Abstract
Nowadays offshore wind energy is the renewable energy source with the highest growth. Offshore wind farms are composed of large and complex wind turbines, requiring a high level of reliability, availability, maintainability and safety (RAMS). Firms are employing robust remote condition monitoring systems in order to improve RAMS, considering the difficulty to access the wind farm. The main objective of this research work is to optimise the maintenance management of wind farms through the fault probability of each wind turbine. The probability has been calculated by Fault Tree Analysis (FTA) employing the Binary Decision Diagram (BDD) in order to reduce the computational cost. The fault tree presented in this paper has been designed and validated based on qualitative data from the literature and expert from important European collaborative research projects. The basic events of the fault tree have been prioritized employing the criticality method in order to use resources efficiently. Exogenous variables, e.g., weather conditions, have been also considered in this research work. The results provided by the dynamic probability of failure and the importance measures have been employed to develop a scheduled maintenance that contributes to improve the decision making and, consequently, to reduce the maintenance costs.
1. Introduction
The renewable energy industry is in continuous development to achieve the energy framework targets established by governments [1]. Nowadays, the most developed countries are focused on improving the technology for offshore wind energy. The main advantages of the offshore wind farms are [2]:
- -
- The wind power captured by wind turbines (WTs) is more than onshore.
- -
- The size of offshore wind farms can be larger than onshore.
- -
- The environmental impact for offshore is less than in onshore.
The main disadvantages are:
- -
- It is more complex to evaluate the wind characteristics.
- -
- Larger investment costs. The offshore installation cost is 1.44 million €/MW, where the onshore is 0.78 million €/MW [3].
- -
- Operation and maintenance (O & M) tasks are more complex and expensive than onshore. The offshore O & M costs tasks are from 18% to 23% of the total system costs, being 12% for onshore wind farms [4].
The objective of this paper is to develop a novel maintenance management approach in order to establish a proper strategy for the maintenance task by using a predictive maintenance method based on statistical studies. This approach provides information about the WTs with high fault probability, a ranking of components of WTs to repair or replace according to the state of the system over the time, and when those maintenance tasks must be carried out. An adequate maintenance planning to ensure the right operation of an offshore wind farm is required. For this purpose, different techniques and methods of condition monitoring (CM) are employed for detection and diagnosis of faults of WTs [5]. Most of the research papers consider the CM in WTs referred to blades [6], gearboxes [7], electrical or electronic components [8] and tower [9]. CM leads to improve RAMS and to increase the productivity of wind farms.
2. CM Applied to WT
The main components of WTs are illustrated in Figure 1. WTs are usually three-blade units [10]. Once the wind drives the blades, the energy is transmitted via the main shaft through the gearbox to the generator. At the top of the tower, assembled on a base or foundation, the housing or nacelle is mounted and the alignment with the direction of the wind is controlled by a yaw system. There is a pitch system in each blade. This mechanism controls the wind power and sometimes is employed as an aerodynamic brake. Finally, there is a meteorological unit that provides information about the wind (speed and direction) to the control system.

Figure 1.
Components of the wind turbine (WT) where: 1—pitch system; 2—hub; 3—main bearing; 4—low speed shaft; 5—gearbox; 6—high speed shaft; 7—brake system; 8—generator; 9—yaw system; 10—bedplate; 11—converter; 12—tower; 13—meteorological unit.
CM systems are composed of different types of sensors and signal processing equipment applied on the main components of WTs such as blades, gearboxes, generators, bearings and towers. The choice and location of the right type and number of sensors are a key factor. The acquisition of accurate data is critical to determine the occurrence of a fault and to address the solution to apply. Nowadays, different techniques are available for CM: vibration analysis [3,11], acoustic emission [3,12], ultrasonic testing techniques [13,14], oil analysis [15], thermography [3,13] and other methods [16].
The first step of the CM process is the choice of an adequate technique for data acquisition, including electronic signals with the measurement of the required conditions, e.g., sound, vibration, voltage, temperature, speed. Then, a correct signal processing method is applied, e.g., fast Fourier transform, wavelet transforms, hidden Markov models, statistical methods and trend analysis. Fault detection and diagnosis (FDD) involves both CM techniques and the signal processing methods.
The frequency of occurrence, i.e., the probability of failure, of an event is necessary to study in order to improve the application of CMS for WTs [17]. This paper employed the Fault Tree Analysis (FTA) technique to calculate the probability of failure of the WT. FTA is a graphical representation of logical relationships between events. A Binary Decision Diagram (BDD) has been used to provide an alternative to the traditional technique in order to reduce the computational cost. BDD is an approach that determines the probability of failure of a system by examining the probability of failure of the components. The BDD method does not analyses the FTA directly. The Boolean equation represents the main event to analyse, e.g., the wind turbine failure, and it is obtained by BDDs that come from the fault tree. The ordering algorithm for the construction of the BDD has a crucial effect on its size, and therefore the computational cost. The algorithms are heuristics, and this is the reason that in this paper has been considered several in order to compare the results, being: Top-down-left-right, Depth First Search, AND, Breath First Search, and Level.
Finally, in order to optimize the resources, e.g., human, material, economic resources, etc., proper and accurate prioritization of the basic events, based on importance measurement, has been done according to the criticality method [18]. The information provided by the aforementioned method leads to establish an optimal maintenance management for offshore wind farms, considering both endogenous and exogenous variables.
3. FTA and BDD
A Fault Tree (FT) is a graphical structure formed by the causes of a certain type of failure mode (Top Event) and the failure mode of the components (basic events) connected by logical operators such as AND/OR gates [19]. The probability vector p represents the failure probabilities of the basic events qi, i ∈ {1, …, n}, being n the total number of events [20,21].
Then, the system failure probability Qsys can be obtained via FTA according to q:
Complex systems analysis produce thousands of combinations of events (minimal cut sets) that would cause the failure of the system and are used in the calculation of Qsys [21]. The determination of these minimal cut sets can be a large and time-consuming process, even on modern high speed computers. When the FT has many minimal cut sets, the determination of the exact failure probability of the top event also requires a high calculation costs. For many complex FTs, this requirement may be beyond the capability of the available computers. Therefore, some approximation techniques have been introduced with a loss of accuracy.
The BDD method does not analyze the FT directly. The conversion of the FT to a BDD make possible to calculate the probability of the top event by determining the Boolean equation of the top event. The conversion process from FT to BDD presents several problems, e.g., the ordering scheme chosen for the construction of the BDD has a crucial effect on its resulting size. A wrong ordering scheme may result in large BDD that presents high computational costs [19]. In order to improve the resource deployment in an existing system, proper and accurate ranking of the basic events is necessary [23,24]. Some prioritizations of the basic events of the FT have been considered in this paper. For further details of FTA and ranking methods, consultation of references [18,25] is recommended. BDDs have been successfully used in the literature as an efficient way to simulate FTs. BDDs were introduced by Lee [26], and further popularized by Akers [27], Moret [25] and Bryant [22]. These decision diagrams are composed by a data structure that can represent a Boolean function [28].
A BDD is a directed acyclic graph representation (V, N), with vertex set V and index set N, of a Boolean function where equivalent Boolean sub-expressions are uniquely represented [29]. A directed acyclic graph is a directed graph, i.e., to each vertex v there is no possible directed path that starts and finishes in v. It is composed of some interconnected nodes with two vertices. Each vertex is possible to be a terminal or non-terminal vertex. Each single variable has two branches: 0-branch corresponds to the cases where the variable has not occur and it is graphically represented by a dashed line (Figure 2); on the other hand, 1-branch cases are those where the event is being carried out and corresponds to the occurrence of the variable, and it is represented by a solid line (Figure 2). It allows to obtain an analytical expression depending on the probability of failure of the basic events and the topology of the FT. Paths starting from the top event to a terminal 1 provide a state in which the top event will occur. These paths are named cut sets.

Figure 2.
Binary Decision Diagram (BDD).
ITE (If-Then-Else) conditional expression is employed in this research work as an approach for the BDD’s cornerstones, based on the approach presented in reference [30]. Figure 2 shows an example of an ite done in a BDD that is described as: “If event A occurs, Then f1, Else f2” [31]. The solid line always belongs to the ones and the dashed lines to the zeros, explained above.
The following expression is obtained from Figure 2, considering Shannon’s theorem:
The size of the BDD, equivalent to CPU runtime, has a strong dependence on the ordering of the events. Different ranking methods can be used in order to reduce the number of cut sets, and consequently, to reduce the computational runtime. Note that there is no method that provides the minimum size of BDD in all cases. The following methods have been considered in this paper: Top-down-left-right, Depth First Search, AND, Breath First Search, and Level. The AND method has chosen for ranking the events because it provides the best results in this case. For further information about BDDs readers are recommended to see references [20,22,26,27].
The quantitative analysis also takes into account the importance of each basic event within the global system. With this purpose, different importance measures (IMs) are considered in this paper. IMs are used in reliability and risk analysis to quantifying the impact of single component on a system failure [32]. In order to determine the importance of a component, it is necessary to consider all the related basic events as a group [33]. A complete importance analysis of all groups is therefore impractical for large systems, and it is necessary to focus on the most important groups of components [34]. In this work Birnbaum and Criticality IMs are presented.
Birnbaum IM introduced, for an event k, a measure of importance based on the fault probability of the system caused by the failure of the component k [35]. The priority of the event k is given by its Birnbaum IM and is calculated as follows:
where is the failure probability assigned to the k event, and is the probability of the top event. A drawback related to the Birnbaum IM is that it does not consider the failure probability of the k event and, therefore, a high importance can be assigned to rare events.
Criticality IM [18], in contrast to Birnbaum, takes into account the failure probability of a certain component. It rectifies the drawback presented in Birnbaum IM, balancing the values obtained. It is defined as:
where is the Criticality IM of the k event, is the probability assigned to the k event and is the top event probability. Criticality IM provides a different perspective than the Birnbaum IM, even though both are connected providing a measurement of the criticality of each components. Therefore, the Criticality IM has been employed in the following sections to carry out a simulation as realistic as possible.
4. FTA for WTs
A study of failure modes and effects analysis (FMEA) for WTs in 2010 (RELIAWIND project) collected the causes of failure and failure modes of a specific WT of 2MW with a diameter of 80 m [35]. Some causes of failures (or root causes) are summarized in [36]. These main causes of the failures can be due to environmental conditions (e.g., lightning, ice, fire, strong winds, etc.) or to defects, malfunctions or failures in the components of the WT (e.g., braking system failure, or be struck by blade, etc.) [37,38]. The causes of failures (or root causes) of the components of a wind turbine can be summarized as follows [35,39]: structural (design fault, external damage, installation defect, maintenance fault, manufacturing defect, mechanical overload, mechanical overload–collision, mechanical overload–wind, presence of debris); wear (corrosion, excessive brush wear, fatigue, pipe puncture, vibration fatigue, overheating, insufficient lubrication); electrical (calibration error, connection failure, electrical overload, electrical short, insulation failure, lightning strike, loss of power input, conducting debris, software design fault). Some of the principal component failure modes of WTs are [35,39]: mechanical (rupture, uprooting, fracture, detachment, thermal, blockage, misalignment, scuffing); electrical (electrical insulation, electrical failure, output inaccuracy, software fault, intermittent output); material (fatigue, structural, ultimate, buckling, deflection).
In this work, the construction of the illustrative FT has been focused on a three blades, pitch system and geared WT. The turbine has been divided into four major groups of elements for a better FTA: The foundation and tower; the blades system; the electrical components (including generator, electrical and electronic components), and; the power train (including speed shafts, bearings and a gearbox). The elements of the FT are connected by AND and OR gates, and their fault probability is unknown. The failures considered in this paper are set by an exhaustive review of the literature and the support of experts from the NIMO and OPTIMUS FP7 European projects [40,41].
Table 1 shows a summary of the failures from the literature taken into account for this paper. It can be seen that gearboxes, generators, blades and electric and control systems have been extensively studied in the literature, but there are not many references about other components such as brakes, hydraulic and yaw systems.

Table 1.
Failures of the main elements of a WT.
| Foundation and Tower Failure | Structural fault [17,38,42,43,44,45] | |
| Yaw system failure [46] | ||
| Critical Rotor Failure | Blade failure | Structural failure [17,34,47,48,49,50,51,52,53] |
| Pitch system failure [54,55] | ||
| Hydraulic system fault [50,56] | ||
| Meteorological unit failure [50,57] | ||
| Rotor system failure | Rotor hub [42,46] | |
| Bearings [45,46,47] | ||
| Power Train Failure | Low speed train failure [17,46,48] | |
| Critical gearbox failure [7,46,53,58,59,60,61,62] | ||
| High speed train failure | Shaft [6,46,58] | |
| Critical brake failure [6,56] | ||
| Electrical Components Failure | Critical generator failure [6,46,58,60,63,64,65] | |
| Power electronics and electric controls failure [17,56,58,60] | ||
The following sub-sections show the events or components considered to build the FT presented in Appendix 1. This FT is built from the different sub-trees that correspond to the four main parts of a WT aforementioned (see also the first column of Table 1). The components and faults that are involved in system failures are obtained from the NIMO and OPTIMUS European Projects. The interrelation between these faults is also done considering the literature. The FT in Appendix 1 is composed by the following four main sub-trees:
- -
- g001 corresponds to a “Foundation and Tower Failure” described in Section 4.1.
- -
- g002 corresponds to a “Critical Rotor Failure” depicted in Section 4.2.
- -
- g003 corresponds to a “Power Train Failure” showed in Section 4.4.
- -
- g004 corresponds to a “Electrical Components Failure” presented in Section 4.3.
4.1. Foundation and Tower
The tower supports the nacelle that is located at a suitable height in order to minimize the influence of turbulence and to maximize the wind energy. The tower is assembled by thin-wall cylindrical elements welded together along their perimeters in three sections that are joined by bolts. This is done in order to enable the transportation of the large structural elements to the wind farm where they need to be assembled [66]. The base section of the tower is installed on a reinforced concrete foundation comprising a square base [67].
Structural defects associated with the tower, foundation, blades and hub, in the form of fatigue cracks, delamination etc., can initiate and evolve with time [44]. The main causes for structural failures are fatigue induced crack initiation and propagation, extreme wind speeds and distribution, extreme turbulences, maximum flow inclination and terrain complexity [39], and also the fire, ice accumulation or lightning bolt strikes. Material fatigue [38] (tower-based fatigue damage has been shown to decrease significantly when using active pitch for the blades [40,43]), impact of blades on the tower, faulty welding and failure of the brakes [45] are the main representative failure modes.
The literature shows that the major faults found on WT towers are: cracks in the concrete base, corrosion, gaps in the foundation section, loosen studs joining the foundation and the first section, loosen bolts joining first/second and second/third sections and welding damages [38].
On the top of the tower, the yaw system turns the nacelle in an optimum angle with respect to the wind direction. Powered by electrical or hydraulic mechanisms (this paper the electrical is considered), the yaw systems can fail due to the failure of the yaw motor or the meteorological unit [46] resulting in a wrong yaw angle. Structural failures could appear when the yaw motor is damaged or it does not have power supply, in addition to extreme wind speed or turbulences and some structural faults. These structural failures can cause the collapse of the tower [38].
4.2. Blade System
The rotor is located inside the nacelle. The blades are attached to the rotor shaft by the hub and they are mounted on bearings in the rotor hub. The blades are the components of the WT with the highest percentage of failures and downtimes [68,69]. Ciang et al. reviewed damage detection methods [70] in 2008, considering in particular the blades [42]. The rotor hub supports heavy loads that can lead to faults such as clearance loosening at the blade root, imbalance, cracks and surface roughness [46]. Bearings between blades and hub can be damaged by wear produced by pitting, deformation of outer face and rolling elements of the bearings [46], spalling and overheating [56]. Cracks can appear due to the fatigue [56]. Faults in lubrication and corrosion of pins are typically the main failure cause of bearings.
The blades faults are predominantly related to structural failures, e.g., strength [47] and fatigue of the fibrous composite materials. Other faults, e.g., cracks, erosions, delamination and debonding, could appear in the leading and trailing edges of the blades [48,69]. Delamination and debonding or cracks are found in the shell [49,50], and also in the root section of the blades [51]. The tip deflections (a structural failure of the blade [46]) increase drag near the end of the blades [53].
A common fault of the blades is associated with the failure of the pitch control system [54]. In pitch-controlled turbines, the pitch system is a mechanism that turns the blade, or part of the blade, in order to adjust the angle of attack of the wind. Turbulence of wind is an important cause for pitch system faults [71]. Pitching motion can be done by hydraulic actuators or electric motors. The hydraulic system leads stiffness of bearings, a little backlash and a higher reliability than the electric motors [52]. The hydraulic system can suffer from possible defects such as leakages, overpressure and corrosion [56].
The weather station or meteorological unit provides information about some characteristics of the wind (direction and speed) to the control system of the WT. The main failures found in the WT weather station are related to the vane and the anemometer faults [57]. These can be the cause of a wrong blade angle [50,55].
4.3. Generator, Electrical and Electronic Components
The generator, electrical and electronic components are installed inside the nacelle. The high speed shaft drives the rotational torque to the generator, where the mechanical energy is converted to electrical energy. This conversion needs a specific input speed, or a power electronic equipment to adapt the output energy from the generator to the characteristics of the grid.
Faults in generators can be the result of electrical or mechanical causes [65]. The main electrical faults are due to open-circuits or short-circuit of the winding in the rotor or stator [58] that could cause overheating [46]. Many research works have demonstrated that bearings, rotors and stators involve a high failure rate in WTs [63]. The bearing failures of the generator are usually caused by cracks, asymmetry and imbalance [72]. The rotor and stator failures can be produced by broken bars [64], air-gap eccentricities and dynamic eccentricities, among other failures [58]. Rotor imbalance and aerodynamic asymmetry can have their origin in the non-uniform accumulation of ice and dirt over the blades system [58]. Short-circuit faults, open-circuit faults and gate drive circuit faults are the three major electrical faults of the power electronics and electric controls in WTs [58]. Corrosion, dirt and terminal damage are the main mechanical defects [56]. The group formed by generator, electrical system and control system, has a relevant rate of failures and downtime in WTs.
4.4. Power Train
The power train, or drive train, is installed in the nacelle and is compound by the low speed train, the gearbox and the high speed train. Through the main bearing, the rotor is attached to the low speed shaft that drives the rotational energy to the gearbox. The rotational speed of the rotor is generally between 5 and 30 rpm, and the generator speed is from 750 to 1500 rpm, depending on the type and size of generator. A gearbox is mounted between the rotor and the generator in order to increase the rotational speeds. The gearbox output is driven to the generator through the high speed train. A mechanical brake powered by a hydraulic system is usually mounted in the high speed train as a secondary safe breaking system.
The low speed train failure includes main bearing [56] and low speed shaft defects. Severe vibrations can appear due to impending cracks in any component, or to the mass imbalance in the low speed shaft [58]. The gearbox failure is one of the most typical failures [53]. There are many studies about gearboxes in the literature because their failure causes significant downtimes in the system [73]. The most common faults were found in gear teeth and bearings due to lubrication faults [58], e.g., contamination due to defective sealing [54] or loss of oil [60], wear or fatigue damage which can generate pitting, cracking, gear eccentricity, gear tooth deterioration, offset or other potential faults [46,53].
Overheating can appear in shafts due to the rotational movement of the high speed train. The wear and fatigue, that can initiate cracks [46] and mass imbalance [58], are the principal source of failures in the high speed shaft. The main failure causes of brakes are overpressure or oil leakages [6], cracking of the brake disc and calipers [56].
5. Maintenance Management Approach
The maintenance management proposed in this paper aims to maximise the RAMS of the offshore wind farms optimising the resources such as human or material, conditioned to exogenous variables, e.g., weather conditions [74]. This approach is based on the probability of failure of each WT. The operation of the WT will be focused on a set of components collected by a FT (see Appendix 1). The fault probability of any component is simulated by a statistical function of failure probability over the time (see Appendix 2). Then, the failure probability of a WT is set by the Boolean expression obtained from the BDD. Therefore, according to the resources, the maintenance task will be done in the WTs that present more fault probability over a threshold set. It will lead to predict any preventive/predictive maintenance task over the time. The importance measurements will determine the components that need a maintenance task. A low probability threshold is set to determine if the fault probability of the WT is under control or not. The importance measurement is calculated with the Criticality IM method. The downtime can be defined as the period of time that is required to carry out the corresponding maintenance task. Each event of the fault tree has associated one maintenance task with a specific downtime. The downtime depends on endogenous and exogenous variables. Figure 3 shows the flowchart of the procedure maintenance management.
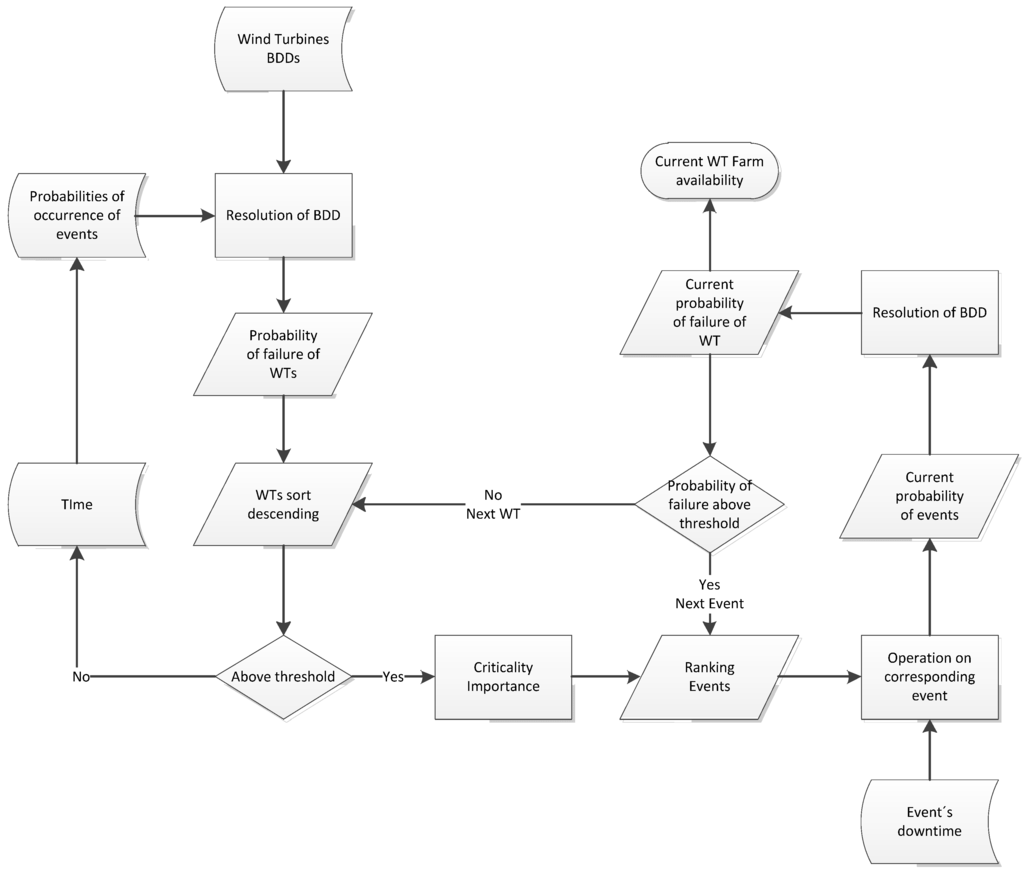
Figure 3.
The maintenance management procedure.
6. Case Study
An offshore wind farm composed by 20 WTs has been taken into account. The offshore wind farm has been designed taking into account considerations from expert of the NIMO and OPTIMUS research projects. It has been designed in order to demonstrate and validate the approach proposed in this paper. The WTs are the same type, with the same FT, given in Appendix 1. Different mathematical models have been defined for each event (see Appendix 2). These models have been based on time-dependent probability functions to describe the behavior of events over the time. These probability models are not intended to match exactly the real behavior of the events because there is no dataset to validate it, therefore it they have been set by the aforementioned expert. For example, the event e006 corresponds to the corrosion of the foundation or tower, where a linear increasing probability have been assigned to this event, this is due to the salinity that is assumed to be constant over the time. The main novelty lies in the procedure to elaborate qualitatively and quantitatively a preventive maintenance planning process based on the knowledge of the WTs and on statistical data that, for example, could be collected through condition monitoring systems [75,76]. The probability functions employed are:
- Constant probabilityIn this model the probability of the event is constant over the time:
- Exponential increasing probabilityIn this model, the probability function assigned is:where determines the rising velocity of the probability.
- Linear increasing probabilityIn this model, the probability function is:where m determines the rising velocity of the probability.
- Periodic probabilityThis model represents those components that need to be replaced, repaired, and zeroed in a periodical way. In this model, the events have a periodic behavior following the next expression:where is a positive parameter and determines the rising velocity of the probability, and is a parameter that defines the size of the time period.
Figure 4 shows the probability of the events of one WT over the time taken into account the probability function assigned to each event. The simulation has been carried out for 600 samples, where each sample can be considered as a period of one day. The objective is to propose an algorithm able to collect stochastic information of the failure probability of a complex system.
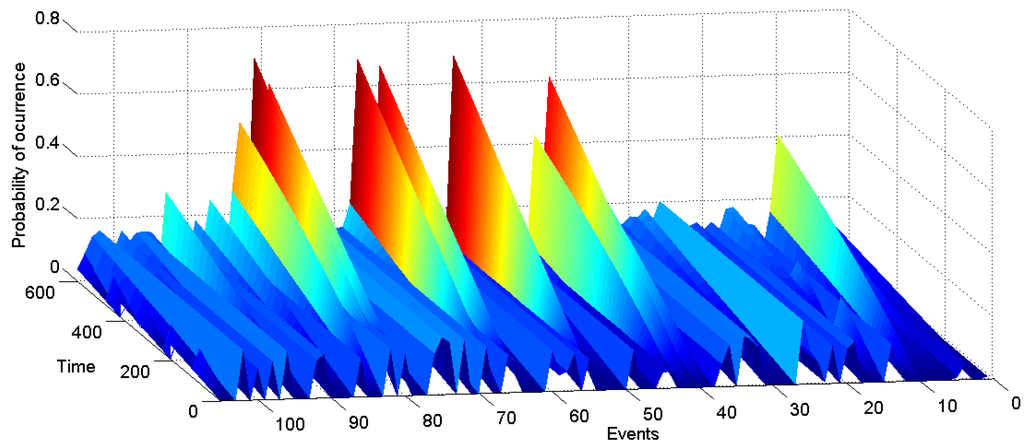
Figure 4.
Occurrence probabilities of events.
Considering the last probabilities obtained for each event and the analytical expression of the system failure provided by the BDD, the probability of failure for all WTs of the offshore wind farm can be achieved. Figure 5 presents the failure probability of each WT over the time. The probability of failure for each WT is different among them and over the time, because the values of the parameters that represent the occurrence function of each event are not exactly the same.
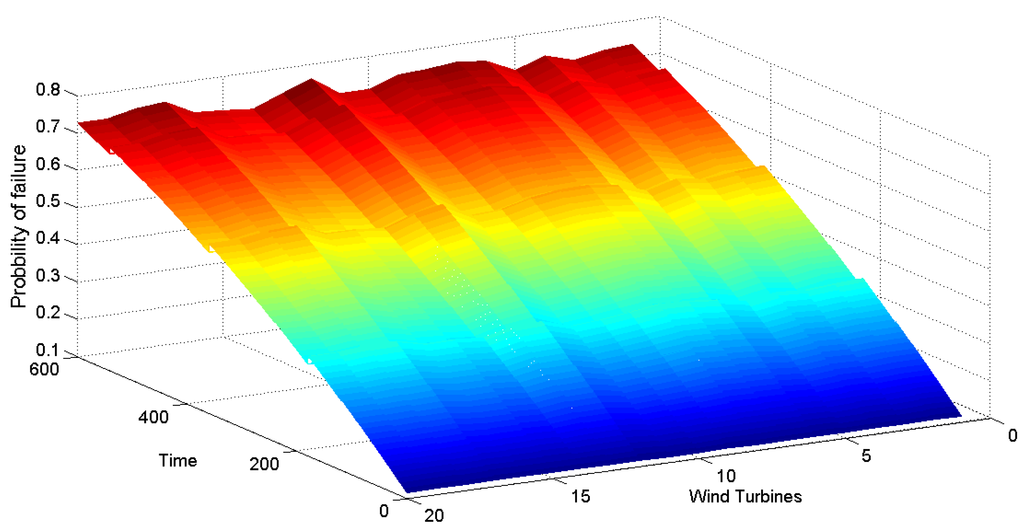
Figure 5.
Probabilities of failure of each WT over the time.
The components that require any maintenance task have been set by the importance measurements, specifically by the Criticality IM method. Figure 6 shows the criticality importance of the events of all WTs considered in this case study in a period of time (in this case the study has been considered for a total of 600 days).
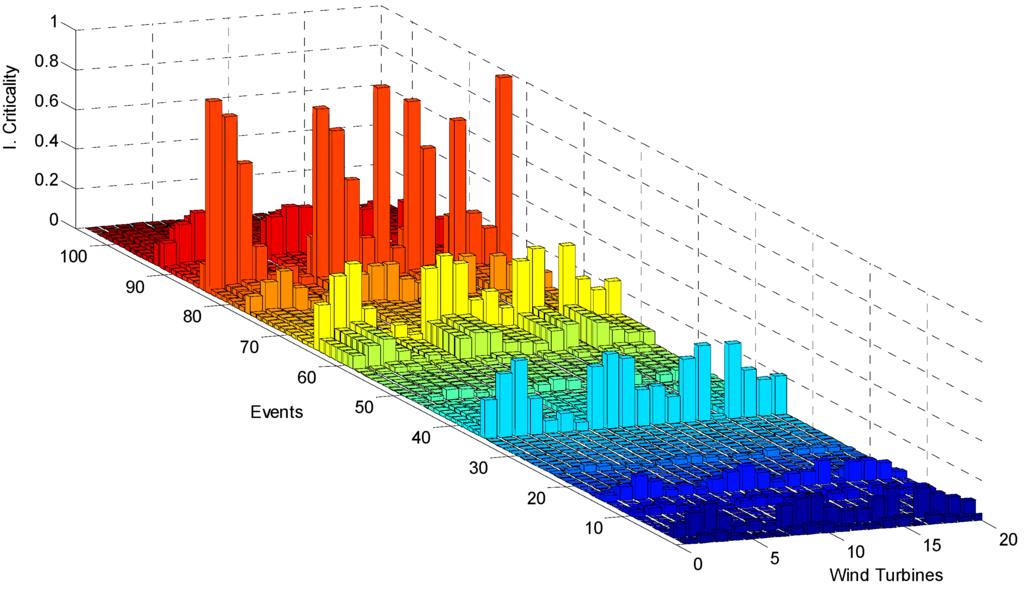
Figure 6.
Criticality importance of the events in a given time.
7. Results
The exogenous conditions such as maintenance budget, human and material resources and weather conditions will determine the downtimes, together with the time required to carry out any maintenance task. Figure 7 shows the fault probability over the time of a WT considering different maintenance polices. An upper probability threshold of 0.20 has been established to suggest when the maintenance must be started. Moreover, a lower threshold of 0.15 has been set indicating when the maintenance should be finished. The availability of resources will lead to attend to one or several WTs at the same time.
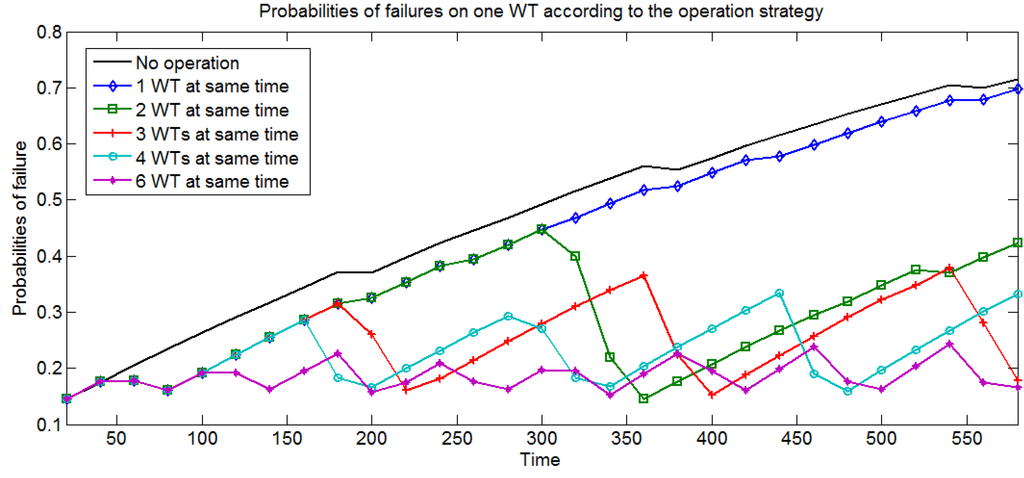
Figure 7.
Probabilities of failure of a WT.
The average fault probability of the offshore wind farm according to the resource employed is illustrated in Figure 8. The probability decreases when the potential of maintenance tasks is bigger. In this case study, the average fault probability of the offshore wind farm decreases faster when it is attended at the same time two instead of one WT, than four instead of three WTs. The main conclusion is that a correct resources use could optimize the average fault probability of the offshore wind farm.
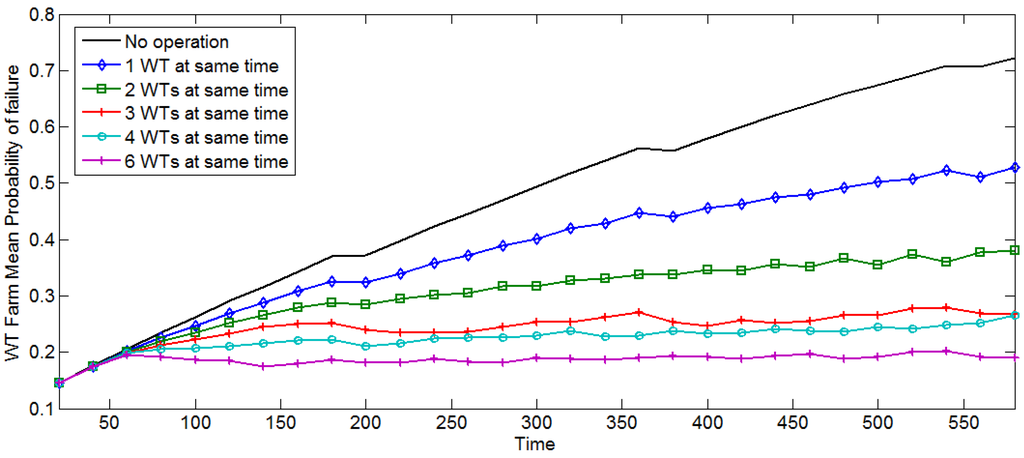
Figure 8.
Average fault probability of the offshore wind farm.
The boxplots of Figure 9 show the behavior of the offshore wind farm for different maintenance management policies. The approach lead to control the average probability of failure by a correct maintenance police, and the boxes to be smaller, i.e., presenting a homogeneous probability distribution in all WTs.
The maintenance management performance for offshore wind farms is subject to several uncertainties related to the randomness of exogenous conditions, e.g., weather conditions [77]. Therefore, the approach presented requires weather forecasting. Weather forecasting depends on the temperature, dew point, wind velocity, pressure, visibility, cloud height and quantity [4]. In addition, the state of the sea, the wind and the wave heights need to be considered. There are some probabilistic models based on historical wave height data that are used to determine the conditions of the sea in a certain moment, e.g., the Markovian wave height model [78], forecasting of safe sea-state using finite elements method and artificial neural networks [79], short-term predictions based on nonlinear deterministic time series analysis [80], Gaussian processes [81], resampling methods, parametric models, etc.
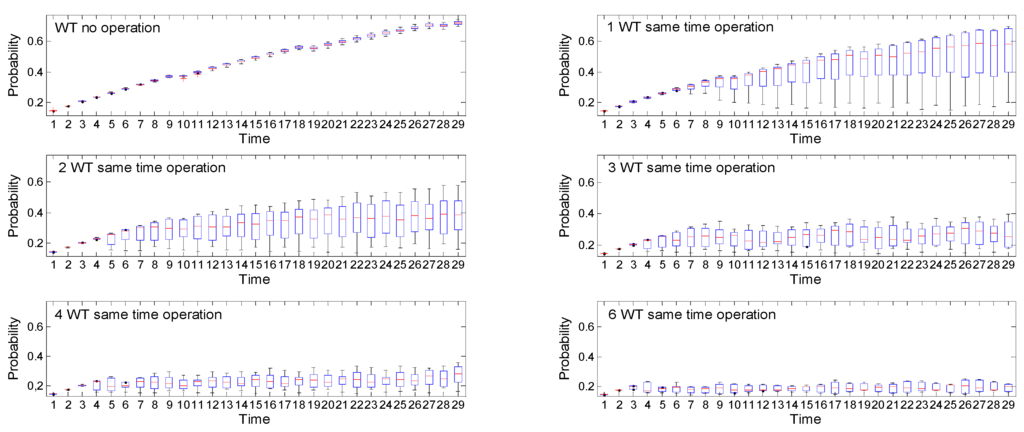
Figure 9.
Boxplot of the fault probability of the offshore wind farm for WT operated at the same time.
The maintenance task will be carried out when certain permission value is reached. This dimensionless value, which varies from 0 to 1, will be given by a weighting of the weather conditions and external permissions. It has been simulated in this paper and validated by experts. Figure 10 shows the maximum allowed value assigned to each event. The maximum allowed valued is randomly generated for this case. It is due to the goal of this study is to clarify how the proposed methodology should be applied, taking into account that the method is close to the reality only from the qualitative point of view. This value is compared with a predicted value given randomly in this paper in order to consider the stochastic of the system. If the value assigned to the task is bigger than the predicted value, the maintenance task must be carried out, in other case, it must be necessary to wait for a suitable value from the forecasting.
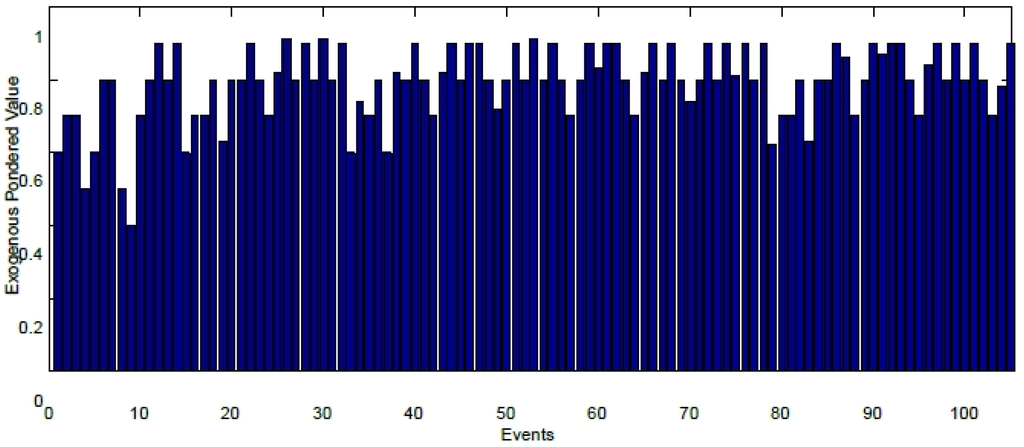
Figure 10.
Maximum allowed exogenous pondered value for each maintenance tasks.
Figure 11 shows a randomized forecasting value of the weather conditions given for each day (sample) evaluated in the example. This figure can be used to determine the tasks that can be performed according to the exogenous variables. For example, in the 100th day (green circle) there is a value of 0.2 (this value is a ponderation between temperature, dew point, wind velocity, pressure, visibility, etc.), i.e., any maintenance task can be carried out because this value is lower than all the maximum allowed exogenous pondered values. However, in the 300th day (red circle) none of the tasks can be carried out because the value is higher than the allowable value in all the cases.

Figure 11.
Representative exogenous pondered value forecasting per day.
Figure 12 represents the weather influence on the distribution of the failure probabilities of the WTs over the time. Different weather scenarios have been taken into account randomly in order to evaluate the weather conditions and the influence to the maintenance tasks.
Figure 12.
Influence of exogenous variables on the state of the offshore wind farm.
In the top boxplot of Figure 12, the weather conditions have not been taken into account. In the second one, the weather forecasting presented in Figure 11 has been considered. In the last one boxplot, an adverse weather conditions have been established. The presence of adverse weather conditions makes to increase the average fault probability of the offshore wind farm, and the size of the boxes of boxplot decreases because the maintenance tasks that can be done are minimum.
8. Conclusions
The offshore wind energy is being supported by the international community. Offshore wind farms employ large and complex wind turbines that generate more power electricity than onshore. The farms are located in places with difficulty to access that depends of the weather conditions. These conditions have leaded the development of robust remote condition monitoring system in order to increase the RAMS of the offshore wind farms.
This paper presents the BDD in order to evaluate qualitatively the FTA of a WT. The approach is based on the fault probabilities of each component of the WT, that depend of a statistical function of probability of occurrence over the time. The fault probability of the WT has been set by the Boolean expression obtained by the BDD. An optimal ranking of the events has been done for minimising the computational cost.
The IMs have been employed in order to facilitate the improvement of the maintenance management and the resources deployment in an offshore wind farm, where a proper and accurate prioritization of the basic events has been elaborated according to Criticality IM method.
The maintenance management approach proposed in this paper maximise the RAMS of the offshore wind farm, optimising the resources as human, materials, etc. The maintenance task will be carried out in the WTs that present more fault probability over a threshold. It will lead to establishment of preventive/predictive maintenance tasks over time. A low probability threshold has also been set to determine when the fault probability of the WT is under control. The time to carry out a maintenance task has been established by the downtime associated to each failure. The downtime depends on the time to repair or replace the component, human resourcesstate of the sea, etc.
It has been demonstrated that the average fault probability of the offshore wind farm decreases more when two instead of one WT can be attended at the same time than between four instead of three. The main conclusion is that there is a reasonable amount of resources that allow controlling the average fault probability of the offshore wind farm, and this method can be used to calculate this value.
The weather conditions have been also considered. The average fault probability of the offshore wind farm increases when there is a presence of adverse weather conditions. The adverse weather increases the gap between the failure probabilities of the different WTs that compose the wind farm because the maintenance tasks that can be done are minimum.
The dynamic analysis proposed in this paper can be used to improve the maintenance planning using the fault probability of the system over the time. The fault probability and the IMs determine when the maintenance tasks must be carried out and to set the tasks over the events.
The qualitative data used in this paper is gathered from several research projects and the results have been validated by experts involve in the research projects. The main novelty of the paper is the procedure to analyse endogenous and exogenous data using graphical tools.
Acknowledgments
The work reported herewith has been financially supported by the European Commission under the European FP7 OPTIMUS project [41], and the Spanish Ministerio de Economía y Competitividad, under Research Grant DPI2012-31579.
Author Contributions
Alberto Pliego, Fausto García and Jesús Pinar conceived and designed the experiments; Alberto Pliego, Fausto García and Jesús Pinar performed the experiments; Alberto Pliego, Fausto García and Jesús Pinar analyzed the data Alberto Pliego, Fausto García and Jesús Pinar contributed reagents/materials/analysis tools; Alberto Pliego, Fausto García and Jesús Pinar wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix 1. FT for a Wind Turbine
Appendix 2. Events and Probabilistic Models
| Fault Tree 1 Foundation and Tower Failure | Probabilistic Model Assignment | |||
| Intermediate Event | Code | Final Event | Code | |
| Yaw System Failure | g005 | Yaw motor fault | e001 | Constant |
| Critical Structural Failure | g006 | Abnormal Vibration I | e002 | Linear Increasing |
| yaw motor failure | g007 | Abnormal Vibration H | e003 | Linear Increasing |
| Wrong Yaw Angle | g008 | Cracks in concrete base | e004 | Constant |
| Structural Failure (Foundation and tower) | g009 | Welding damage | e005 | Constant |
| No electric power for yaw motor | g010 | Corrosion | e006 | Linear Increasing |
| Metereologhical Unit Failure | g011 | Loosen studs in joining foundation and first section | e007 | Linear Increasing |
| Structural Fault (Foundation and tower) | g012 | Loosen bolts in joining different sections | e008 | Linear Increasing |
| Gaps in the foundation section | e009 | Exponential Increasing | ||
| Vane damage | e010 | Exponential Increasing | ||
| Anemometer damage | e011 | Exponential Increasing | ||
| High wind speed | e012 | Periodic | ||
| No power supply from generator | e013 | Constant | ||
| No power supply from grid | e014 | Constant | ||
| Fault Tree 2 Critical Rotor Failure | Probabilistic Model Assignment | |||
| Intermediate Event | Code | Final Event | Code | |
| Critical blade failure | g013 | High wind speed | e015 | Periodic |
| Blade Failure | g014 | Blade Angle asymmetry | e016 | Exponential Increasing |
| Pitch System Failure | g015 | Abnormal Vibration A | e017 | Exponential Increasing |
| Critical structural Failure (Blades) | g016 | Motor failure | e018 | Exponential Increasing |
| Hydraulic system Failure | g017 | Leakages | e019 | Constant |
| Wrong Blade Angle | g018 | Over pressure | e020 | Constant |
| Hydraulic system Fault | g019 | Corrosion | e021 | Exponential Increasing |
| Metereologhical Unit Failure | g020 | Vane damage | e022 | Constant |
| Structural Failure (Blades) | g021 | Anemometer damage | e023 | Constant |
| Leading and traililling edges | g022 | Abnormal Vibration B | e024 | Constant |
| Shell | g023 | Root Cracks | e025 | Constant |
| Tip | g024 | Cracks | e026 | Constant |
| Rotor System Failure | g025 | Erosion | e027 | Exponential Increasing |
| Rotor System Fault | g026 | Delamination in leading edges of blades | e028 | Exponential Increasing |
| Bearings (Rotor) | g027 | Delamination in trailing edges of blades | e029 | Exponential Increasing |
| Rotor Hub | g028 | Debonding in edges of blades | e030 | Exponential Increasing |
| Wear | g029 | Delamination in shell | e031 | Exponential Increasing |
| Imbalance | g030 | Crack with structural damage | e032 | Constant |
| Crack on the beam-shell joint | e033 | Constant | ||
| Open tip | e034 | Constant | ||
| Lightning strike | e035 | Periodic | ||
| Abnormal Vibration C | e036 | Constant | ||
| Cracks | e037 | Constant | ||
| Corrosion of Pins | e038 | Exponential Increasing | ||
| Abrasive Wear | e039 | Exponential Increasing | ||
| Pitting | e040 | Linear Increasing | ||
| Deformation of face & rolling element | e041 | Linear Increasing | ||
| Lubrication Fault | e042 | Linear Increasing | ||
| Clearance loosening at root | e043 | Exponential Increasing | ||
| Cracks | e044 | Constant | ||
| Surface Roughness | e045 | Constant | ||
| Mass Imbalance | e046 | Exponential Increasing | ||
| Fault in Pitch adjustment | e047 | Exponential Increasing | ||
| Fault Tree 3 Electrical Components Failure | Probabilistic Model Assignment | |||
| Intermediate Event | Code | Final Event | Code | |
| Critical Generator Failure | g031 | Abnormal Vibration G | e048 | Exponential Increasing |
| Power Electronics and Electric Controls Failure | g032 | Cracks | e049 | Constant |
| Mechanical Failure (Generator) | g033 | Imbalance | e050 | Exponential Increasing |
| Electrical Failure (Generator) | g034 | Asymmetry | e051 | Exponential Increasing |
| Bearing Generator Failure | g035 | Air-Gap eccentricities | e052 | Linear Increasing |
| Rotor and Stator Failure | g036 | Broken bars | e053 | Linear Increasing |
| Bearing Generator Fault | g037 | Dynamic eccentricity | e054 | Linear Increasing |
| Rotor and Stator Fault | g038 | Sensor T error | e055 | constant |
| Abnormal Signals A | g039 | T above limit | e056 | Periodic |
| Overwarming generator | g040 | Short Circuit (Gen) | e057 | Constant |
| Electrical Fault (PE) | g041 | Open Circuit (Gen) | e058 | Constant |
| Mechanical Fault (PE) | g042 | Short Circuit | e059 | Constant |
| Open Circuit | e060 | Constant | ||
| Gate drive circuit | e061 | linear increasing | ||
| Corrosion | e062 | Periodic | ||
| Dirt | e063 | Periodic | ||
| Terminals damage | e064 | linear increasing | ||
| Fault Tree 4 Power Train Failure | Probabilistic Model Assignment | |||
| Intermediate Event | Code | Final Event | Code | |
| Low speed train Failure | g043 | Abnormal Vibration D | e065 | Constant |
| Critical Gearbox Failure | g044 | Cracks in main bearing | e066 | Constant |
| High speed train Failure | g045 | Spalling | e067 | Linear Increasing |
| Main Bearing failure | g046 | Corrosion of Pins | e068 | Linear Increasing |
| Low speed shaft failure | g047 | Abrasive Wear | e069 | Constant |
| Main Bearing fault | g048 | Deformation of face & rolling element | e070 | Linear Increasing |
| Wear main bearing | g049 | Pitting | e071 | exponential increasing |
| Low speed shaft fault | g050 | Imbalance | e072 | Constant |
| Wear low shaft | g051 | Cracks in l.s. shaft | e073 | Linear Increasing |
| Gearbox Fault | g052 | Spalling | e074 | Constant |
| Bearings failure(Gearbox) | g053 | Abrasive Wear | e075 | Constant |
| Lubrication fault | g054 | Pitting | e076 | Constant |
| Gear Failure | g055 | Abnormal Vibration F | e077 | Linear Increasing |
| Wear bearing gearbox | g056 | Corrosion of Pins | e078 | Exponential Increasing |
| Gear Fault | g057 | Abrasive Wear | e079 | Linear Increasing |
| Tooth Wear | g058 | Pitting | e080 | Constant |
| Offset | g059 | Deformation of face & rolling element | e081 | Linear Increasing |
| High speed shaft Failure | g060 | Oil Filtration | e082 | Constant |
| Critical Brake Failure | g061 | Particle Contamination | e083 | Exponential Increasing |
| High speed structural damage | g062 | Overwarming gearbox | e084 | Linear Increasing |
| Wear high shaft | g063 | Abnormal Vibration E | e085 | Periodic |
| Brake Fault | g064 | Eccentricity | e086 | Constant |
| Abnormal Signals B | g065 | Pitting | e087 | Linear Increasing |
| Hydraulic brake system Fault | g066 | Cracks in gears | e088 | Exponential Increasing |
| Abnormal Signals C | g067 | Gear tooth deterioration | e089 | Exponential Increasing |
| Overwarming brake | g068 | Poor design | e090 | Periodic |
| Tooth surface defects | e091 | Constant | ||
| Abnormal Vibration J | e092 | Constant | ||
| Cracks in h.s. shaft | e093 | Linear Increasing | ||
| Imbalance | e094 | Periodic | ||
| Overwarming | e095 | Exponential Increasing | ||
| Spalling | e096 | Constant | ||
| Abrasive Wear | e097 | Linear Increasing | ||
| Pitting | e098 | Constant | ||
| Cracks in brake disk | e099 | Exponential Increasing | ||
| Motor brake fault | e100 | Constant | ||
| Oil Leakage | e101 | Linear Increasing | ||
| Over pressure | e102 | Constant | ||
| Abnormal speed | e103 | Linear Increasing | ||
| T sensor error | e104 | Periodic | ||
| T above limit | e105 | Periodic | ||
References
- Márquez, F.P.G.; Tobias, A.M.; Pérez, J.M.P.; Papaelias, M. Condition monitoring of wind turbines: Techniques and methods. Renew. Energy 2012, 46, 169–178. [Google Scholar] [CrossRef]
- Esteban, M.D.; Diez, J.J.; López, J.S.; Negro, V. Why offshore wind energy? Renew. Energy 2011, 36, 444–450. [Google Scholar] [CrossRef]
- Guidelines for the Certification of Condition Monitoring Systems for Wind Turbines; Germanisher LLoyd: Hamburg, Germany, 2007.
- Tavner, P. Offshore Wind Turbines Reliability, Availability and Maintenance; The Institution of Engineering and Technology: London, UK, 2012. [Google Scholar]
- Novaes Pires, G.; Alencar, E.; Kraj, A. Remote Conditioning Monitoring System for a Hybrid Wind Diesel System-Application at Fernando de Naronha Island. Brasil. Available online: http://www.globalislands.net/userfiles/_brazil_FdNpdf2.pdf (accessed on 10 July 2015).
- Tsai, C.-S.; Hsieh, C.-T.; Huang, S.-J. Enhancement of damage-detection of wind turbine blades via CWT-based approaches. IEEE Trans. Energy Convers. 2006, 21, 776–781. [Google Scholar] [CrossRef]
- Guo, P.; Bai, N. Wind turbine gearbox condition monitoring with AAKR and moving window statistic methods. Energies 2011, 4, 2077–2093. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electronics 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Jiang, W.; Fan, Q.; Gong, J. Optimization of welding joint between tower and bottom flange based on residual stress considerations in a wind turbine. Energy 2010, 35, 461–467. [Google Scholar] [CrossRef]
- Pérez, J.M.P.; Márquez, F.P.G.; Tobias, A.; Papaelias, M. Wind turbine reliability analysis. Renew. Sustain. Energy Rev. 2013, 23, 463–472. [Google Scholar] [CrossRef]
- Soua, S.; van Lieshout, P.; Perera, A.; Gan, T.-H.; Bridge, B. Determination of the combined vibrational and acoustic emission signature of a wind turbine gearbox and generator shaft in service as a pre-requisite for effective condition monitoring. Renew. Energy 2013, 51, 175–181. [Google Scholar] [CrossRef]
- Chacon, J.L.F.; Andicoberry, E.A.; Kappatos, V.; Asfis, G.; Gan, T.-H.; Balachandran, W. Shaft angular misalignment detection using acoustic emission. Appl. Acoust. 2014, 85, 12–22. [Google Scholar] [CrossRef]
- Park, S.; Inman, D.J.; Yun, C.-B. An outlier analysis of MFC-based impedance sensing data for wireless structural health monitoring of railroad tracks. Eng. Struct. 2008, 30, 2792–2799. [Google Scholar] [CrossRef]
- De la Hermosa González, R.R.; Márquez, F.P.G.; Dimlaye, V.; Ruiz-Hernández, D. Pattern recognition by wavelet transforms using macro fibre composites transducers. Mech. Syst. Signal Proc. 2014, 48, 339–350. [Google Scholar] [CrossRef]
- Nie, M.; Wang, L. Review of condition monitoring and fault diagnosis technologies for wind turbine gearbox. Procedia CIRP 2013, 11, 287–290. [Google Scholar] [CrossRef]
- Zeng, Z.; Tao, N.; Feng, L.; Li, Y.; Ma, Y.; Zhang, C. Breakpoint detection of heating wire in wind blade moulds using infrared thermography. Infrared Phys. Technol. 2014, 64, 73–78. [Google Scholar] [CrossRef]
- García Márquez, F.P.; Pinar Pérez, J.M.; Pliego Marugán, A.; Papaelias, M. Identification of critical components of wind turbines using FTA over the time. Renew. Energy 2016, 87, 869–883. [Google Scholar] [CrossRef]
- Lambert, H.E. Measures of Importance of Events and Cut Sets. Reliability and Fault Tree Analysis; SIAM: Philadelphia, PA, USA, 1975; pp. 77–100. [Google Scholar]
- Pliego Marugán, A.; García, F.P. A novel approach to diagnostic and prognostic evaluations applied to railways: A real case study. J. Rail Rapid Transit 2015. [Google Scholar] [CrossRef]
- Sinnamon, R.M.; Andrews, J.D. Fault tree analysis and binary decision diagrams. In Proceedings of the Reliability and Maintainability Symposium, Las Vegas, NV, USA, 22–25 January 1996; pp. 215–222.
- Jinglun, Z.; Quan, S. Reliability analysis based on binary decision diagrams. J. Qual. Maint. Eng. 1998, 4, 150–161. [Google Scholar] [CrossRef]
- Bryant, R.E. Graph-based algorithms for Boolean function manipulation. IEEE Trans. Comput. 1986, 100, 677–691. [Google Scholar] [CrossRef]
- Remenyte, R.; Andrews, J.D. Qualitative analysis of complex modularized fault trees using binary decision diagrams. Proc. Inst. Mech. Eng. O 2006, 220, 45–53. [Google Scholar] [CrossRef]
- Prescott, D.R.; Remenyte-Prescott, R.; Reed, S.; Andrews, J.; Downes, C. A reliability analysis method using binary decision diagrams in phased mission planning. Proc. Inst. Mech. Eng. Part O 2009, 223, 133–143. [Google Scholar] [CrossRef]
- Moret, B.M. Decision trees and diagrams. ACM Comput. Surv. 1982, 14, 593–623. [Google Scholar] [CrossRef]
- Lee, C.-Y. Representation of switching circuits by binary-decision programs. Bell Syst. Technol. J. 1959, 38, 985–999. [Google Scholar] [CrossRef]
- Akers, S.B. Binary decision diagrams. IEEE Trans. Comput. 1978, 100, 509–516. [Google Scholar] [CrossRef]
- Pliego Marugán, A.; García Márquez, F.P.; Lorente, J. Decision making process via binary decision diagram. Int. J. Manag. Sci. Eng. Manag. 2015, 10, 3–8. [Google Scholar] [CrossRef]
- Fujita, M.; Fujisawa, H.; Kawato, N. Evaluation and improvements of Boolean comparison method based on binary decision diagrams. In Proceedings of the Computer-Aided Design IEEE International Conference (ICCAD-88), Santa Clara, CA, USA, 7–10 November 1988; pp. 2–5.
- Márquez, F.P.G.; Mangurán, A.P.; Zaman, N. For information systems design. Softw. Dev. Technol. Constr. Inf. Syst. Des. 2013, 1, 308–318. [Google Scholar]
- Brace, K.S.; Rudell, R.L.; Bryant, R.E. Efficient implementation of a BDD package. In Proceedings of the 27th ACM/IEEE Design Automation Conference, Orlando, FL, USA, 24–28 June 1991; pp. 40–45.
- Liu, Q.; Homma, T. A new computational method of a moment-independent uncertainty importance measure. Reliab. Eng. Syst. Saf. 2009, 94, 1205–1211. [Google Scholar] [CrossRef]
- Cheok, M.C.; Parry, G.W.; Sherry, R.R. Use of importance measures in risk-informed regulatory applications. Reliab. Eng. Syst. Saf. 1998, 60, 213–226. [Google Scholar] [CrossRef]
- Birnbaum, Z.W. On the Importance of Different Components in a Multicomponent System; Washington University Seattle Lab of Statistical Research: Washington, DC, USA, 1968. [Google Scholar]
- Arabian-Hoseynabadi, H.; Oraee, H.; Tavner, P. Failure modes and effects analysis (FMEA) for wind turbines. Int. J. Electr. Power Energy Syst. 2010, 32, 817–824. [Google Scholar] [CrossRef]
- RELIAWIND Project. European Union’s Seventh Framework Programme for RTD (FP7). Available online: http://www.reliawind.eu/ (accessed on 22 January 2014).
- Lotsberg, I. Structural mechanics for design of grouted connections in monopile wind turbine structures. Mar. Struct. 2013, 32, 113–135. [Google Scholar] [CrossRef]
- Chou, J.-S.; Tu, W.-T. Failure analysis and risk management of a collapsed large wind turbine tower. Eng. Fail. Anal. 2011, 18, 295–313. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. Wind Turbine—Part 1: Design Requirements, IEC 61400-1; International Electrotechnical Commission: Geneva, Switzerland, 2005. [Google Scholar]
- Development and Demonstration of a Novel Integrated Condition Monitoring System for Wind Turbines, NIMO Project. (NIMO, Ref.:FP7-ENERGY-2008-TREN-1: 239462). Available online: http://www.nimoproject.eu (accessed on 30 January 2012).
- Demonstration of Methods and Tools for the Optimisation of Operational Reliability of Large-Scale Industrial Wind Turbines, OPTIMUS Project. (OPTIMUS, Ref.: FP-7-Energy-2012-TREN-1: 322430). Available online: http://www.optimusproject.eu (accessed on 25 February 2014).
- Ciang, C.C.; Lee, J.-R.; Bang, H.-J. Structural health monitoring for a wind turbine system: A review of damage detection methods. Meas. Sci. Technol. 2008, 19. [Google Scholar] [CrossRef]
- Stol, K.A. Disturbance tracking control and blade load mitigation for variable-speed wind turbines. J. Sol. Energy Eng. 2003, 125, 396–401. [Google Scholar] [CrossRef]
- Caithness Windfarm Information Forum. Available online: http://www.caithnesswindfarms.co.uk/ (accessed on 30 January 2012).
- Cotton, I.; Jenkins, N.; Pandiaraj, K. Lightning protection for wind turbine blades and bearings. Wind Energy 2001, 4, 23–37. [Google Scholar] [CrossRef]
- Hameed, Z.; Hong, Y.; Cho, Y.; Ahn, S.; Song, C. Condition monitoring and fault detection of wind turbines and related algorithms: A review. Renew. Sustain. Energy Rev. 2009, 13, 1–39. [Google Scholar] [CrossRef]
- Padgett, W. A multiplicative damage model for strength of fibrous composite materials. IEEE Trans. Reliab. 1998, 47, 46–52. [Google Scholar] [CrossRef]
- Jørgensen, E.R.; Borum, K.K.; McGugan, M.; Thomsen, C.; Jensen, F.M.; Debel, C.; Sørensen, B.F. Full Scale Testing of Wind Turbine Blade to Failure-Flapwise Loading; RISØ National Laboratory: Copenhagen, Denmark, 2004. [Google Scholar]
- Jensen, F.M.; Falzon, B.; Ankersen, J.; Stang, H. Structural testing and numerical simulation of a 34m composite wind turbine blade. Compos. Struct. 2006, 76, 52–61. [Google Scholar] [CrossRef]
- Borum, K.K.; McGugan, M.; Brondsted, P. Condition monitoring of wind turbine blades. In Proceedings of the 27th Riso International Symposium on Materials Science: Polymer Composite Materials for Wind Power Turbines, Denmark, 4–7 September 2006; pp. 139–145.
- Van Leeuwen, H.; van Delft, D.; Heijdra, J.; Braam, H.; Jo̸rgensen, E.; Lekou, D.; Vionis, P. Comparing Fatigue Strength from Full Scale Blade Tests with Coupon-Based Predictions; American Society of Mechanical Engineers: New York, NY, USA, 2002; pp. 1–9. [Google Scholar]
- Griffin, D.A.; Zuteck, M.D. Scaling of composite wind turbine blades for rotors of 80 to 120 meter diameter. J. Sol. Energy Eng. 2001, 123, 310–318. [Google Scholar] [CrossRef]
- Herbert, G.J.; Iniyan, S.; Sreevalsan, E.; Rajapandian, S. A review of wind energy technologies. Renew. Sustain. Energy Rev. 2007, 11, 1117–1145. [Google Scholar] [CrossRef]
- Gray, C.S.; Watson, S.J. Physics of failure approach to wind turbine condition based maintenance. Wind Energy 2010, 13, 395. [Google Scholar] [CrossRef]
- Maughan, J.R. Technology and reliability improvements in GE’s 1.5 MW WT fleet. In Proceedings of the 2nd WT Reliability Workshop, Albuquerque, NM, USA, 17–18 September 2007.
- Liu, W.; Tang, B.; Jiang, Y. Status and problems of wind turbine structural health monitoring techniques in china. Renew. Energy 2010, 35, 1414–1418. [Google Scholar] [CrossRef]
- Parent, O.; Ilinca, A. Anti-icing and de-icing techniques for wind turbines: Critical review. Cold Reg. Sci. Technol. 2011, 65, 88–96. [Google Scholar] [CrossRef]
- Lu, B.; Li, Y.; Wu, X.; Yang, Z. A review of recent advances in wind turbine condition monitoring and fault diagnosis. In Proceedings of the Power Electronics and Machines in Wind Applications (PEMWA), Lincoln, NM, USA, 24–26 June 2009; pp. 1–7.
- Ribrant, J. Reliability Performance and Maintenance—A Survey of Failures in Wind Power Systems. Ph.D. Thesis, KTH School of Electrical Engineering, Stockholm, Sweden, 2006. [Google Scholar]
- Fischer, K.; Besnard, F.; Bertling, L. A limited-scope reliability-centred maintenance analysis of wind turbines. In Proceedings of the European Wind Energy Conference and Exhibition EWEA 2011, Brussels, Belgium, 14–17 March 2011; pp. 89–93.
- Feng, Y.; Qiu, Y.; Crabtree, C.J.; Long, H.; Tavner, P.J. Use of SCADA and CMS signals for failure detection and diagnosis of a wind turbine gearbox. In Proceedings of the European Wind Energy Conference and Exhibition 2011, Sheffield, UK, 2011; pp. 17–19.
- Entezami, M.; Hillmansen, S.; Weston, P.; Papaelias, M. Fault detection and diagnosis within a WT mechanical braking system. In Proceedings of the International Conference on Condition Monitoring and Machinery Failure Prevention Technologies (CM 2012 and MFPT 2011), Cardiff, UK, 20–22 June 2011.
- Popa, L.M.; Jensen, B.-B.; Ritchie, E.; Boldea, I. Condition monitoring of wind generators. In Proceedings of the Industry Applications Conference (38th IAS Annual Meeting), Salt Lake City, UT, USA, 12–16 October 2003; pp. 1839–1846.
- Douglas, H.; Pillay, P.; Ziarani, A. Broken rotor bar detection in induction machines with transient operating speeds. IEEE Trans. Energy Convers. 2005, 20, 135–141. [Google Scholar] [CrossRef]
- Hansen, A.D.; Michalke, G. Fault ride-through capability of DFIG wind turbines. Renew. Energy 2007, 32, 1594–1610. [Google Scholar] [CrossRef]
- Bazeos, N.; Hatzigeorgiou, G.; Hondros, I.; Karamaneas, H.; Karabalis, D.; Beskos, D. Static, seismic and stability analyses of a prototype wind turbine steel tower. Eng. Struct. 2002, 24, 1015–1025. [Google Scholar] [CrossRef]
- Scottishpower SP Transmission Ltd. Black Law Wind Farm Extension Grid Connection Environmental Statement. Available online: http://www.spenergynetworks.co.uk/userfiles/file/Black_Law_Environmental_Statement_Windfarm_Extension_Grid_Connection.pdf (accessed on 20 July 2015).
- Van Bussel, G.; Zaaijer, M. Estimation of Turbine Reliability Figures within the DOWEC Project; DOWEC Report Nr. 10048; The Netherlands; Issue 4, October 2003. [Google Scholar]
- García, F.P.; Pedregal, D.J.; Roberts, C. Time series methods applied to failure prediction and detection. Reliab. Eng. Syst. Saf. 2010, 95, 698–703. [Google Scholar] [CrossRef]
- Márquez, F.P.; Chacón Muñoz, J.M.; Tobias, A.M. B-spline approach for failure detection and diagnosis on railway point mechanisms case study. Qual. Eng. 2015, 27, 177–185. [Google Scholar] [CrossRef]
- Tavner, P.; Qiu, Y.; Korogiannos, A.; Feng, Y. The Correlation between Wind Turbine Turbulence and Pitch Failure. In Proceedings of European Wind Energy Conference & Exhibition, Brussels, Belgium, 14–17 March 2011.
- Wu, A.P.; Chapman, P.L. Simple expressions for optimal current waveforms for permanent-magnet synchronous machine drives. IEEE Trans. Energy Conver. 2005, 20, 151–157. [Google Scholar] [CrossRef]
- Spinato, F.; Tavner, P.J.; van Bussel, G.J.W.; Koutoulakos, E. IET Reliability of WT subassemblies. Renew. Power Gener. 2009, 3, 387–401. [Google Scholar] [CrossRef]
- De la Hermosa González, R.R.; Márquez, F.P.G.; Dimlaye, V. Maintenance management of wind turbines structures via mfcs and wavelet transforms. Renew. Sustain. Energy Rev. 2015, 48, 472–482. [Google Scholar] [CrossRef]
- Marquez, F.P.G. An approach to remote condition monitoring systems management. In Proceedings of the Institution of Engineering and Technology International Conference on Railway Condition Monitoring, Birmingham, UK, 29–30 November 2006; pp. 156–160.
- Márquez, F.P.G.; Pedregal, D.J.; Roberts, C. New methods for the condition monitoring of level crossings. Int. J. Syst. Sci. 2015, 46, 878–884. [Google Scholar] [CrossRef]
- Vasquez, T. Weather Forecasting Handbook; Weather Graphics Technologies: Garland, TX, USA, 2002; ISBN 0970684029. [Google Scholar]
- Sørensen, J.D. Framework for risk-based planning of operation and maintenance for offshore wind turbines. Wind Energy 2009, 12, 493–506. [Google Scholar] [CrossRef]
- Rothkopf, M.H.; McCarron, J.K.; Fromovitz, S. A weather model for simulating offshore construction alternatives. Manag. Sci. 1974, 20, 1345–1349. [Google Scholar] [CrossRef]
- Yasseri, S.; Bahai, H.; Bazargan, H.; Aminzadeh, A. Prediction of safe sea-state using finite element method and artificial neural networks. Ocean Eng. 2010, 37, 200–207. [Google Scholar] [CrossRef]
- Härdle, W.; Horowitz, J.; Kreiss, J.P. Bootstrap methods for time series. Int. Stat. Rev. 2003, 71, 435–459. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).