
Analytical Diagnostic and Control System of Energy and Mechanical Efficiency of Electric Drives


Abstract
1. Introduction
- (1)
- (2)
- (3)
- Malfunctions of the control system. Malfunctions of sensors, controllers, and other control system elements due to damage or incorrect settings. Software and control algorithm failures [21].
- (4)
- External factors. Environmental effects, such as dust, moisture, temperature, and vibrations. Improper operation and maintenance of the drive [22].Reduced efficiency of the electric drive can take the following forms [23]:
- (1)
- A decrease in power and torque of the electric drive motor.
- (2)
- Increased power consumption.
- (3)
- A decrease in the accuracy and stability of motion control.
- (4)
- Deterioration of the electric drive dynamic characteristics.
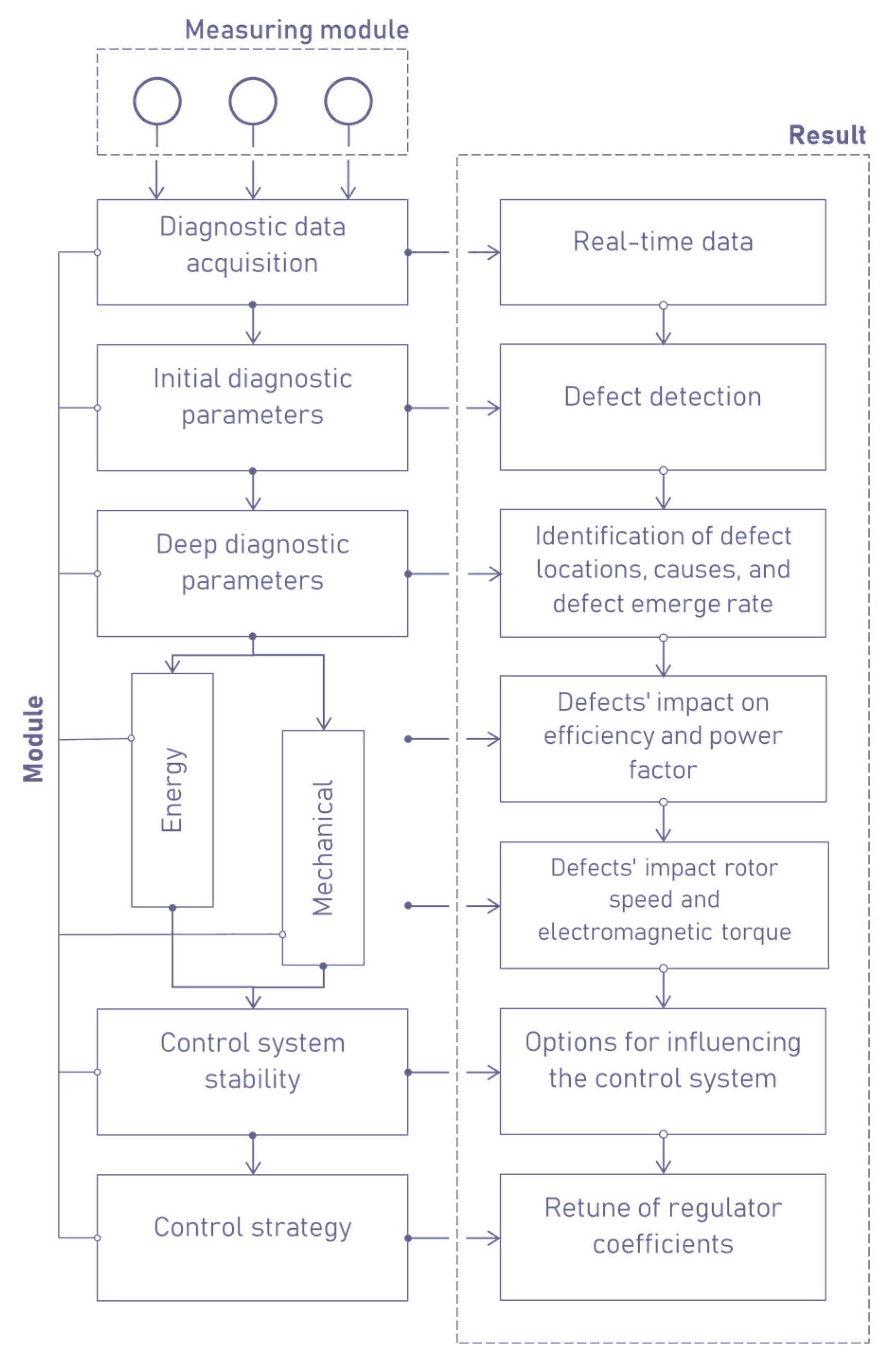
2. Materials and Methods
- (1)
- Diagnostic data acquisition;
- (2)
- Initial diagnostic parameters calculation;
- (3)
- Deep diagnostic parameter calculation;
- (4)
- Evaluation of energy efficiency;
- (5)
- Evaluation of mechanical efficiency;
- (6)
- Control system stability;
- (7)
- Control strategy.
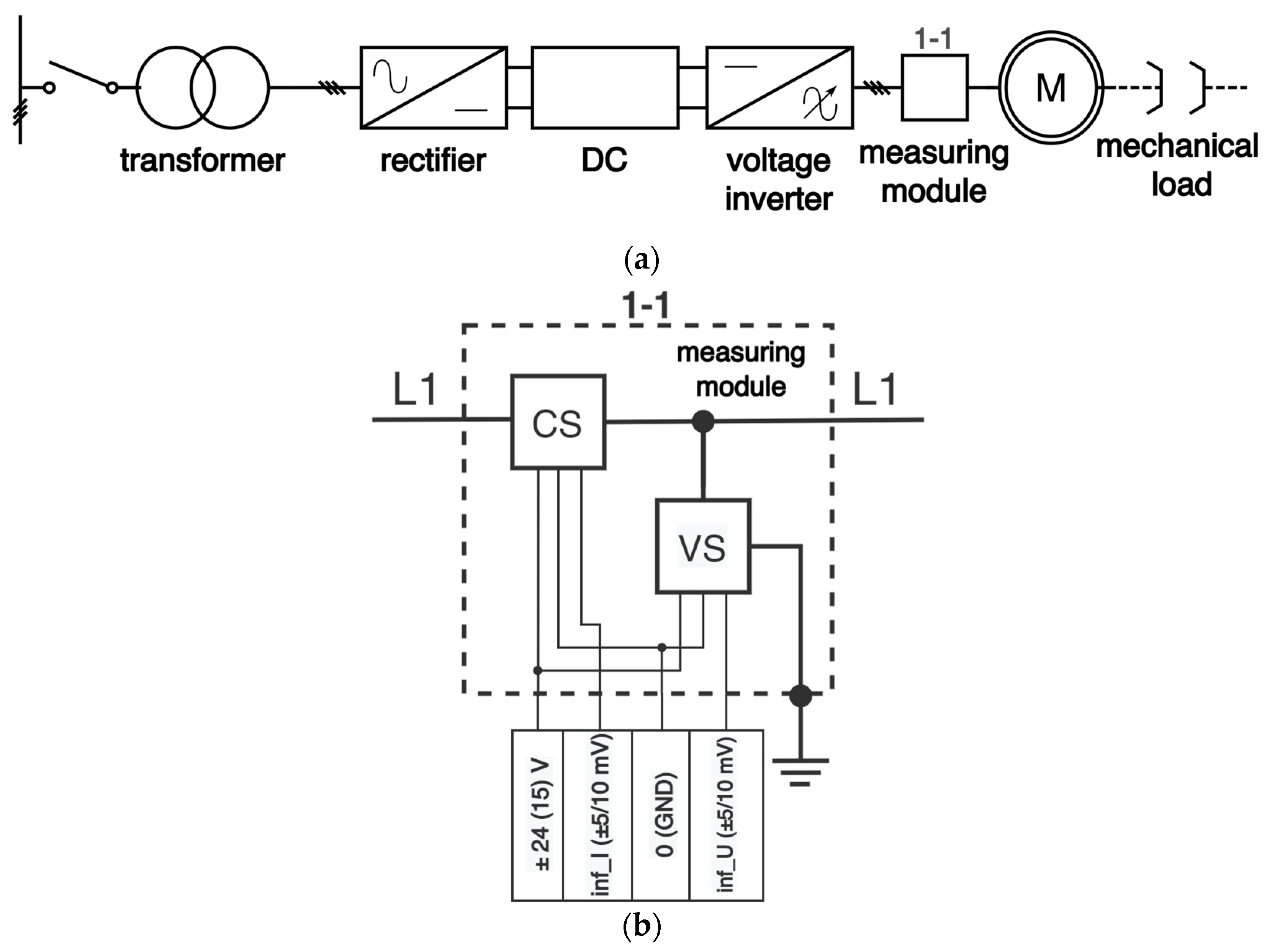
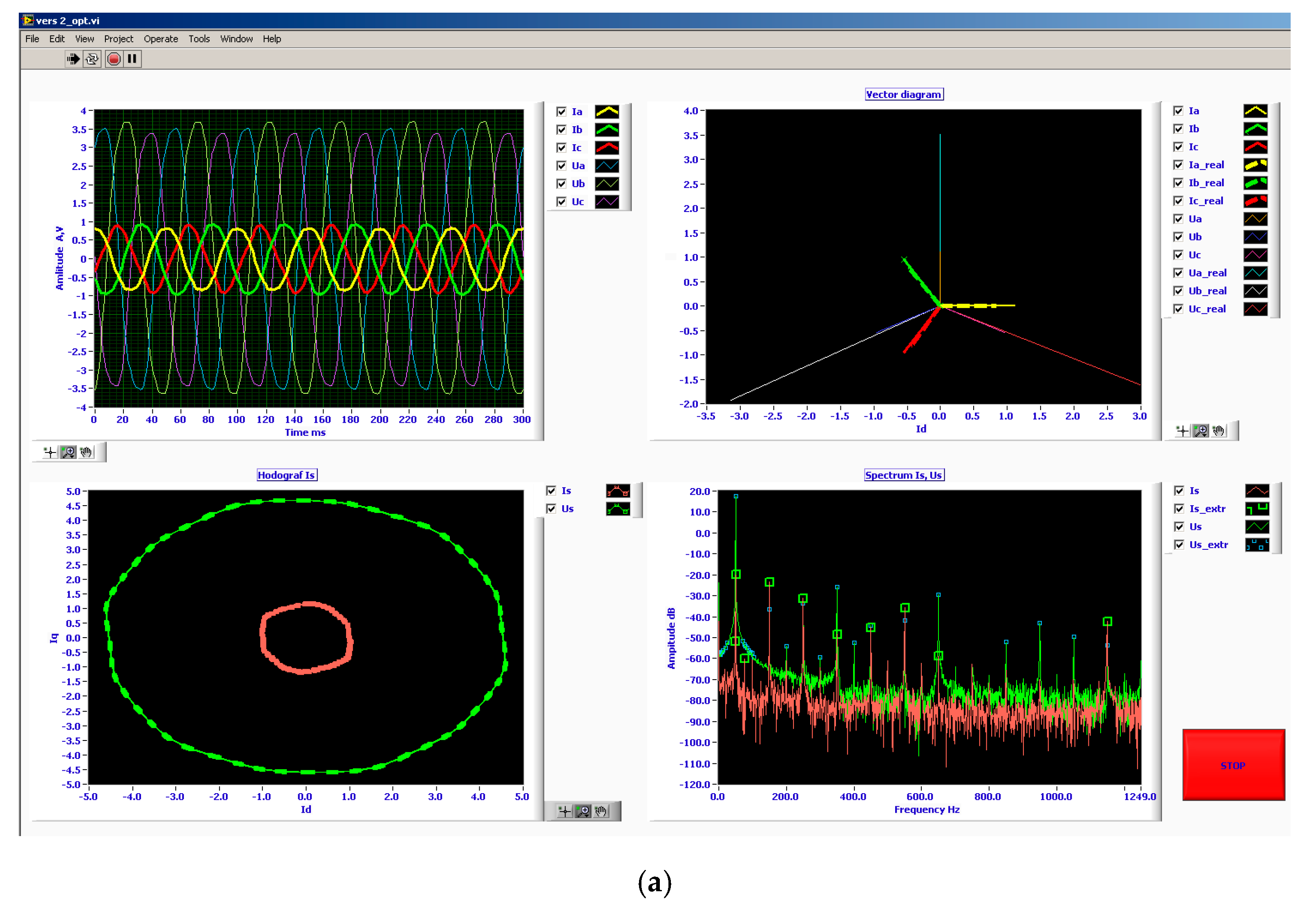
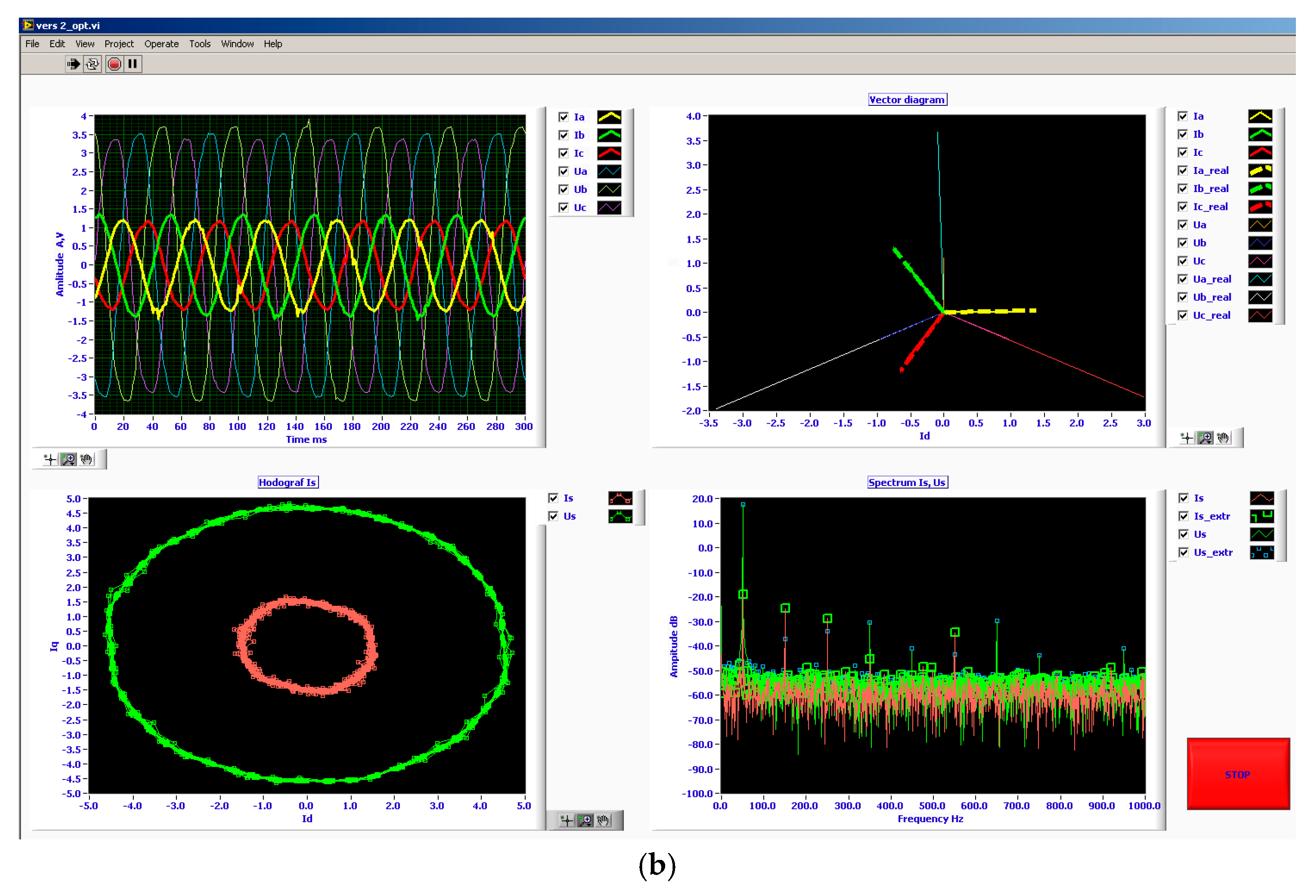
2.1. Measuring Module
2.2. Calculation Module of Primary Diagnostic Parameters
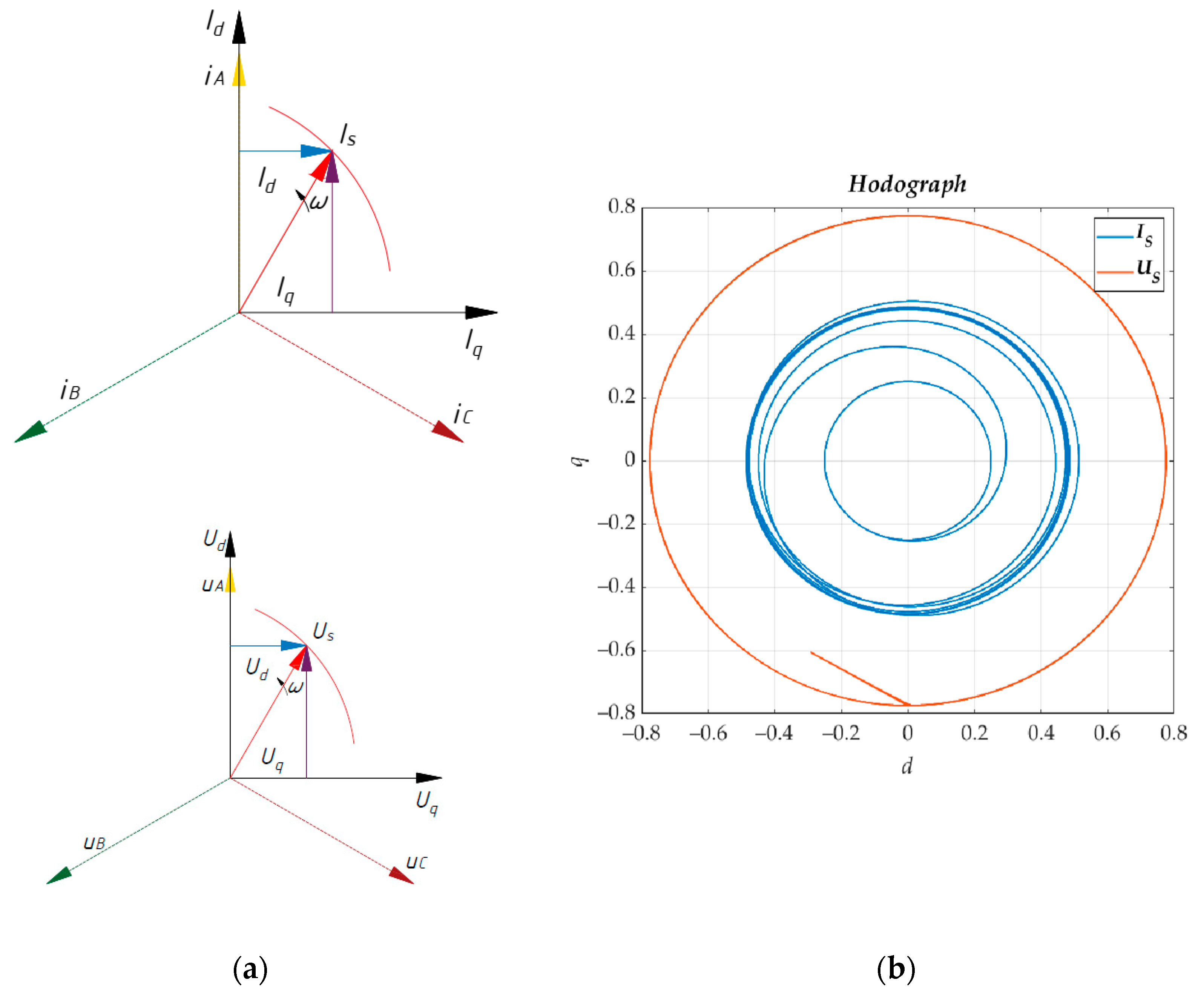
- Ud, Uq, Id, Iq—voltage and currents consumed by an AC motor in the 2-phase rotating coordinate system, dq;
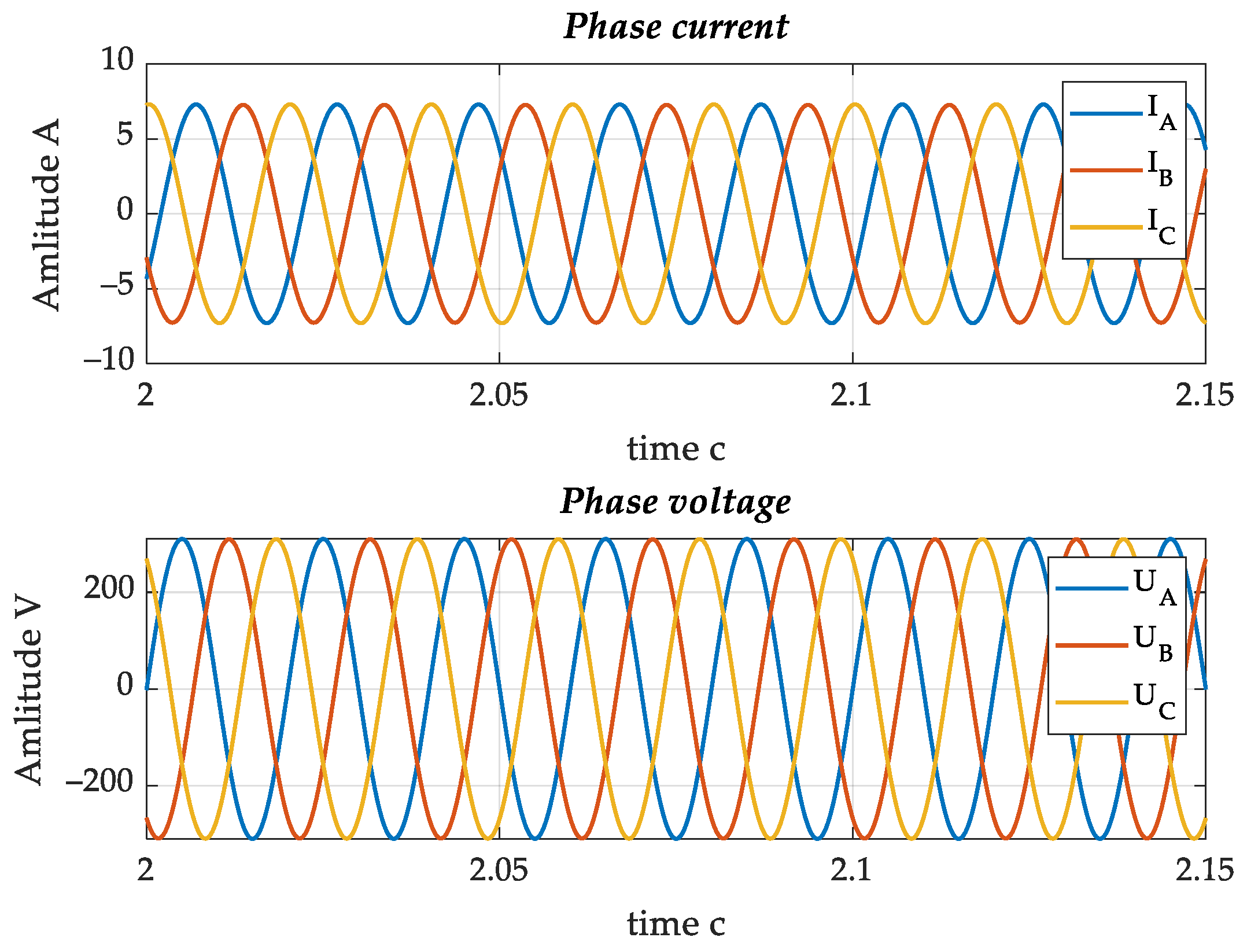
- uA, uB, uC, iA, iB, iC—voltage and currents consumed by an AC motor in the 3-phase rotating coordinate system, ABC.
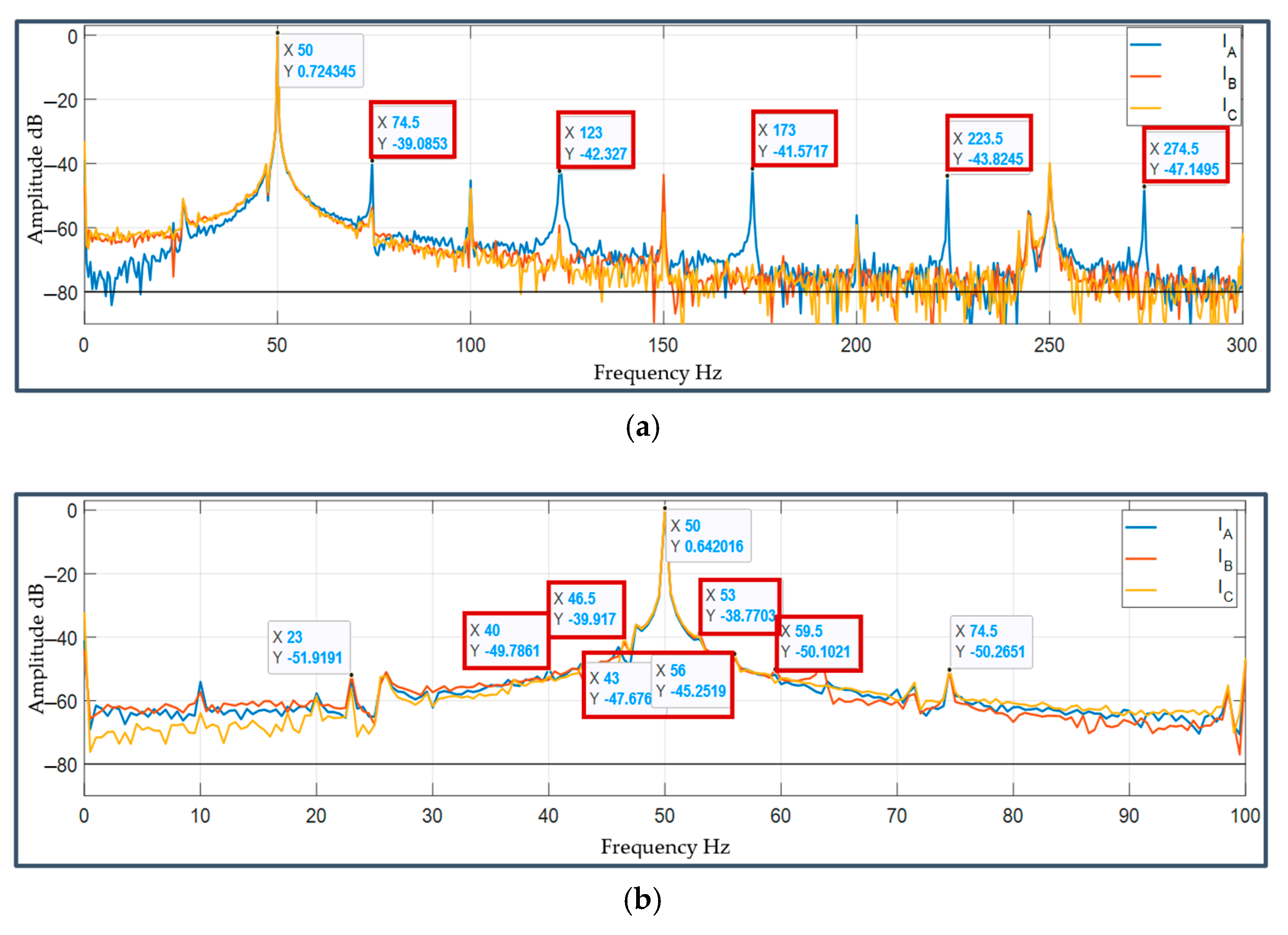
2.3. Calculation Module of Deep Diagnostic Parameters
2.4. Energy Efficiency Assessment Module
- (1)
- An efficiency factor (7).
- (2)
- A power factor including harmonic distortion of signals introduced by the semiconductor frequency converter (8).
- —mechanical power at the drive shaft;
- —electrical power capacity consumed from the supply network by the electric drive;
- —current sinusoidality factor current;
- —voltage sinusoidality factor.
2.5. Mechanical Efficiency Evaluation Module
- —electromagnetic torque components generated as a result of stator current harmonic interaction;
- —average value of electromagnetic torque of induction drive.
2.6. Module for Assessing the General Technical Condition of the Electric Drive
- —weighting functions based on the assessment of energy and mechanical efficiency;
- —condition level of a single point: stator, rotor, shaft, or bearings.
2.7. Module for Assessing Control System Stability
2.8. Control Strategy Selection Module
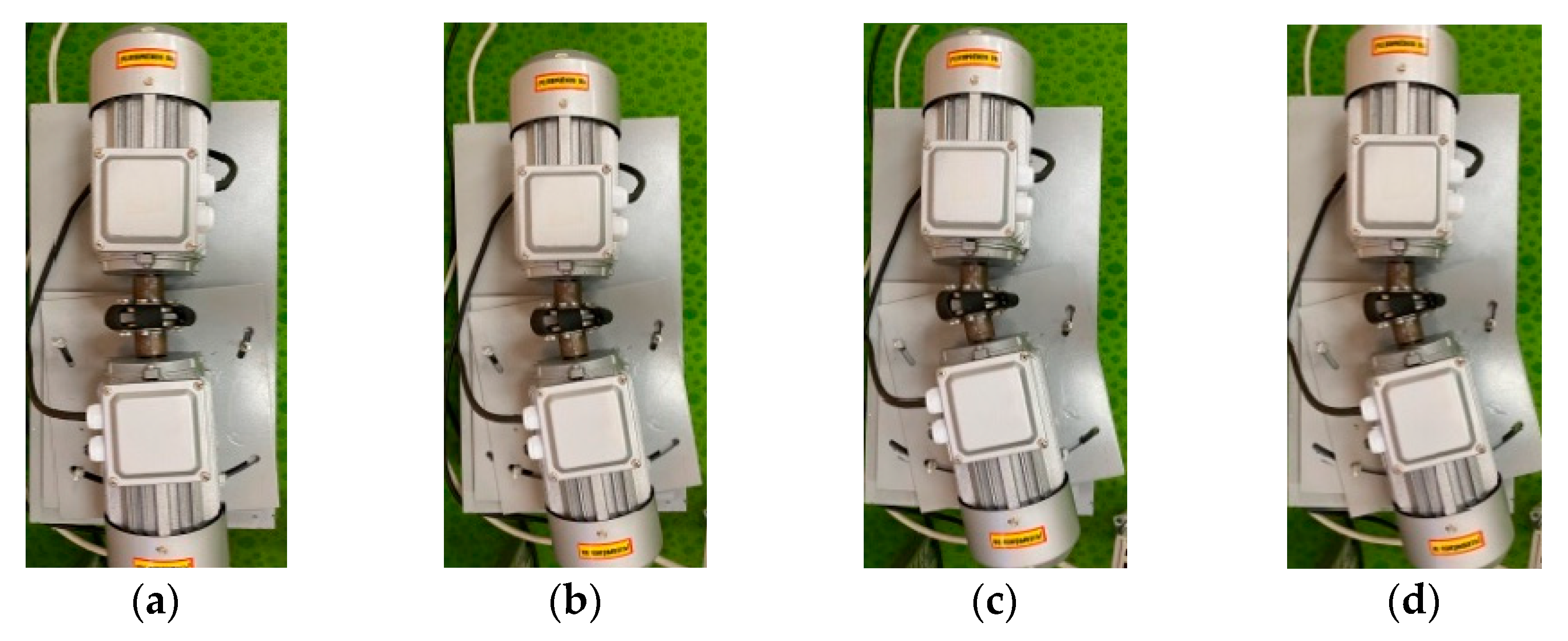
3. Results and Discussion
- (1)
- A power supply panel (voltage level 380/220 V);
- (2)
- A frequency converter (ATV900 Schneider Electric) with a process level controller (M340) scalar control system with speed feedback;
- (3)
- An ADC with a wide frequency response resolution (National instruments PXI-6251);
- (4)
- A measurement module connection diagram;
- (5)
- Test and load induction drives (power 1.5 kW and speed 1390 rpm);
- (6)
- A measurement board prototype.
4. Conclusions
- (1)
- Installation of the measuring module does not require any additional modifications provided that the supply network is not interrupted or disconnected.
- (2)
- The analysis of generalised current and voltage vectors enables the distinction between distortions introduced by the electrical network and the diagnostic features of the drive.
- (3)
- A comprehensive list of defect types has been identified, and their negative impact on energy and mechanical characteristics has been evaluated.
- (4)
- The technical state of the drive is assessed using a corresponding index, thus facilitating more efficient and timely maintenance, repair, and control work.
- (5)
- A mathematical model of the electric drive has been performed using the current parameters of the substitution diagram. All possible control options are modelled simultaneously.
- (6)
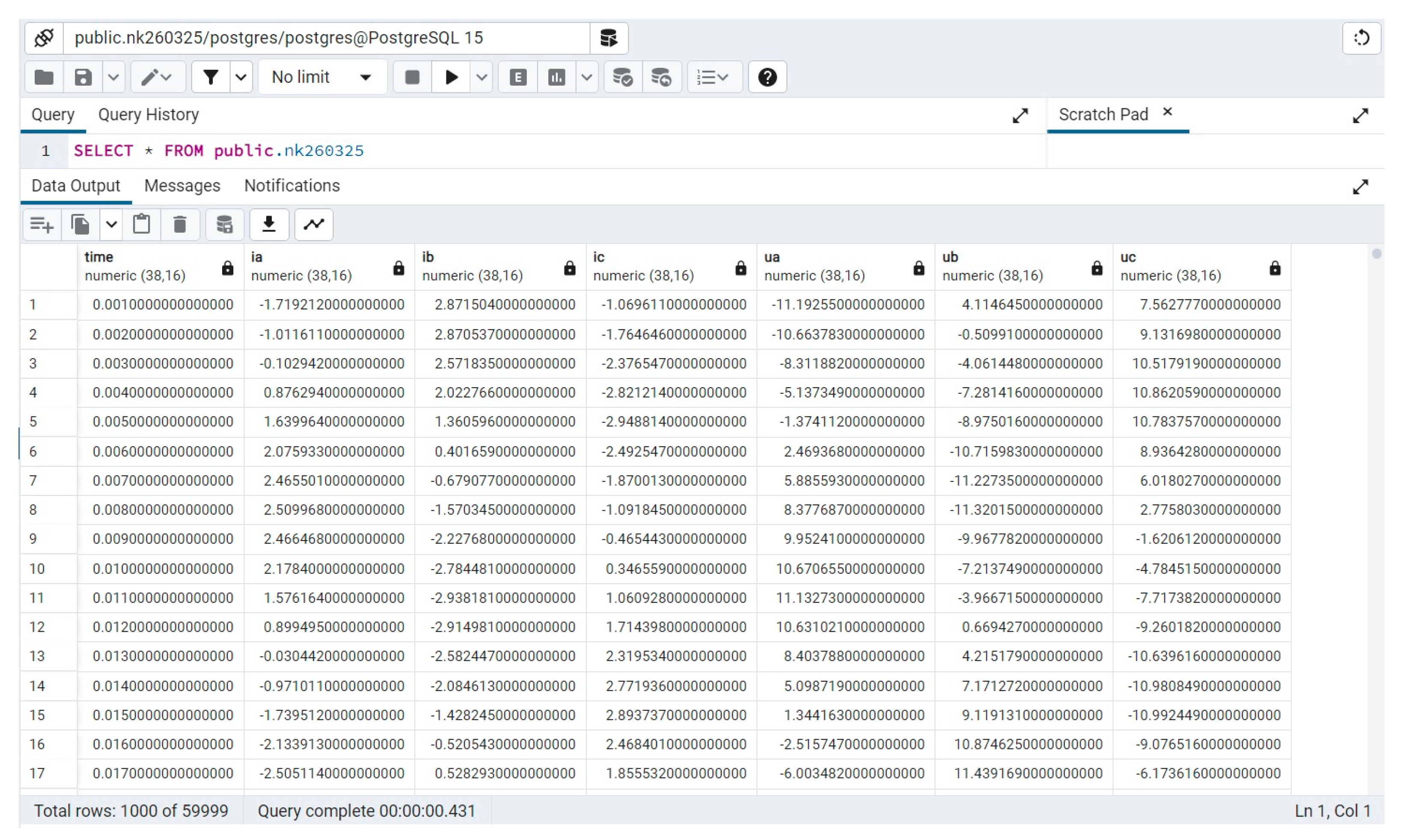
- The electronic measuring device is used for real-time collection and analysis of diagnostic data from electric drives.
- (7)
- The effective control of individual and groups of drives is of key importance in minimising energy and economic costs. Such control is achieved by the prevention of unforeseen plant downtime and emergencies.
5. Patents
Funding
Data Availability Statement
Conflicts of Interest
References
- Nikolaev, A.V.; Vöth, S.; Kychkin, A.V. Application of the cybernetic approach to price-dependent demand response for underground mining enterprise electricity consumption. J. Min. Inst. 2023, 261, 403–414. [Google Scholar] [CrossRef]
- Zhukovskiy, Y.L.; Suslikov, P.K. Assessment of the potential effect of applying demand management technology at mining enterprises. Sustain. Dev. Mt. Territ. 2024, 16, 895–908. [Google Scholar] [CrossRef]
- Pavel, T.; Polina, S.; Liubov, N. The research of the impact of energy efficiency on mitigating greenhouse gas emissions at the national level. Energy Convers. Manag. 2024, 314, 118671. [Google Scholar] [CrossRef]
- Mseddi, A.; Dhouib, B.; Zdiri, M.A.; Alaas, Z.; Naifar, O.; Guesmi, T.; Alshammari, B.A.; Alqunun, K. Exploring the Potential of Hybrid Excitation Synchronous Generators in Wind Energy: A Comprehensive Analysis and Overview. Processes 2024, 12, 1186. [Google Scholar] [CrossRef]
- Shpenst, V.A.; Belsky, A.A.; Orel, E.A. Improving the efficiency of autonomous electrical complex with renewable energy sources by means of adaptive regulation of its operating modes. J. Min. Inst. 2023, 261, 479–492. [Google Scholar]
- Monteiro, J.; Sousa, N.; Coutinho-Rodrigues, J.; Natividade-Jesus, E. Challenges ahead for sustainable cities: An urban form and transport system review. Energies 2024, 17, 409. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Z.; Liu, Y.; Xu, Z.; Qu, X. A review of machine learning approaches for electric vehicle energy consumption modelling in urban transportation. Renew. Energy 2024, 234, 121243. [Google Scholar] [CrossRef]
- Uy, J.R.R.; Ong, A.K.S.; German, J.D. Marketing strategy and preference analysis of electric cars in a developing country: A perspective from the Philippines. World Electr. Veh. J. 2024, 15, 111. [Google Scholar] [CrossRef]
- Behnia, F.; Schuelke-Leech, B.A.; Mirhassani, M. Optimizing sustainable urban mobility: A comprehensive review of electric bus scheduling strategies and future directions. Sustain. Cities Soc. 2024, 108, 105497. [Google Scholar] [CrossRef]
- Petrov, V.L.; Pichuev, A.V. Assessing the efficiency of measures to enhance electric power quality in variable-frequency drive for scraper conveyors. Min. Sci. Technol. 2024, 9, 60–69. [Google Scholar] [CrossRef]
- Jin, H.; Huo, H.; Wang, C.; Wang, S.; Xu, H. Design and experimental study of electrical and mechanical brake for mine hoist. Mech. Ind. 2021, 22, 36. [Google Scholar]
- Malafeev, S.I. Electric Drive for Opening the Bottom of an Excavator Bucket: Design and Analysis of the Control System. Russ. Electr. Eng. 2023, 94, 223–227. [Google Scholar] [CrossRef]
- Ahmadi Khiyavi, O.; Seo, J.; Lin, X. New design of an electrical excavator and its path generation for energy saving and obstacle avoidance. Vehicles 2024, 6, 832–849. [Google Scholar] [CrossRef]
- Koteleva, N.; Valnev, V. Automatic Detection of Maintenance Scenarios for Equipment and Control Systems in Industry. Appl. Sci. 2023, 13, 12997. [Google Scholar] [CrossRef]
- Yurievich, V.B.; Hien, N.T. Stochastic Pulse-Width Modulation and Modification of Direct Torque Control Based on a Three-Level Neutral-Point Clamped Inverter. Energies 2024, 17, 6017. [Google Scholar] [CrossRef]
- Shklyarskiy, Y.E.; Guerra, D.D.; Iakovleva, E.V.; Rassõlkin, A. The influence of solar energy on the development of the mining industry in the Republic of Cuba. J. Min. Inst. 2021, 249, 427–440. [Google Scholar] [CrossRef]
- Shishlyannikov, D.; Zverev, V.; Ivanchenko, A.; Zvonarev, I. Increasing the Time between Failures of Electric Submersible Pumps for Oil Production with High Content of Mechanical Impurities. Appl. Sci. 2022, 12, 64. [Google Scholar] [CrossRef]
- He, F.; Xie, G.; Luo, J. Electrical bearing failures in electric vehicles. Friction 2020, 8, 4–28. [Google Scholar] [CrossRef]
- Zafarani, M.; Goktas, T.; Akin, B. A comprehensive magnet defect fault analysis of permanent-magnet synchronous motors. IEEE Trans. Ind. Appl. 2015, 5, 1331–1339. [Google Scholar]
- Campean, E.; Serban, C.A.; Ciupan, M.; Pop, G. Detecting Motor Defects Using Noise Analysis. In International Scientific-Technical Conference Manufacturing; Springer Nature: Cham, Switzerland, 2024; pp. 122–132. [Google Scholar]
- Hölsch, L.; Brosch, A.; Steckel, R.; Braun, T.; Wendel, S.; Böcker, J.; Wallscheid, O. Insights and challenges of co-simulation-based optimal pulse pattern evaluation for electric drives. IEEE Trans. Energy Convers. 2024, 39, 2094–2105. [Google Scholar] [CrossRef]
- Habyarimana, M.; Adebiyi, A.A. A Review of Artificial Intelligence Applications in Predicting Faults in Electrical Machines. Energies 2025, 18, 1616. [Google Scholar] [CrossRef]
- Wróblewski, A.; Krot, P.; Zimroz, R.; Mayer, T.; Peltola, J. Review of linear electric motor hammers—An energy-saving and eco-friendly solution in industry. Energies. 2023, 16, 959. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, L.; Lu, C. Exploration of the characteristics and trends of electric vehicle crashes: A case study in Norway. Eur. Transp. Res. Rev. 2022, 14, 6. [Google Scholar] [CrossRef]
- Duarte, J.; Marques, A.T.; Santos Baptista, J. Occupational accidents related to heavy machinery: A systematic review. Safety 2021, 7, 21. [Google Scholar] [CrossRef]
- Wasim, M.; Djukic, M.B. External corrosion of oil and gas pipelines: A review of failure mechanisms and predictive preventions. J. Nat. Gas Sci. Eng. 2022, 100, 104467. [Google Scholar] [CrossRef]
- Babyr, K.V.; Ustinov, D.A.; Pelenev, D.N. Improving electrical safety of the maintenance personnel in the conditions of incomplete single-phase ground faults. Occup. Saf. Ind. 2022, 8, 55–61. [Google Scholar] [CrossRef]
- See, K.W.; Wang, G.; Zhang, Y.; Wang, Y.; Meng, L.; Gu, X.; Xie, B. Critical review and functional safety of a battery management system for large-scale lithium-ion battery pack technologies. Int. J. Coal Sci. Technol. 2022, 9, 36. [Google Scholar] [CrossRef]
- Liang, J.; Feng, J.; Fang, Z.; Lu, Y.; Yin, G.; Mao, X.; Wang, F. An energy-oriented torque-vector control framework for distributed drive electric vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 4014–4031. [Google Scholar] [CrossRef]
- Bonnett, A.H.; Yung, C. Increased efficiency versus increased reliability. IEEE Ind. Appl. Mag. 2008, 14, 29–36. [Google Scholar] [CrossRef]
- Ferreira, F.J.T.E.; Baoming, G.; de Almeida, A.T. Reliability and operation of high-efficiency induction motors. In Proceedings of the 2015 IEEE/IAS 51st Industrial & Commercial Power Systems Technical Conference (I&CPS), Calgary, AB, Canada, 5–8 May 2015; pp. 1–13. [Google Scholar] [CrossRef]
- Teng, W.; Ding, X.; Tang, S.; Xu, J.; Shi, B.; Liu, Y. Vibration analysis for fault detection of wind turbine drivetrains—A comprehensive investigation. Sensors 2021, 21, 1686. [Google Scholar] [CrossRef]
- Kirchgässner, W.; Wallscheid, O.; Böcker, J. Data-driven permanent magnet temperature estimation in synchronous motors with supervised machine learning: A benchmark. IEEE Trans. Energy Convers. 2021, 36, 2059–2067. [Google Scholar] [CrossRef]
- Gherabi, Z.; Toumi, D.; Benouzza, N.; Boudinar, A.H.; Koura, M.B. Discrimination between demagnetization and eccentricity faults in PMSMs using real and imaginary components of stator current spectral analysis. J. Power Electron. 2021, 21, 153–163. [Google Scholar] [CrossRef]
- Skamyin, A. Method for determining the harmonic contribution of consumer installations based on the application of passive filters. IET Gener. Transm. Distrib. 2024, 18, 2464–2479. [Google Scholar] [CrossRef]
- Kudelina, K.; Vaimann, T.; Asad, B.; Rassõlkin, A.; Kallaste, A.; Demidova, G. Trends and challenges in intelligent condition monitoring of electrical machines using machine learning. Appl. Sci. 2021, 11, 2761. [Google Scholar] [CrossRef]
- Mohd Ghazali, M.H.; Rahiman, W. Vibration analysis for machine monitoring and diagnosis: A systematic review. Shock. Vib. 2021, 2021, 9469318. [Google Scholar] [CrossRef]
- Errigo, A.; Choi, J.K.; Kissock, K. Techno-economic-environmental impacts of industrial energy assessment: Sustainable industrial motor systems of small and medium-sized enterprises. Sustain. Energy Technol. Assess. 2022, 49, 101694. [Google Scholar] [CrossRef]
- RJunior, R.F.R.; dos Santos Areias, I.A.; Campos, M.M.; Teixeira, C.E.; da Silva, L.E.B.; Gomes, G.F. Fault detection and diagnosis in electric motors using 1d convolutional neural networks with multi-channel vibration signals. Measurement 2022, 190, 110759. [Google Scholar] [CrossRef]
- Duda, A.; Drozdowski, P. Induction Motor Fault Diagnosis Based on Zero-Sequence Current Analysis. Energies 2020, 13, 6528. [Google Scholar] [CrossRef]
- Andreev, D.A.; Nazarychev, A.N.; Folvarchuk, A.S. Methods for Reducing Short-Circuit Currents in the Generator Circuit When Designing High-Power Units in Nuclear Power Plants. Power Technol. Eng. 2023, 56, 711–717. [Google Scholar] [CrossRef]
- Wang, Z.; Shi, D.; Xu, Y.; Zhen, D.; Gu, F.; Ball, A.D. Early rolling bearing fault diagnosis in induction motors based on on-rotor sensing vibrations. Measurement 2023, 222, 113614. [Google Scholar] [CrossRef]
- Zhukovsky, Y.L.; Babanova, I.S.; Korolev, N.A. Method for Diagnosing the Technical Condition and Assessing the Residual Life of an Electromechanical Unit with an Asynchronous Motor. Patent No. 2626231, 10 November 2016. [Google Scholar]
- Korolev, N.A.; Boykov, A.V. Certificate of State Registration Program for Computers No. 2023614972 Russian Federation. Program for Monitoring Diagnostic Data of Asynchronous Electric Drive by Current and Voltage; Applicant and Copyright Holder “Empress Catherine II Saint Petersburg Mining University”. Patent No. 2023613721, 9 March 2023. [Google Scholar]
- Korolev, N.A.; Koteleva, N.I. Certificate of State Registration Program for Computers No. 2024616314 Russian Federation. Program for Identifying Diagnostic Characteristics of AC Electric Drives in Real Time; Applicant and Copyright Holder “Empress Catherine II Saint Petersburg Mining University”. Patent No. 2024614818, 12 March 2024. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | Defect | Estimated Frequency | Variable |
|---|---|---|---|
| Stator | Turn-to-turn faults in stator windings | fd11 = f1∙(k∙z2∙(1 − s)/p ± n) | f1—fundamental harmonic, Hz; k—number of frequency component in the sideband, k = 1, 2, 3…; z2—rotor rod number; p—number of pole pairs; s—slip; n—odd integer, n = 1, 3, 5, 7…; r—odd integer, r = 1, 3, 5, 7… |
| Stator asymmetry | fd12 = f1∙(n∙(1 − s)/p ± r) | ||
| Rotor | Rotor rod breakage | fd21 = f1∙(1 ± 2∙k∙s) | f1—fundamental harmonic, Hz; s—slip; n—odd integer, n = 1, 3, 5, 7…; k—number of frequency component in the sideband, k = 1, 2, 3… |
| Stator asymmetry | fd22 = f1∙(n∙(1 − s) ± s) | ||
| Shaft | Static eccentricity of the air gap | fd31 = f1∙[(k∙R ± nd)∙(1 − s)/p ± v] | f1—fundamental harmonic, Hz; nd—dynamic order eccentricity nd = 1, 2, 3…; p—number of pole pairs; s—slip; R—number of rotor slots; v—order of stator time harmonics, v = 1, 3, 5, 7…; k—number of frequency component in the sideband, k = 1, 2, 3… |
| Dynamic eccentricity of air gap | fd32 = f1∙[k∙R (1 − s)/p ± v] | ||
| Bearing | Rolling element | fd41 = f1∙s∙nb/2∙[1 − (Db/Dc∙cosβ)2] | f1—fundamental harmonic, Hz; s—slip; nb—number of balls in the bearing; β—ball contact angle, degrees; Dc—diameter of ball centres circle, mm; Db—rolling element diameter, mm. |
| External ring | fd42 = f1∙s∙nb/2∙[1 + (Db/Dc∙cosβ] | ||
| Internal ring | fd43 = f1∙s∙nb/2∙[1− (Db/Dc∙cosβ]) |
| Technical Condition Index
| Technical Condition Feature | Operating Recommendations |
|---|---|---|
| 0 < ≤ 0.1 | Functional condition up to the defect threshold | Normal operation |
| 0.1 < ≤ 0.2 | Functional condition with deviations not affecting energy and mechanical characteristics | Normal operation with decreasing measuring interval |
| 0.2 < ≤ 0.4 | Partially faulty state with a defect affecting energy and mechanical characteristics | It is allowed with constant monitoring and implementation of preventive control algorithms |
| 0.4 < ≤ 1 | Faulty condition | Emergency stop |
| Indicator | Eccentricity Level % | |||
|---|---|---|---|---|
| 5 | 10 | 15 | 20 | |
| , rad/s | 6 | 7.6 | 10.4 | 12 |
| , N·m | 9.6 | 8.2 | 7.0 | 5.6 |
| 4.8 | 6.1 | 8.1 | 10.4 | |
| Technical Condition Index | Eccentricity Level % | |||
|---|---|---|---|---|
| 5 | 10 | 15 | 20 | |
| 0.08 | 0.12 | 0.16 | 0.21 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korolev, N. Analytical Diagnostic and Control System of Energy and Mechanical Efficiency of Electric Drives. Energies 2025, 18, 2266. https://doi.org/10.3390/en18092266
Korolev N. Analytical Diagnostic and Control System of Energy and Mechanical Efficiency of Electric Drives. Energies. 2025; 18(9):2266. https://doi.org/10.3390/en18092266
Chicago/Turabian StyleKorolev, Nikolay. 2025. "Analytical Diagnostic and Control System of Energy and Mechanical Efficiency of Electric Drives" Energies 18, no. 9: 2266. https://doi.org/10.3390/en18092266
APA StyleKorolev, N. (2025). Analytical Diagnostic and Control System of Energy and Mechanical Efficiency of Electric Drives. Energies, 18(9), 2266. https://doi.org/10.3390/en18092266