In these sections the storage elements are represented by Plenums. In all the cases presented in this section the isobaric flow from the orifice to the state L is considered, which is a reasonable assumption for large values of .
5.1. Restriction Example
A simple case consisting of serially connected “Ambient-Restriction-Plenum-Restriction-Ambient” (A1-R1-P1-R2-A2) is analysed (
Figure 2a) in this section. The geometrical parameters were selected in such a way as to construct a demanding test for the stability of the computational procedure: R1 features a large and R2 a small cross-section, resulting in a small pressure difference between A1 and P1. P1 additionally features a relatively small volume. The geometrical parameters are: plenum volume,
= 1 L; cross-sectional area of R1,
= 60 cm
2; and cross-sectional area R2,
= 0.1 cm
2. The analysed configuration could mimic the discretisation of the intake manifold into multiple plenums, where the corresponding plenum is placed in front of the nearly closed throttle represented by R2. The restrictions thus represent the connections between the plenums representing the different storage parts of the intake manifold. Therefore, they can also feature a finite length. Pure air is considered as the working medium. The boundary conditions in A1 are
pA1 = 130 kPa,
TA1 = 330 K, and in A2 they are
pA2 = 100 kPa,
TA2 = 330 K. The initial condition in P1 at
t0 = 0 s are
pP1 = 100 kPa,
TP1 = 330 K and the mass flow in both restrictions is set to zero at
t0 = 0 s. The stability analysis of this example is given in
Appendix A. The mass flow (and the related Mach number) through R1 and pressure in P1 are shown in
Figure 3 and
Figure 4, since these parameters most clearly demonstrate the stability issues associated with this example.
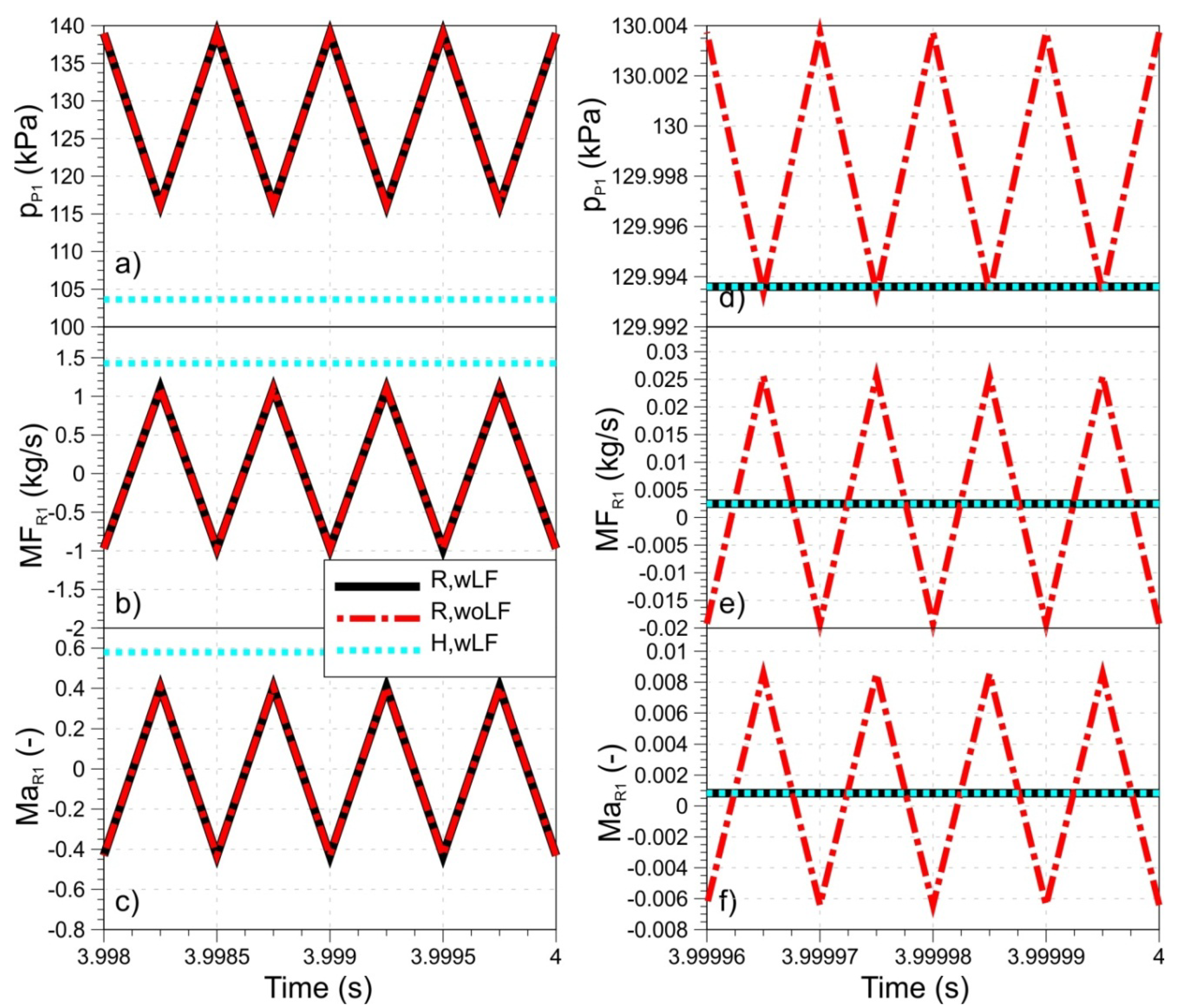
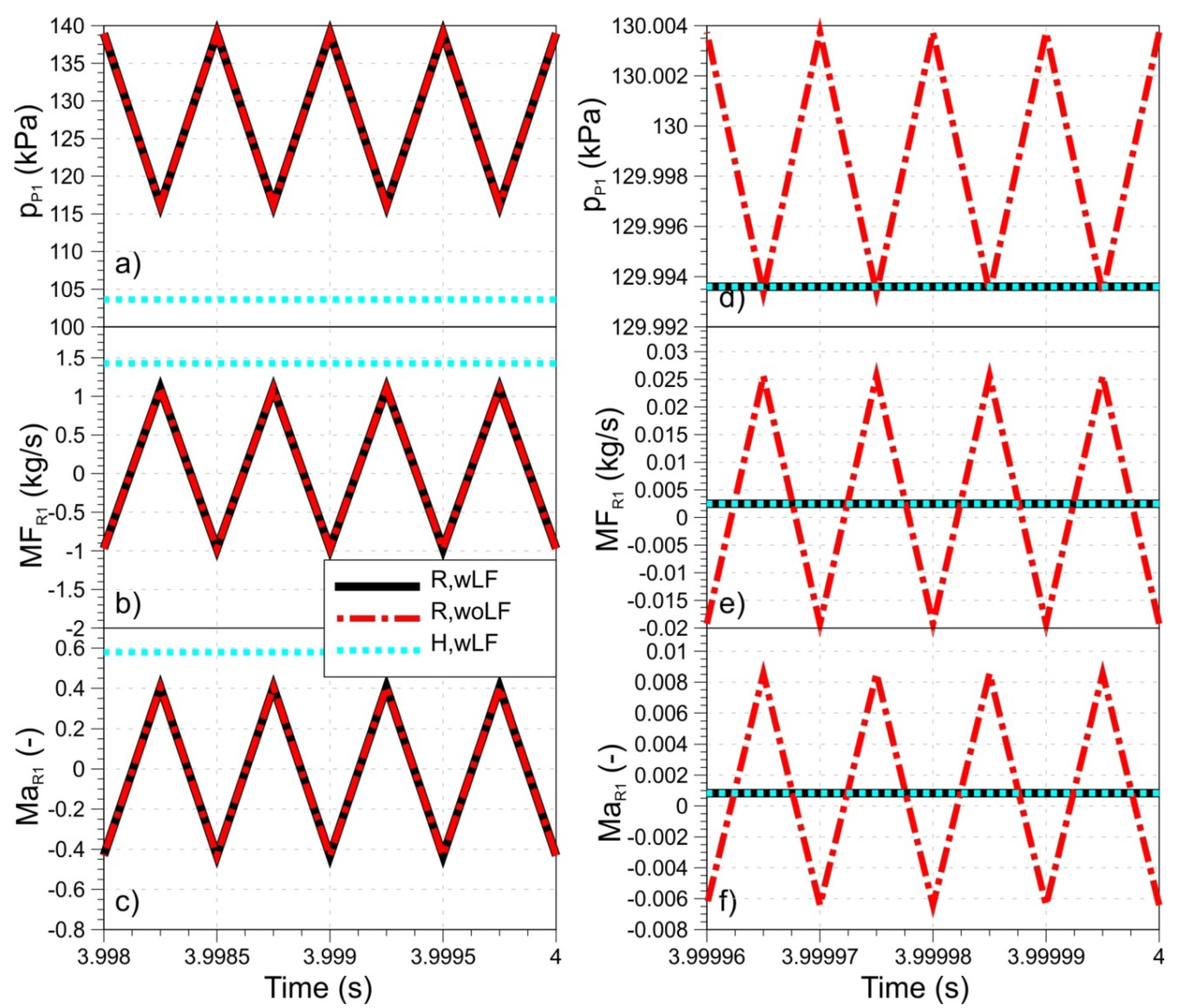
Figure 3 shows the pressure in P1 and the mass flow and the Mach number through the R1 for the time step of 0.25 ms (
Figure 3a–c) and the time step of 0.005 ms (
Figure 3d–f) after 4 s to ensure that converged results are analysed. In
Figure 3 and
Figure 4 the data are always shown for eight integration steps before
t = 4 s for both integration schemes,
i.e., Ralston (denoted R) and Heun (denoted H). For the scheme R the results are shown for the case where laminar flow conditions are assumed for very small pressure ratios [Equation (23); denoted wLF] and for the case where they are not considered (denoted woLF), whereas for the H scheme only the case wLF is considered. The results are only shown for the end integration steps and not for the intermediate steps.
Figure 2.
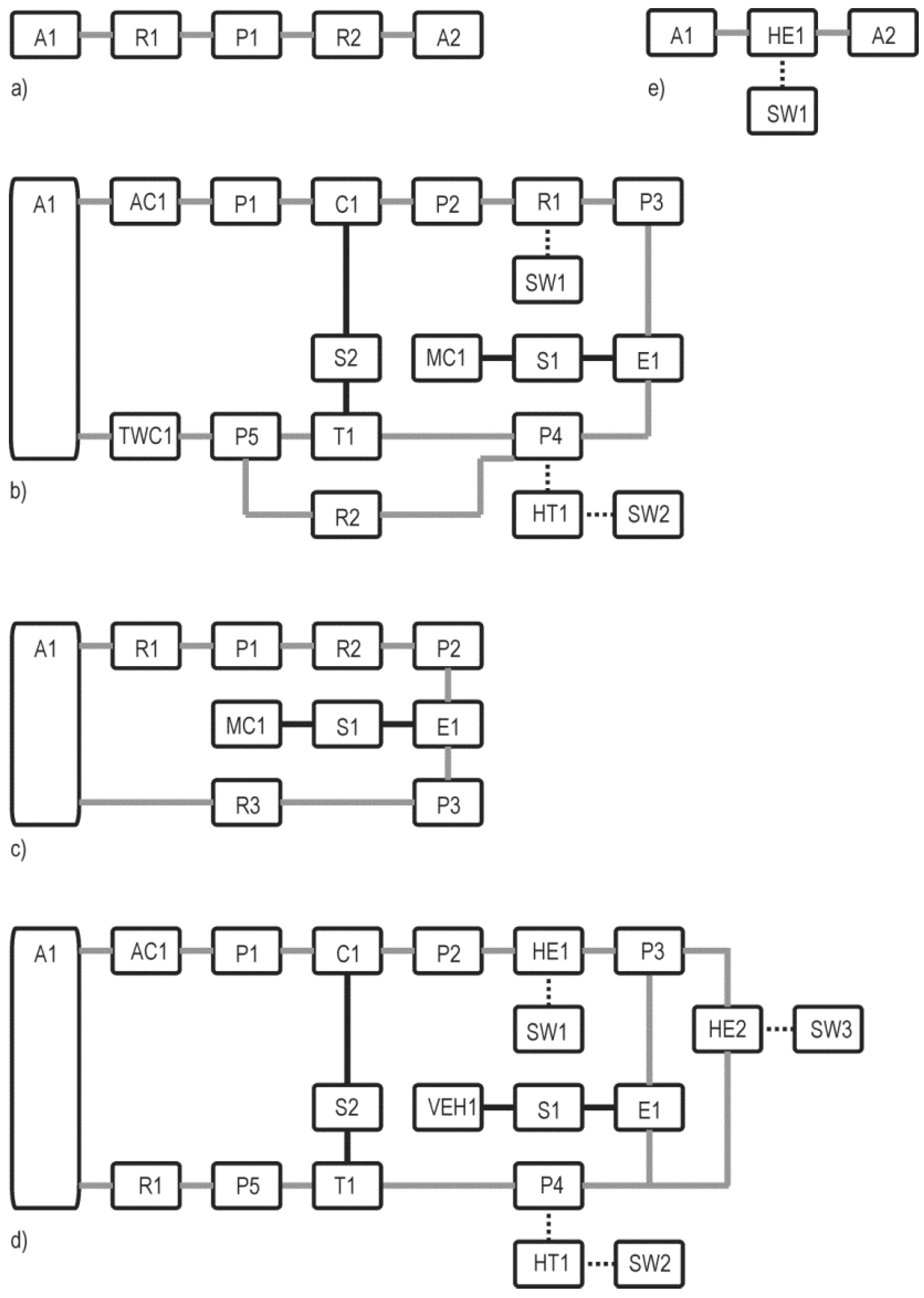
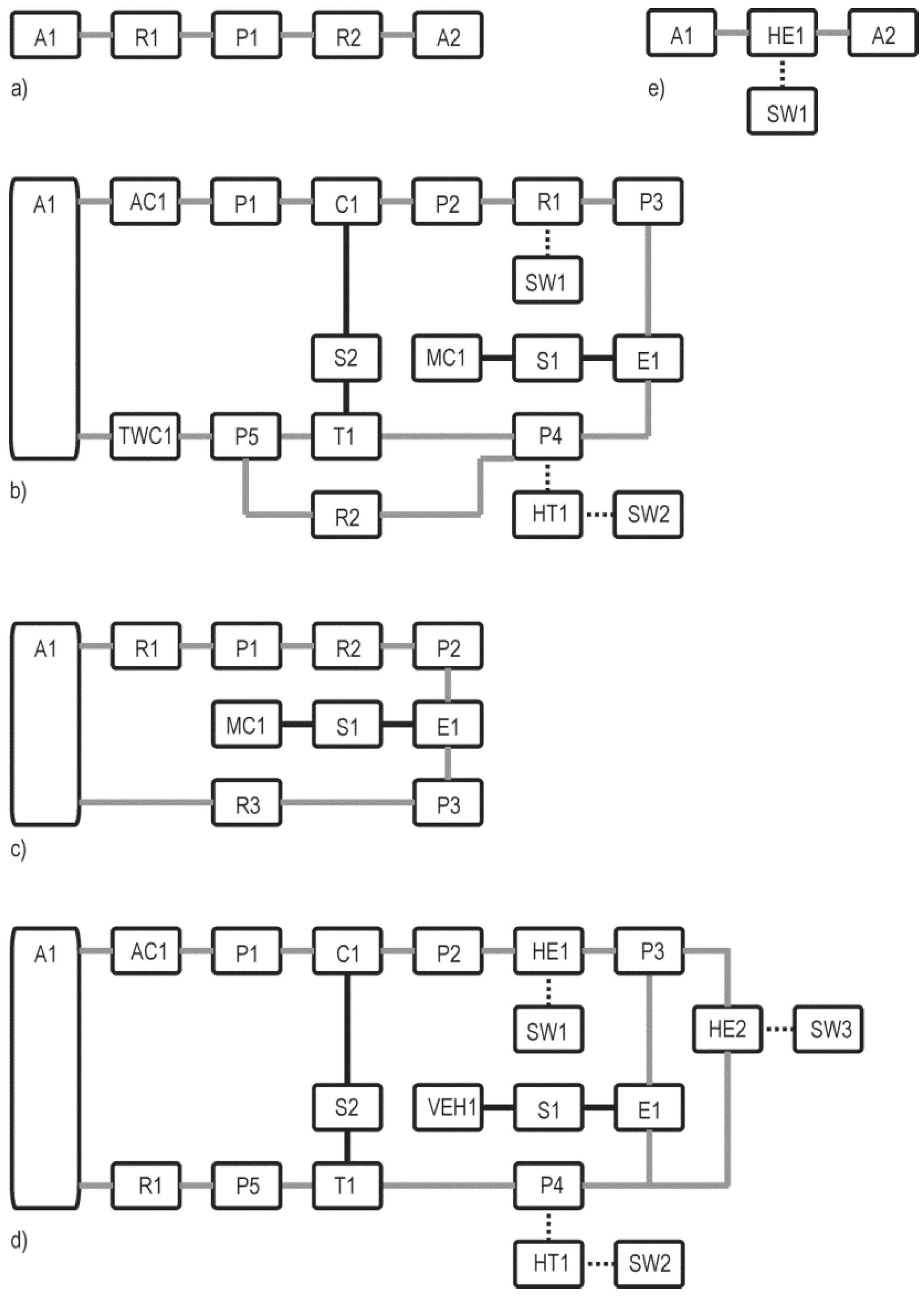
Topologies of: (a) the serially connected A1-R1-P1-R2-A2 (A-Ambient, R-Restriction, P-Plenum); (b) the 1.6 l turbocharged direct-injection spark-ignition engine equipped with the throttle valve (R1) and the turbine waste-gate valve (R2) (AC-Air Cleaner, E-Engine Block, MC-Mechanical Consumer, S-Shaft, TWC-Three Way Catalytic converter); (c) the naturally aspired 1.6 l spark-ignition engine equipped with the throttle valve (R2); (d) the 1.4 l turbocharged, intercooled diesel engine with cooled external EGR (HE2) and variable turbine geometry (VEH-Vehicle); and (e) the serially connected gas path A1-HE1-A2 (HE-Heat Exchanger) with attached SW1 (SW-solid wall). Grey connections denote exchange of the fluid, black dotted connections denote heat transfer and black connections denote the exchange of mechanical energy.
Figure 2.
Topologies of: (a) the serially connected A1-R1-P1-R2-A2 (A-Ambient, R-Restriction, P-Plenum); (b) the 1.6 l turbocharged direct-injection spark-ignition engine equipped with the throttle valve (R1) and the turbine waste-gate valve (R2) (AC-Air Cleaner, E-Engine Block, MC-Mechanical Consumer, S-Shaft, TWC-Three Way Catalytic converter); (c) the naturally aspired 1.6 l spark-ignition engine equipped with the throttle valve (R2); (d) the 1.4 l turbocharged, intercooled diesel engine with cooled external EGR (HE2) and variable turbine geometry (VEH-Vehicle); and (e) the serially connected gas path A1-HE1-A2 (HE-Heat Exchanger) with attached SW1 (SW-solid wall). Grey connections denote exchange of the fluid, black dotted connections denote heat transfer and black connections denote the exchange of mechanical energy.
The results in
Figure 3 are calculated without considering the TMB,
i.e., by applying Equation (16). In
Figure 3a–c large oscillations in all the variables are observed for the R scheme when applying the time step of 0.25 ms. Severe oscillations of the parameters originate from the interacting effects of the geometrical parameters, large time steps and the quasi-steady flow model of the restrictions,
i.e., inertial effects arising from the time variation of the mass flow are not considered in the transfer elements. This leads to stiff systems, as indicated by the very large value of the stiffness ratio that is evaluated in
Appendix A. As a result, oscillations of the Mach number with amplitude up to 0.8 are observed between the end time steps,
i.e., within 0.25 ms, which is not physically meaningful. As the system exhibits oscillatory behaviour if a time step of 0.25 ms is used, there are no differences in the results between the cases wLF and woLF ([7] and
Section 2.2). This is because the pressure oscillations in all the calculated steps are larger than the pressure threshold for entering the laminar flow calculations [
= 0.98—Equation (22)] and thus the laminar-flow-calculation region is not entered. Unlike the R scheme, the H scheme does not feature oscillatory behaviour for this numerically unstable case, but the values for the end time steps are very far from the numerically converged solution, which is shown in
Figure 4c,d or also in
Figure 3d–f for the cases wLF.
Figure 3.
A1-R1-P1-R2-A2: pressure in P1 and the mass flow and the Mach number through the R1 for the time step 0.25 ms (a, b and c) and time step 0.005 ms (d, e and f). Results are calculated without considering the TMB for Ralston (R) and Heun (H) scheme. Results with (wLF) and without (woLF) assumed laminar flow conditions for very small pressure ratios are compared.
Figure 3.
A1-R1-P1-R2-A2: pressure in P1 and the mass flow and the Mach number through the R1 for the time step 0.25 ms (a, b and c) and time step 0.005 ms (d, e and f). Results are calculated without considering the TMB for Ralston (R) and Heun (H) scheme. Results with (wLF) and without (woLF) assumed laminar flow conditions for very small pressure ratios are compared.
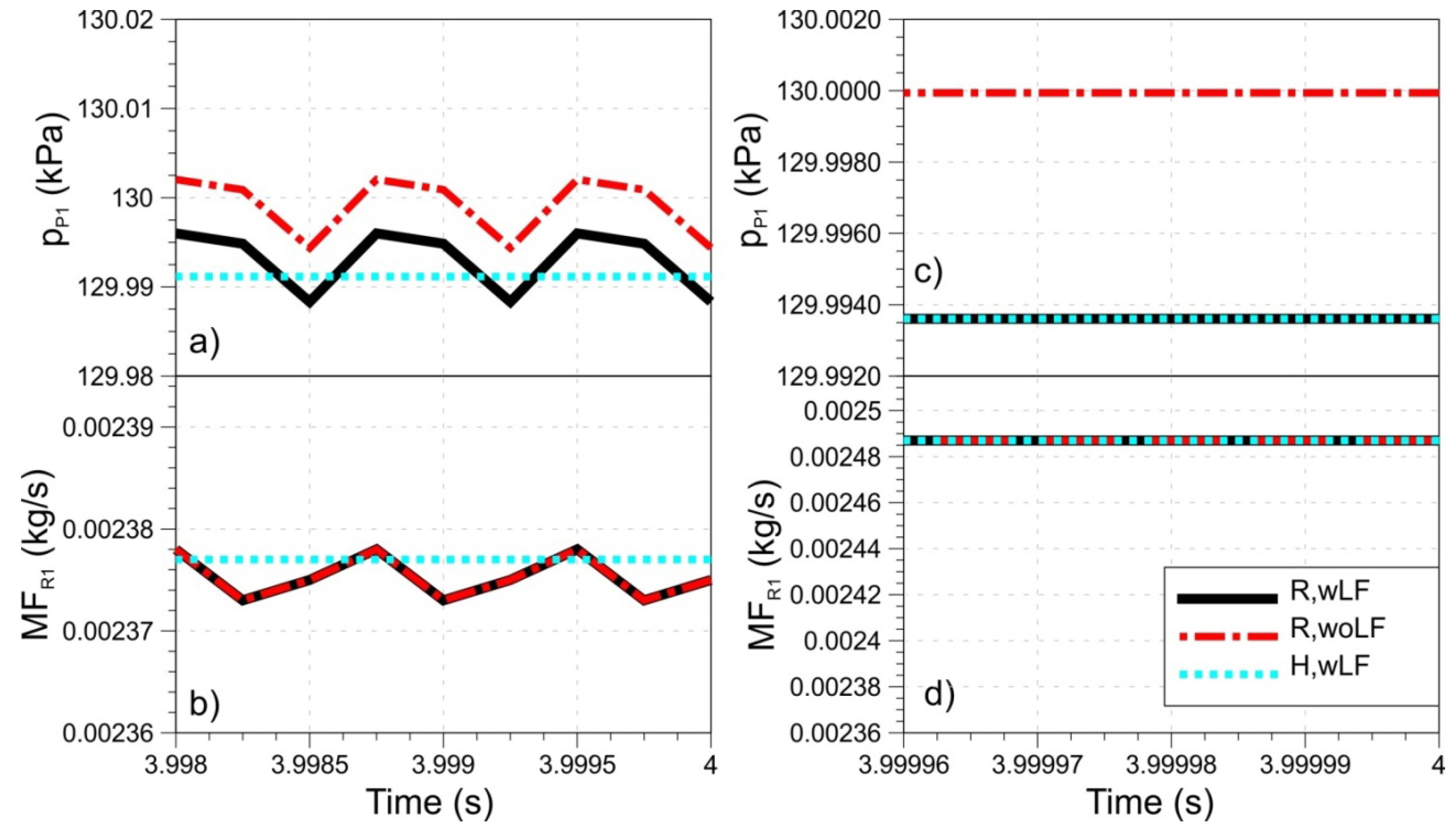
Figure 4.
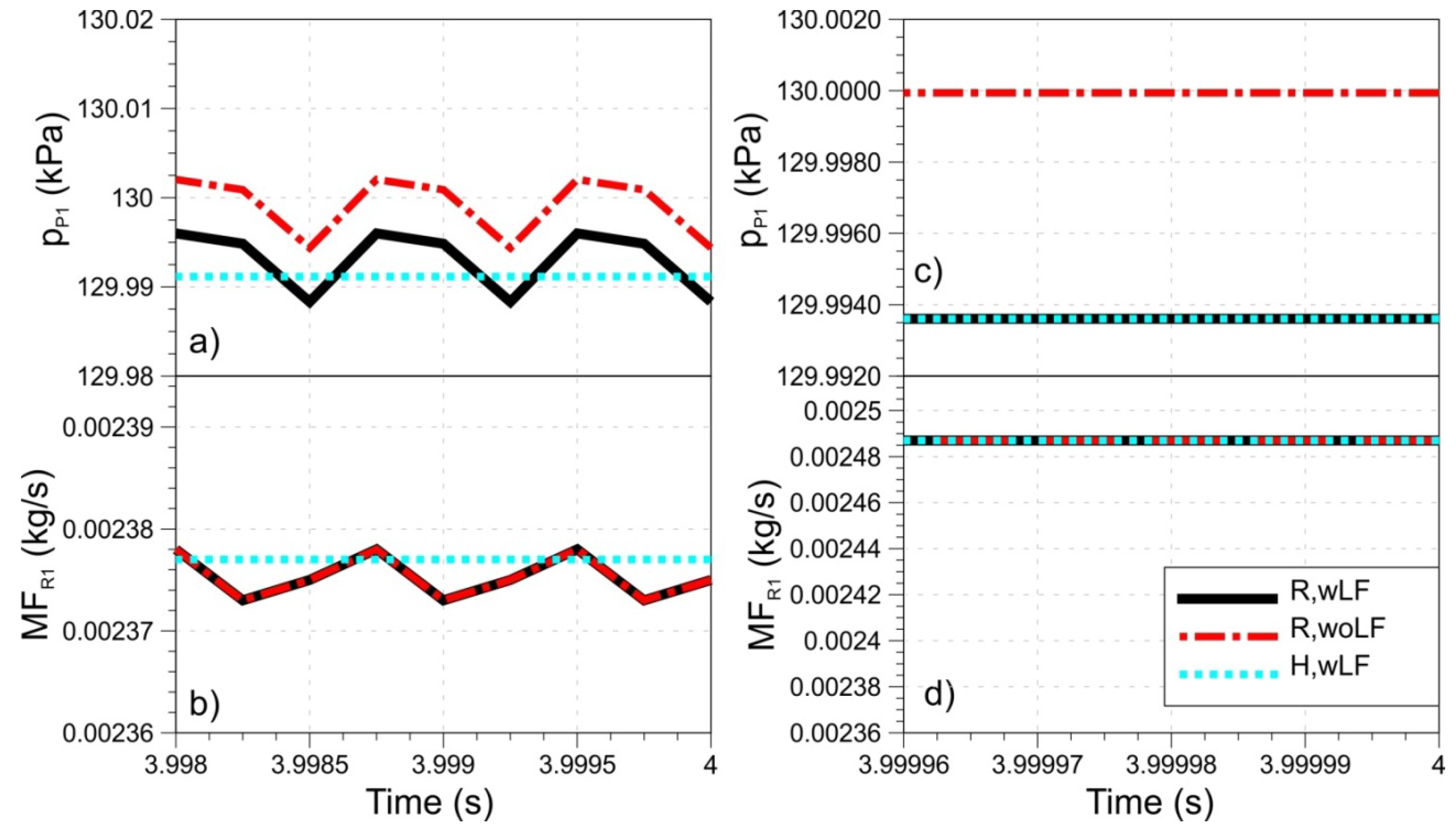
A1-R1-P1-R2-A2: pressure in P1 and mass flow through R1 for the time step 0.25 ms (a and b) and time step 0.005 ms (c and d). Results are calculated considering the TMB for Ralston (R) and Heun (H) scheme. Results with (wLF) and without (woLF) assumed laminar flow conditions for very small pressure ratios are compared.
Figure 4.
A1-R1-P1-R2-A2: pressure in P1 and mass flow through R1 for the time step 0.25 ms (a and b) and time step 0.005 ms (c and d). Results are calculated considering the TMB for Ralston (R) and Heun (H) scheme. Results with (wLF) and without (woLF) assumed laminar flow conditions for very small pressure ratios are compared.
With the time step reduced to 0.005 ms it is clear that the quality of the results has improved significantly for the case wLF as the stability of the system is enhanced under these conditions.
Figure 3d–f show that for both integration schemes all the results are stable and identical for the case wLF. However, the maximum time step that still provides oscillation-free results is 0.05 ms for the R scheme, which does not comply with the realtime constraint. For the case woLF and the integration time step 0.005 ms oscillations of the pressure in the P1 are still observed; however, their amplitudes decrease with the decreasing time step, as discernible from the comparison of
Figure 3a,d. Although the value of the pressure in P1 is very close to the correct value for the case woLF (
Figure 3d) and the pressure oscillations in P1 are very small, it is clear that the pressure in P1 still features values that are higher than the upstream pressure in A1 for particular integration steps. This causes problems of flow reversals through the R1, which is shown in
Figure 3e,f for the case woLF. Unphysical backflows between plenums with different species concentrations can cause problems when the flow signal from such a restriction is used as a controller input to steer, for example, the fuelling, since the mass-flow signal can be wrong even after filtering.
Figure 4 shows the results for the same configuration with the considered TMB. To ensure the same flow characteristics for the restriction as those shown in
Figure 3, the flow through the restriction is modelled by Equation (32). The length of the restriction is generally not given; therefore, it is assumed that the length of the gas column (
L) is equal to three hydraulic diameters of the cross-sectional area of the restriction.
Figure 4 shows the pressure in P1 and the mass flow through R1 for the time step 0.25 ms (
Figure 4a,b) and time step 0.005 ms (
Figure 4c,d).
The stability analysis presented in
Appendix A indicates that the addition of the gas columns with relatively short lengths can significantly reduce the stiffness of the system within the modelling framework applied in this paper. Therefore, unlike for the case without the TMB, no mass-flow reversals are observed in
Figure 4b for a large integration time step of 0.25 ms. It is discernible that the pressure in P1 still reaches values that are higher than the upstream pressure in A1 for the scheme R and the case woLF. However, due to the consideration of the flow history and due to the consideration of the inertial effects arising from the time variation of the mass flow, pressure overshoots do not result in mass-flow reversals but only in a variation of the slope of the mass-flow trace [Equation (32)]. Variations of the slope of the mass-flow trace are also observed for the R scheme and consideration of wLF. It is clear that the mass flows coincide well for scheme R and the cases wLF and woLF, whereas a slightly smaller pressure in P1 is predicted in the case R,wLF. The trend observed with the R scheme is correct, as in the case wLF laminar flow conditions were assumed for the pressure ratios larger than
= 0.98 [Equation (22)] and thus a slightly larger pressure drop is needed to drive similar mass flow as in the case woLF (more details are given in [
7]). In addition, it can be observed that both schemes R and H yield similar results for this integration increment. It is also discernible from the figure that for the integration time step of 0.005 ms the results are fully stable and that there are absolutely no oscillations of the mass flow through R1 and of the pressure in P1 for all the solution methods. Again, the same difference in pressure P1 is observed for the cases wLF and woLF due to the modified flow characteristics of the inflow boundary. These results clearly indicate that consideration of the TMB significantly contributes to the stability of the simulation system, which is particularly pronounced for larger integration time steps. This conclusion is also confirmed by the stability analysis presented in
Appendix A.
It is also meaningful to analyse the first part of the transient after time
t0 = 0 s for the same configuration,
i.e.,
Figure 2a, and the same boundary and initial conditions.
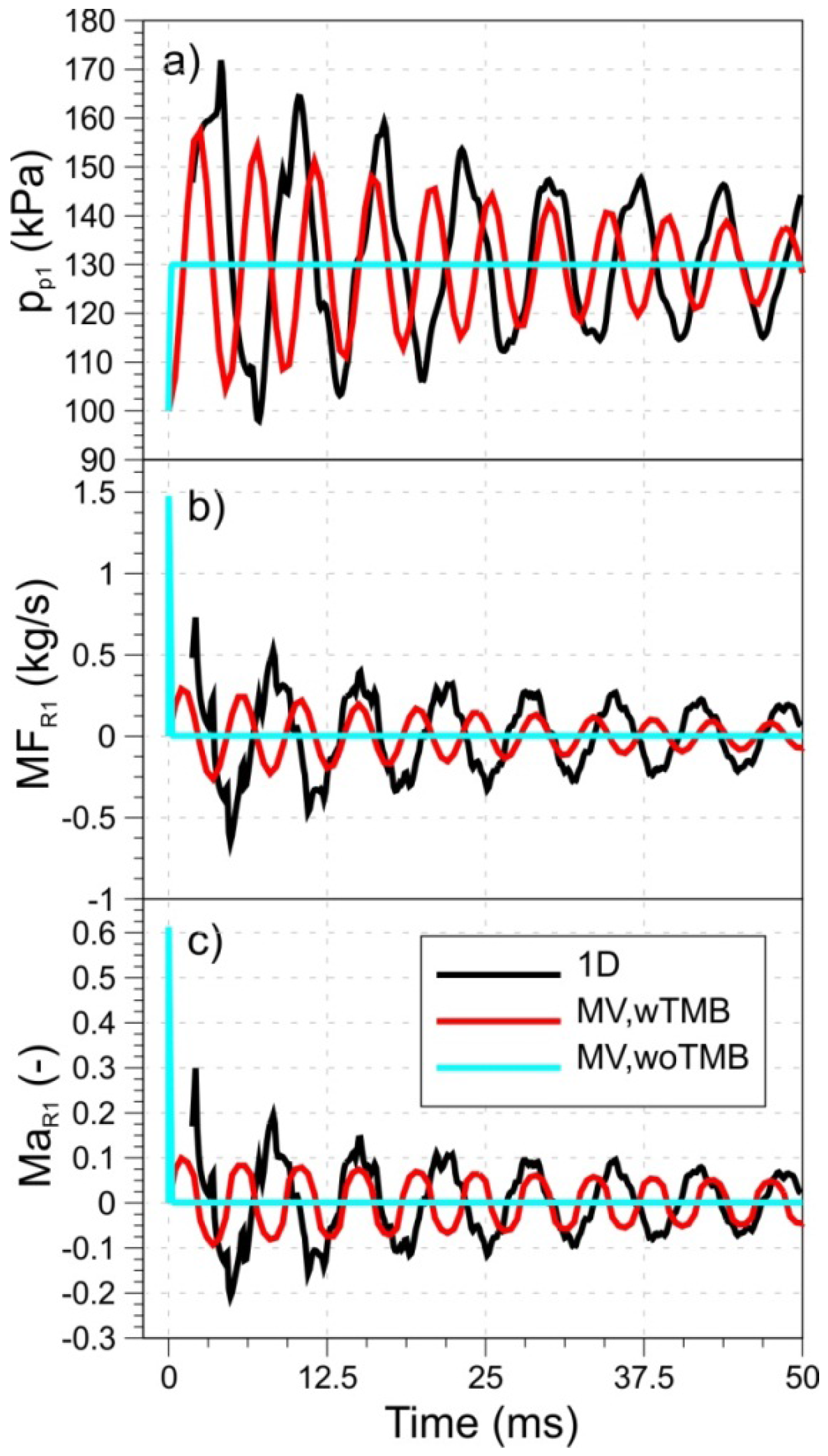
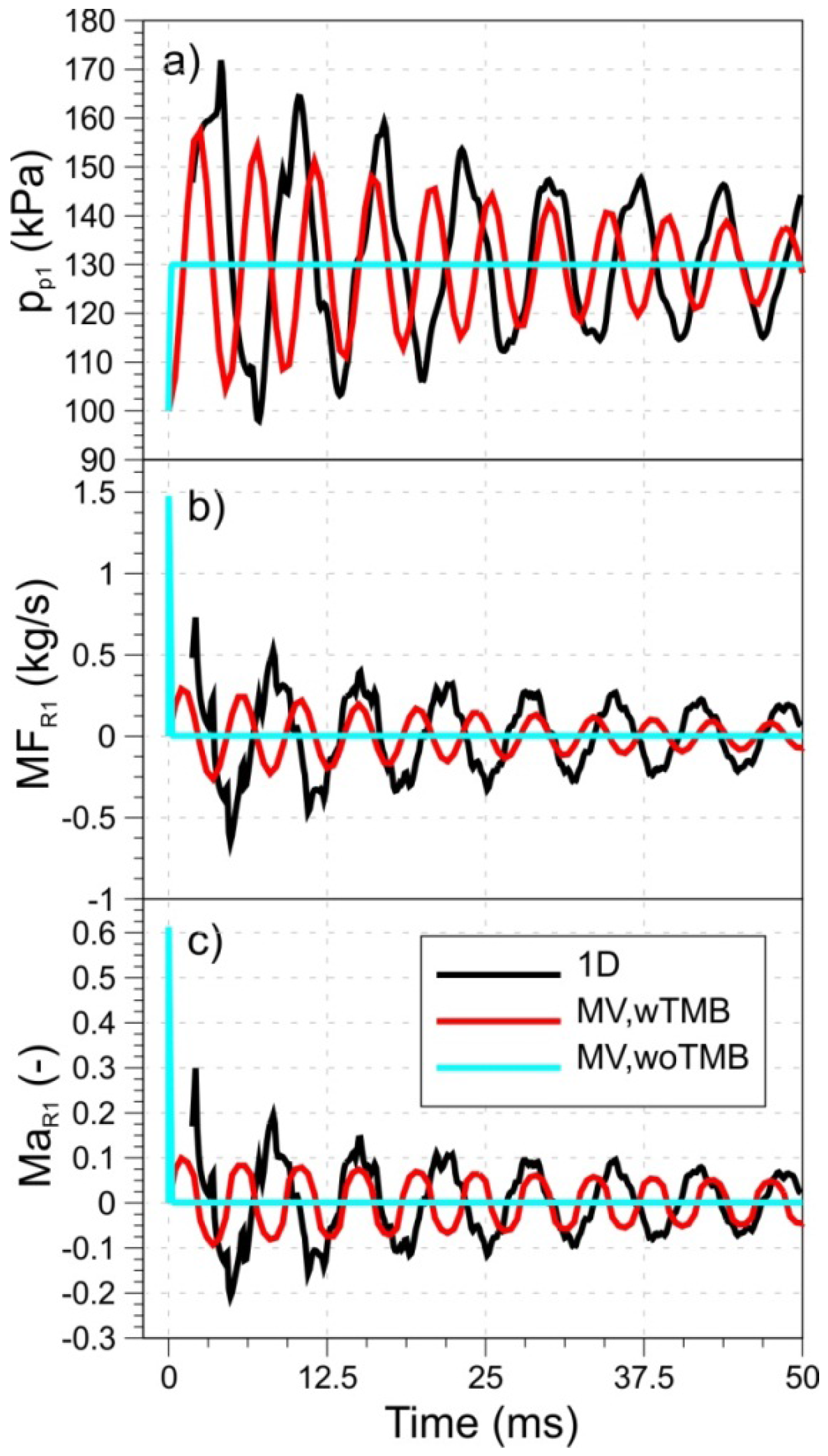
Figure 5 shows a comparison of the transient results for the first 50 ms. These results are calculated with: (a) the mean-value model without the TMB (MV,woTMB—time step of 0.005 ms was used); (b) the mean-value model with the TMB (MV,wTMB—time step of 0.5 ms was used); and (c) the commercial 1D simulation tool AVL BOOST [
32] that is capable of capturing the wave dynamics in pipes (1D). Both results of the mean-value model were calculated using the R scheme and by considering the wLF. In the 1D simulation the same value of
L was used as in the case of the MV,wTMB. The length
L was discretized with 96 cells in the 1D model.
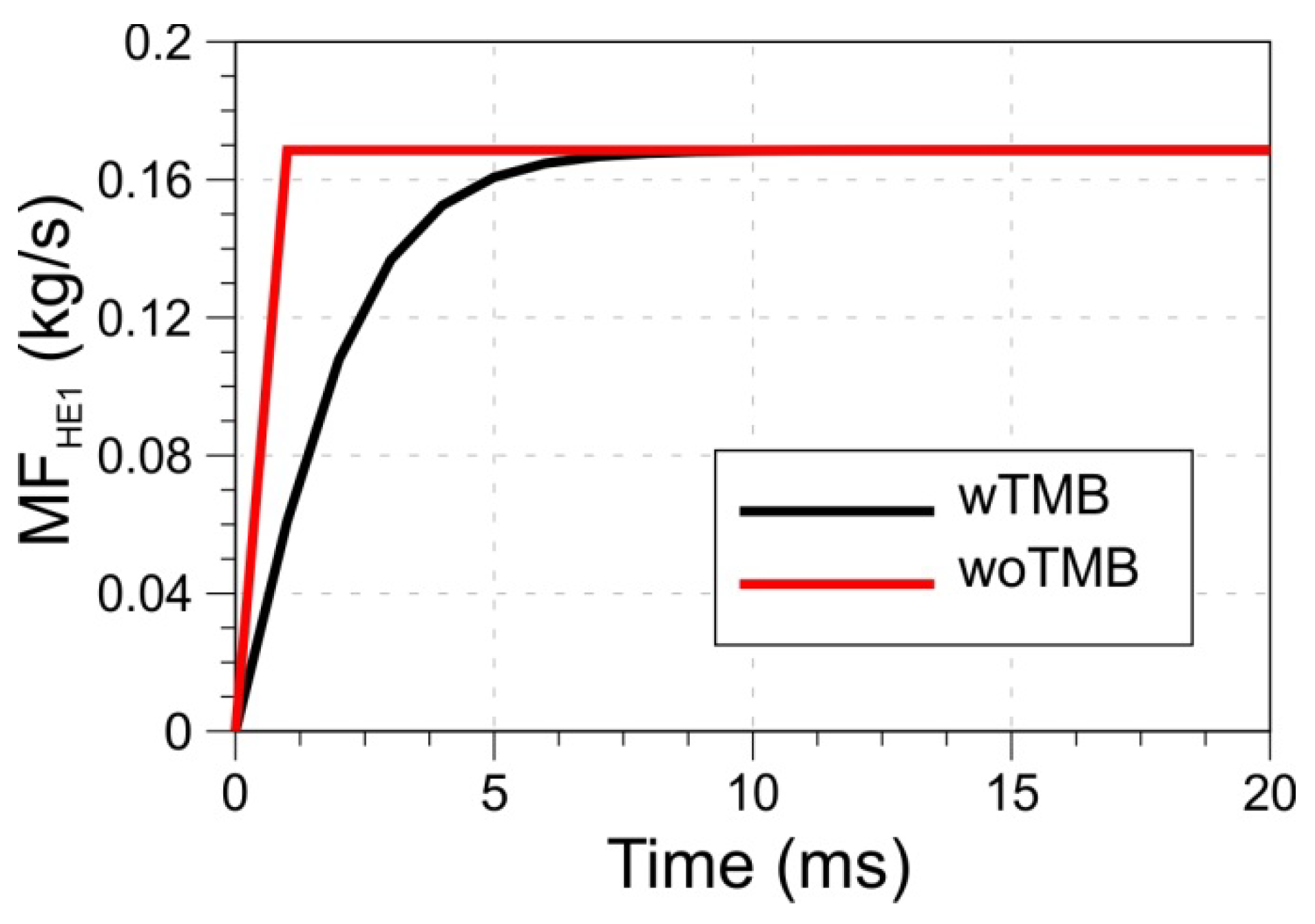
In the model without the TMB (MV,woTMB) mass flow (
Figure 5b) and thus Mach number (
Figure 5c) increase instantaneously to a very high value as this approach does not consider inertial effects arising from the time variation of the mass flow. Consequently, the pressure in P1 (
Figure 5a) reaches a steady-state value nearly instantly in this case, since the cross-section of R1 is relatively large related to the volume of P1. In this numerically stable case, all parameters remain constant after this initial transient phase.
On the other hand, the results predicted by the 1D simulation tool reveal physically meaningful flow evolution in R1 and pressure oscillations in P1. Due to the spatial 1D discretization, 1D simulation tool resolves for wave dynamics in the R1. This means that at
t0 the pressure wave starts traveling from the boundary towards the P1 thereby accelerating the flow. After reaching the P1, the pressure wave is reflected at the open end as the rarefaction wave. This complex interaction of the pressure waves in R1 that drive the mass flow can be seen in highly dynamical traces of the mass flow and Mach number for the 1D case (
Figure 5b,c). As a result, a highly oscillating pressure is characteristic for P1 (
Figure 5c). It can be observed that pressure in P1 frequently reaches higher values compared to the pressure at the boundary,
i.e., A1, which is the consequence of combined inertial effects arising from the time variation of the mass flow and wave dynamics. The former effect namely increases the pressure due to inertial forces that are needed to decelerate the flow.
Figure 5.
A1-R1-P1-R2-A2: traces of (a) pressure in P1 and (b) the mass flow and (c) the Mach number through the middle of the R1 calculated with: (1) the mean-value model without the TMB (MV,woTMB); (2) the mean-value model with the TMB (MV,wTMB); and (3) the 1D simulation tool capable of capturing the wave dynamics in the pipes (1D).
Figure 5.
A1-R1-P1-R2-A2: traces of (a) pressure in P1 and (b) the mass flow and (c) the Mach number through the middle of the R1 calculated with: (1) the mean-value model without the TMB (MV,woTMB); (2) the mean-value model with the TMB (MV,wTMB); and (3) the 1D simulation tool capable of capturing the wave dynamics in the pipes (1D).
Figure 5 shows that consideration of the TMB also makes it possible to model pressure pulses in the P1, which is related to the inertial effects arising from the time variation of the mass flow that are inherent to Equations (30) and (32). Here it is worth recalling that TMB approach relies on a single momentum equation applied to the complete transfer element, whereas in the 1D model, R1 is discretized with 96 cells. Therefore, results of the 1D and MV,wTMB models do not coincide fully as 1D model considers also wave dynamics in addition to the consideration of the inertial effects arising from the time variation of the mass flow. This difference is discernible through the following phenomena. Mass flow and thus Mach number in R1 as well as resulting pressure in P1 feature more pronounced dynamics in the 1D model as wave propagation phenomena are superimposed on the mass flow variation pattern driven by the inertial effects arising from the time variation of the mass flow. Therefore also frequencies of the oscillations of all parameters do not coincide fully as in the MV,wTMB case frequency is mainly defined by the pipe parameters and the pressure difference [Equation (32)] as well as by the volume of P1, whereas in the 1D case it is also influenced by wave dynamics. Although 1D models feature a more profound modelling depth, it is promising that the pressure pulses modelled with consideration of the TMB mimic similar trends. If desired, frequency of the pulses might be tuned by varying
L in Equation (30) or (32). This example shows that consideration of the TMB makes it possible to model an additional dynamic effect of the system within the mean-value framework. These effects are for example of particular importance after sudden openings of the throttle valve.
5.2. Turbocharged Engine Example
In this section an experimentally validated model of a series production 1.6 L turbocharged direct-injection spark-ignition engine equipped with a throttle, a turbine with waste-gate valve and a camshaft phasing of the intake valves is analysed (
Figure 2b). In this engine model heat transfer is considered in the exhaust manifold (P4) and in the throttle (R1), the latter also acting as the intercooler to optimize the computational expenses of the engine model. For the TMB case it was again assumed that the length of the gas column (
L) is equal to three hydraulic diameters of the cross-sectional area of the restriction.
The surrogate engine-block model is embedded in the overall gas path model as a transfer element, which calculates mass, enthalpy and species fluxes as well as the engine torque with trained surrogate models (
Figure 2b). The training of the models is done via Relevance Vector Machines [
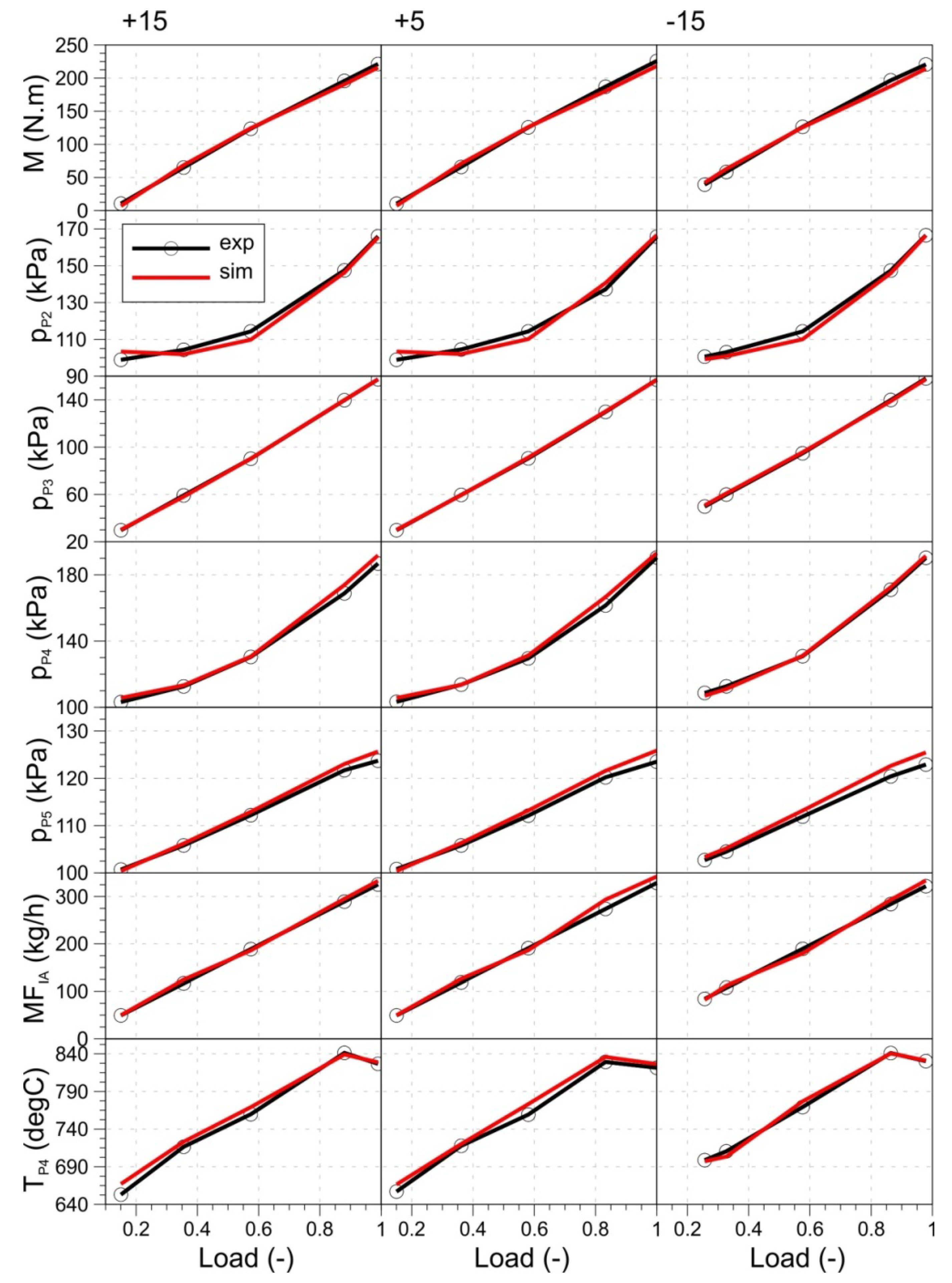
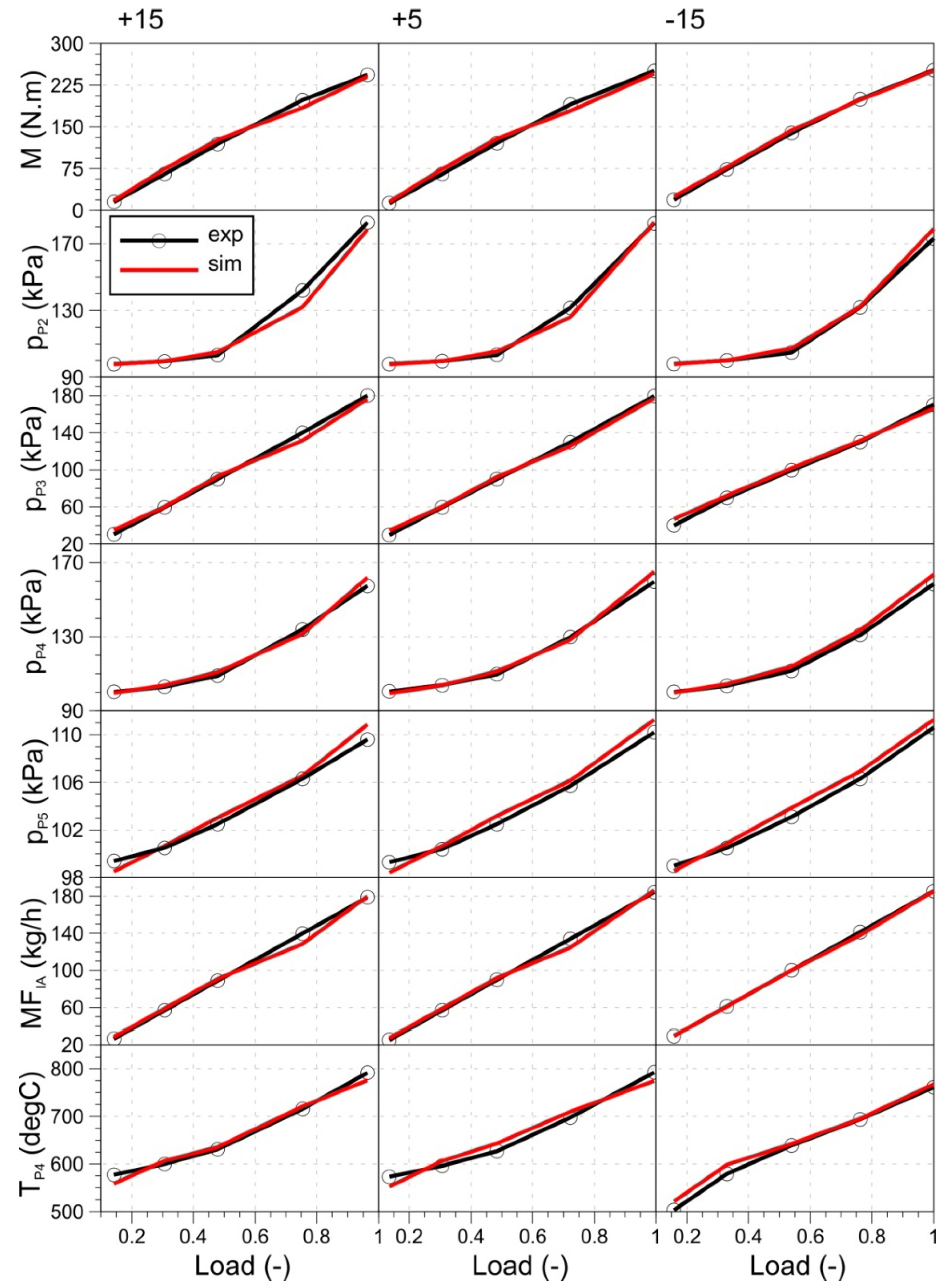
33] using experimental data. Each such surrogate model features different input variables and can thus be used very flexible. The air mass flow surrogate features the following inputs: engine speed, intake manifold pressure and camshaft phasing of the intake valve. Exhaust enthalpy and torque surrogate features the following inputs: engine speed, air mass flow and spark advance. Exhaust species flows were balanced considering mass flows of air and fuel. All engine models analysed in this paper are transient and thus steady-state operation was achieved by running the model for sufficient time at constant speed and load until convergence of the observed parameters was achieved. In the analysed case a simple mechanical consumer is therefore attached to the engine to ensure that the engine runs at a steady speed. The experimental validation of the model is presented in
Appendix B.
A full-load operating point at 3000 rpm was analysed to show the stability of both mean-value approaches (with and without the TMB), since full-load cases represent the most severe test for the stability of the model due to low pressure ratios across the throttle. At a numerically stable operating point the model with and the model without the TMB return identical results. The maximum time step that allows an evaluation of stable results if the TMB is not considered is 1.3 ms for the R and 1.1 ms for the H scheme. For larger time steps, stability issues in terms of mass-flow reversals through the throttle, i.e., R1, were observed. If the TMB is considered stable results are obtained with a much larger time step of 4.5 ms for the R and 3.9 for the H scheme. It should be noted that the difference in the maximum time steps for the case when the TMB is considered or the case when the TMB is not considered decreases at part loads where the throttle is only partially opened, since in this case the pressure ratio across R1 is increased and the mass flow is reduced. However, consideration of the TMB always enables the use of larger integration time steps and thus shorter computational times.
The CPU time to calculate one complete integration step on a single core of the Intel i7 950 3.07 GHz processor is 0.258 ms (R) and 0.189 ms (H) for the case with the TMB and 0.209 ms (R) and 0.146 ms (H) for the case without the TMB. The difference between the cases with and without the TMB arises from the extra computational load associated with the more complex computation procedure when the TMB is considered. At this point it should be noted that the computational time of the heat exchanger routine is very similar with and without a consideration of the TMB; however, more operations are needed when evaluating the restriction when the TMB is considered as given in
Section 2.2 and
Section 2.3. Based on the above facts it can be concluded that much faster computational times can be achieved when considering the TMB, since it enables utilization of significantly larger integration time steps at only slightly increased CPU time needed to calculate one complete integration step. For the analysed case the ratio between the real-time factors (RT = CPU time/physical time) of the cases with and without the TMB,
i.e., RT
wTMB/RT
woTMB, equals 0.356 for the R and 0.366 for the H scheme.
5.3. Naturally Aspired Engine Example
The naturally aspired engine model (
Figure 2c) is derived from the turbocharged model presented in
Section 5.2 by omitting turbocharging components and adequately simplifying the engine gas path topology while retaining the engine-block model. This example is analysed to expose the impact of including the compressor and the turbine components on the maximum time steps of the engine model, which are imposed by the stability criteria.
The full-load operating point at 3000 rpm was also analysed to maintain consistency with the analysis in the previous section. Like in
Section 5.2, the stability issues of the naturally aspired engine are also indicated by the mass-flow reversals through the throttle,
i.e., R2. Again, at a numerically stable operating point the model with and the model without the TMB give identical results. The maximum time step that allows an evaluation of stable results if the TMB is not considered is 0.4 ms for R and 0.3 ms for H scheme. If the TMB is considered stable results are again obtained with a much larger time step of 2.9 ms for R and 1.6 ms for the H scheme.
It is evident that maximum time steps of the naturally aspired engine are much shorter compared to the ones of the turbocharged engine analysed in the previous section. This is mainly related to the application of the turbocharger. Typically, intake or exhaust plenum and related transfer elements are the most prone to instabilities. In the case of the turbocharged engine the compressor forces and the turbine restricts the flow significantly more than the wide-open transfer elements where no mechanical work is added to or extracted from the flow, e.g., throttle, heat exchanger, air cleaner or the exhaust after-treatment devices. Therefore, simulation models of the turbocharged engine typically allow for larger integration time steps compared to similar naturally aspired engines.
The CPU time to calculate one complete integration step of a naturally aspired engine on a single core of the Intel i7 950 3.07 GHz processor is 0.13 ms (R) and 0.09 ms (H) for the case with the TMB and 0.1 ms (R) and 0.075 ms (H) for the case without the TMB. Again, the difference arises from the extra computational load associated with the more complex computation procedure when the TMB is considered. In this case the ratio between real-time factors for the cases with and without the TMB, i.e., RTwTMB/RTwoTMB, equals 0.18 for the R and 0.23 for the H scheme, and thus the model with the TMB again allows for significantly faster computational times.
5.4. Transient Engine Example
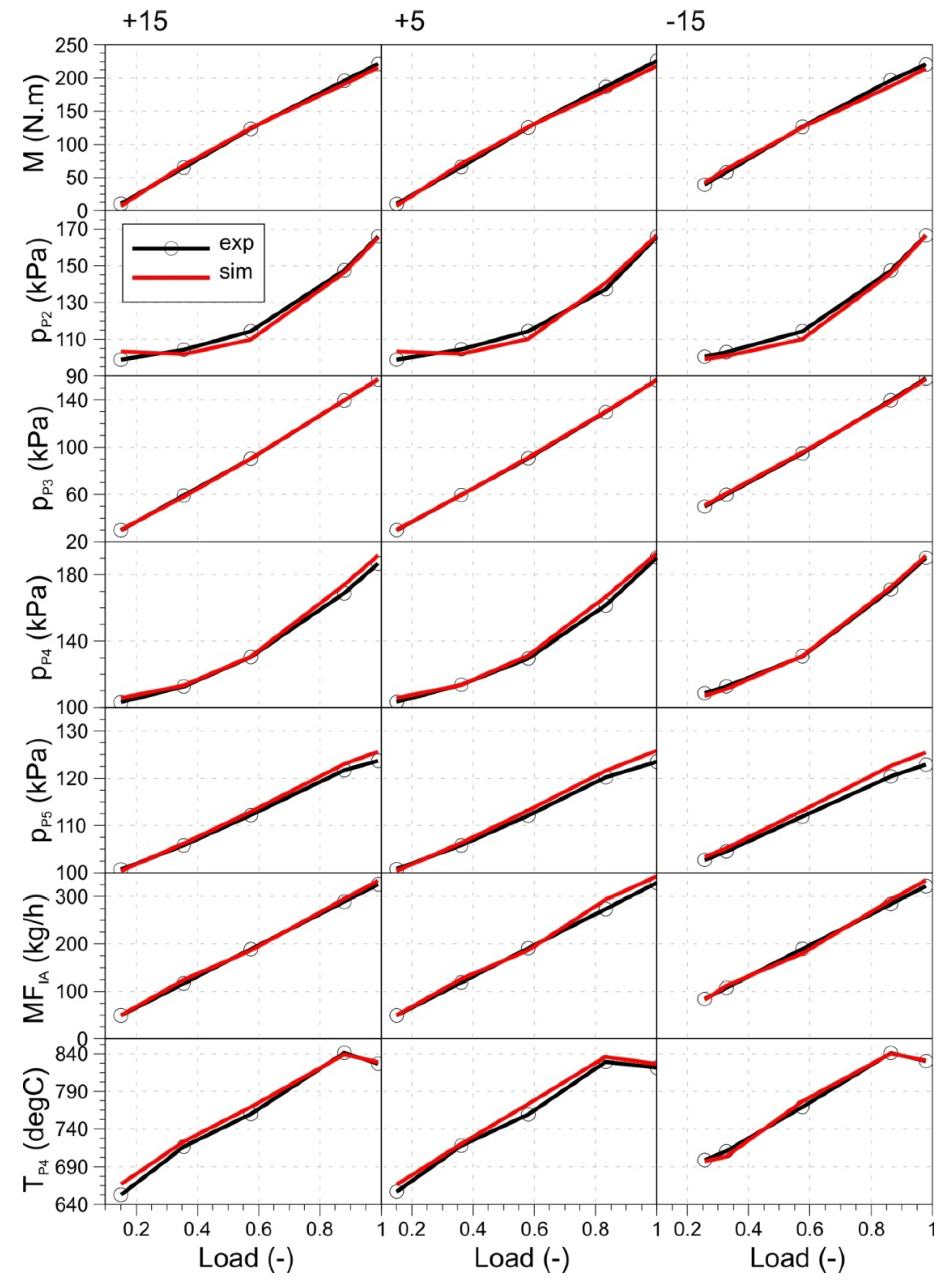
In this section an experimentally validated model of a series production 1.4 L turbocharged, intercooled, diesel engine with a cooled external EGR and a variable turbine geometry is analysed (
Figure 2d). In this case engine block-model features input of the fuel injection instead of the spark timing and camshaft phasing of the intake valve is not considered as engine features constant valve timings. In this engine model the intercooler and the EGR cooler that also acts as the EGR valve are modelled with heat transfer elements to ensure that both elements feature correct lengths. The engine powers a 1.3-ton vehicle that is equipped with a 6-speed manual gearbox. The vehicle is modelled by a longitudinal vehicle model that consists of the following driveline components: clutch, gearbox, final gear and differential, brakes, wheels and chassis. The complete engine and vehicle model is a forward-facing model. The results are shown for segments of the NEDC, where vehicle is driven on a chassis dynamometer. All results related to the transient engine operation were calculated using the R scheme and an integration time step of 1ms to avoid differences due to different integration time steps. This integration time step ensures numerical stability for both models,
i.e., with and without the TMB. Due to the fact that the computational expenses of the heat exchanger are similar in the case with [Equation (30)] and associated equations] and without [Equations (25)–(27)] the TMB the computational time of the case with the TMB was only 1% longer over the complete NEDC compared to the case without the TMB.
Comparison of the results with and without consideration of the TMB is of particular importance, since consideration of the TMB is aimed at improving stability of the engine plant model while simultaneously preserving a high degree of its dynamic characteristics. Therefore it is intended to prove that results of both models are very similar for the integration time step that ensures numerical stability for both models, whereas the model with consideration of the TMB certainly possesses the potential to retain numerical stability also at larger integration increments as analysed in the previous sections. Here it is worth recalling that diesel engine analysed in this section does not feature any variable flow restrictions in the intake manifold, which might provoke effects presented in
Figure 5.
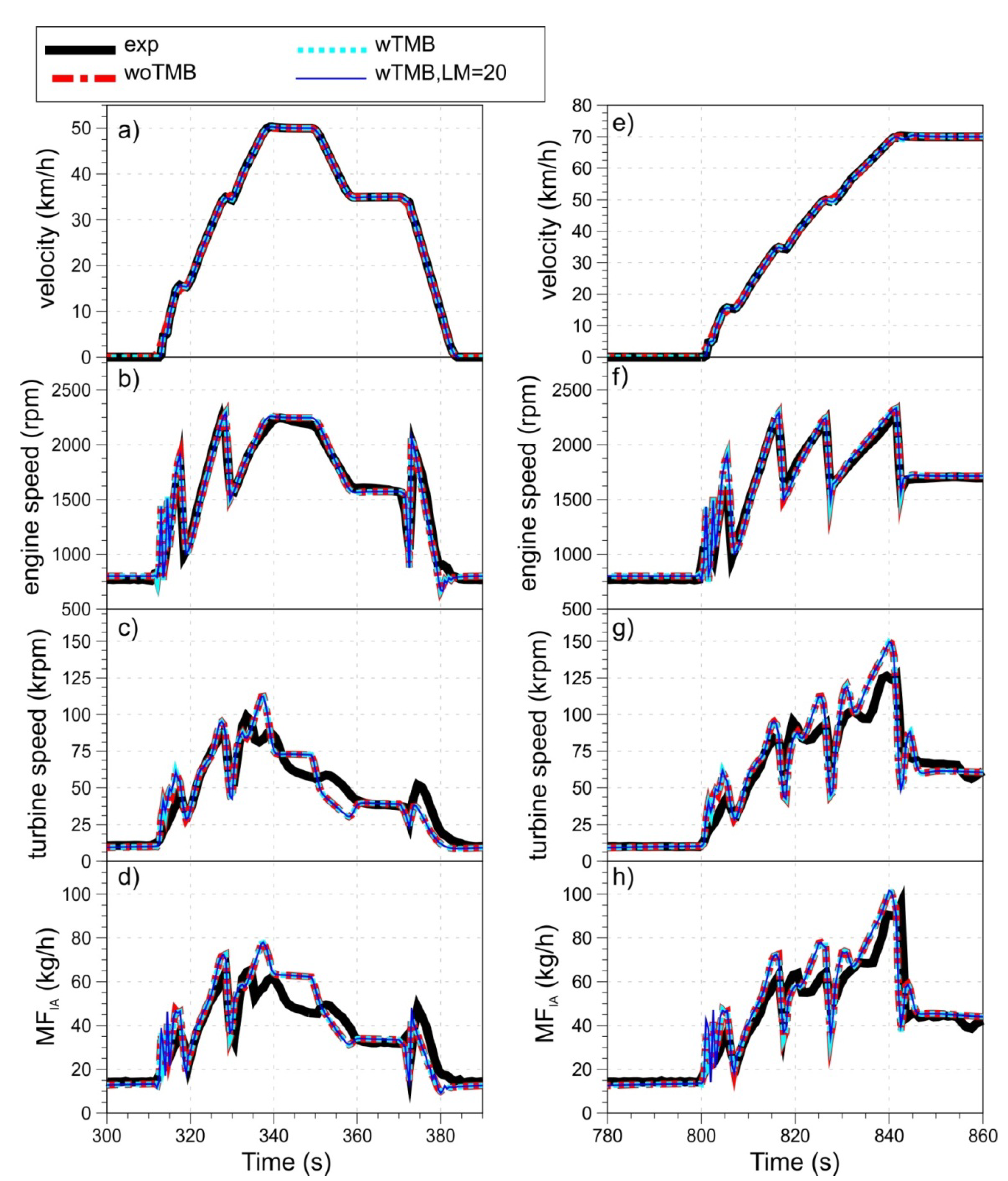
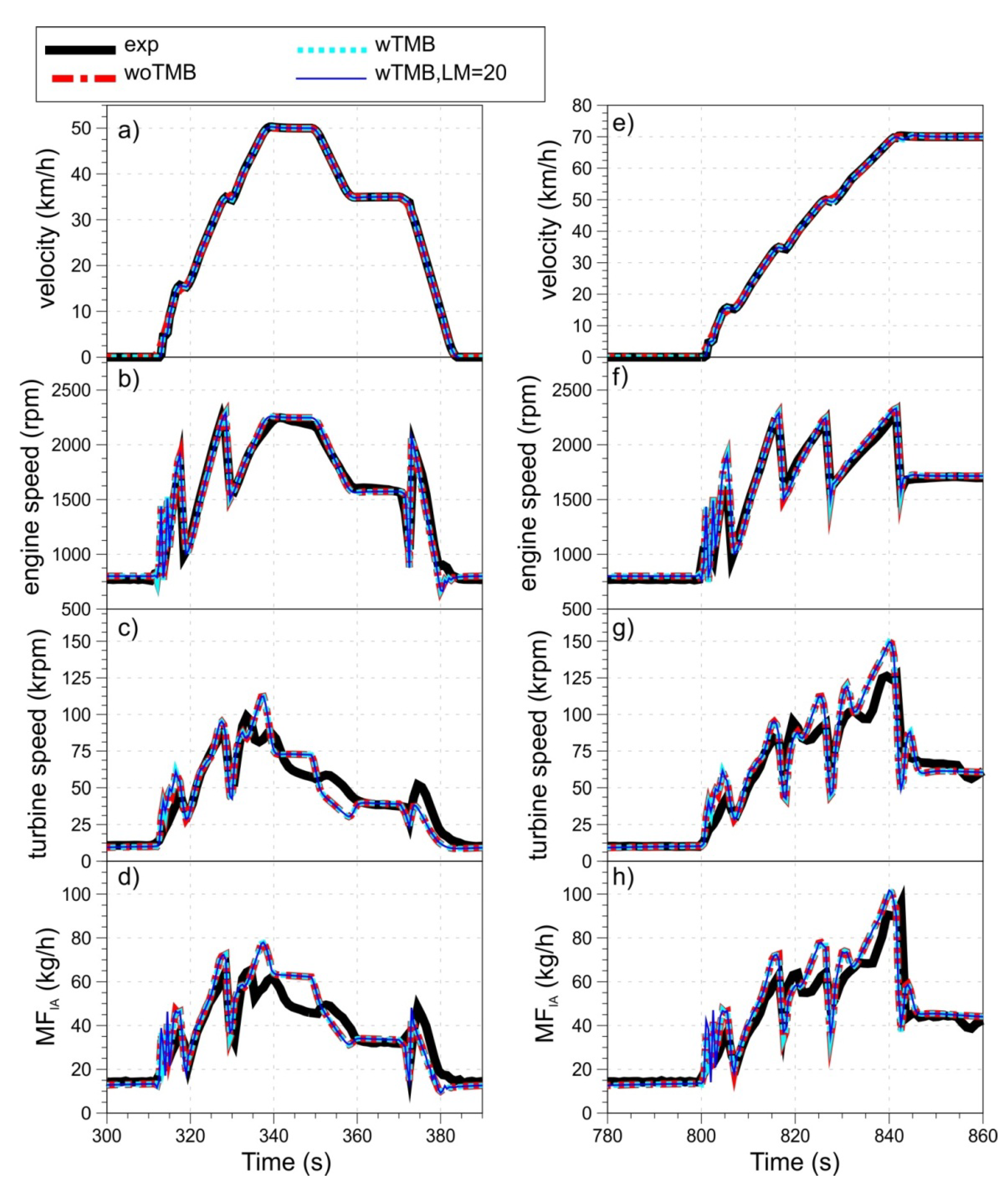
Figure 6 shows comparison between the experimental data and the simulation results without (woTMB) and with (wTMB) consideration of the TMB. An additional case, where all the lengths in the transfer elements were multiplied by an excessively high factor of 20 (wTMB,LM = 20), is also shown in the figure to demonstrate the influences of the increased inertial effects arising from the time variation of the mass flow on the engine results. It is clear from the figure that all the simulation results agree relatively well with the experimental results. The minor differences can mainly be explained by two facts. First, a simplified controller model that mimics the functionality of the real controller was used to control the engine. Although the applied controller works relatively well it does not feature all the functionality of the real engine controller, which certainly leads to some discrepancies between the experimental and the simulation results. Second, the real driver and the driver model do not behave identically, which leads to differences in the engine input and thus these discrepancies are added to the ones arising from the simplified controller model.
Figure 6.
Results of the two NEDC segments showing a comparison of the experimental results (exp) to the results without the TMB (woTMB), with the TMB (wTMB) and with the TMB where all the lengths in the transfer elements were multiplied by an excessively high factor of 20 (wTMB,LM = 20) for vehicle velocity (a–e), engine speed (b–f), turbine, i.e., turbocharger speed (c–g) and intake mass flow (d–h).
Figure 6.
Results of the two NEDC segments showing a comparison of the experimental results (exp) to the results without the TMB (woTMB), with the TMB (wTMB) and with the TMB where all the lengths in the transfer elements were multiplied by an excessively high factor of 20 (wTMB,LM = 20) for vehicle velocity (a–e), engine speed (b–f), turbine, i.e., turbocharger speed (c–g) and intake mass flow (d–h).
More important in the light of the topic presented in the paper is the fact that all the simulation results,
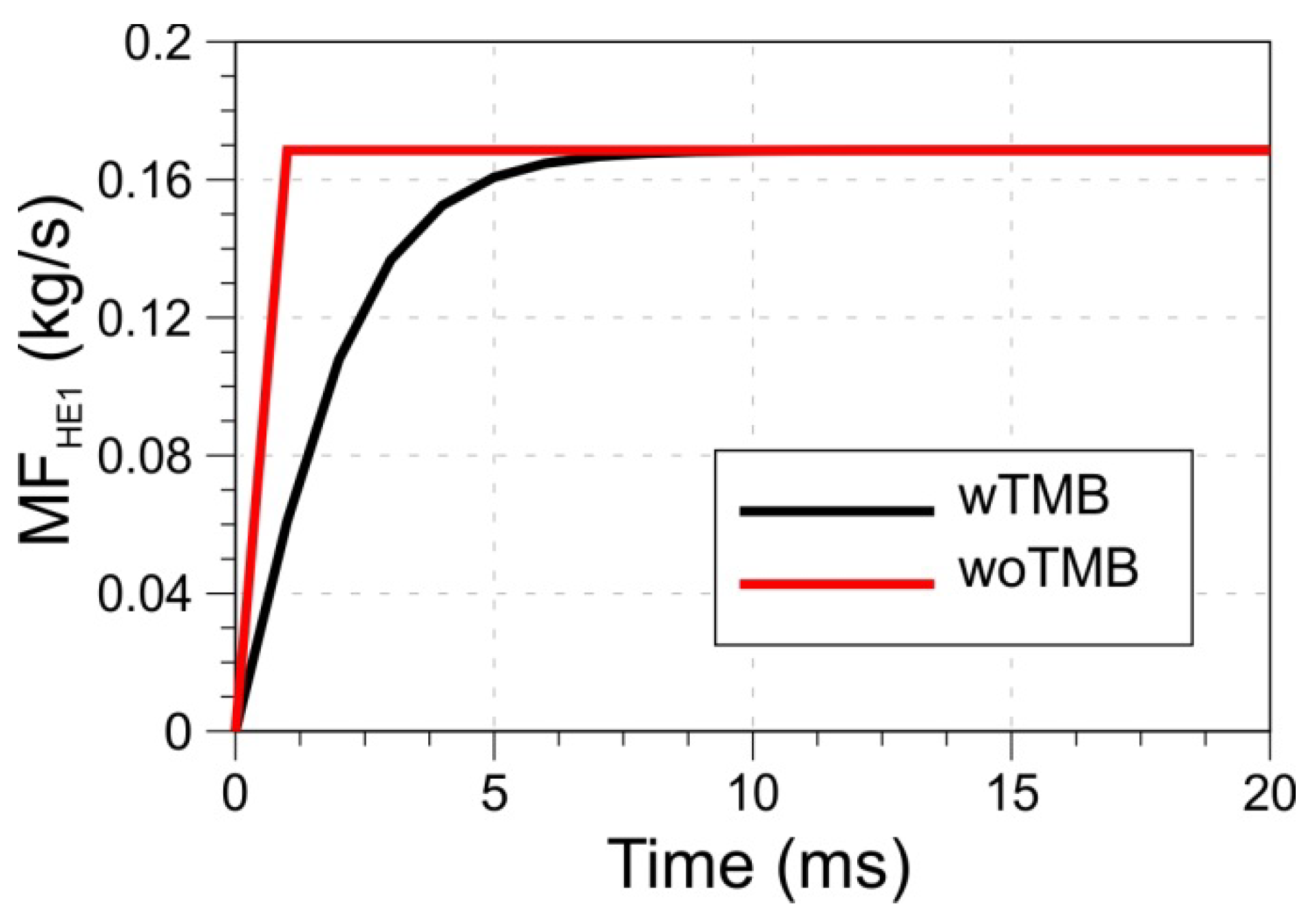
i.e., those without and those with the TMB, coincide nearly perfectly for all the engine parameters. This can be explained by analysing the response times that are presented in
Figure 5 and
Figure A3 (
Appendix C). There it is shown that for the geometrical characteristics of the components that are in the range of those used in the automotive application, the typical response times, due to consideration of the TMB, are of the order of a few milliseconds. Due to the fact that the typical response times of the engine manifolds,
i.e., the plenums, are approximately two orders of magnitude longer, it is not even possible to observe any differences due to excessive prolongation of the elements,
i.e., the case wTMB,LM = 20, on the time scale used in
Figure 6.
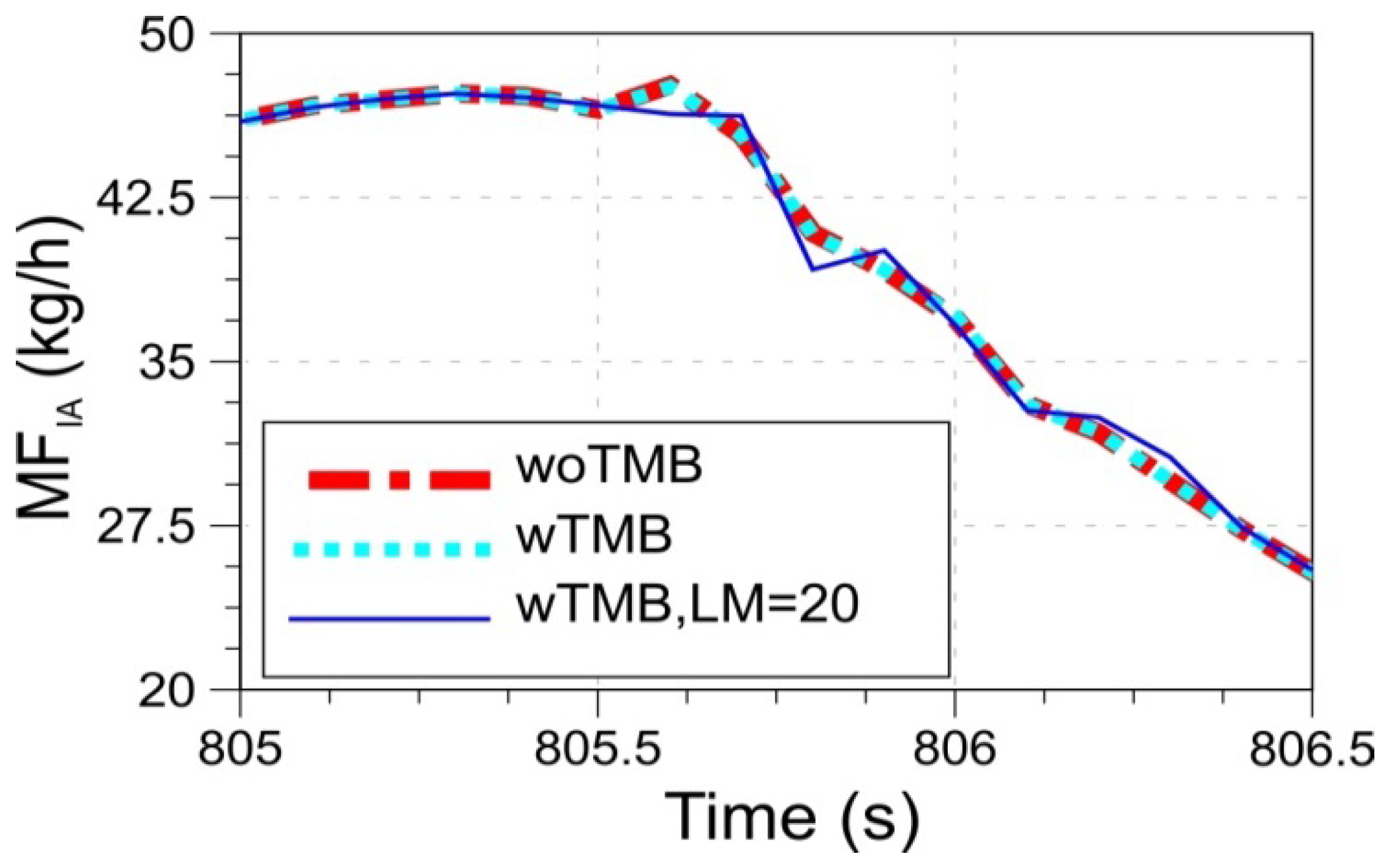
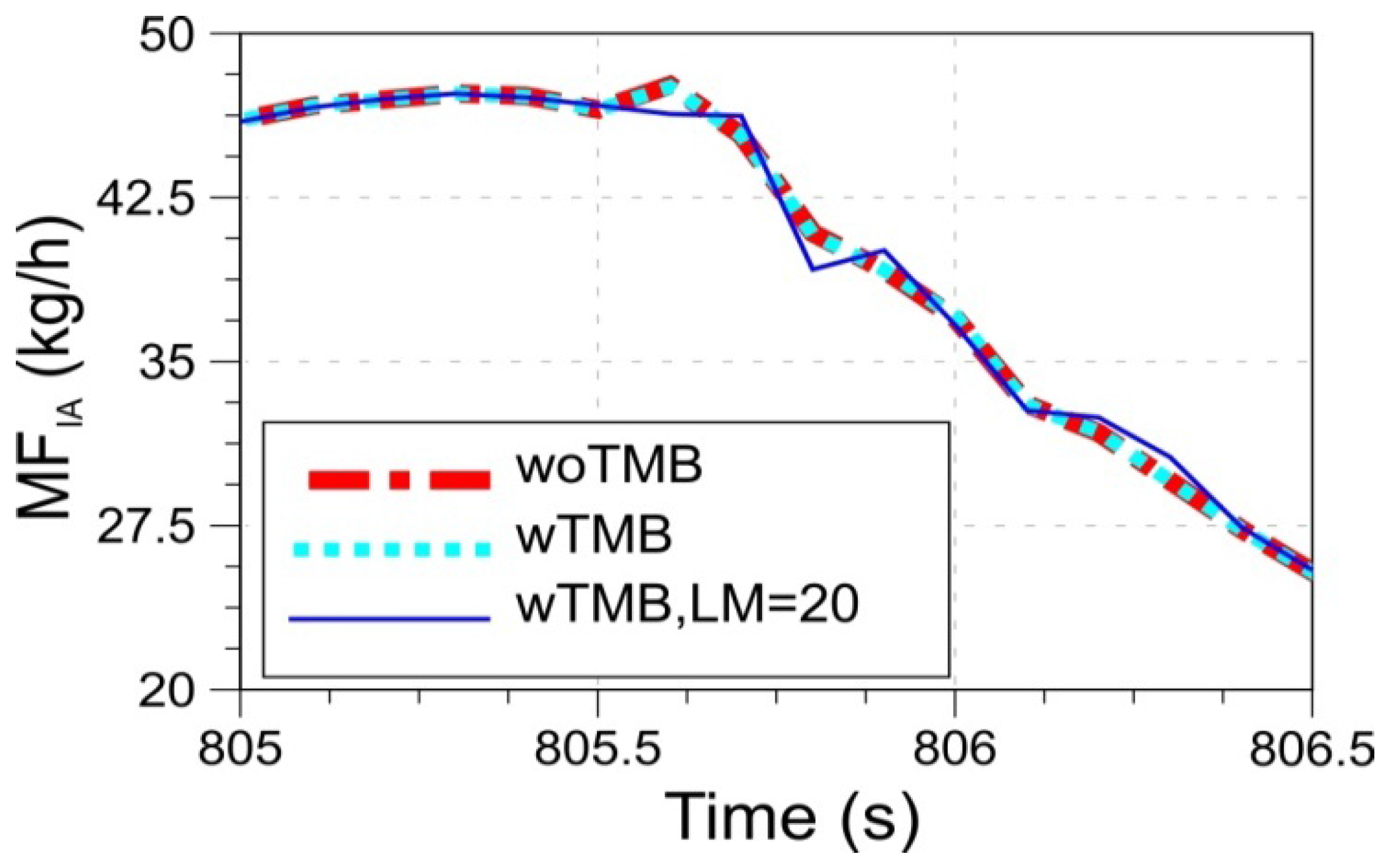
Only if a zoom-in into the segment of the gear shift from the first to the second gear (around second 805.5) is analysed (
Figure 7) can some minor differences between simulation results be observed. In this interval the engine speed and thus also the mass flow change significantly due to the gear shift (
Figure 6).
Figure 7 indicates that up to the gear shift the results of all the models coincide, perfectly. Moreover, the results of the cases woTMB and wTMB also coincide perfectly throughout the complete transient phase, since the response time due to a consideration of the TMB is much smaller compared to the one of the plenum dynamics when realistic component lengths are considered. If the elements are excessively prolonged (wTMB,LM = 20) their response time is increased, whereas prolonged lengths also increase the amplitudes of the pressure fluctuations during fast transients. This is caused by the fact that in long elements more time is needed to accelerate the gas column with the same pressure difference leading to a lower frequency and a higher amplitude of the mass-flow oscillations. This phenomenon can be explained by a combined consideration of Equation (30) [or also Equation (32)] and
Figure 5. These small, low-frequency, mass-flow oscillations can be observed in the fast transient region for the case wTMB,LM = 20.
Figure 7.
Zoom-in into the segment of the NEDC, which exposes minor differences of the intake mass flow calculated with the wTMB,LM = 20 compared to ones calculated with the woTMB and wTMB.
Figure 7.
Zoom-in into the segment of the NEDC, which exposes minor differences of the intake mass flow calculated with the wTMB,LM = 20 compared to ones calculated with the woTMB and wTMB.
Transient results thus indicate that a consideration of the TMB preserves dynamic characteristic of the engine model as the response times of the elements due to a consideration of the TMB are significantly below the response times of the engine manifolds within the framework of the MVEMs. Results also indicate that it is possible to slightly prolong the lengths of the elements without notably influencing dynamic characteristic of the model if this is needed to improve the stability of the model. However, these prolongations should certainly not be excessive. These results confirm that enhanced stability of the engine model is preferably achieved with the application of the TMB, as alternative frequently used technique that relies on increasing volumes of the plenums (rationale can be deduced from
Appendix A) more significantly alters dynamic characteristic of the engine model.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}