1. Introduction
With the rapid development of society and the economy, higher requirements are put forward for energy use, which include more reliability, more flexibility, more efficiency, more adaptability to various actual application situations,
etc. Energy storage is a preferable way to solve the energy crisis problem and enable a sustainable energy future [
1,
2]. There are five main energy storage technologies, including storage batteries, super-capacitors, pumped storage, compressed air energy storage (CAES) and flywheel energy storage (FES) [
3,
4].
Table 1 shows a comparison between the five storage technologies [
5,
6,
7,
8]. As is seen from the Table, it is obvious that FES has the advantages of high power density, high storage density, rapid charge and discharge, easy installation and maintenance, high cyclic-life, and being environmentally friendly. Therefore, the FES has broad application prospects.
Table 1.
Comparison of five storage technologies.
Table 1.
Comparison of five storage technologies.
| Index | Super-Capacitor | CAES | Pumped Storage | Storage Battery | FES |
|---|
| Efficiency (%) | ~90 | <50 | ~60 | ~70 | ~90 |
| Storage density | High | High | - | Middle | Highest |
| Power density | High | Middle | - | Middle | Highest |
| Modularity | No | No | No | Yes | Yes |
| Service life(years) | 10 | 5 | 10 | 5 | 20 |
| Charge time unit | Hour | Hour | Hour | Hour | Minute |
| Pollution | No | Yes | Yes | Yes | No |
| Build cycle unit | Year | Year | Year | Month | Week |
In recent years, the process of application of FES has been accelerated by the development of power electronic technology, motor/generator integrated technology, control technology, bearing technology and materials technology [
9,
10,
11]. FESs are widely applied in various fields, such as power system applications, transportation applications, pulsed power applications, uninterrupted power supply (UPS) applications, space applications and military applications,
etc. As for power system applications, the FES can be used for power regulation between utilities in the power grid [
12,
13,
14,
15,
16]. For space applications, the FES can supply energy storage with the smallest mass and also can be used for attitude control for guidance of the craft [
17,
18,
19]. For UPS applications, the FES system can serve as an UPS to supply energy for vital loads, such as hospitals, central computer rooms, government agencies,
etc. [
20,
21,
22]. As for military applications, the FES system can supply short high power bursts for electromagnetic cannon [
23]. The aforementioned applications of FES show that FES plays an important role in modern industry and economy.
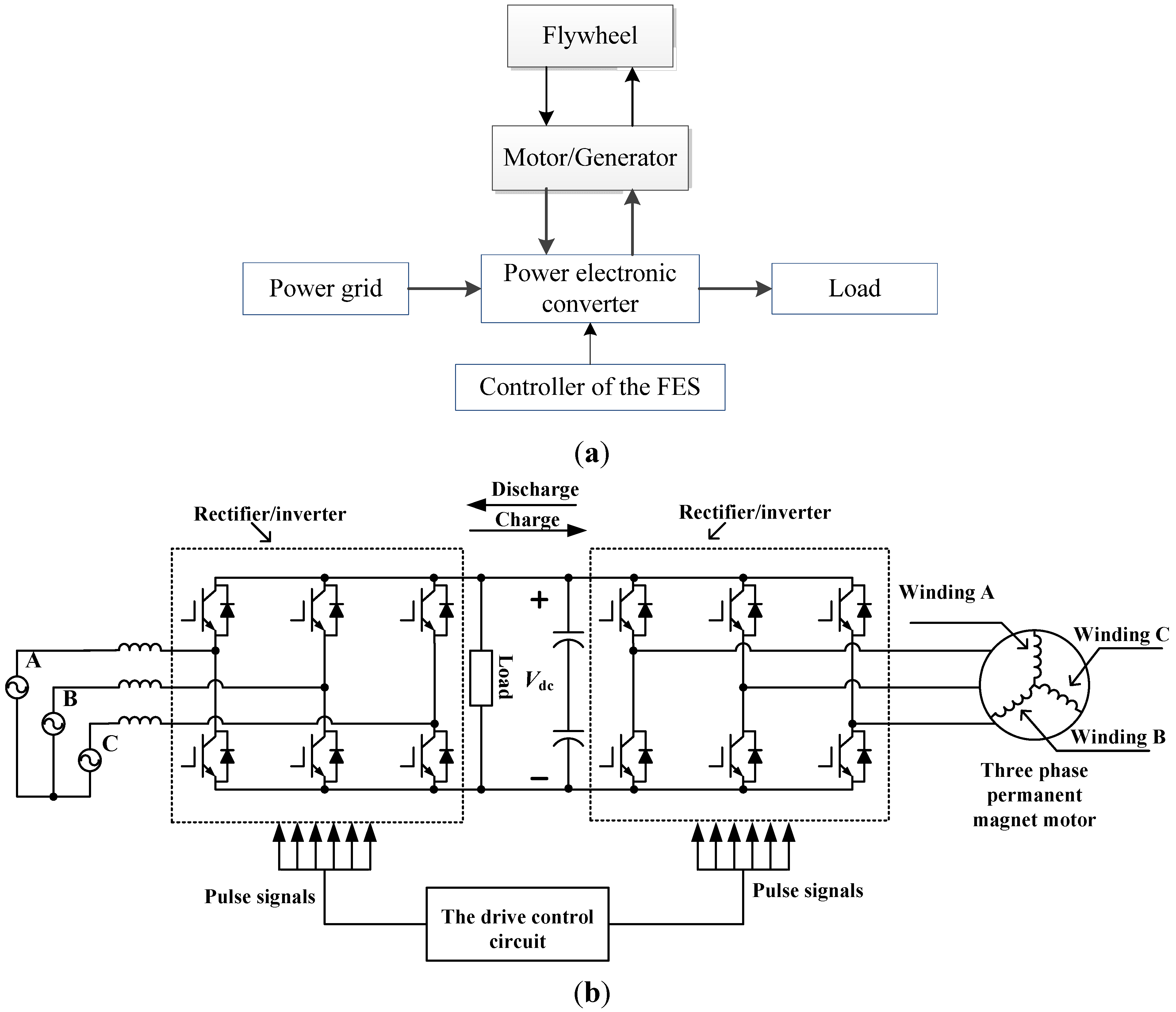
As shown in
Figure 1a, a FES system mainly consists of four parts: flywheel, motor/generator, power electronic converter and controller [
15,
17]. The flywheel is coaxially connected with the shaft of the motor/generator. When the motor/generator operates as a motor, the system is charged and electric energy is transformed into mechanical energy by the flywheel. When electric energy is needed, the motor/generator will operate as a generator and the mechanical energy stored in the flywheel will be transformed into electric energy through power electronic converter. The drive circuit is shown in
Figure 1b. As shown in this figure, the left and right rectifier/inverters that are controlled by the drive circuit controller work as rectifier and inverter, respectively, during the charging stage, and the power flows to the load and flywheel. During the discharging stage, the right rectifier/inverter works as a rectifier, while the left rectifier/inverter can work as a rectifier or an inverter depending on the load requirements. As is known, a multilevel converter can reduce the harmonics in the output voltage. Besides the converter topology shown in
Figure 1b, the circuit topologies of diode-clamped multilevel inverter, capacitor-clamped multilevel inverter and cascaded inverter can be used in a FES [
24]. Furthermore, modulation strategies, such as sinusoidal pulse-width modulation (SPWM) and space-vector modulation (SVM) can be used to obtain more sinusoidal output voltage.
The FES system stores kinetic energy when it works. The amount of stored energy
Ek is defined by the following mechanical relationship:
where
J is the inertia of the flywheel and rotor, ω is the rotational speed of flywheel or rotor. It is obvious that high rotational speed of the rotor can increase the energy density. The performance of the high speed machine has much influence on the FES system. So this paper is written from aspect of machine design.
Figure 1.
(a) System block diagram of the FES; (b) drive circuit.
Figure 1.
(a) System block diagram of the FES; (b) drive circuit.
The permanent-magnet synchronous machine (PMSM) is favorable for use as a motor/generator in FES, because the PMSM has the advantages of high efficiency, high power density and high power factor, and so on. However, a lot of attention has been focused on the loss calculation and thermal analysis of the high speed machine [
25,
26,
27,
28,
29,
30,
31,
32,
33]; in [
25,
26,
27], a calculation method for the harmonic iron loss based on the combination of 2D and 3D FEMs is proposed; the iron loss and copper loss of a high speed PMSM that can operate at a speed of 60,000 rpm are analyzed and calculated in [
28]; in [
29], a fast hybrid method considering the factors of end effect and pulse-width modulation harmonics is proposed to calculate the iron loss; loss and thermal characteristics of a high speed PMSM based on the FEM are analyzed in [
30,
31,
32]; in [
33], a combined network and computational fluid dynamic (CFD) method is used for the thermal analysis. However, considering that the high speed machine used for FES system should start easily and run stably, the machine should have good torque performance. In addition, considering that FES system should have low iron loss at no load, air-gap magnetic field harmonics, which can be reflected by the back electromotive force (EMF) harmonics, will cause high losses in the stator core, rotor core and permanent magnets at high speed [
34,
35,
36,
37]. Furthermore, when the FES works under discharging or charging conditions, the back EMF waveform must also be closer to a sine wave and have as few harmonics as possible. Thus the torque performance and the back EMF have received much attention in this paper. The rotor structure can influence the back EMF and torque performance of a high speed machine. Ref. [
28] adopted surface PMs while ref. [
27] adopted interior PMs. This paper will compare the surface PMs with interior PMs from aspects of torque performance and back EMF harmonics. Numerous methods have been researched for reducing cogging torque, torque ripple and back EMF harmonics to optimize the design of PMSMs [
38,
39,
40,
41,
42,
43,
44,
45,
46,
47,
48,
49,
50,
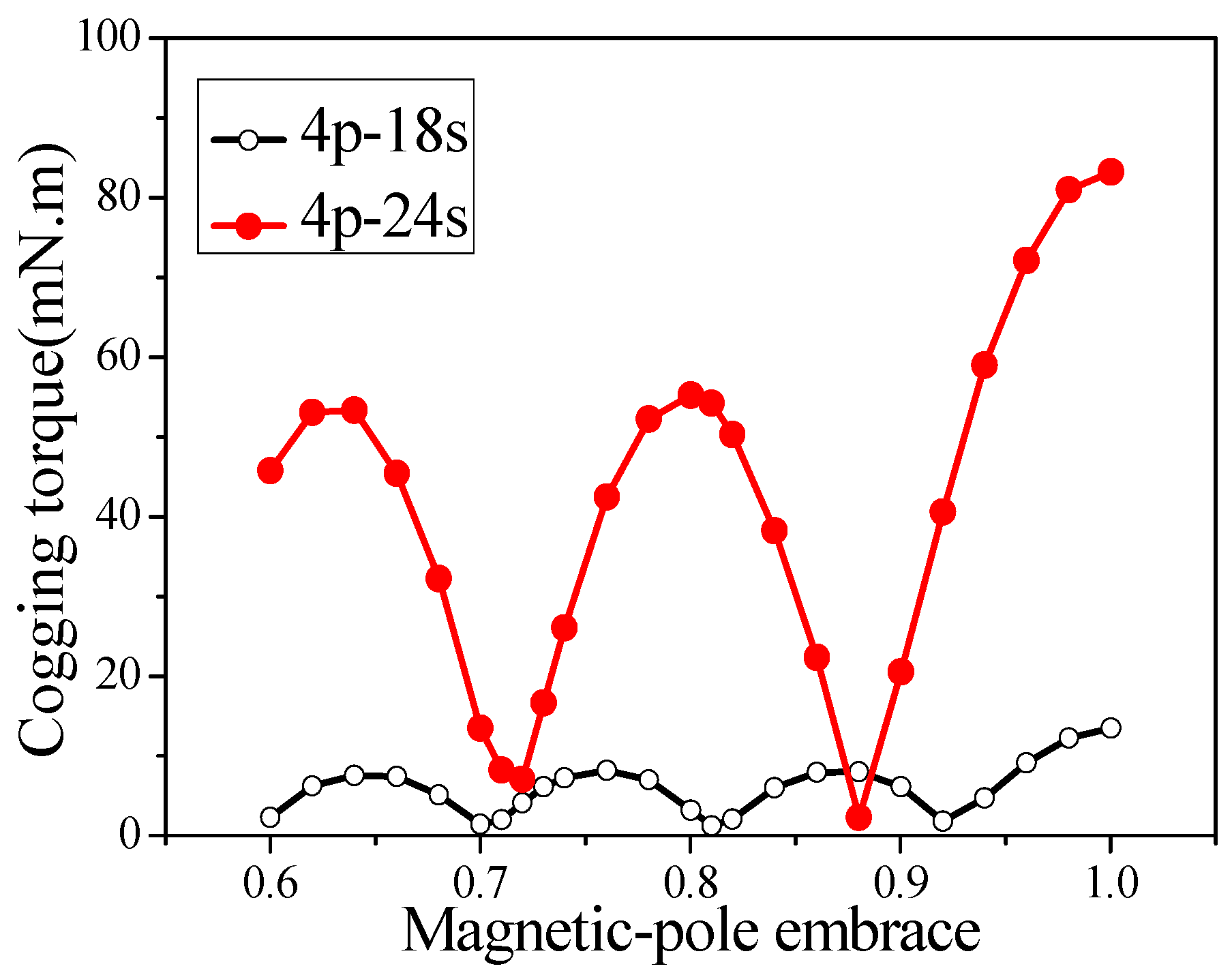
51]. A fractional number of slots per pole is an effective method. The larger the least common multiple of slots and poles is, the smaller the cogging torque is [
38,
39]. However, these works don’t consider the influence on the back EMF when the pole number is eight or above. In a high speed machine, a large pole number will cause high iron losses, so this paper focuses on the selection of slot number considering both torque performance and back EMF when the pole number has a constant value of four. The skewing can also effectively reduce both cogging torque and back EMF harmonics. The skewing can be designed at the stator, rotor or magnet [
40,
41]. However, compared with other methods, skewing has high manufacturing technology requirements, which will consequently increase the manufacturing cost. In addition, magnet shape has great influence on the torque performance and back EMF. Adopting a proper magnetic-pole embrace, cogging torque can reach zero in theory for surface machines and the back EMF harmonics can also be decreased. Bread-shape and stacked PMs are adopted to decrease the torque ripple in [
42], but the torque ripple has been reduced at the expense of high manufacturing cost and the stacked PMs have the risk of falling off when the machine runs at high speed. Ref. [
43] and ref. [
44] only considered the back EFM wave, while ref. [
45] only considered the cogging torque reduction. Ref. [
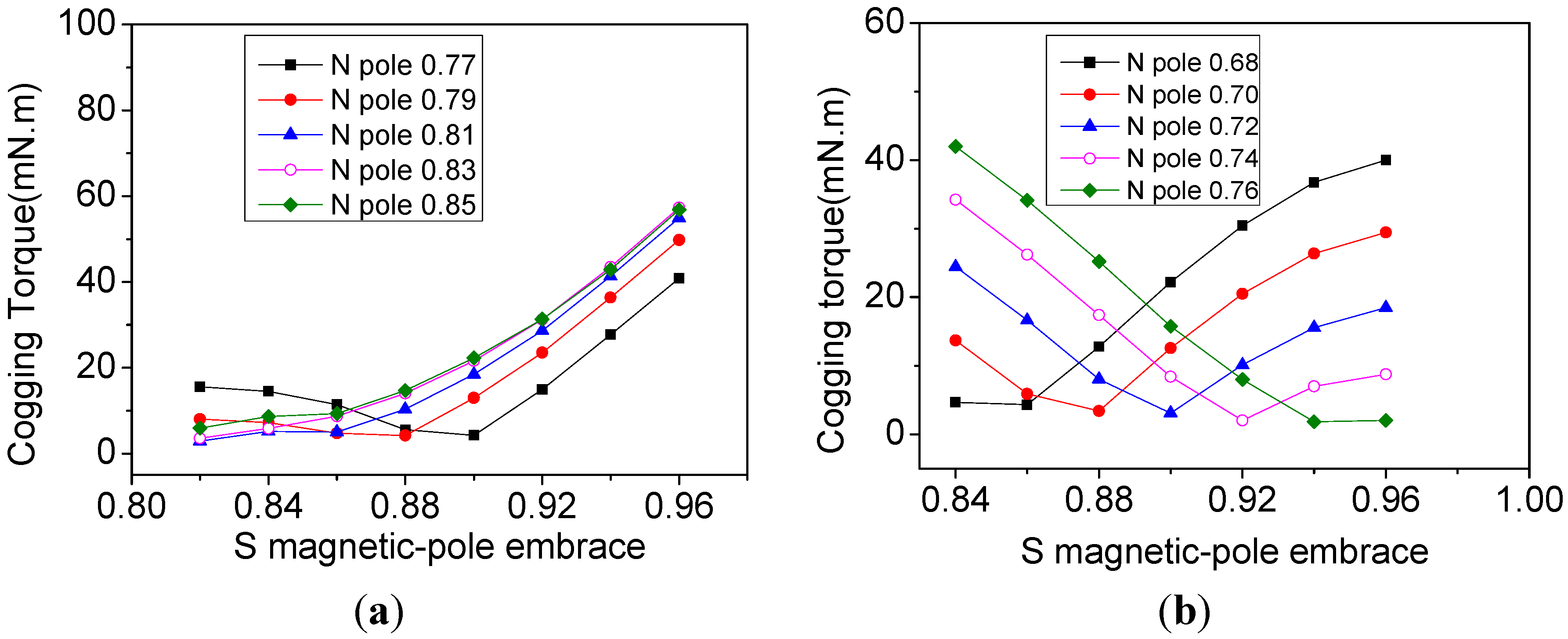
46] optimized the torque performance considering both magnetic-pole embrace and magnetic bridge width, and the magnetic-pole embrace of all poles is the same. This paper considers both torque performance and the back EMF during optimization. The N poles and S poles of the high speed machine that are set with different magnetic-pole embrace values will be researched. Sometimes the stator structure, such as teeth shape, is also optimized to minimize the cogging torque [
47,
48]. Besides, calculated optimization methods have attracted much attention in recent years. In [
49], a genetic algorithm is used to optimize the discrete skew angle of PMs to reduce cogging torque based on 3D FEM. However, this work just optimized one parameter that has an influence on the torque performance and there are no experiments to verify the optimization result. In [
50], three motor parameters are optimized at the same time to reduce the cogging torque by the non-dominated sorting genetic algorithm, but the optimization step length of each parameter is very small, which requires a large calculation time. The most important point is that it is impossible for a motor designer to use a complicated and time-consuming algorithm during the practical motor design. The Taguchi method [
51,
52] is a less time-consuming and multi-parameter method. Ref. [
52] performed a robust design of EMF to reduce the effect caused by the manufacturing tolerances, and width, thickness and residual of PM are selected as the noise variables. In this paper, the magnetic-pole eccentricity, the slot opening, the thickness of PM and the length of air gap are optimized by using the Taguchi method for machine design. The tradeoff between back EMF and torque performance is considered. Experiments are conducted to verify the calculated results. This paper can provide useful references for a high speed machine designer.
This paper almost considers most of the factors that have an influence on the torque and back EMF performance. Meanwhile, a simple and effective optimization method, such as magnetic-pole embrace, is used for preliminary optimization, and a less time-consuming and multi-parameter method is adopted for further optimization. Sine-wave current is adopted to decrease the torque ripple and the harmonics of the back EMF wave. This paper is organized as follows: a rotor structure for the high speed machine is selected and the initial machine parameters are obtained in
Section 2; based on the initial scheme, comprehensive analysis and optimizations are carried out by selecting an optimal slot/pole combination and magnetic-pole embrace with the finite element method (FEM) in
Section 3; partial parameters, such as the magnetic-pole eccentricity, the slot opening, the thickness of PM and the length of air gap, are also optimized by using the Taguchi method in
Section 4; a prototype high speed PMSM was manufactured and tested to validate the simulation results in
Section 5.
2. Selection of Rotor Structure
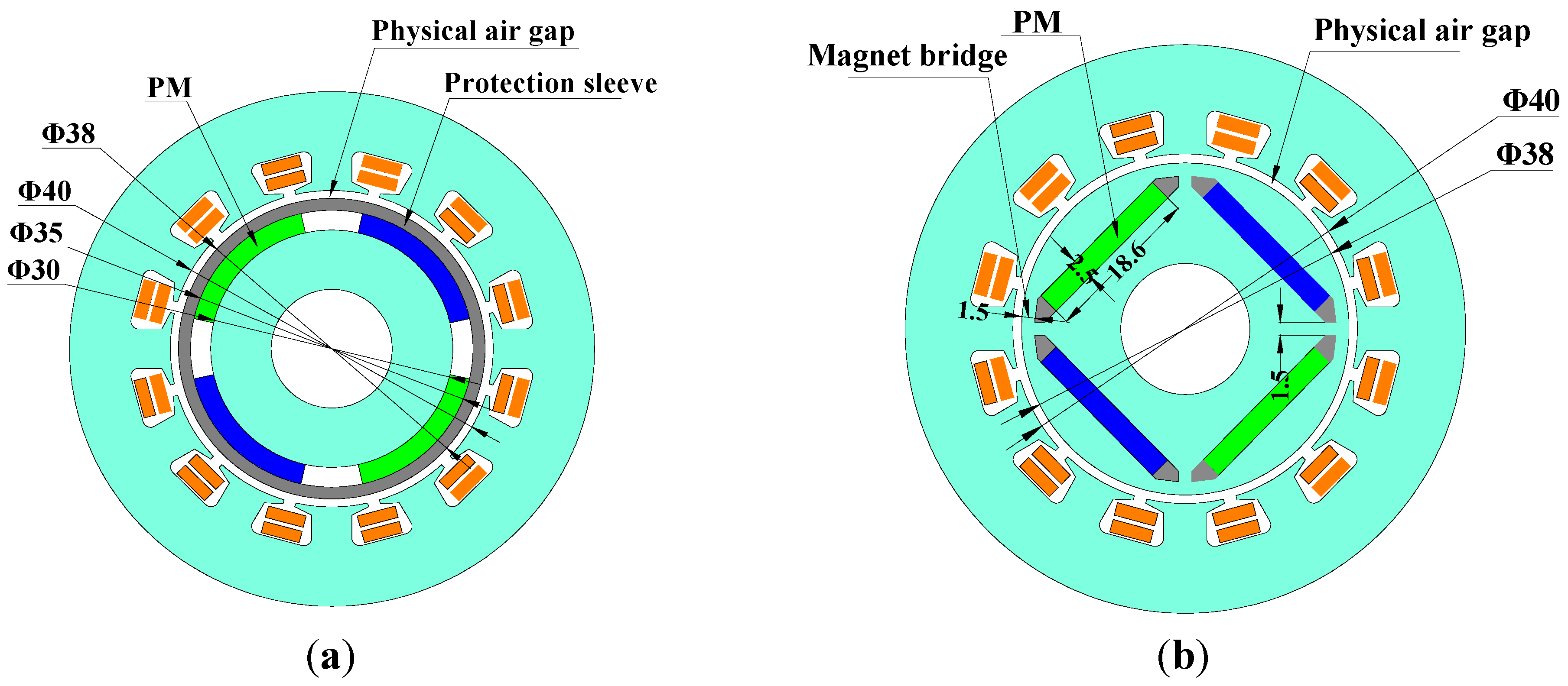
Both of the rotors with surface PMs (SPMs) and interior PMs (IPMs) can be used in high speed PMSMs. Both structures both adopt 12 slots-4 poles and the same stator parameters. Their rotor structures are different, but with the same volume of magnet materials, as shown in
Figure 2.
Figure 2.
Dimensions of the two rotors: (a) SPM and (b) IPM.
Figure 2.
Dimensions of the two rotors: (a) SPM and (b) IPM.
As for surface PMSM, a non-magnetic protection sleeve is usually adopted to protect the PMs from the high centrifugal force. In this paper, the total equivalent air gap length of the surface PMSM is 2.5 mm which includes the thickness of the protection sleeve (1.5 mm) and the physical air gap length (1 mm). Compared with the surface PMSM, the equivalent air gap length of an interior PMSM can be decreased to 1 mm without the protection sleeve. Besides, the magnetic bridge thickness of the interior PMSM is set to 1.5 mm to ensure the same mechanical strength as the surface PMSM. The PM width and PM thickness of the interior PMSM are 18.6 and 2.5 mm, respectively.
The surface PMSM and interior PMSM are compared by the finite element method (FEM), and the results are summarized in
Table 2. It can be seen that although the interior PMSM has a smaller equivalent air gap length and the contribution of reluctance torque, it has lower average torque (
Tav). In addition, the interior PMSM has higher cogging torque (
Tcog), higher torque ripple (
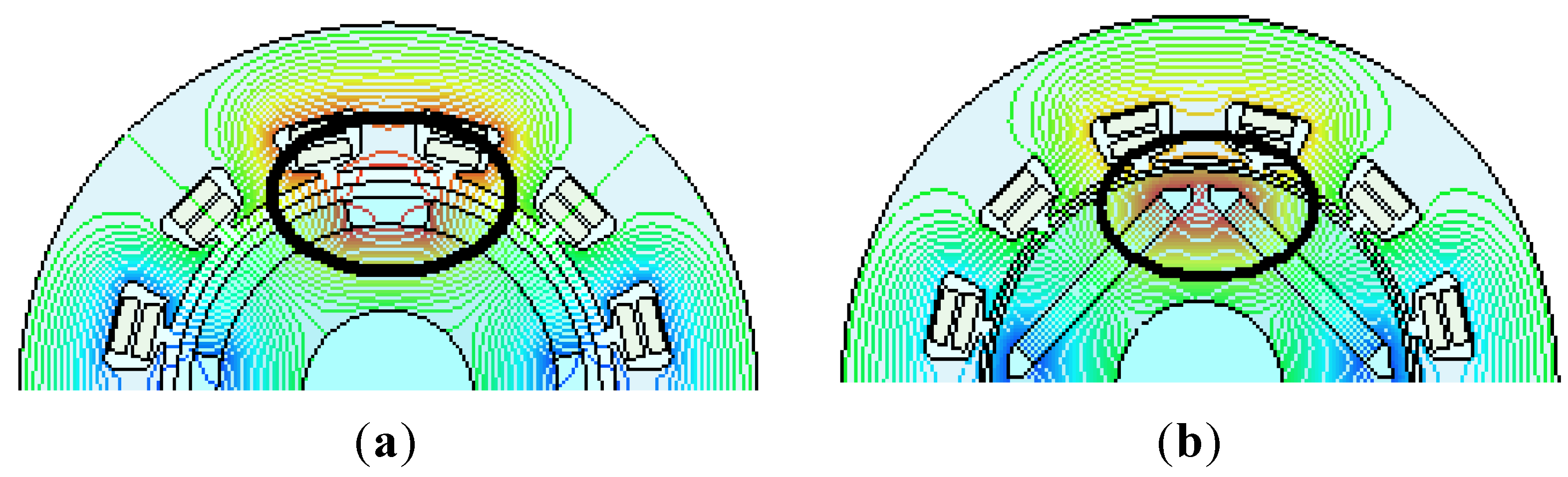
Trip) and higher total harmonics distortions (THD) than the surface PMSM. This is because the magnetic flux leakage (leakage coefficient of 1.6) of the interior PMSM is much higher than that of surface PMSM (leakage coefficient of 1.13) due to the large magnetic bridge thickness, as shown in
Figure 3. Thus, the rotor structure with surface PMs is chosen for further research. The initial parameters of the PMSM with SPM rotor are listed in
Table 3.
Table 2.
Performances Comparison of IPM and SPM machines.
Table 2.
Performances Comparison of IPM and SPM machines.
| Structures | Tav | Trip | Tcog | THD |
|---|
| IPM | 385 mN·m | 6.60% | 27.6 mN·m | 11.50% |
| SPM | 387 mN·m | 3.20% | 21.4 mN·m | 7.30% |
Figure 3.
Flux line distribution of the two structures: (a) SPM and (b) IPM.
Figure 3.
Flux line distribution of the two structures: (a) SPM and (b) IPM.
Table 3.
Initial parameters of the machine.
Table 3.
Initial parameters of the machine.
| Parameters | Value | Parameters | Value |
|---|
| Magnet material | NTP42UH | Magnet remanence (20 °C) (T) | 1.299 |
| Pole number | 4 | Rated speed (rpm) | 30000 |
| Rated power (kW) | 1 | Conductor per slot | 24 |
| Length of core (mm) | 80 | Outer diameter of rotor (mm) | 35 |
| Outer diameter of stator (mm) | 65 | Inner diameter of rotor (mm) | 15 |
| Inner diameter of stator (mm) | 40 | Magnetic-pole embrace | 0.73 |
| Thickness of magnet (mm) | 2.5 | Magnetic-pole eccentricity (mm) | 0 |
| Thickness of protection sleeve (mm) | 1.5 | Slot opening (mm) | 1.5 |
| Current density (A/mm2) | 6.4 | Air gap length (mm) | 1 |
| Linear current density (A/cm) | 50 | Average air-gap flux density (T) | 0.636 |
4. Performance Optimization with the Taguchi Method
As is known, a high frequency of the fundamental and especially the harmonic magnetic field in a high speed machine will cause high losses in stator core, rotor core and permanent magnets. Considering that the back EMF waveform is the reflection of the magnetic field distribution, the THD of back EMF is studied. After the optimization in
Section 3, the machine has good torque characteristics with an average torque of 445 mN·m and a torque ripple of 0.19%. However, the THD of back EMF is 9.72%, which is still high and will cause high losses. Thus a further THD optimization is needed based on the scheme obtained in
Section 3.
In traditional methods, if there are N variables influencing EMF harmonics, average torque and the cogging torque, it is hard to take them into consideration together because of the complicated combinations. Here we give an example: if each variable has three levels of setting, there may be 3N design variations (N is the number of the variable) in the traditional method. The Taguchi method is a design optimization method. It can simplify the design process, reduce the calculation times, and provide a systematic and efficient approach to determine the optimum settings of multiple design parameters.
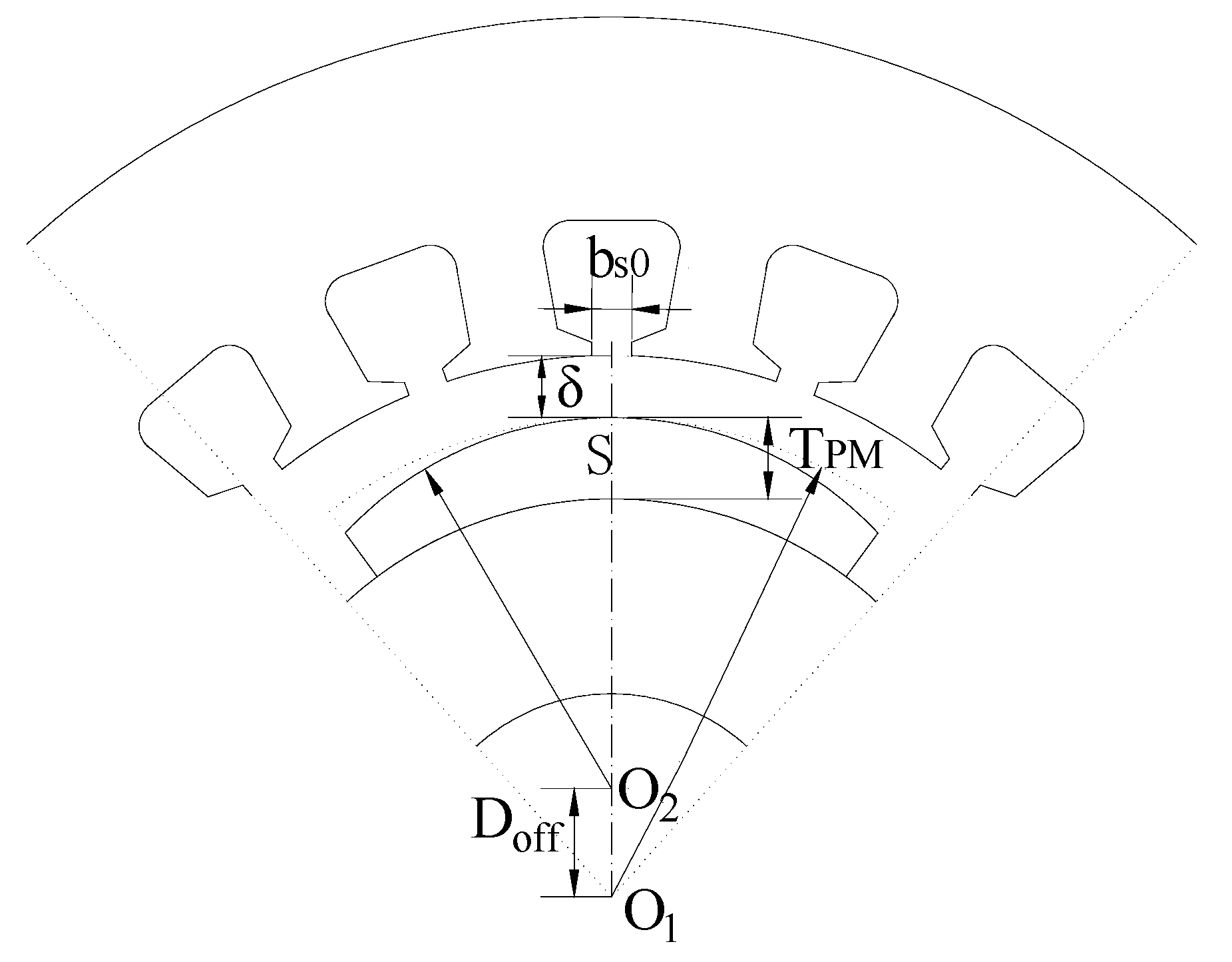
As shown in
Figure 8, there are four main factors influencing the back EMF and torque characteristic: the magnetic-pole eccentricity (
Doff), the slot opening (
bs0), the thickness of PM (
TPM) and the equivalent length of air gap (δ). The
Doff is obtained by fixing
O1 and moving
O2. The minimum air gap is unchanged as
Doff varying. The base value of the four factors are
Doff = 0,
bs0 = 1.5 mm,
TPM = 2.5 mm, δ = 2.5 mm, respectively. They will be optimized with the Taguchi method.
Figure 8.
Four parameters to be optimized: Doff, bs0, TPM, δ.
Figure 8.
Four parameters to be optimized: Doff, bs0, TPM, δ.
4.1. Optimization with Taguchi Method
There are three stages to perform the Taguchi method: (1) First of all, four factors A, B, C and D corresponding to
Doff,
bs0,
TPM and δ are selected, the different levels of all factors are shown in
Table 8; (2) Secondly, as shown in
Table 9, the four factors at three levels are combined based on the orthogonal array (a standard OA L
9), which is the most efficient orthogonal design.
Table 8.
Levels of design variables.
Table 8.
Levels of design variables.
| Design Variable (mm) | Level 1 | Level 2 | Level 3 |
|---|
| A: Doff | 0 | 2 | 4 |
| B: bs0 | 1.0 | 1.5 | 2 |
| C: TPM | 2 | 2.5 | 3 |
| D: δ | 2.3 | 2.5 | 2.7 |
Table 9.
Results of nine models.
Table 9.
Results of nine models.
| No. | A | B | C | D | Tcog (mN·m) | Trip | Tav (mN·m) | THD |
|---|
| 1 | 0 | 1.0 | 2 | 2.3 | 1.4 | 0.28% | 429.0 | 10.4% |
| 2 | 0 | 1.5 | 2.5 | 2.5 | 1.1 | 0.19% | 445.0 | 9.72% |
| 3 | 0 | 2.0 | 3 | 2.7 | 2.1 | 0.25% | 450.7 | 9.01% |
| 4 | 2 | 1.0 | 2.5 | 2.7 | 0.6 | 0.18% | 406.2 | 6.52% |
| 5 | 2 | 1.5 | 3 | 2.3 | 2 | 0.28% | 481.0 | 7.05% |
| 6 | 2 | 2.0 | 2 | 2.5 | 1.2 | 0.29% | 375.5 | 6.41% |
| 7 | 4 | 1.0 | 3 | 2.5 | 0.6 | 0.25% | 437.1 | 3.47% |
| 8 | 4 | 1.5 | 2 | 2.7 | 0.1 | 0.28% | 331.3 | 1.48% |
| 9 | 4 | 2.0 | 2.5 | 2.3 | 0.6 | 0.31% | 415.4 | 2.94% |
The corresponding results of torque characteristics and the THD of back EMF for each combination scheme are calculated with FEM and also listed in
Table 9; (3) Finally, the calculated results in
Table 9 are analyzed through analysis of means (ANOM) and analysis of variance (ANOVA) to obtain optimal setting of parameters [
54], which will be carried out in the following part.
4.2. Analysis of Results
4.2.1. Analysis of Means (ANOM)
ANOM is carried out to determine the best level combination to achieve optimal performance. From
Table 9, it can be seen that all the cogging torque and torque ripple are very small, which can meet the requirements. Thus, the value of THD of back EMF and average torque will be emphatically analyzed in this part. The means of all results can be calculated as:
When the average effect of a design variable at one setting is considered, the average value of the design variable for one level of the setting factor can be calculated. For example, the average THD of setting factor B at level 2 (
bs0 = 1.5 mm), which is only at No. 2, 5 and 8 in
Table 9, is calculated as:
Average THD and average torque for all levels of all factors can be obtained in a similar way. The THD and average torque result data, which is called the main factor effects, are listed in
Table 10 and
Table 11, respectively. As shown in
Table 10 and
Table 11, it is clear that the factor-level combination of A3-B2-C1-D3 (
Doff = 4 mm,
bs0 = 1.5 mm,
TPM = 2 mm, δ = 2.7 mm) contributes to the minimization of THD, and the factor-level combination of A1-B1-C3-D1 (
Doff = 0 mm,
bs0 = 1.0 mm,
TPM = 3 mm, δ = 2.3 mm) contributes to the maximization of average torque. In order to determine the factors that have significant effects on the machine performance, a mathematical method called ANOVA is used in the following section to obtain the ultimate optimal scheme for the high speed PMSM.
Table 10.
THD for all levels of all factors.
Table 10.
THD for all levels of all factors.
| Setting Factors | Ai | Bi | Ci | Di |
|---|
| i = 1 | 9.70% | 6.80% | 6.09% | 6.79% |
| i = 2 | 6.70% | 6.08% | 6.39% | 6.53% |
| i = 3 | 2.60% | 6.12% | 6.51% | 5.67% |
Table 11.
Average torque for all levels of all factors.
Table 11.
Average torque for all levels of all factors.
| Setting Factors | Ai | Bi | Ci | Di |
|---|
| i = 1 | 441.6 | 424.1 | 378.6 | 441.8 |
| i = 2 | 421 | 419.1 | 422.2 | 419.2 |
| i = 3 | 394.6 | 413.9 | 456.3 | 396.1 |
4.2.2. Analysis of Variance
ANOVA does not analyze the results directly, but rather determines the relative importance of various design variables. In order to perform ANOVA, the sum of squares (SS), which is calculated based on the data of ANOM, should be obtained firstly. The SS for factor B can be calculated as:
SS
F for A, C and D are obtained in the similar way. All the SS data for THD and average torque are summarized in
Table 12. The effect ratio for each variable is calculated and also summarized in
Table 12.
Table 12.
Effects of various factors on machine performance indexes.
Table 12.
Effects of various factors on machine performance indexes.
| Factors | THD | Average Torque |
|---|
| SSF | Factor Effect Ratio | SSF | Factor Effect Ratio |
|---|
| A | 76.2 | 95.8% | 3330.4 | 21.2% |
| B | 1 | 1.2% | 156.1 | 1% |
| C | 0.3 | 0.4% | 9101.1 | 57.9% |
| D | 2.1 | 2.6% | 3132.9 | 19.9% |
| Total | 79.6 | 100% | 15720.5 | 100% |
As shown in
Table 12, the factors A (
Doff) and B (
bs0) have larger effects on THD than average torque, while the factor C (
TPM) and the factor D (δ) have larger effects on average torque than THD. Thus, based on the selected combination A3-B2-C1-D3 for THD and combination A1-B1-C3-D1 for average torque, the best combination of A3-B2-C3-D1 (
Doff = 4 mm,
bs0 = 1.5 mm,
TPM = 3 mm, δ = 2.3 mm) is obtained to reduce the THD and increase the average torque as much as possible.
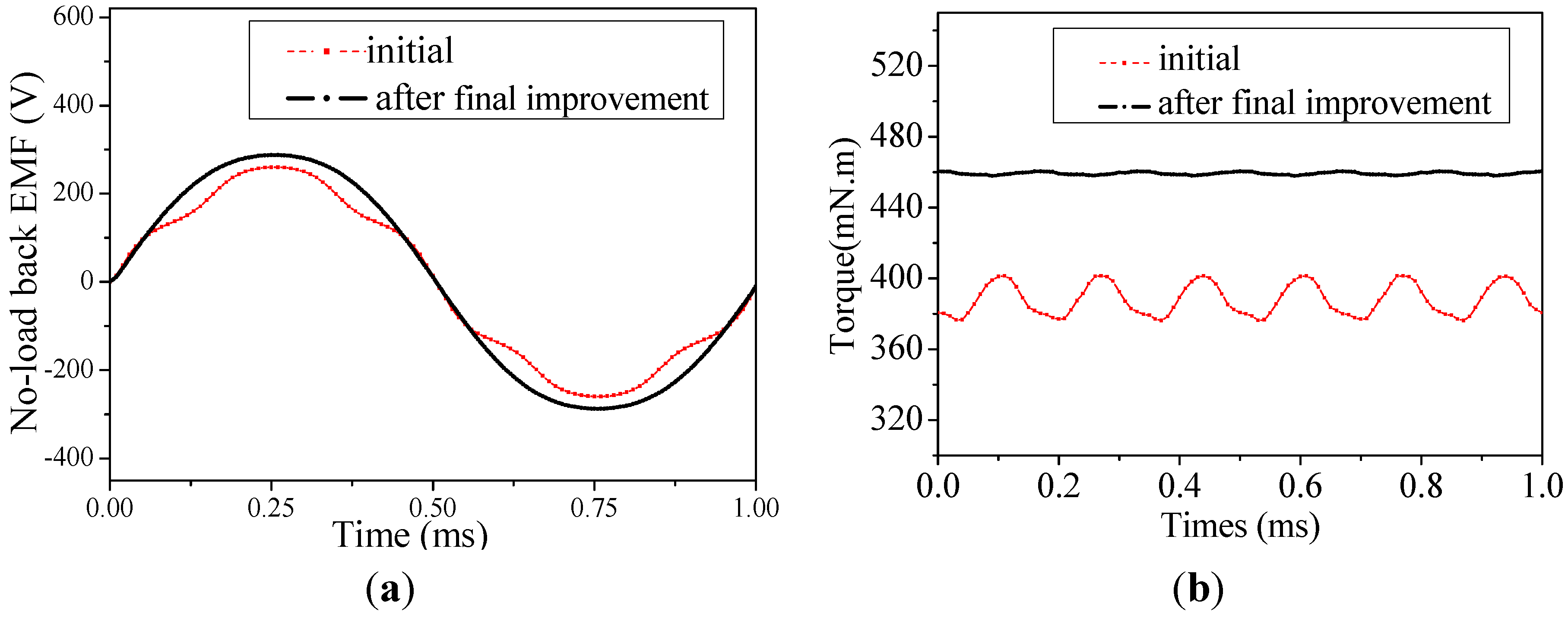
The performances of the initial and the final schemes are compared in
Figure 9 and
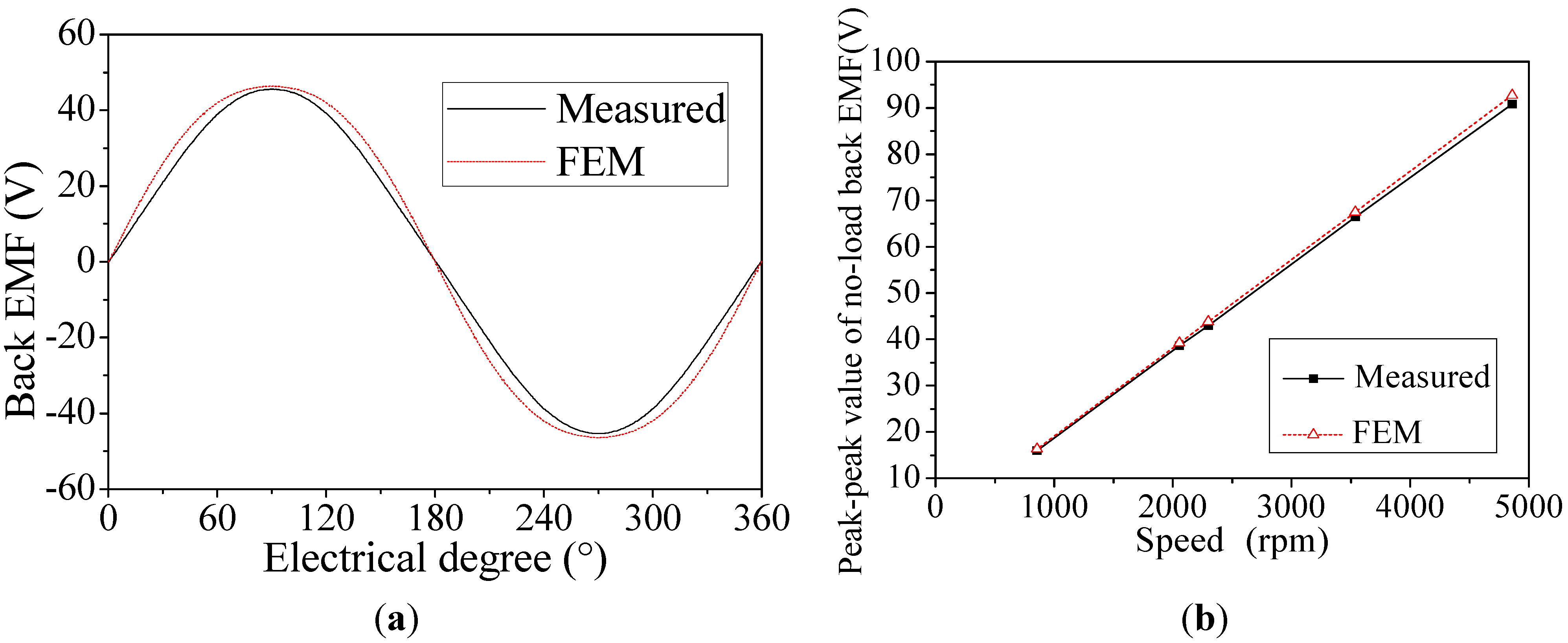
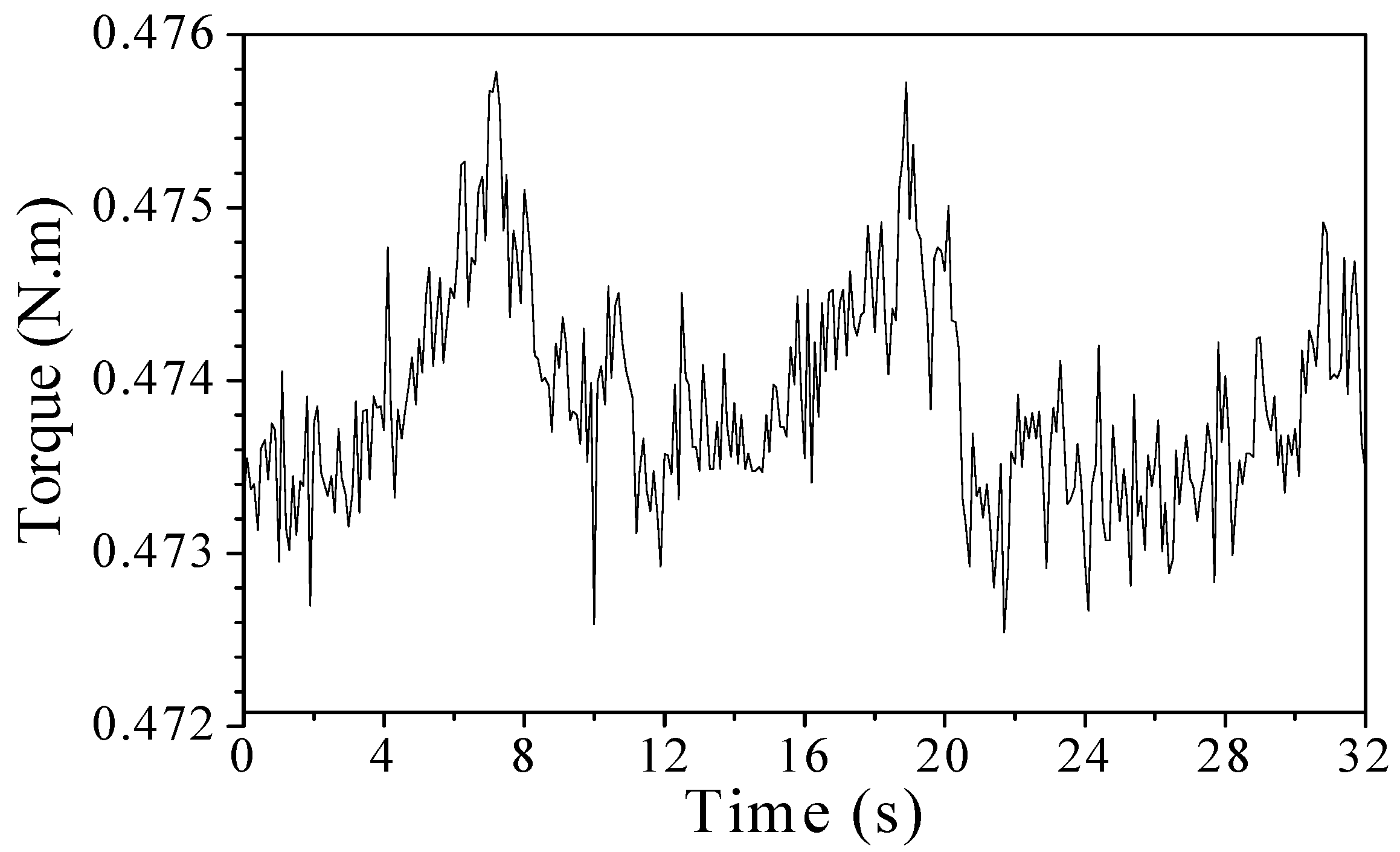
Table 13. After the final improvement, THD of the back EMF waveform decreases from 7.30% to 3.20% (by 50.3%), while cogging torque decreases from 21.36 to 1.04 mN·m (by 95.1%) and torque ripple decreases from 3.63% to 0.29% (by 90.9%). Meanwhile, the average torque increases from 387 to 459.2 mN·m (by 17.9%). It is validated that the electromagnetic performances of the machine are effectively improved. Furthermore, the rated
q-axis reactance (
Xq = 3.3938 Ω) and the rated
d-axis reactance (
Xd = 3.4263 Ω) are obtained using methods of back EMF by the FEM [
55].
Figure 9.
Comparison of electromagnetic performance of before and after optimization: (a) no-load back EMF waveform; (b) torque waveform.
Figure 9.
Comparison of electromagnetic performance of before and after optimization: (a) no-load back EMF waveform; (b) torque waveform.
Table 13.
Comparison results.
Table 13.
Comparison results.
| Performances | Initial | Final | Increasing Rate |
|---|
| Tav (mN·m) | 387 | 456.3 | 17.9% |
| THD of back EMF | 7.30% | 3.63% | −50.3% |
| Tcog (mN·m) | 21.36 | 1.04 | −95.1% |
| Trip | 3.20% | 0.29% | −90.9% |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}