

Wide-Area Damping Control for Clustered Microgrids





Abstract
1. Introduction
2. Wide-Area Damping Control
3. Microgrid Clustering, Collaboration, and Control
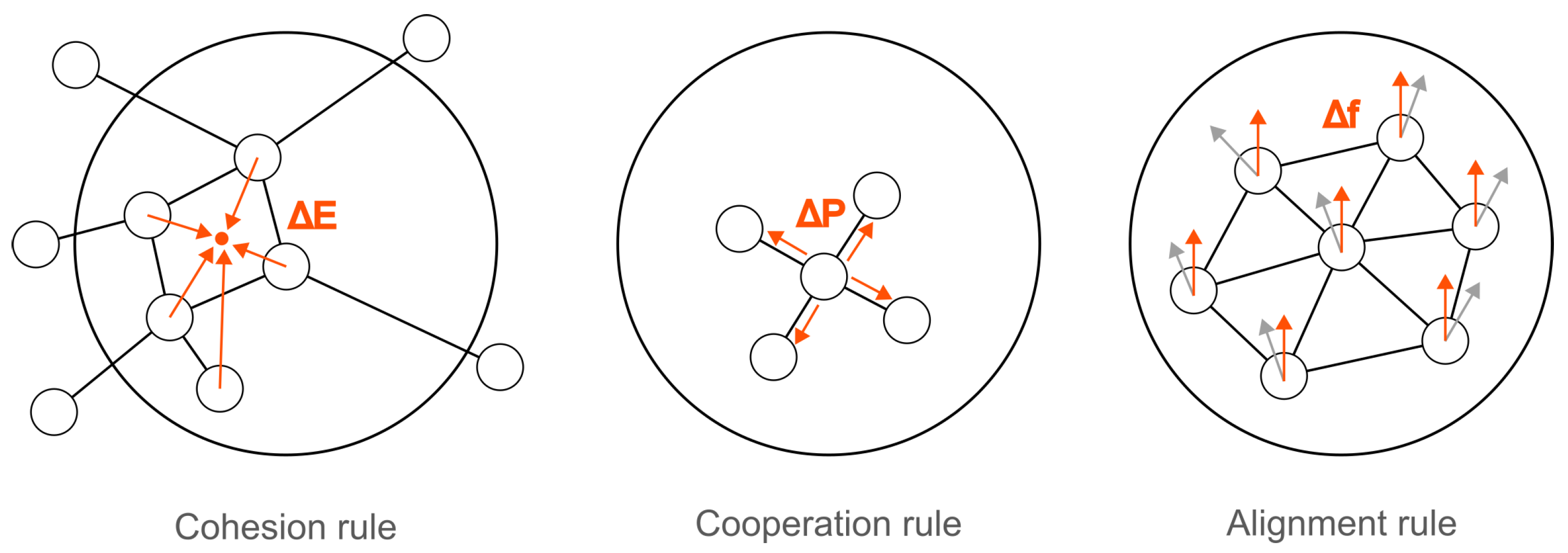
- Cohesion: Agents are guided to move towards the average position of their neighbors. The aim of this principle is to form and maintain group unity.
- Separation: Agents are guided to maintain a minimum distance from their neighbors. The aim of this principle it to avoid collisions or overlaps.
- Alignment: Agents are guided to steer towards the average direction or velocity of their neighbors. The aim of this principle is to achieve a coordinated movement.
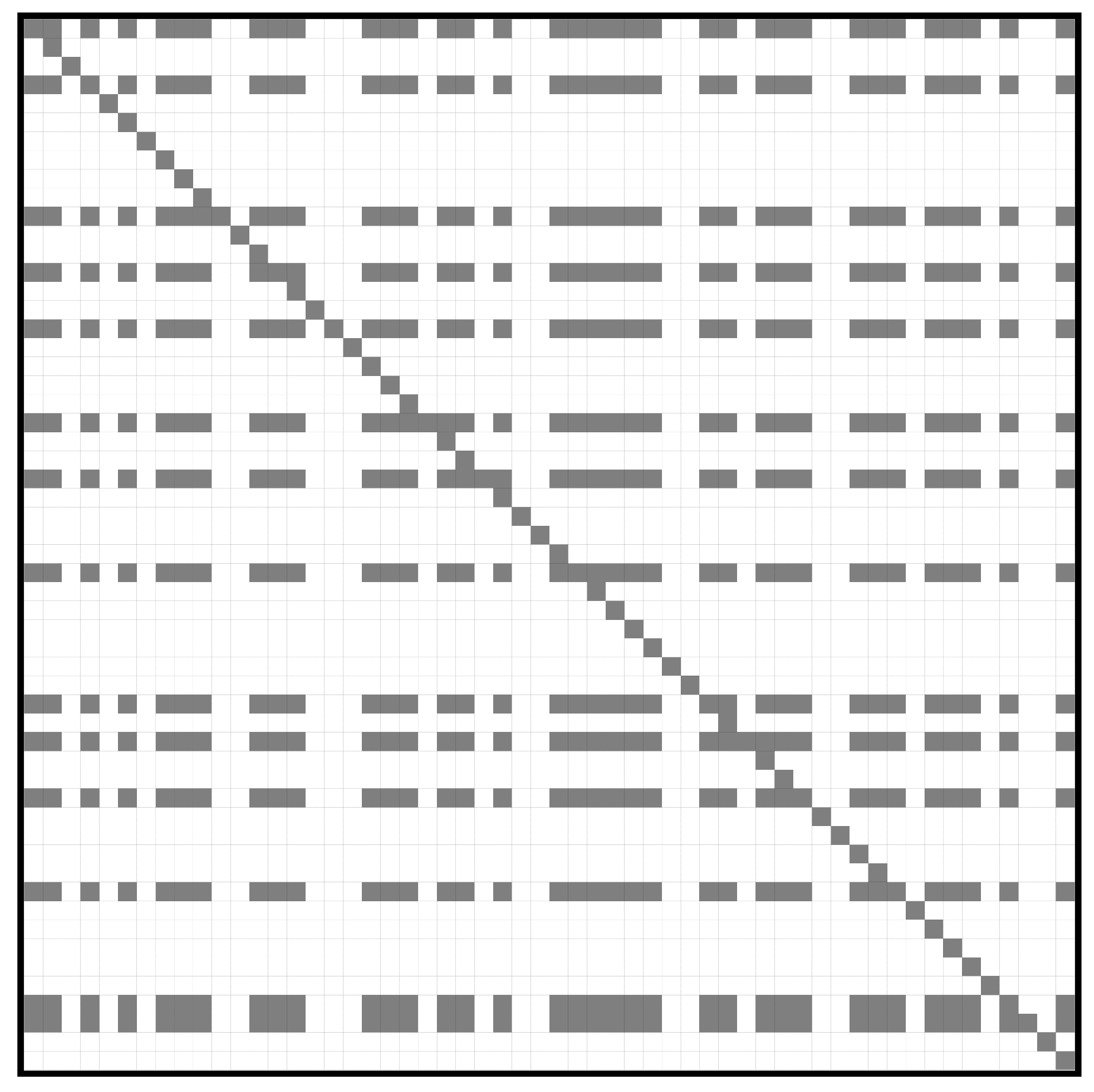
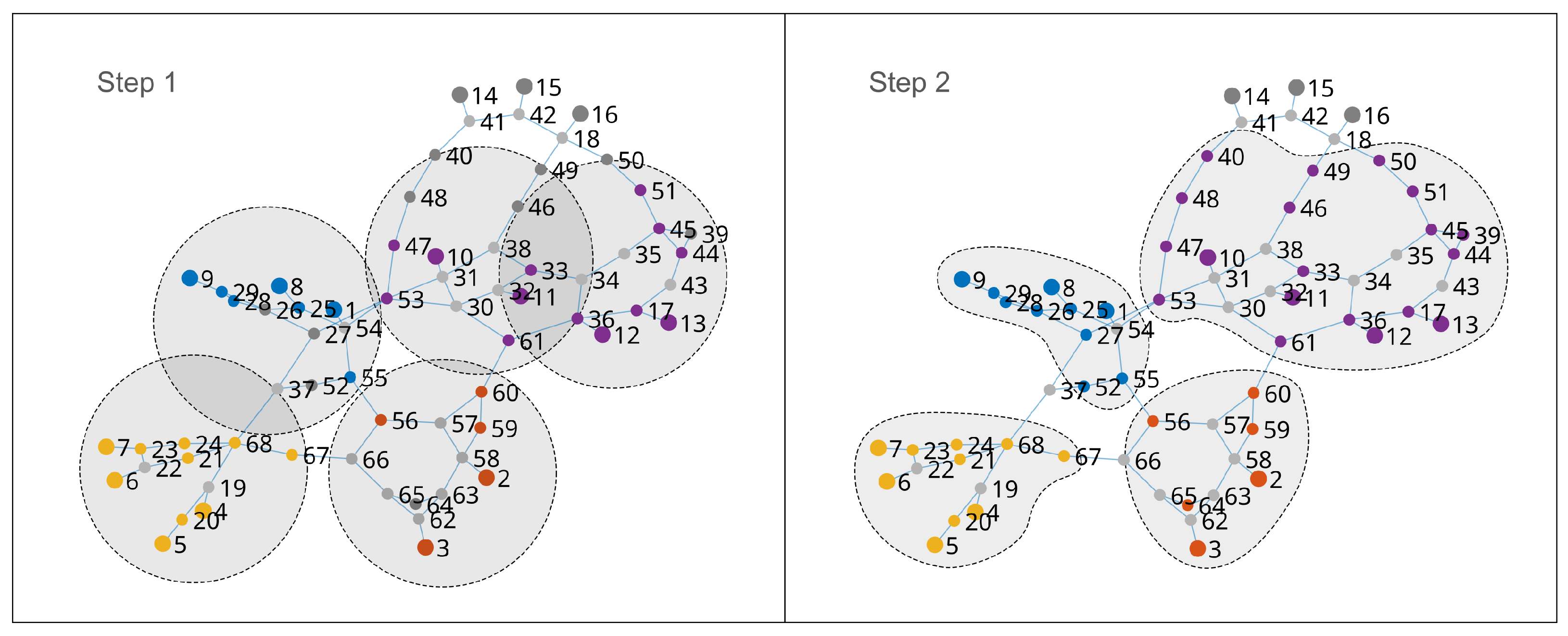
3.1. Cohesion: Microgrid Clustering
| Algorithm 1 Microgrid clustering for cohesion |
| Require: , weighted graph ▹ Representation of the system |
| Require: , set of nodes with generation |
| Require: , set of nodes with microgrids |
| Ensure: , dictionary of nodes to cluster |
|
3.2. Cooperation: Microgrid Collaboration
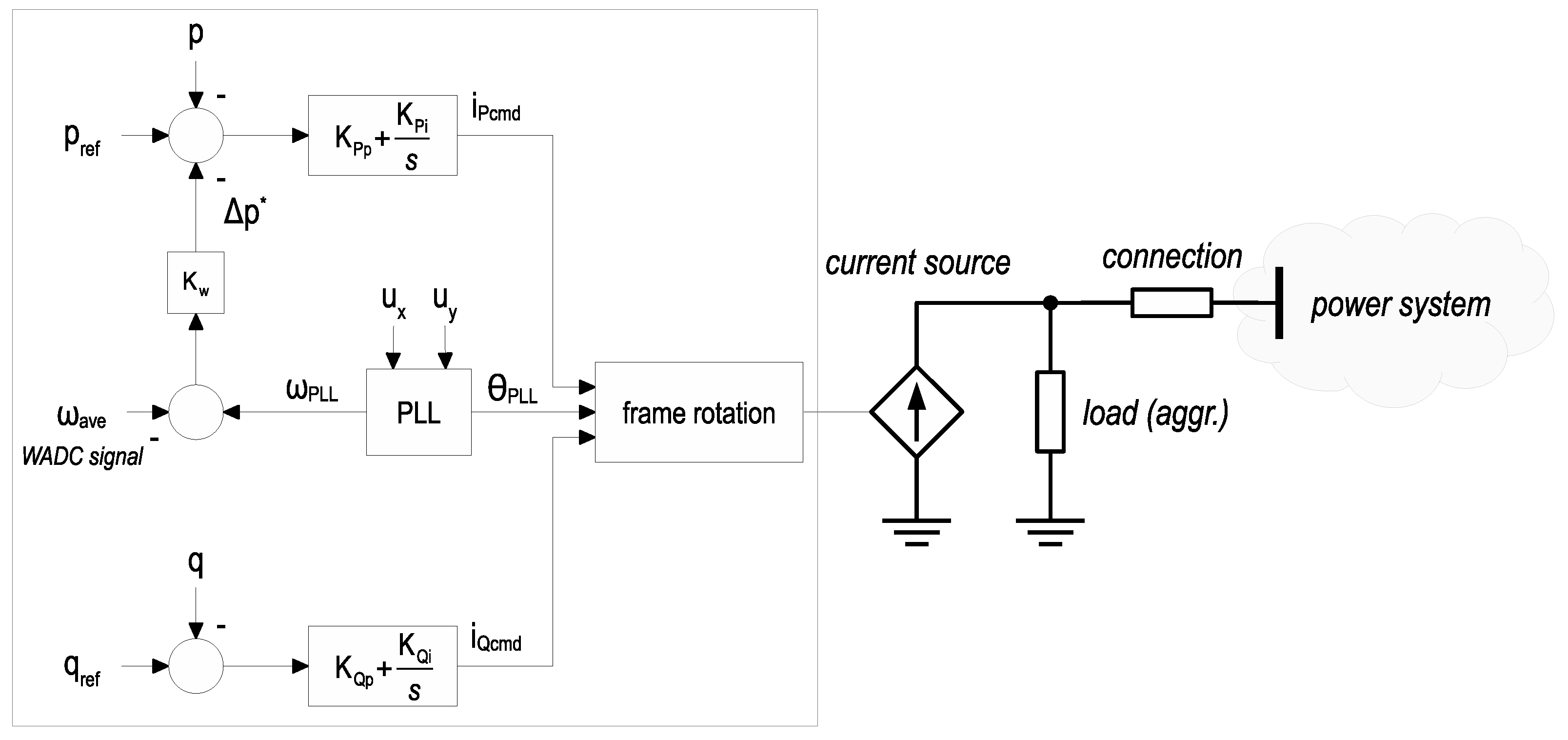
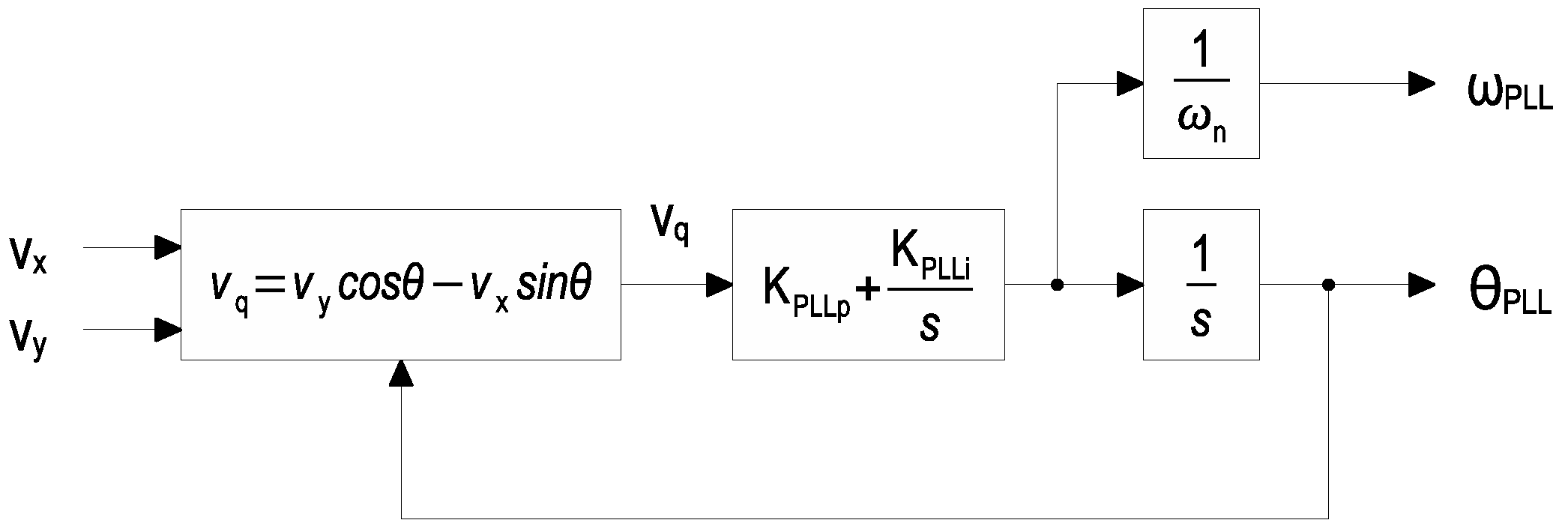
3.3. Alignment: Microgrids Control
4. Case Study: IEEE 68-Bus System
4.1. Model Description
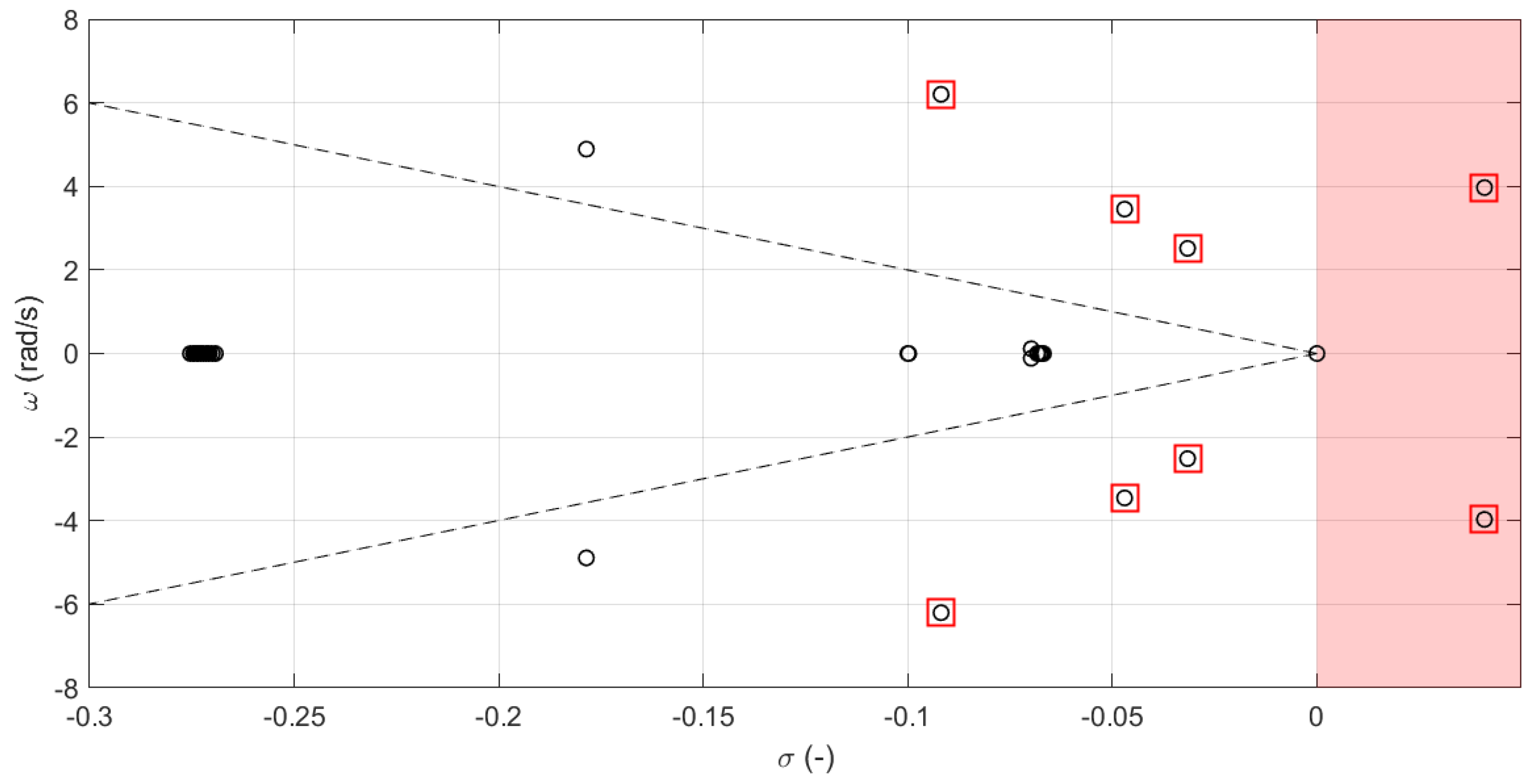
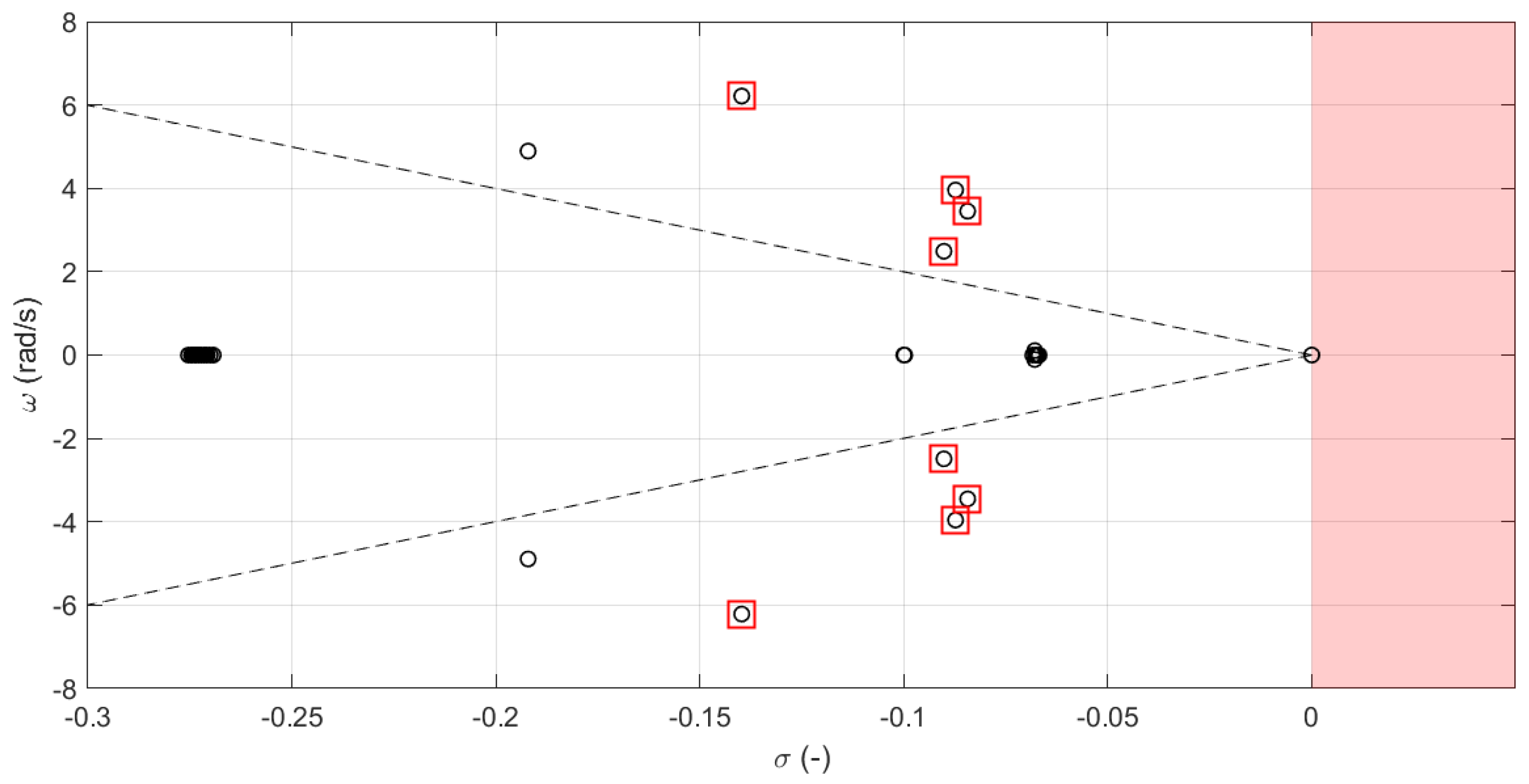
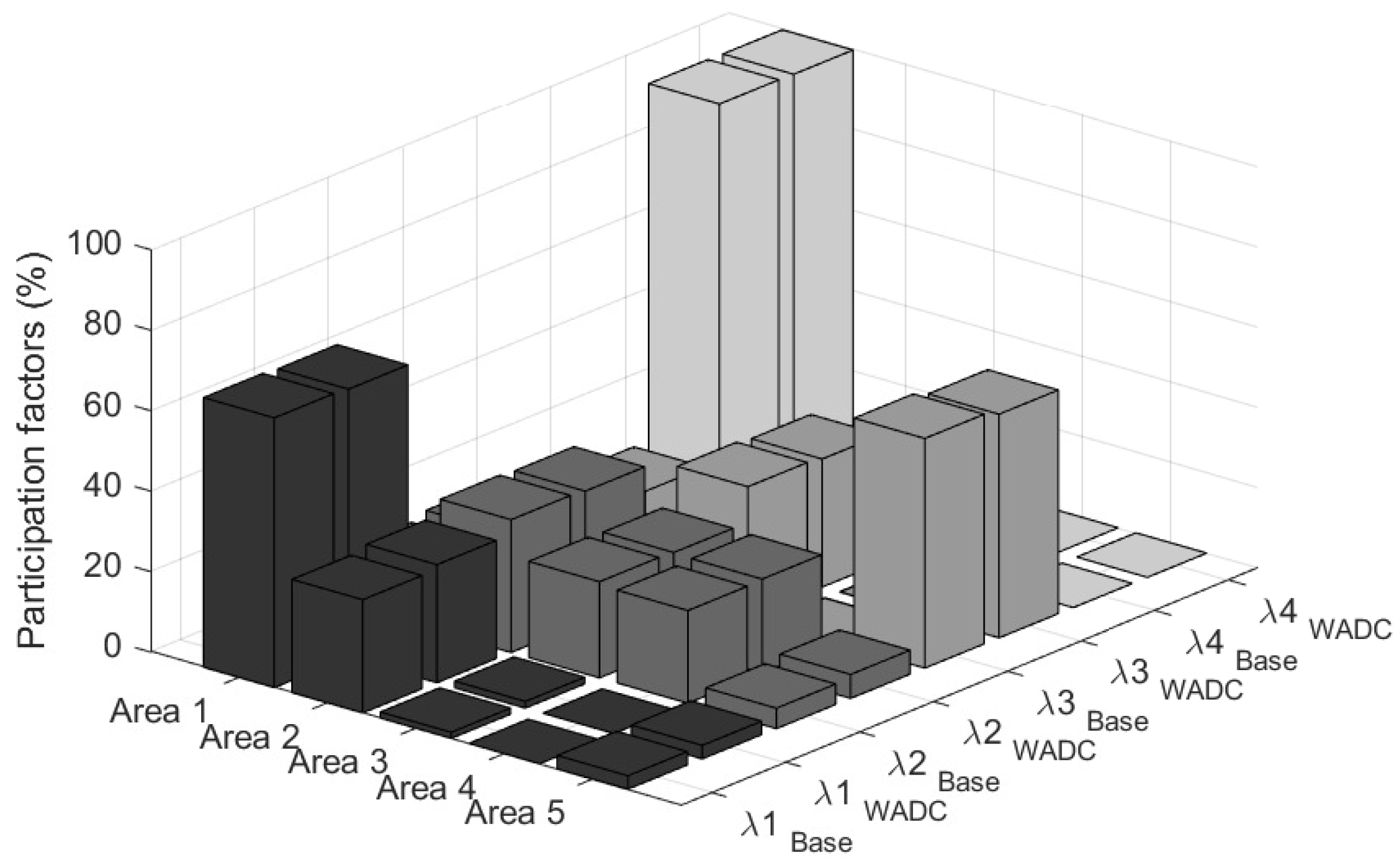
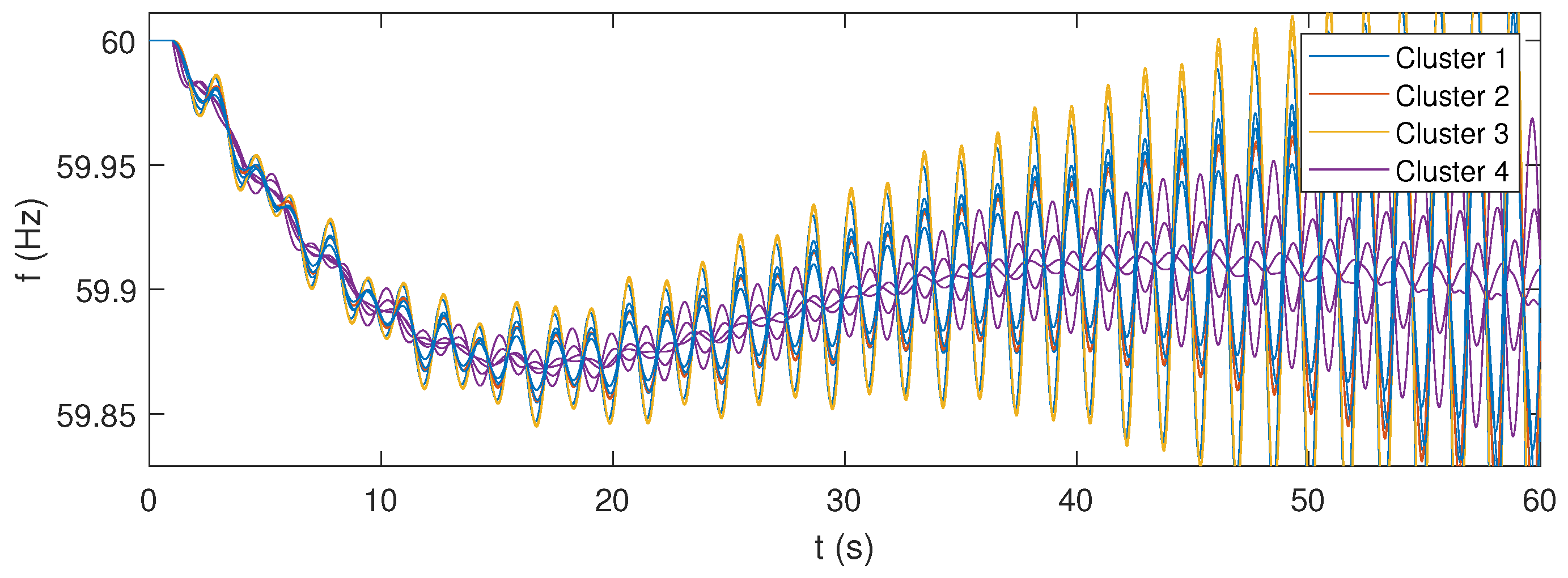
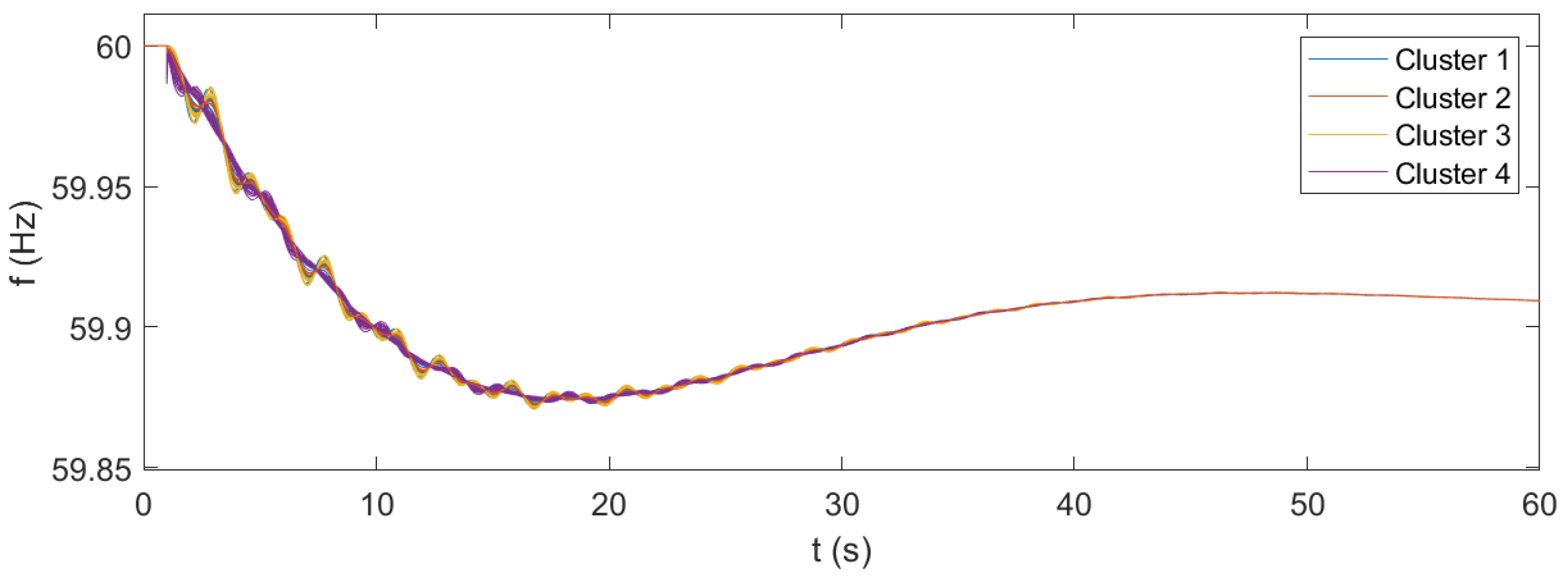
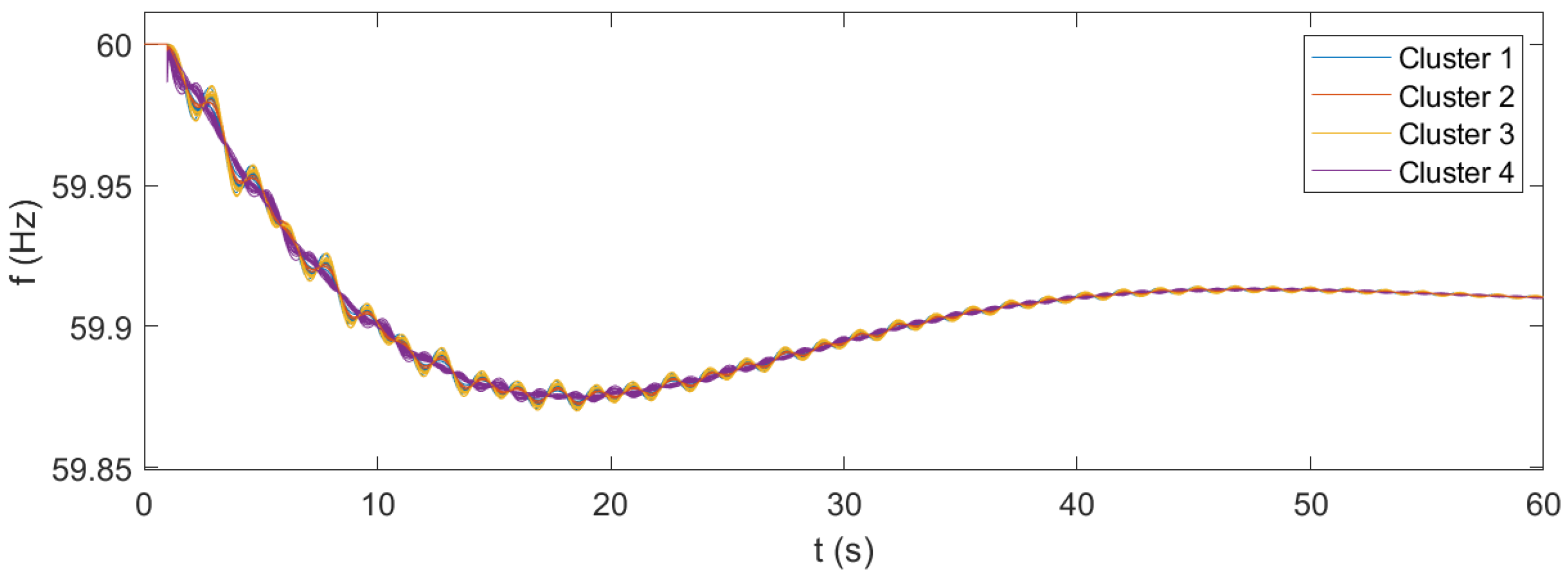
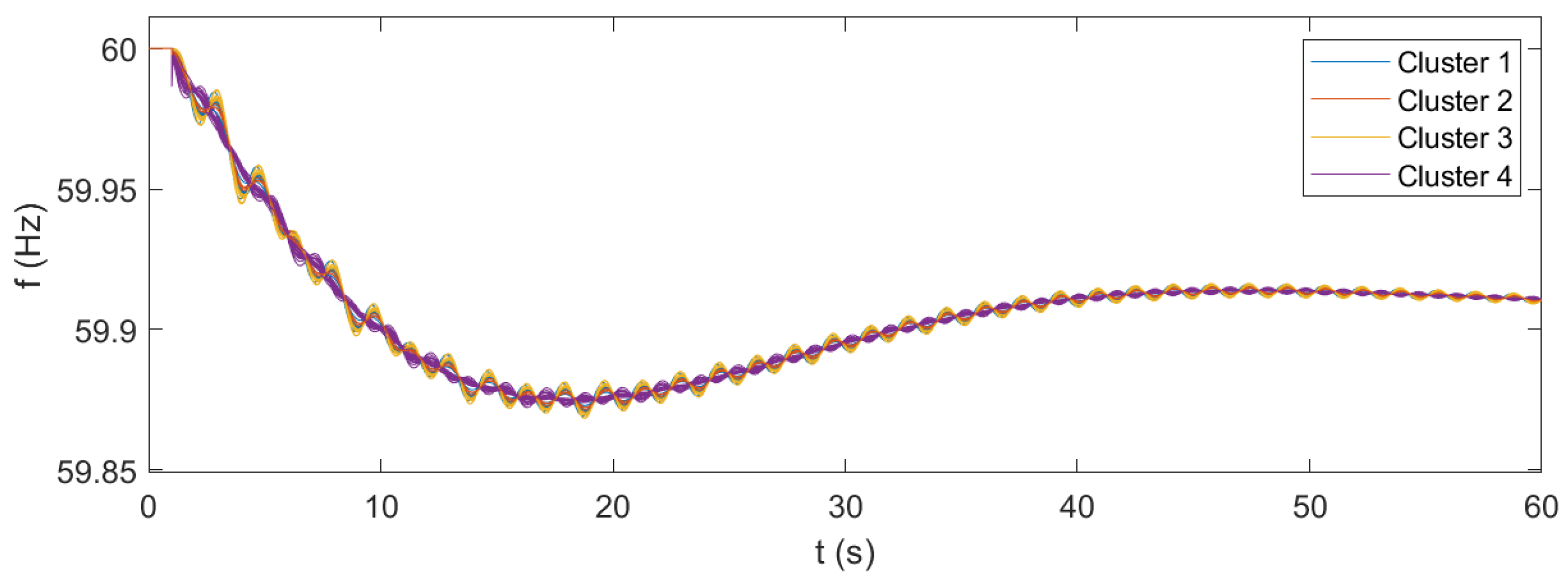
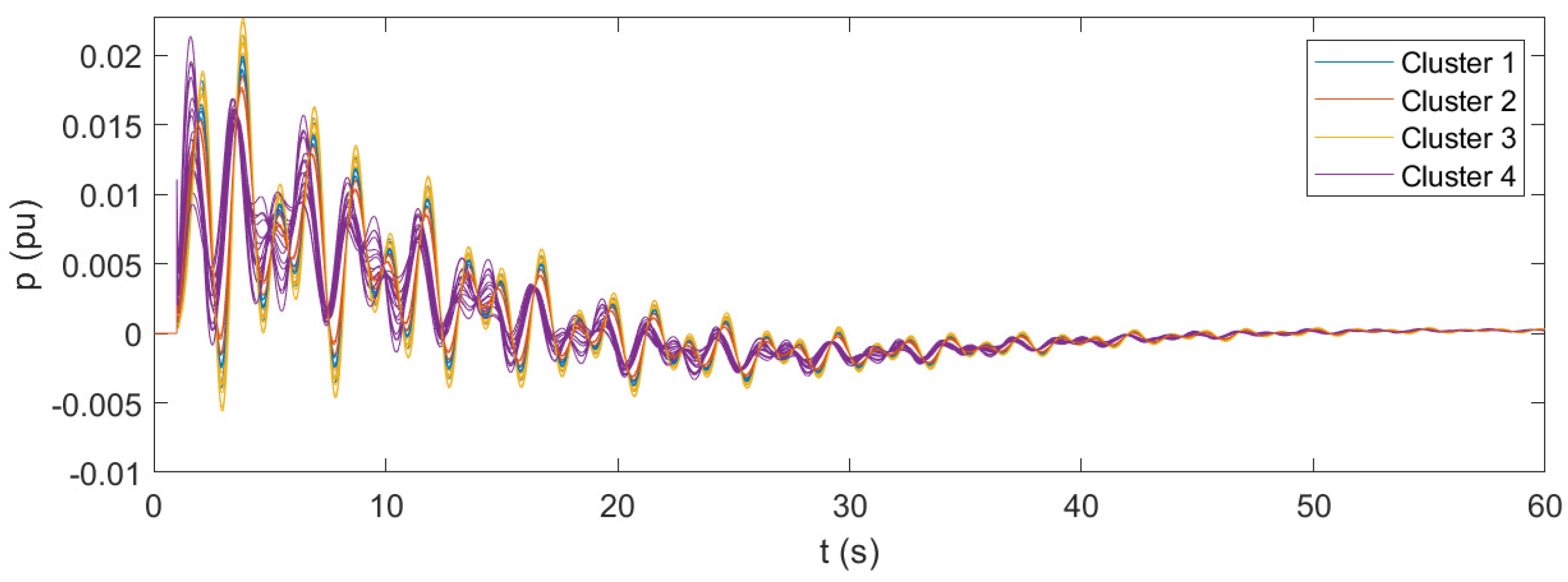
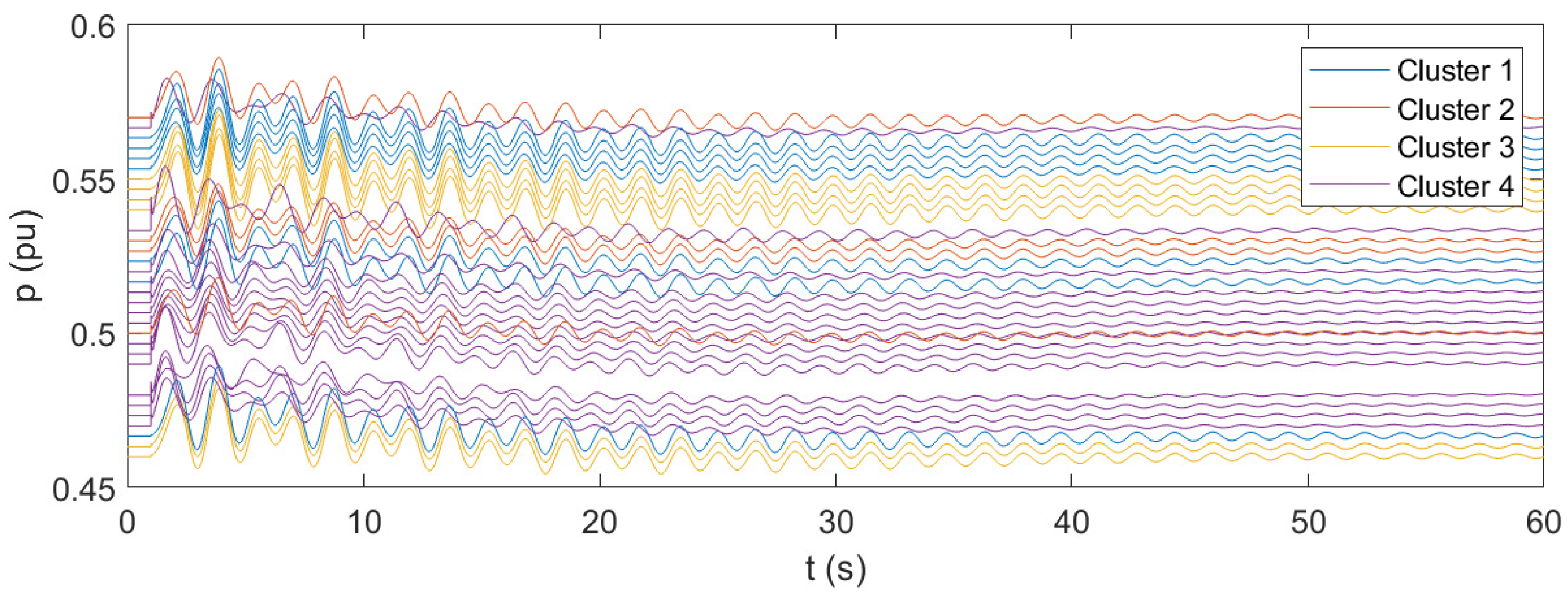
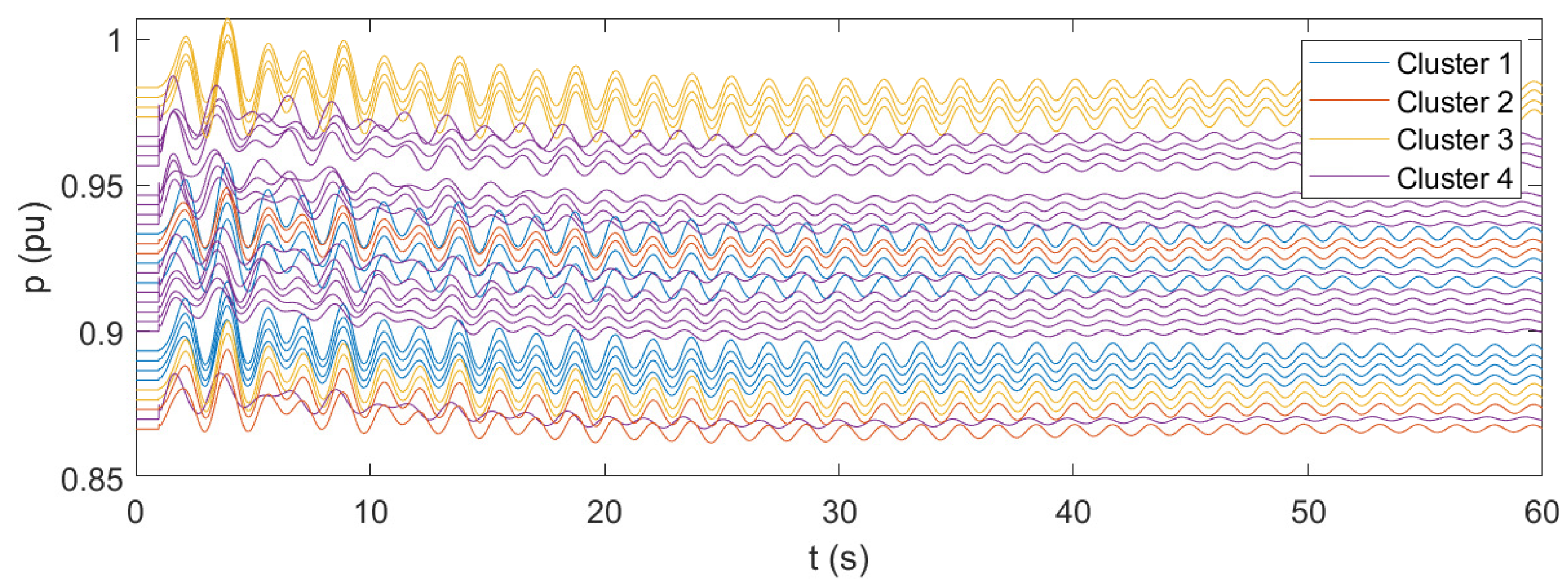
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Al-Greer, M.; Short, M. Strategies for Controlling Microgrid Networks with Energy Storage Systems: A Review. Energies 2021, 14, 7234. [Google Scholar] [CrossRef]
- Mannini, R.; Eynard, J.; Grieu, S. A Survey of Recent Advances in the Smart Management of Microgrids and Networked Microgrids. Energies 2022, 15, 7009. [Google Scholar] [CrossRef]
- Patsalides, M.; Papadimitriou, C.N.; Efthymiou, V.; Ciavarella, R.; Di Somma, M.; Wakszyńska, A.; Kosmecki, M.; Graditi, G.; Valenti, M. Frequency Stability Evaluation in Low Inertia Systems Utilizing Smart Hierarchical Controllers. Energies 2020, 13, 3506. [Google Scholar] [CrossRef]
- Zuhaib, M.; Rihan, M.; Gupta, S.; Sufyan, M.A.A. Identification and suppression of low-frequency oscillations using PMU measurements based power system model in smart grid. Sci. Rep. 2025, 15, 3822. [Google Scholar] [CrossRef]
- Sahoo, M.; Rai, S. A method for detection of Low Frequency Oscillatory modes in power system for wide area monitoring system. Comput. Electr. Eng. 2025, 123, 110172. [Google Scholar] [CrossRef]
- Jeyaraj, T.; Ponnusamy, A.; Selvaraj, D. Hybrid renewable energy systems stability analysis through future advancement technique: A review. Appl. Energy 2025, 383, 125355. [Google Scholar] [CrossRef]
- Abouzeid, S.I.; Chen, Y.; Zaery, M.; Abido, M.A.; Raza, A.; Abdelhameed, E.H. Load frequency control based on reinforcement learning for microgrids under false data attacks. Comput. Electr. Eng. 2025, 123, 110093. [Google Scholar] [CrossRef]
- Bento, M.E.C. Wide-Area Measurement-Based Two-Level Control Design to Tolerate Permanent Communication Failures. Energies 2023, 16, 5646. [Google Scholar] [CrossRef]
- Sun, M.; Guo, Y.; Song, S. The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals. Energies 2021, 14, 5892. [Google Scholar] [CrossRef]
- St. Leger, A.; Spruce, J.; Banwell, T.; Collins, M. Smart grid testbed for Wide-Area Monitoring and Control systems. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Dallas, TX, USA, 3–5 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Cai, G.; Yang, D.; Liu, C. Adaptive Wide-Area Damping Control Scheme for Smart Grids with Consideration of Signal Time Delay. Energies 2013, 6, 4841–4858. [Google Scholar] [CrossRef]
- Mohamed, A.; Ghareeb, A.; Youssef, T.; Mohammed, O.A. Wide area monitoring and control for voltage assessment in smart grids with distributed generation. In Proceedings of the 2013 IEEE PES Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 24–27 February 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Sufyan, M.A.A.; Zuhaib, M.; Anees, M.A.; Khair, A.; Rihan, M. Implementation of PMU-Based Distributed Wide Area Monitoring in Smart Grid. IEEE Access 2021, 9, 140768–140778. [Google Scholar] [CrossRef]
- Ippolito, M.G.; Musca, R. A novel wide-area control for general application to inverter-based resources in power systems. Int. J. Electr. Power Energy Syst. 2024, 160, 110086. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Musca, R.; Riva Sanseverino, E.; Zizzo, G.; Giannuzzi, G.; Pisani, C. Wide-Synchronization Control for Power Systems with Grid-Forming Converters. IEEE Trans. Power Syst. 2024, 39, 4998–5007. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 27–31 July 1987; pp. 25–34. [Google Scholar] [CrossRef]
- Luo, X.; Li, S.; Guan, X. Flocking algorithm with multi-target tracking for multi-agent systems. Pattern Recognit. Lett. 2010, 31, 800–805. [Google Scholar] [CrossRef]
- Housheng Su, X.W.; Chen, G. A connectivity-preserving flocking algorithm for multi-agent systems based only on position measurements. Int. J. Control. 2009, 82, 1334–1343. [Google Scholar] [CrossRef]
- Benchmark Systems for Small-Signal Stability Analysis and Control; Technical Report, IEEE Power and Energy Society; IEEE Power System Dynamic Performance Committee: Piscataway, NJ, USA, 2015.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cluster | Nodes (Generation) | Nodes (Microgrids) |
|---|---|---|
| # 1 | 1, 8, 9 | 25, 26, 27, 28, 29, 52, 55 |
| # 2 | 2, 3 | 56, 59, 60, 64 |
| # 3 | 4, 5, 6, 7 | 20, 21, 23, 24, 67, 68 |
| # 4 | 10, 11, 12, 13 | 17, 33, 36, 39, 40, 44, 45, 46, 47, 48, 49, 50, 51, 53, 61 |
| Base case | |||
| ID | Eigenvalue | Damping ratio (%) | Natural frequency (Hz) |
| 0.63 | |||
| 1.26 | 0.40 | ||
| 1.36 | 0.55 | ||
| 1.48 | 0.99 | ||
| WADC conventional | |||
| ID | Eigenvalue | Damping ratio (%) | Natural frequency (Hz) |
| 0.73 | 0.63 | ||
| 2.18 | 0.39 | ||
| 1.79 | 0.55 | ||
| 2.00 | 0.99 | ||
| WADC microgrids | |||
| ID | Eigenvalue | Damping ratio (%) | Natural frequency (Hz) |
| 2.21 | 0.63 | ||
| 3.62 | 0.39 | ||
| 2.44 | 0.55 | ||
| 2.25 | 0.99 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Musca, R.; Riva Sanseverino, E.; Guerrero, J.M.; Vasquez, J.C. Wide-Area Damping Control for Clustered Microgrids. Energies 2025, 18, 1632. https://doi.org/10.3390/en18071632
Musca R, Riva Sanseverino E, Guerrero JM, Vasquez JC. Wide-Area Damping Control for Clustered Microgrids. Energies. 2025; 18(7):1632. https://doi.org/10.3390/en18071632
Chicago/Turabian StyleMusca, Rossano, Eleonora Riva Sanseverino, Josep M. Guerrero, and Juan C. Vasquez. 2025. "Wide-Area Damping Control for Clustered Microgrids" Energies 18, no. 7: 1632. https://doi.org/10.3390/en18071632
APA StyleMusca, R., Riva Sanseverino, E., Guerrero, J. M., & Vasquez, J. C. (2025). Wide-Area Damping Control for Clustered Microgrids. Energies, 18(7), 1632. https://doi.org/10.3390/en18071632