

Error Analysis of the Convex Hull Method for the Solution of the Distribution System Security Region


Abstract
1. Introduction
1.1. General Context
1.2. Literature Review
- (1)
- In 2012, the concept of DSSR was proposed, and the analytical method was applied to solve the DSSR model [1].
- (2)
- In 2018, the convex hull method was applied to solve the IES security region model [21].
- (3)
- In 2020, the concave region was found in the DSSR [22].
- (4)
- In 2021, the convex hull method was applied to solve the DSSR model [19].
- (5)
- In 2021, the concavity and convexity of the DSSR was first proposed and analyzed [24].
1.3. Motivation
1.4. Contributions and Scope
1.5. Document Organization
2. Model and Convex Hull-Based Method for Solving the DSSR
2.1. Model of the DSSR
2.1.1. Mathematical Model of the Operating Point and State Space
2.1.2. Mathematical Model of the DSSR
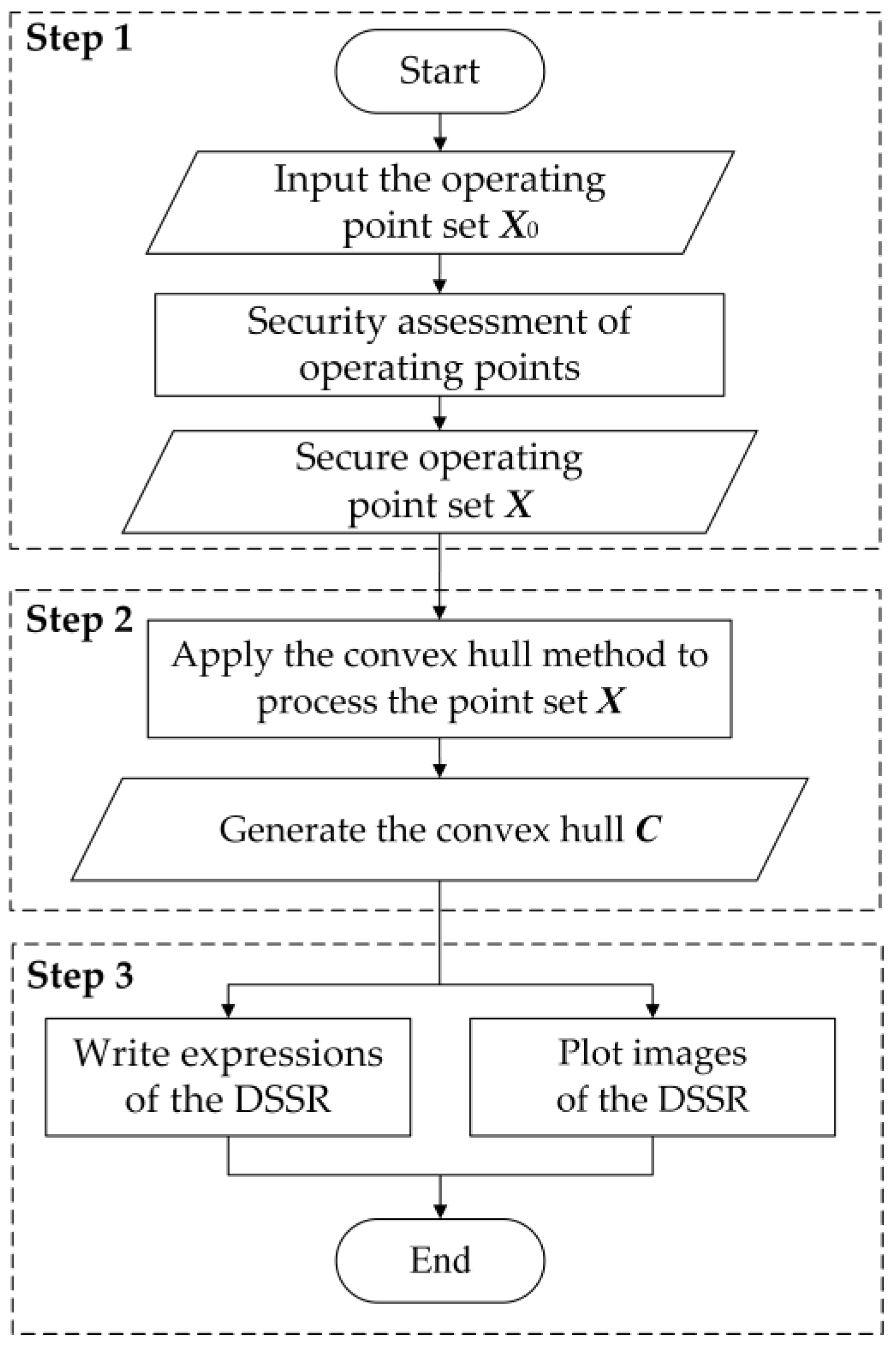
2.2. Convex Hull-Based Method for Solving the DSSR
2.2.1. Convex Set and Non-Convex Set
2.2.2. Convex Hull Problem and Solving Algorithms
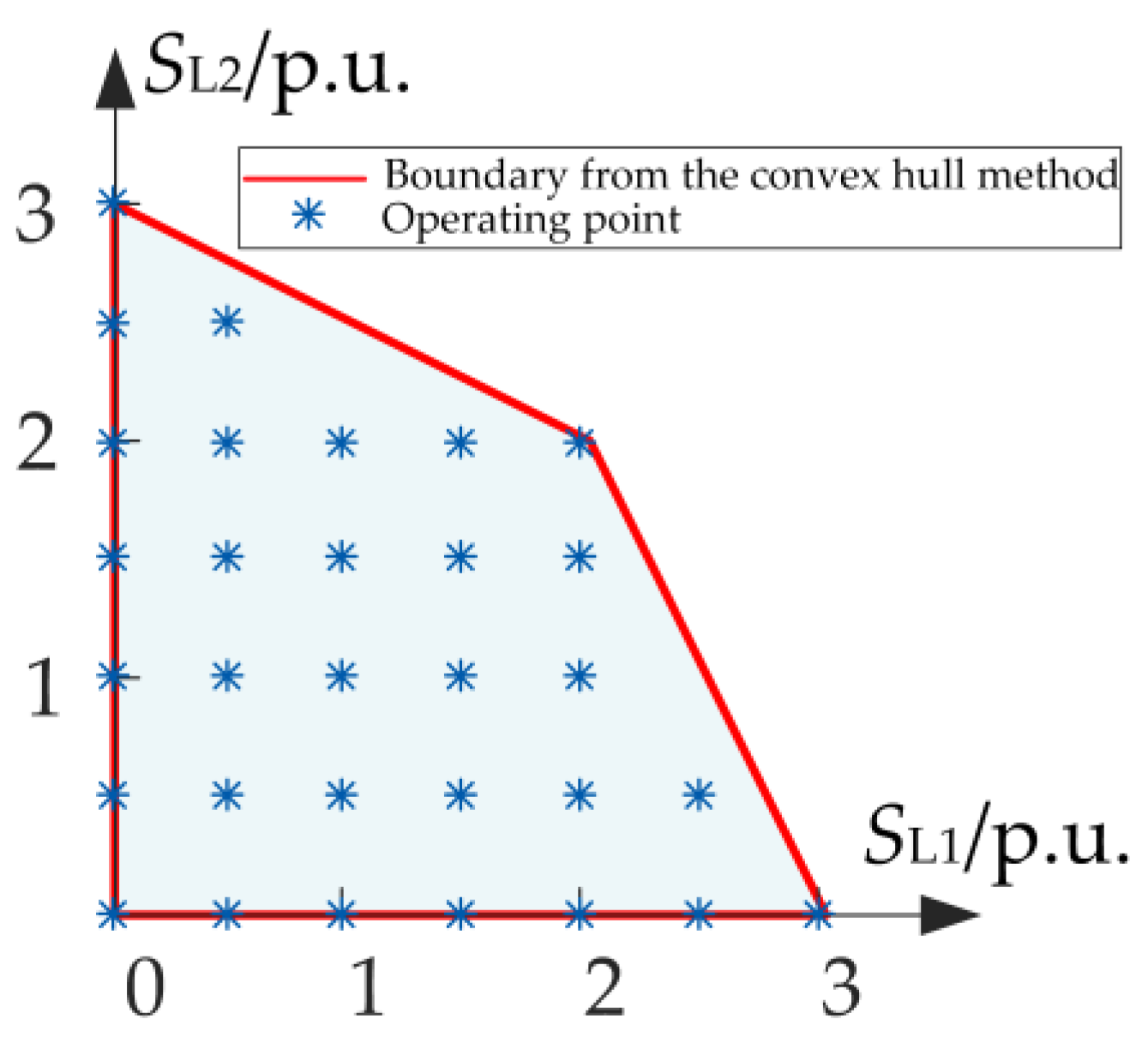
2.2.3. Convex Hull Method for Solving the DSSR
3. Theoretical Analysis of Convex Hull Method for Solving the DSSR
3.1. Convex and Concave Regions of the DSSR
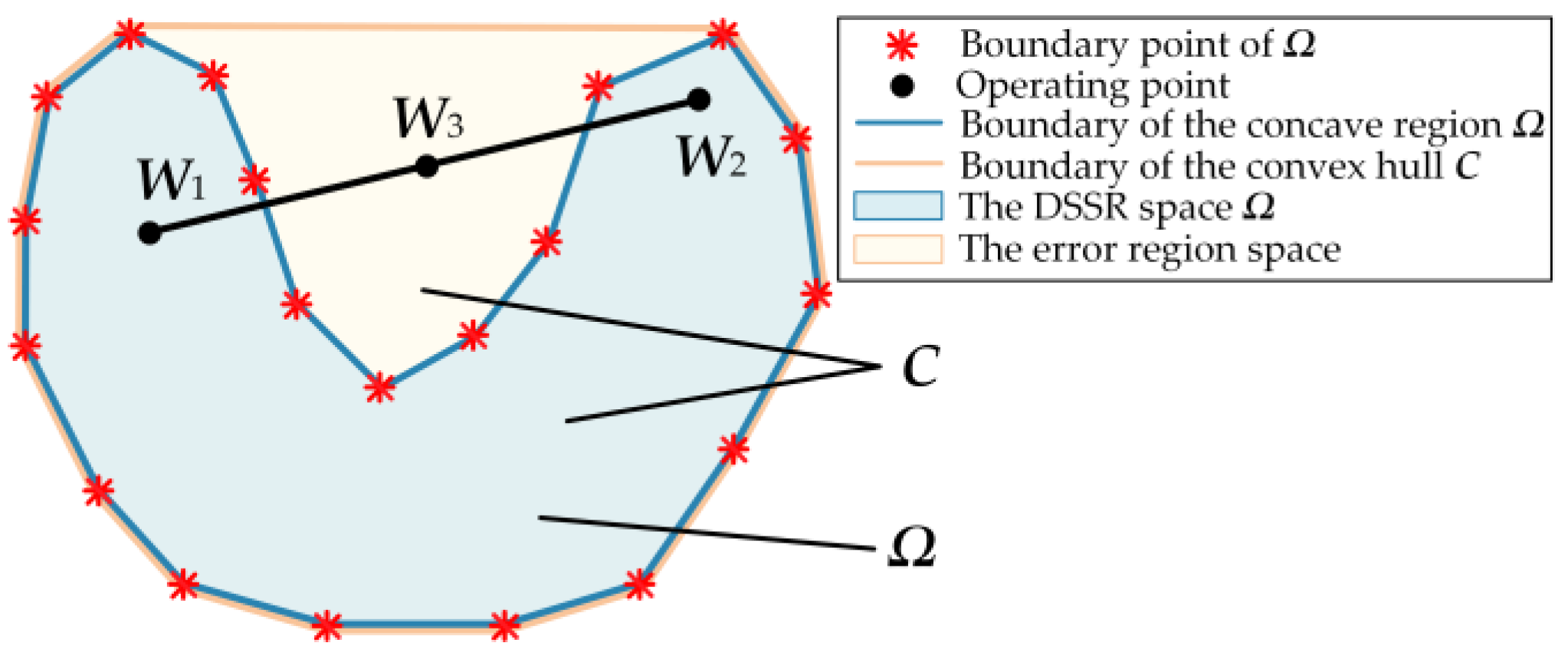
3.1.1. Concepts of the Convex Region and Concave Region
3.1.2. Formation Conditions for the Convex Region and Concave Region
3.2. Theorem and Proof of Error in the Convex Hull Method for Solving the Concave Region
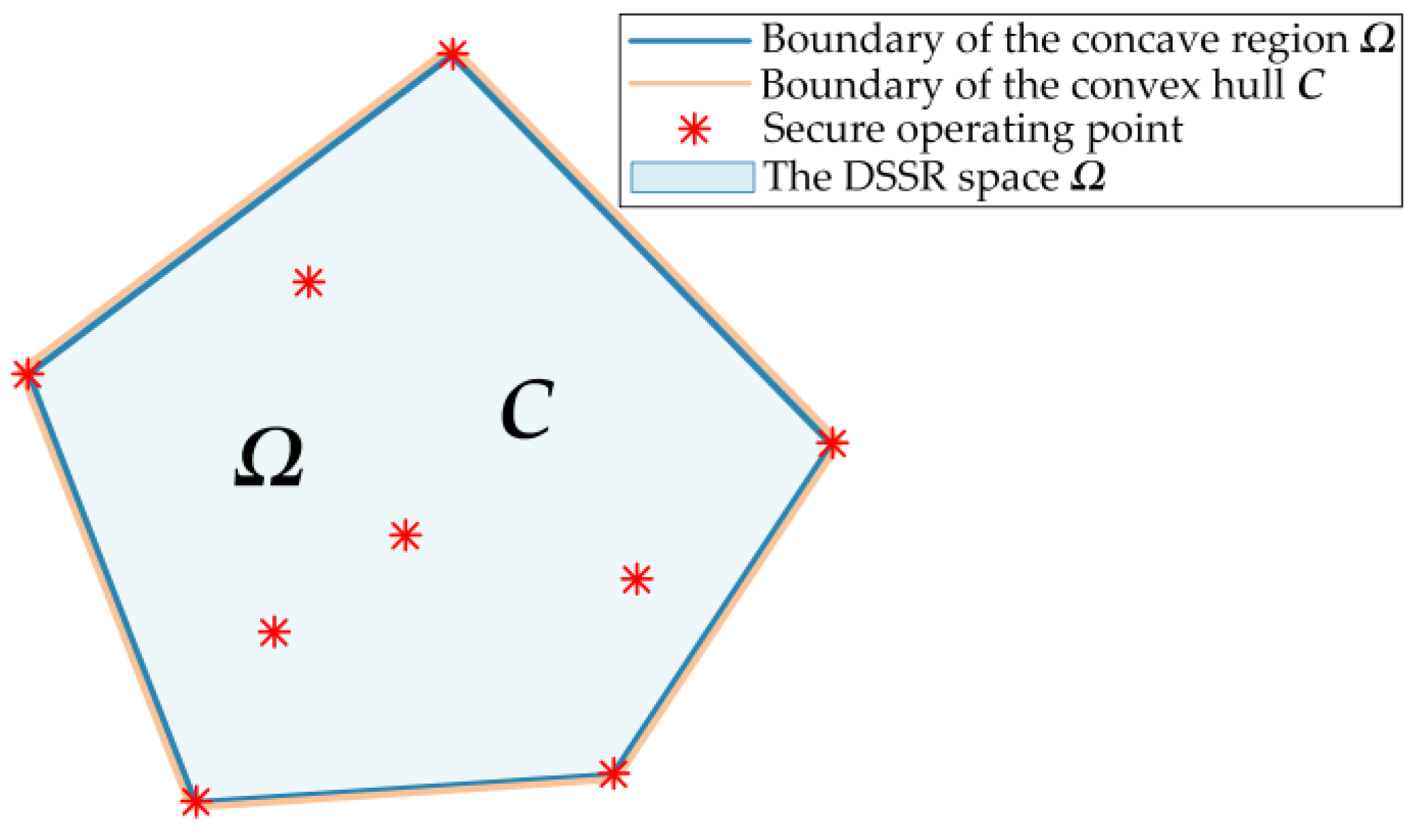
3.3. Theorem and Proof of Error in the Convex Hull Method for Solving the Convex Region
3.4. Conditions for Distribution Networks Applying the Convex Hull Method
4. Concave Region Case Study
4.1. Overview of the Case
4.2. Solution of the DSSR
4.2.1. Scenario 1: SL3 = 1 MVA
- (1)
- Analytical method
- (2)
- Convex hull method
4.2.2. Scenario 2: SL3 = 2 MVA
- (1)
- Analytical method
- (2)
- Convex hull method
4.3. Error Analysis
4.3.1. Area of the DSSR
- (1)
- When SL3 is 0 or 1.5 MVA, the error is minimized at zero. The reason is that the DSSR is a convex region at these points.
- (2)
- When SL3 is 3 MVA, the relative error is maximized at infinity. The reason is that the security region degenerates into an “L”-shaped polyline segment with zero area, while the convex set containing all points within the region is a triangle. Since the convex hull method still generates a nonzero area for this triangle, the relative error reaches infinity.
4.3.2. Shape of the DSSR
4.3.3. Security Analysis of the Operating Points
5. Convex Region Case Study
5.1. Overview of the Case
5.2. Solution of the DSSR
5.3. Error Analysis
5.3.1. Area of the DSSR
5.3.2. Shape of the DSSR
- (1)
- The lenient convergence condition for the AC power flow model. For example, convergence condition in the case is
- (2)
- The application of the DC power flow model.
5.3.3. Security Analysis of the Operating Points
5.4. Error Reduction Measures
- (1)
- The point-sampling interval is changed from 0.2 MVA to 0.05 MVA, increasing the number of input points from 17 to 179.
- (2)
- The convergence condition is modified to
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DSSR | Distribution System Security Region |
| DG | Distributed Generator |
| IES | Integrated Energy System |
| AC | Alternating Current |
| DC | Direct Current |
| 2D | Two-Dimensional |
| 3D | Three-Dimensional |
| N − 0 | Security Criterion for Normal Operation |
| N − 1 | Security Criterion for Single Component Contingency |
Nomenclature
| Variables | Sets | ||
| cB,n | Capacity of feeder n | A | A point set |
| Si | Apparent power of component i | C | Convex hull of the point set |
| SL,i | Power of load i | L | The load set |
| SDG,i | Power of DG i | G | The DG set |
| Si,max | Upper limit power of component i | X | The secure operating point set |
| STr,m,n | Load transfer from m to n | Θ | State space |
| Wi | Operating point i | Ω | Space of the DSSR |
| xi | Secure operating point i | ΩDSSR,DC | DC power flow modeled DSSR |
| λ | A real number between zero and one | ||
| Others | |||
| Functions | Fi | The feeder i | |
| f(W) | Power balance formulas | △ | The triangle |
| g(W) | Security constraints | e | The convergence condition |
| convhull | Convex hull function in Matlab | A,B,C,… | Points in the DSSR image |
Appendix A
- (1)
- As SL3 increases from 0 to 1.5 MVA

- (2)
- As SL3 increases from 1.5 MVA to 3 MVA
Appendix B
References
- Xiao, J.; Gu, W.; Wang, C.; Li, F. Distribution system security region: Definition, model and security assessment. IET Gener. Transm. Distrib. 2012, 6, 1029–1035. [Google Scholar] [CrossRef]
- Saric, A.T.; Stankovic, A.M. Model uncertainty in security assessment of power systems. IEEE Trans. Power Syst. 2005, 20, 1398–1407. [Google Scholar] [CrossRef]
- Kalyani, S.; Swarup, K.S. Particle swarm optimization based K-means clustering approach for security assessment in power systems. Expert Syst. Appl. 2011, 38, 10839–10846. [Google Scholar] [CrossRef]
- Alimi, O.A.; Ouahada, K.; Abu-Mahfouz, A.M. A review of machine learning approaches to power system security and stability. IEEE Access 2020, 8, 113512–113531. [Google Scholar] [CrossRef]
- Yang, T.; Yu, Y. Static voltage security region-based coordinated voltage control in smart distribution grids. IEEE Trans. Smart Grid 2017, 9, 5494–5502. [Google Scholar] [CrossRef]
- Yang, T.; Yu, Y. Steady-state security region-based voltage/var optimization considering power injection uncertainties in distribution grids. IEEE Trans. Smart Grid 2018, 10, 2904–2911. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Q.; Xia, Q.; Kang, C. Steady-state security assessment method based on distance to security region boundaries. IET Gener. Transm. Distrib. 2013, 7, 288–297. [Google Scholar] [CrossRef]
- Sun, B.; Li, Y.; Zeng, Y.; Chen, J.; Shi, J. Optimization planning method of distributed generation based on steady-state security region of distribution network. Energy Rep. 2022, 8, 4209–4222. [Google Scholar] [CrossRef]
- Ding, T.; Bo, R.; Sun, H.; Li, F.; Guo, Q. A robust two-level coordinated static voltage security region for centrally integrated wind farms. IEEE Trans. Smart Grid 2015, 7, 460–470. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, R.; Li, X.; Chen, H.; Li, G. Integrated energy system security region: Concepts, methods, and implementations. Appl. Energ. 2021, 283, 116124. [Google Scholar] [CrossRef]
- Xiao, H.; Ye, Z.; Ma, F.; Ji, F. Calculation and analysis of the safe operation boundary of shipboard DC zonal electric distribution system. Trans. China Electr. Soc. 2016, 31, 202–208. [Google Scholar] [CrossRef]
- Xiao, J.; Zu, G.; Zhou, H.; Zhang, X. Total quadrant security region for active distribution network with high penetration of distributed generation. J. Mod. Power Syst. Clean Energy 2021, 9, 128–137. [Google Scholar] [CrossRef]
- Xiao, J.; Zhang, S.; Qiu, Z.; Song, C.; Jiao, H.; She, B. Geometric property of distribution system security region: Size and shape. Electr. Power Syst. Res. 2022, 210, 108106. [Google Scholar] [CrossRef]
- Xiao, J.; Song, C.; Jiao, H.; Li, Z.; Li, J.; Li, C. Stability modeling and solution for security region of integrated energy system based on energy circuit. Autom. Electr. Power Syst. 2023, 47, 53–63. [Google Scholar] [CrossRef]
- Song, C.; Xiao, J.; Qiu, Z.; Jiao, H.; Qu, Y. Steady state model of security region for natural gas network based on unified modeling method of heterogeneous energy. Autom. Electr. Power Syst. 2022, 46, 13–22. [Google Scholar] [CrossRef]
- Huang, Z.; Wu, Z.; Yan, H. A convex-hull based method with manifold projections for detecting cell protrusions. Comput. Biol. Med. 2024, 173, 108350. [Google Scholar] [CrossRef]
- Yi, K.; Sun, L.; Ding, J.; Ding, M. Load restoration scheme optimization for power system with wind power based on convex hull theory. Autom. Electr. Power Syst. 2024, 48, 77–87. [Google Scholar] [CrossRef]
- Lei, C.; Bu, S.; Zhong, J.; Chen, Q.; Wang, Q. Distribution network reconfiguration: A disjunctive convex hull approach. IEEE Trans. Power Syst. 2023, 38, 5926–5929. [Google Scholar] [CrossRef]
- Pei, L.; Wei, Z.; Chen, S.; Sun, G.; Lyu, S. Convex hull based security region for AC/DC hybrid distribution networks. Autom. Electr. Power Syst. 2021, 45, 45–51. [Google Scholar] [CrossRef]
- Pei, L.; Wei, Z.; Chen, S.; Zhao, J.; Yin, H. Security region of variable photovoltaic generation in AC-DC hybrid distribution power networks. Power Syst. Technol. 2021, 45, 4084–4093. [Google Scholar] [CrossRef]
- Chen, S.; Wei, Z.; Sun, G.; Wei, W.; Wang, D. Convex hull based robust security region for electricity-gas integrated energy systems. IEEE Trans. Power Syst. 2018, 34, 1740–1748. [Google Scholar] [CrossRef]
- Xiao, J.; Jiao, H.; Qu, Y.; She, B. Special two-dimensional images of distribution system security region: Discovery, Mechanism and Application. Proc. CSEE 2020, 40, 5088–5102. [Google Scholar] [CrossRef]
- Xiao, J.; Jiao, H.; Song, C.; Qiu, Z.; Bao, Z. New Images of Map for Distribution System Security Region. In Proceedings of the 2022 IEEE Power & Energy Society General Meeting (PESGM), Denver, CO, USA, 17–21 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Xiao, J.; Cao, Y.; Zhang, B. Concavity and convexity of distribution system security region: Theorem, Proof and Determination Algorithm. Proc. CSEE 2021, 41, 5153–5167. [Google Scholar] [CrossRef]
- Jiao, H.; Lin, X.; Xiao, J.; Zu, G.; Song, C.; Qiu, Z.; Bao, Z.; Zhou, C. Concavity-convexity of distribution system security region. Part I: Observation results and mechanism. Appl. Energ. 2023, 342, 121169. [Google Scholar] [CrossRef]
- Jiao, H.; Xiao, J.; Zu, G.; Song, C.; Lv, Z.; Bao, Z.; Qiu, Z. Concavity-convexity of distribution system security region. Part II: Mathematical principle, judgment, and application. Appl. Energ. 2024, 361, 122888. [Google Scholar] [CrossRef]
- Xiao, J.; Wang, C.; She, B.; Li, F.; Bao, Z.; Zhang, X. Total supply and accommodation capability curves for active distribution networks: Concept and model. Int. J. Elec. Power 2021, 133, 107279. [Google Scholar] [CrossRef]
- Niestegge, G. Quantum transition probability in convex sets and self-dual cones. Proc. R. Soc. A 2024, 480, 20230941. [Google Scholar] [CrossRef]
- Wei, L.; Atamtürk, A.; Gómez, A.; Küçükyavuz, S. On the convex hull of convex quadratic optimization problems with indicators. Math. Program. 2024, 204, 703–737. [Google Scholar] [CrossRef]
- Gamby, A.N.; Katajainen, J. Convex-hull algorithms: Implementation, testing, and experimentation. Algorithms 2018, 11, 195. [Google Scholar] [CrossRef]
- Sivakumar, V.L.; Ramkumar, K.; Vidhya, K.; Gobinathan, B.; Gietahun, Y.W. A comparative analysis of methods of endmember selection for use in subpixel classification: A convex hull approach. Comput. Intel. Neurosc. 2022, 2022, 3770871. [Google Scholar] [CrossRef]
- Alshamrani, R.; Alshehri, F.; Kurdi, H. A preprocessing technique for fast convex hull computation. Procedia Comput. Sci. 2020, 170, 317–324. [Google Scholar] [CrossRef]
- Kwon, H.; Oh, S.; Baek, J.W. Algorithmic efficiency in convex hull computation: Insights from 2d and 3d implementations. Symmetry 2024, 16, 1590. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Method | Area of the DSSR [MVA2] | Area Error [MVA2] | Relative Error [%] |
|---|---|---|---|---|
| Scenario 1 | Analytical method | 5 | 0 | 0 |
| Convex hull method | 6 | 1 | 20 | |
| Scenario 2 | Analytical method | 4 | 0 | 0 |
| Convex hull method | 4.5 | 0.5 | 12.5 |
| Scenario | Method | Shape of the DSSR | Shape Deviation |
|---|---|---|---|
| Scenario 1 | Analytical method | Non-convex hexagon OABCDE 1 | None |
| Convex hull method | Convex quadrilateral OACE 1 | △ABC, △CDE 1 | |
| Scenario 2 | Analytical method | Non-convex hexagon OABCDE 2 | None |
| Convex hull method | △OAE 2 | △BCD 2 |
| Scenario | Method | Critical Secure Operating Points | Overlimit Power Flow [%] |
|---|---|---|---|
| Scenario 1 | Analytical method | (1,2), (2,1) | 0 |
| Convex hull method | (1.2,2.4), (2.4,1.2) | 20 | |
| Scenario 2 | Analytical method | (1,1) | 0 |
| Convex hull method | (1.5,1.5) | 50 |
| Method | Area of the DSSR [MVA2] | Area Error [MVA2] | Relative Error [%] |
|---|---|---|---|
| Analytical method | 0.38 | 0 | 0 |
| Convex hull method | 0.38 | 0.1 | 13.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, J.; Wang, L.; Zhou, Y. Error Analysis of the Convex Hull Method for the Solution of the Distribution System Security Region. Energies 2025, 18, 2327. https://doi.org/10.3390/en18092327
Xiao J, Wang L, Zhou Y. Error Analysis of the Convex Hull Method for the Solution of the Distribution System Security Region. Energies. 2025; 18(9):2327. https://doi.org/10.3390/en18092327
Chicago/Turabian StyleXiao, Jun, Lixing Wang, and Yupeng Zhou. 2025. "Error Analysis of the Convex Hull Method for the Solution of the Distribution System Security Region" Energies 18, no. 9: 2327. https://doi.org/10.3390/en18092327
APA StyleXiao, J., Wang, L., & Zhou, Y. (2025). Error Analysis of the Convex Hull Method for the Solution of the Distribution System Security Region. Energies, 18(9), 2327. https://doi.org/10.3390/en18092327