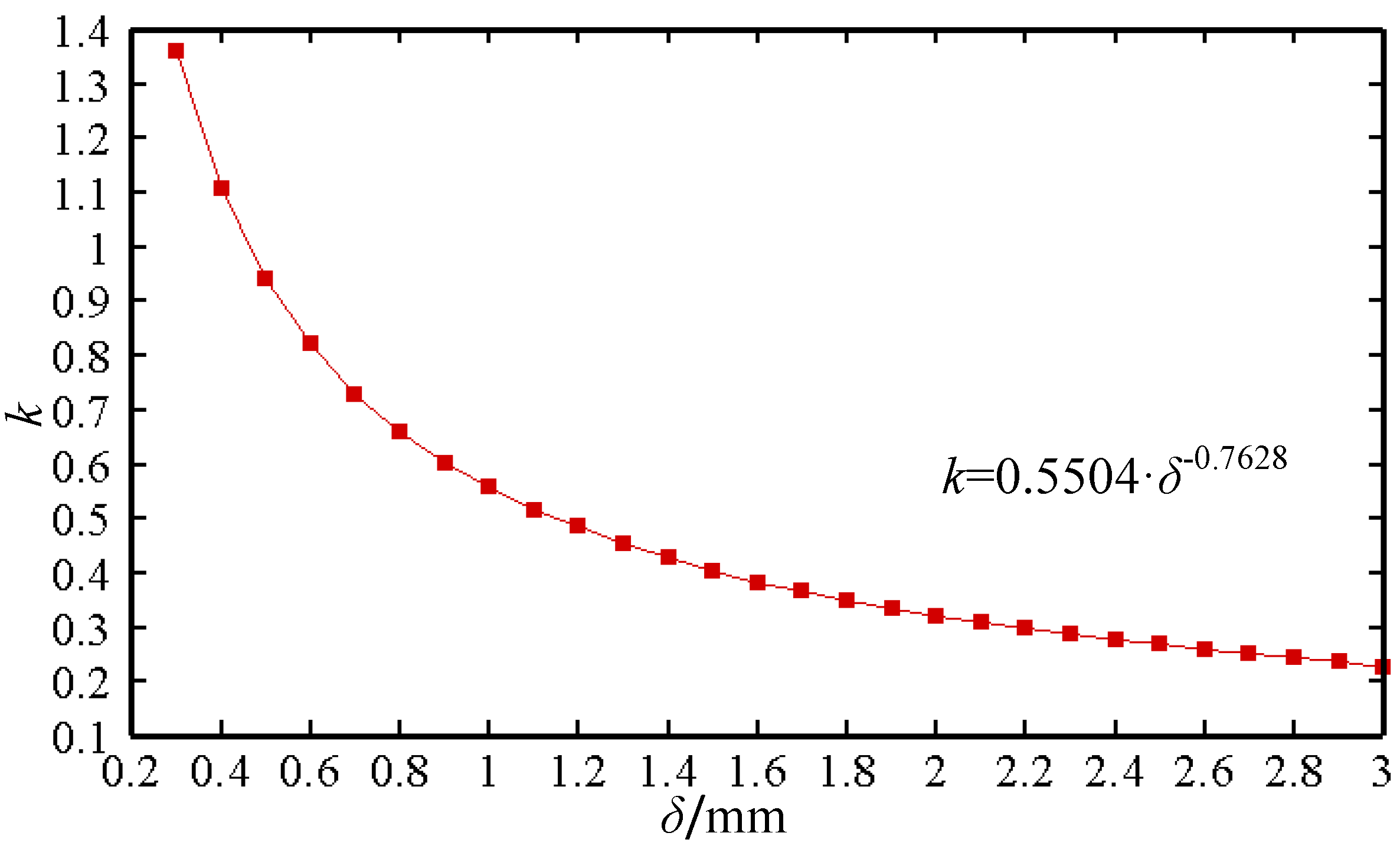
k is the critical point to determine the air-gap ETC in the laminar state. When
RS/
RC >
k, the thermal conductivity of the air-gap equals the thermal conductivity of still air. When
RS/
RC <
k, the thermal resistance of the two cylinders promotes the heat transfer performance of the air-gap, and the thermal conductivity of the air-gap is larger than that of still air.
k is only related to the length of air-gap δ.
Figure 2 shows the relationship curve of
k and δ.
The conduction thermal resistance of the air-gap
RC can be calculated using the following equation:
where
Sa is the mean area of the two cylinders.
The average convection thermal resistance of the two cylinders
RS can be calculated using the following equation:
where
α1 can be obtained using the following equation [
17]:
where
V is the velocity of the rotor-side cylinder.
The length of the air-gap is constant for a common motor, thereby making
k and
RC constant as well. With the speed of the motor constantly increasing from 0, α
1 increases gradually and
RS decreases constantly. When
RS is equal to the product of
k and
RC, the speed is the critical speed
n1 and the air-gap ETC is λ
1.
n1 can be calculated using the following equation:
where
r2 is the radius of the rotor-side cylinder.
The speed continues to increase from
n1. When the speed reaches the limiting speed
n2, which is the maximum speed rendering the air-gap in the laminar state, the air-gap ETC is λ
2.
n2 can be calculated using the following equation:
where ν is the kinematic viscosity of air.
Rec is the critical Reynolds number, which can be acquired using the following equation [
18]:
λ
2 can be obtained via the following equation [
13,
14]:
where
r1 is the radius of the stator-side cylinder; η is the ratio of
r1 and
r2 and its range is 0 < η < 1;
Re is the Reynolds number, which can be calculated using the following equation:
where
n is the speed of the motor. When the range of
n is [
n1,
n2], the corresponding range of the air-gap ETC, λ
eff, is [λ
1, λ
2], and λ
eff is mainly affected by
RS. With the constant decrease in
RS, λ
eff increases gradually. λ
eff ∝
(∝ means proportional) because of the relationship of
RS ∝ 1/α and α ∝
. When the air-gap is in the laminar state, λ
eff with a speed of
n, can be obtained using the following equation:
When the air-gap is in the turbulent state, the air-gap ETC can be calculated using Equation (8).
2.2. Equivalent Treatment of the Hub–Shaft–Bearing Thermal Circuit
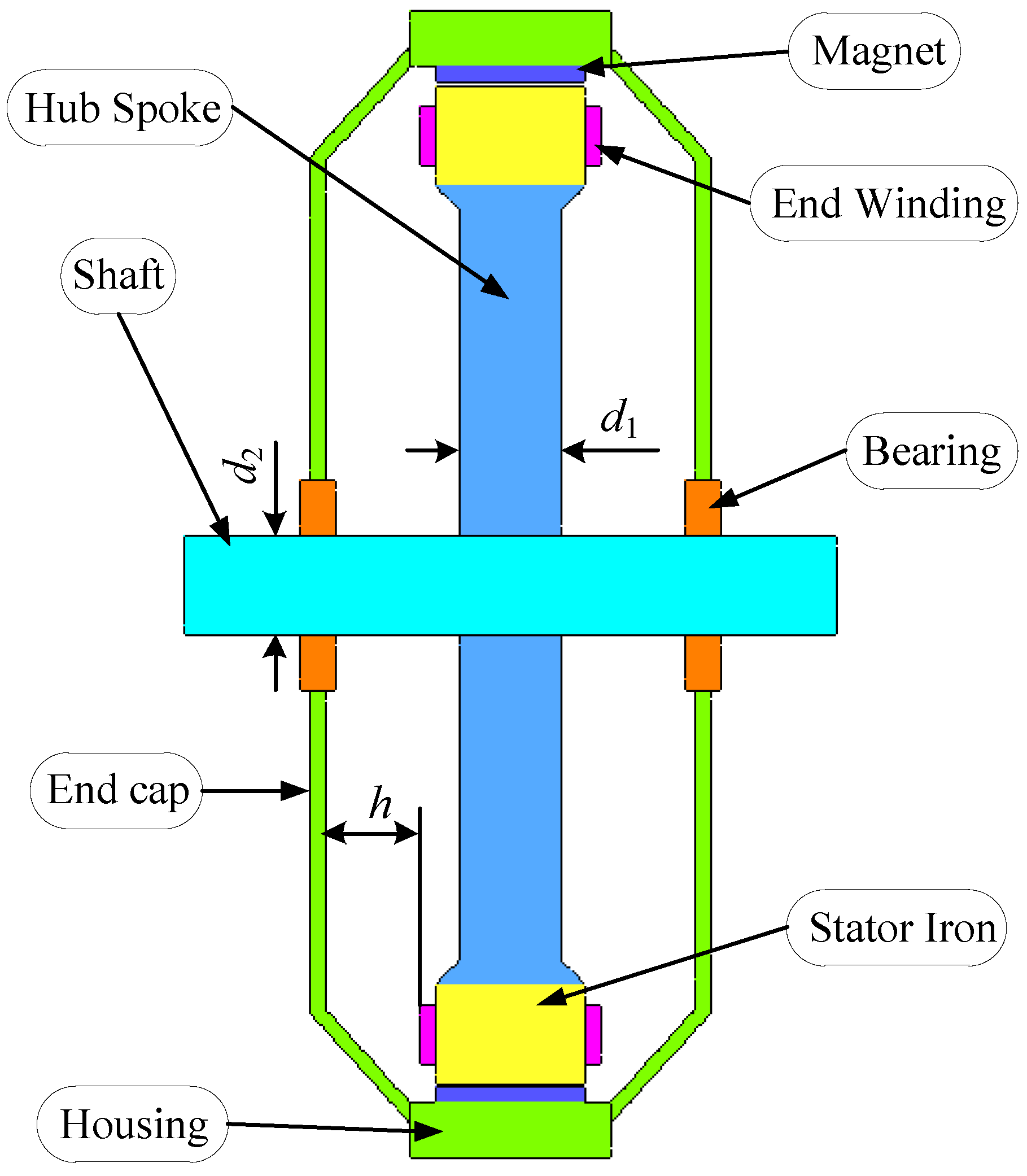
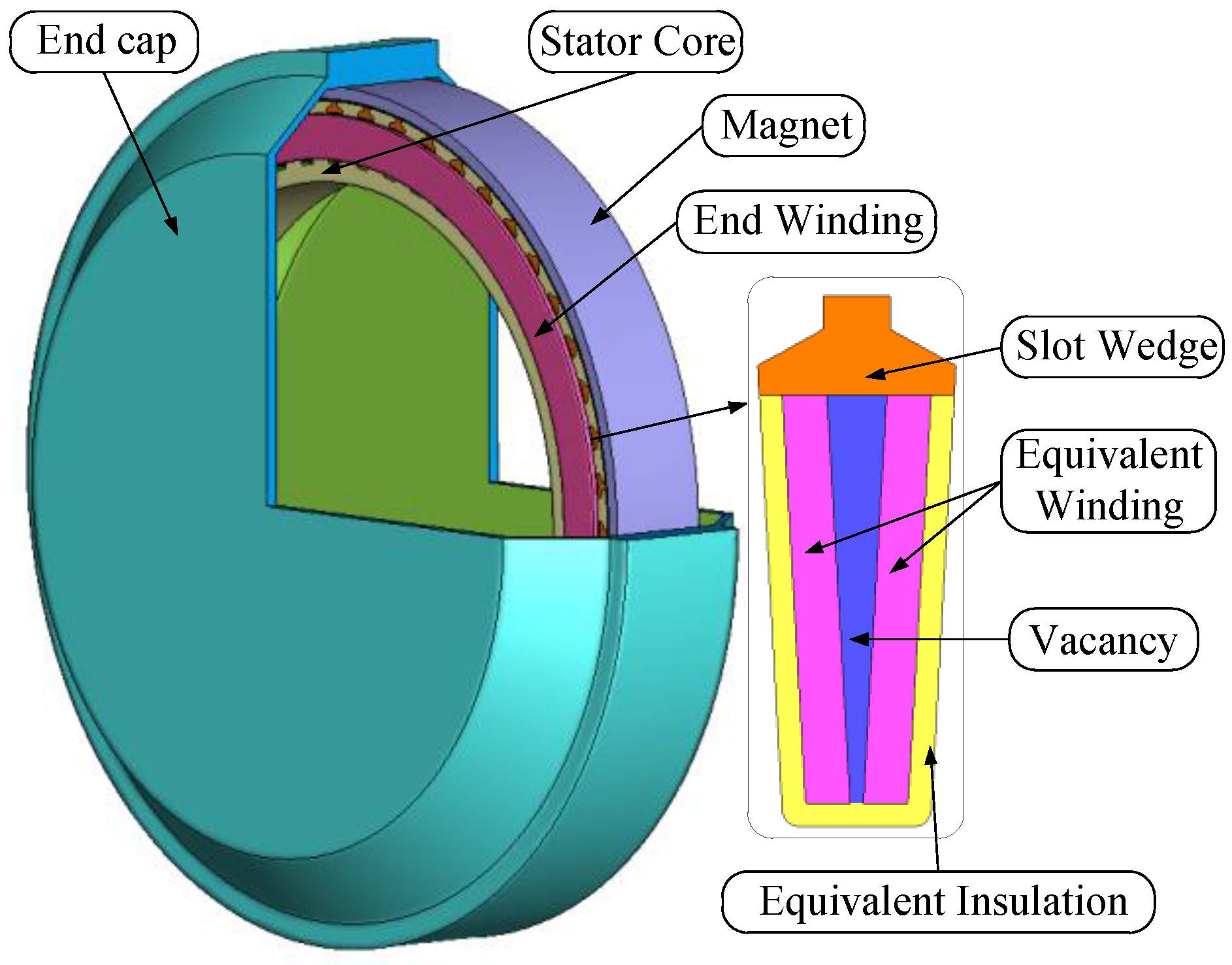
An outer-rotor air-cooling motor is used as an example to illustrate the method of equivalent treatment of the hub–shaft–bearing thermal circuit.
Figure 3 shows that the cylinder of the stator yoke connects with the end caps through the hub, shaft, and bearing. All these components are made of metals, thereby performing well in heat conduction. Thus, the effect of heat transfer on the thermal circuit should be considered. The calculation efficiency will decrease if the calculation model is built according to the actual structure. The heat transfer mode of the thermal circuit is equivalent to the heat convection from heat conduction on the premise of the same cooling performance. The HTC of the stator yoke cylinder is considered a boundary condition that is applied to the model. The equivalent treatment saves the establishment of the hub, shaft, and bearing in the model, thereby simplifying the physical model and embodying the heat transfer effect of the thermal circuit.
The thermal circuit of the hub includes six spokes that conduct heat in a parallel manner. The thermal circuit of the shaft comprises two cylinders that are half the length of the parallel heat shaft conductor. The aforementioned thermal resistances are calculated using Equation (2). The thermal conductivity of the hub and shaft is 40 W/(m∙°C) according to their material properties. The type of bearing used is a deep groove ball bearing and the model is 6004/61804-LS [
19]. The thermal resistance of the bearings is 0.526 °C/W, as obtained through the thermal circuit calculation according to the structure parameters of the bearing.
The heat transfer between two interconnected objects is often described by the junction thermal resistance. For air-cooling motors, the gap between the joint surfaces has an immense influence on the accuracy of temperature calculation. The equivalent thermal resistance of the joint surfaces can be modeled by the equivalent air-gap conduction.
Table 1 presents the equivalent air-gap length [
20].
The total resistance
RT can be obtained using the cascade relationship of all the aforementioned thermal resistances. The HTC of the stator yoke cylinder α
2 is obtained using the following equation:
where
Sb is the area of the stator yoke cylinder.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}