1. Introduction
The global community is facing considerable challenges due to the increasing growth in energy consumption and the need to reduce carbon emissions. In order to achieve sustainability, electric power systems must adapt to new technologies and evolving patterns of energy consumption. While the widespread adoption of solar panels over the past decade has led to substantial advancements, their integration into the electricity grid poses significant challenges, both technological and economic. Ensuring system stability, maintaining a balance between production and consumption, and managing decentralized generation require particular attention [
1,
2].
In this context, uninterruptible power supplies, especially hybrid solutions integrating solar panels, play a key role. These systems not only provide a continuous power supply but also offer the possibility to optimize energy management. With energy management, hybrid UPS systems can be operated more economically by allowing the electricity generated by the solar panels to be consumed locally instead of being fed into the grid. This provides a significant advantage, especially in changing market conditions.
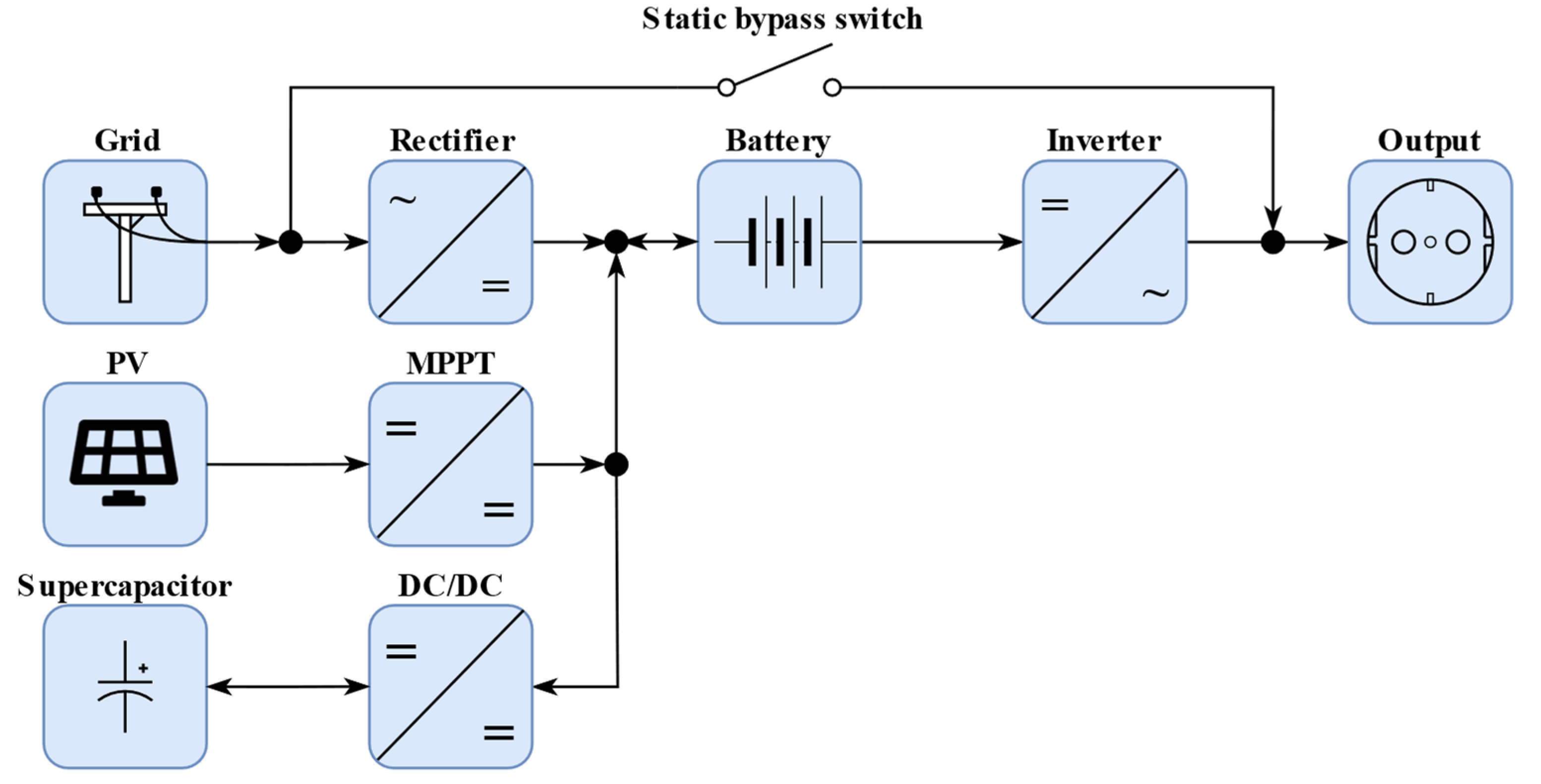
With the increasing prevalence of renewable energy sources, there has been a growing focus on decentralized energy supply systems, such as microgrids and nanogrids, which seek to optimize local energy utilization and enhance independence from the grid. Hybrid UPS systems and microgrid or nanogrid systems exhibit numerous similarities; however, for smaller systems, hybrid UPS systems are often the preferred option due to their cost-effectiveness and ease of control, attributable to their more straightforward design. Microgrid and nanogrid systems offer greater flexibility and more complex control options but come at a higher investment cost due to advanced control and integration of multiple power sources. Hybrid UPS systems are ideal where meeting local power demand, ensuring continuous power supply, and simple implementation are key considerations, especially for smaller-scale systems. These systems are more efficient when the aim is to use the energy generated by the solar panels locally, while providing cost-effectiveness and easy controllability. Generally, the architecture of a hybrid UPS system includes solar panels, battery storage, and an inverter system. Solar panels are used to convert sunlight into electricity that may be directly utilized for feeding the connected loads or stored in batteries for later use [
3]. Optionally, the system can also include supercapacitors and fuel cells.
Figure 1 shows an example of an intelligent hybrid UPS system [
4,
5].
In hybrid UPS systems, centralized leader–follower control strategies are essential to manage distributed energy resources and ensure stable operation. This control architecture includes a leader unit that oversees the operation of multiple follower units and coordinates their actions to maintain voltage levels, efficiently share power, and respond to changes in load demand. Yang et al. say that for centralized DC microgrid systems, leader–follower control can be implemented, where the leader controls voltage and the followers control current [
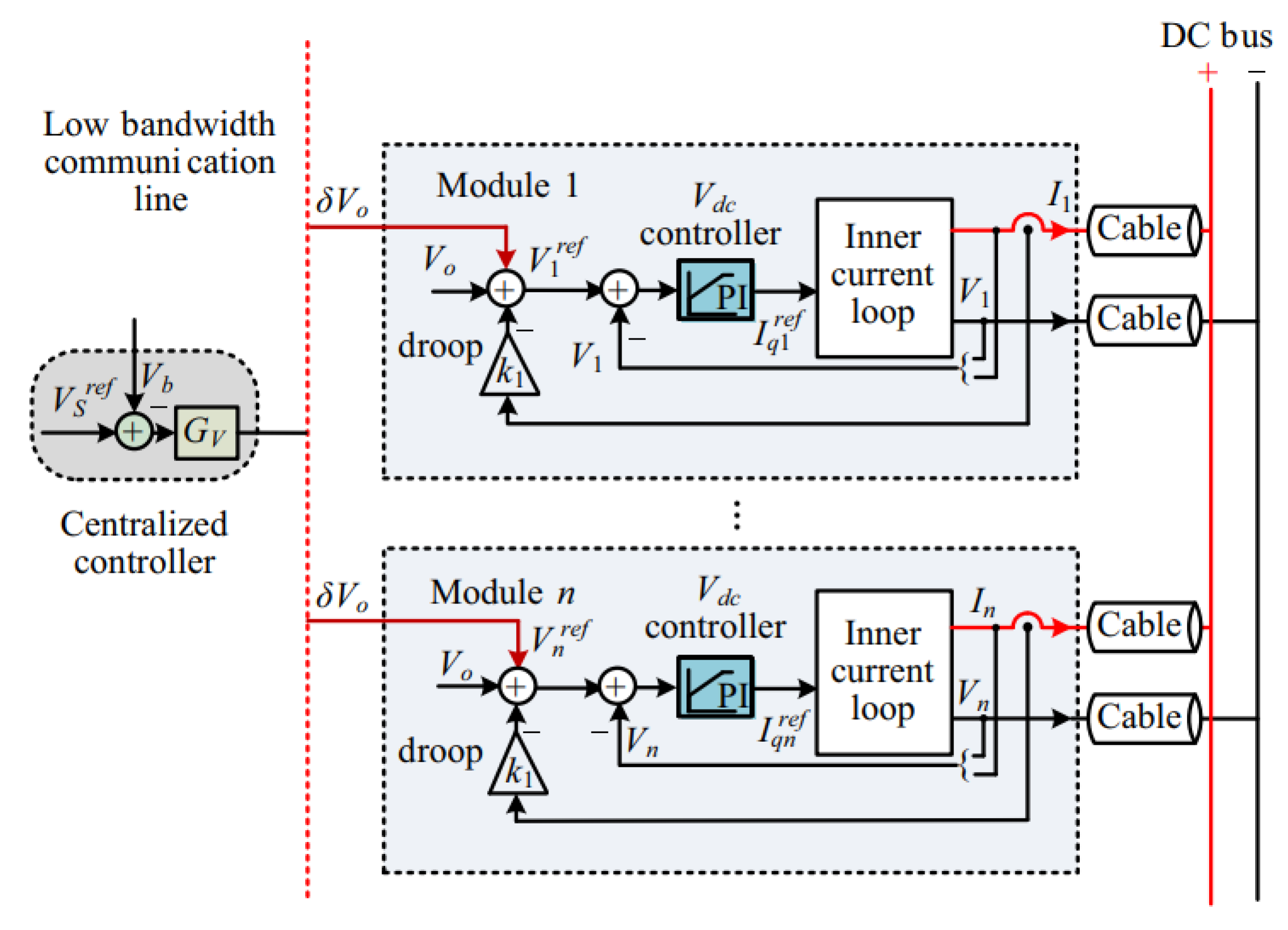
6]. Gao et al. also argue, symbolized in
Figure 2, for a centralized leader–follower control strategy [
7]. The figure shows that the control unit generates a voltage error signal from the voltage base signal and the feedback signal and sends it to the various modules, electronic converters, on the communication line. Each module has a droop controller, a voltage PI controller, and an internal control circuit. The output of each electronic converter is connected in parallel to the common DC circuit.
There are currently several scientific problems with hybrid UPS, microgrid, and nanogrid systems. One of the biggest problems is the primary and secondary control of parallel connected generators (e.g., grid, solar, battery) when they supply different proportions of consumers. The control is performed by a droop controller which, in addition to load sharing, also tries to stabilize the voltage. Traditional droop control methods can lead to issues such as voltage deviations and poor load sharing when the sources have different characteristics or when there are variations in line impedances [
8,
9,
10]. Variability in renewable generation can lead to rapid fluctuations in power output, which traditional droop control methods may struggle to accommodate. This variability can result in significant voltage deviations and challenges in maintaining system stability [
8,
11]. In addition to these technical challenges, the communication requirements of hybrid UPS systems can also pose problems. While droop control is advantageous due to its decentralized nature, the lack of communication can lead to difficulties in achieving coordinated control among multiple sources [
12]. Furthermore, the design of droop control parameters is crucial for ensuring optimal performance in hybrid UPS systems. The selection of appropriate droop coefficients is essential for achieving accurate power sharing and voltage control, according to Bunker et al. [
13].
Artificial neural networks have emerged as a promising alternative to traditional PID controllers in managing power sharing within hybrid UPS systems. This assertion is supported by various studies that highlight the advantages of ANN-based control strategies, particularly in terms of adaptability, efficiency, and performance under varying operational conditions. One of the primary advantages of ANN controllers is their ability to learn and adapt in real time, which is crucial for hybrid UPS systems that often face dynamic load conditions. For instance, Alatshan et al. emphasize that ANN controllers can learn from historical data and make informed decisions without requiring a precise mathematical model of the system, thus providing a fast dynamic response [
14]. This capability allows ANNs to effectively manage the complexities associated with power sharing in hybrid systems, particularly when compared to the static nature of PID controllers, which rely on fixed parameters that may not adequately respond to changing conditions [
15]. Moreover, the robustness of ANN controllers in handling nonlinear and time-varying systems is well documented. Amer et al. note that ANNs can model nonlinear, multiple-input multiple-output (MIMO) systems, making them particularly suitable for the intricate dynamics of hybrid UPS systems [
16]. This adaptability is further enhanced by the ability of ANNs to optimize control strategies in real time, as demonstrated in various applications ranging from microgrid energy management to voltage stability improvement in power systems [
17]. In contrast, PID controllers often struggle with nonlinearity and require extensive tuning to achieve optimal performance, which can be time-consuming and inefficient [
18]. Yang et al. highlight that ANN-based controllers significantly enhance the performance of electrified pressure-swing distillation by dynamically adapting to process variations and nonlinear system behaviors. Unlike traditional control methods, ANN controllers can learn complex relationships within the system, enabling precise composition control and reducing energy consumption. This adaptability improves robustness against disturbances and ensures a more stable and efficient separation process [
19].
Battery selection also plays a significant role in the operating environment of UPS systems. For example, in data centers and hospitals, where reliability is paramount, factors such as temperature stability, cycle life, and maintenance requirements should be considered when selecting battery technology, according to Ciancetta et al. [
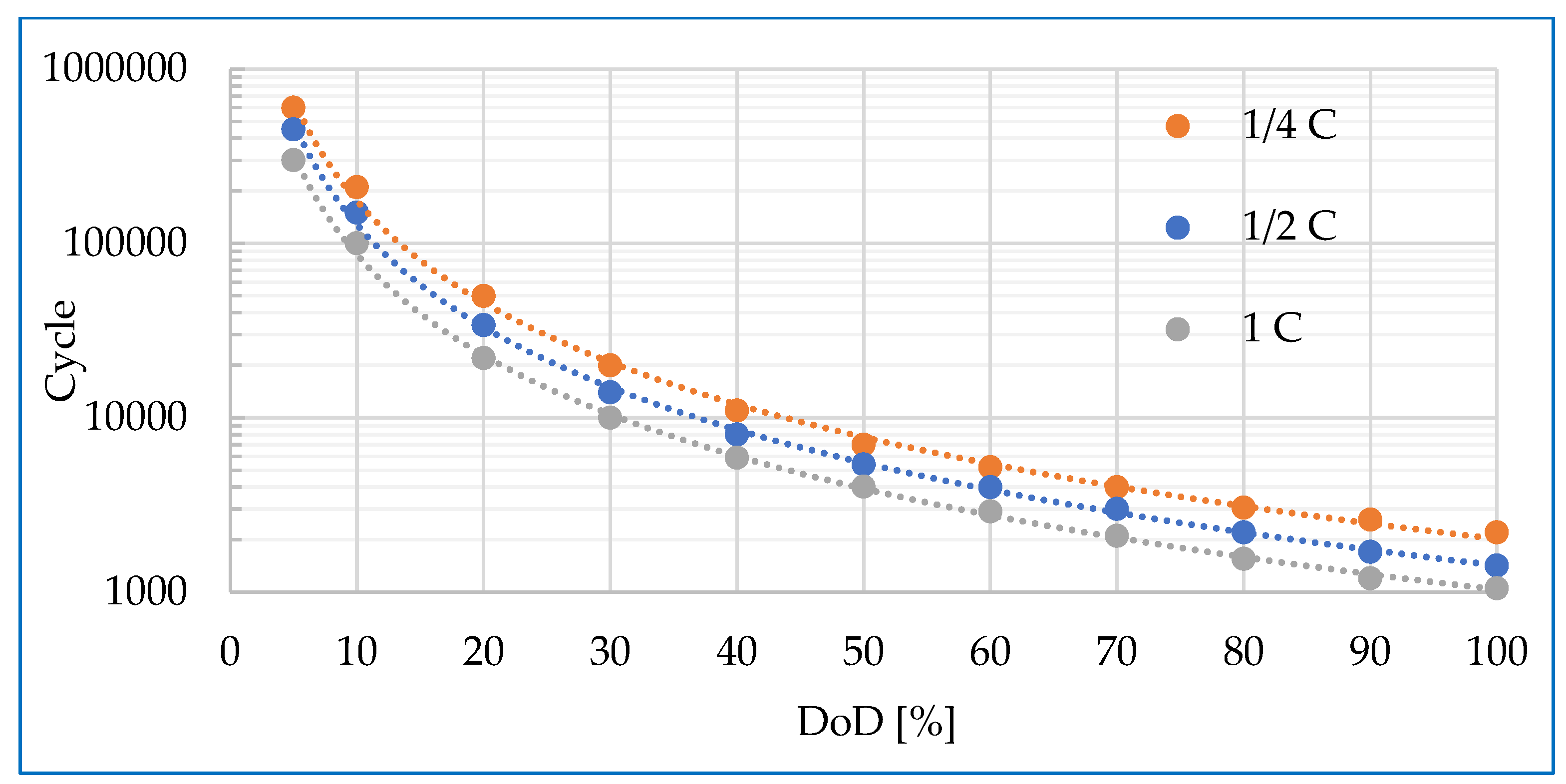
20]. In these critical applications, the use of lithium-ion batteries may be justified despite their higher cost due to their improved performance and lower overall cost in the long term. Understanding the factors that affect battery performance, such as the depth of discharge (DoD), load current, and degradation mechanisms, is essential to optimize battery life and efficiency. The results of several studies shed light on the complex dynamics of the Li-ion battery life cycle, focusing on the interaction between DoD, load current, and degradation processes. The lifetime of Li-ion batteries is significantly affected by the depth of discharge. DoD is the percentage of the battery’s capacity relative to its total capacity. Research shows that deeper discharges generally lead to increased degradation rates as they can cause structural changes in the battery’s electrodes and electrolyte system. For example, deep discharges can lead to the formation of solid electrolyte interphase layers that consume active lithium and contribute to a decrease in capacity over time, according to several research groups [
21,
22,
23].
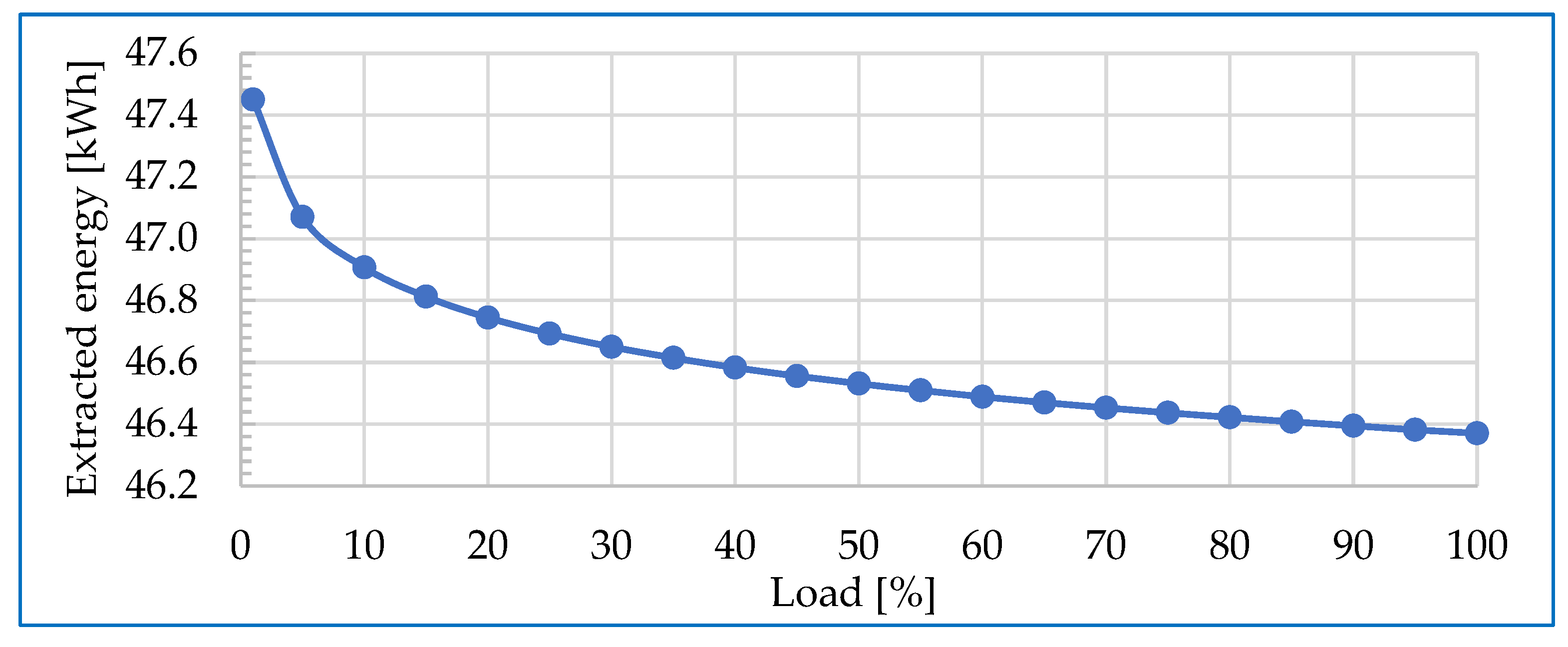
In addition, studies have shown that operating at high DoD can increase internal resistance and reduce overall battery cycle time [
21,
22,
24]. Increased internal resistance causes greater internal heating and reduces the amount of energy that can be extracted, but also accelerates chemical reactions [
25,
26]. In contrast, lower load currents tend to increase battery life by minimizing thermal stress and allowing more efficient lithium-ion intercalation and deintercalation processes, according to several research groups [
27,
28,
29]. This underlines the importance of optimizing DoD and load current to increase the operational efficiency and lifetime of Li-ion batteries, as these affect degradation mechanisms.
Another major challenge for hybrid UPS systems is the control of multiple power sources by an EMS. The use of energy management in hybrid UPS systems is key to increasing system efficiency and economy. Energy management algorithms allow the system to draw energy from the batteries and the grid in optimal proportions, considering the current production of solar panels, grid energy prices, and changing consumption patterns. These algorithms not only improve the stability and reliability of the system but also result in significant cost savings over long-term operation. Dynamic energy management allows the system to adapt to changing loads and energy sources in real time, while minimizing the cost of energy use. This is particularly important in changing market conditions, where grid energy prices often fluctuate, and solar power generation is also dependent on weather conditions. Long et al. highlight that the integration of different power sources requires sophisticated control systems to manage the fluctuations in power output effectively [
30]. Moreover, the management of energy flow within hybrid systems is often hindered by the bidirectional nature of energy transfer. As noted by Zhang et al., the increasing penetration of renewable resources introduces challenges related to randomness in power generation and the need for effective demand response mechanisms [
31]. This bidirectionality necessitates advanced EMS capable of real-time monitoring and control to optimize energy distribution and minimize losses [
32]. Another significant issue is the optimization of energy management strategies to minimize operational costs while maximizing efficiency.
The economic model for hybrid UPS systems is fundamentally based on the optimization of energy sources and storage solutions. The study by Saidi et al. claims that integrating PV systems with battery storage can significantly reduce energy costs by leveraging renewable energy during peak generation periods while utilizing stored energy during high-demand periods [
33]. The Levelized Cost of Energy (LCOE) is a critical metric in EMSs, particularly regarding the economic viability of various energy generation technologies [
34]. LCOE represents the per-unit cost (typically in terms of currency per kilowatt-hour) of building and operating a power plant over an assumed financial life and duty cycle. This metric is essential for comparing the cost-effectiveness of different energy sources, including renewables like solar and wind. The integration of LCOE into EMSs allows for a more informed decision-making process regarding energy investments and operational strategies.
It is necessary to be prepared for the possibility that some utilities in the EU will switch from 15 min settlement to minute or even more dynamic billing systems in the future, which will create additional opportunities to optimize energy use. In this case, the ability to consume simultaneously from the grid and from batteries, with the optimal ratio being determined in real time based on an economic model, will become increasingly important. This not only helps to reduce costs, but also increases the flexibility of the system.
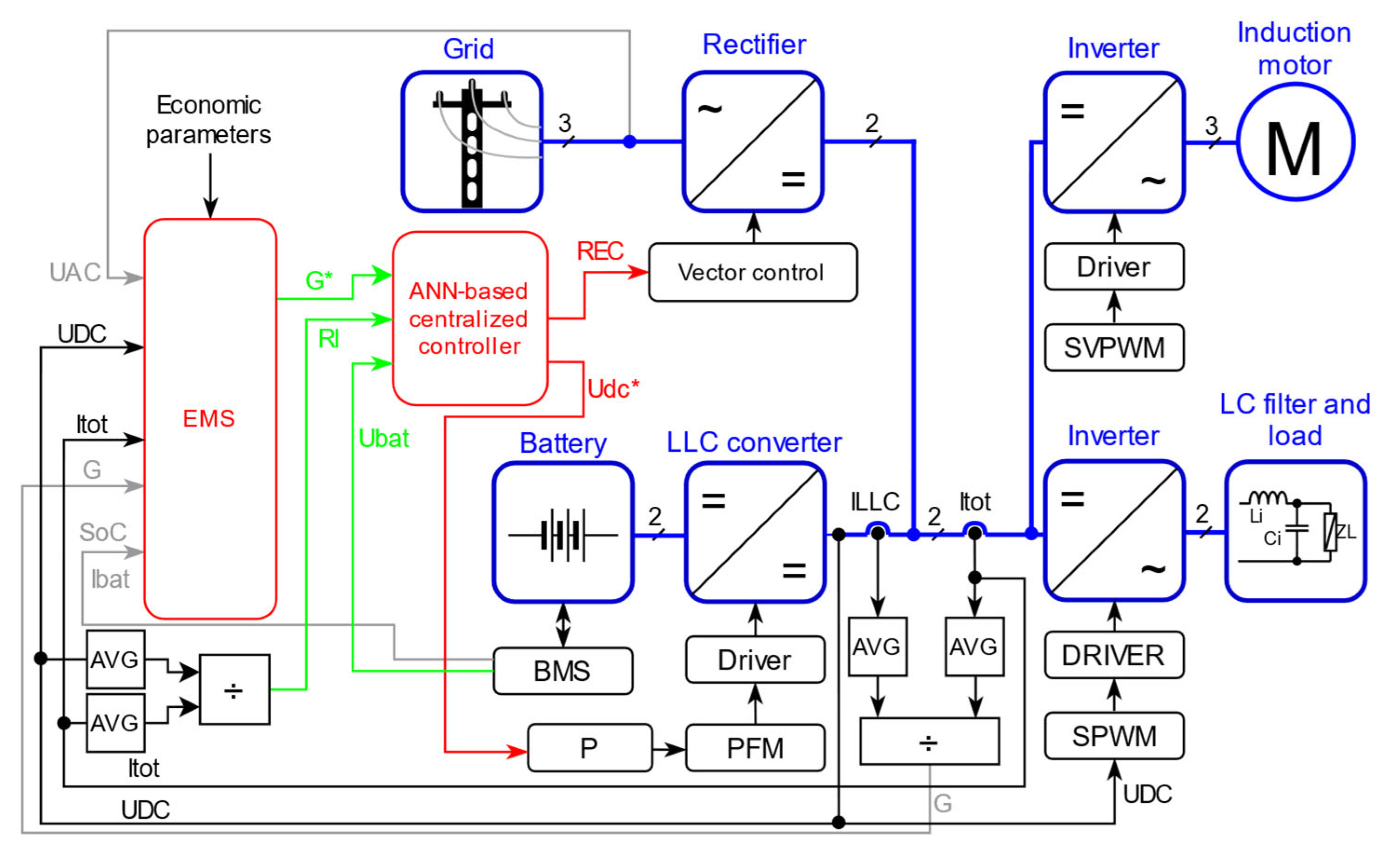
This study proposes an optimized real-time energy management and control strategy for PV-integrated hybrid UPS systems. The EMS determines the optimal power-sharing ratio between battery storage and the grid, considering real-time economic parameters, load demand, and the SoC of the battery. The ANN-based centralized control system ensures the LLC converter and rectifier accurately execute these setpoints, maintaining system stability and efficiency.
Additionally, a dynamic power management scheme is introduced, designed for bypass-free, solar online hybrid UPS systems. This system enhances flexibility by allowing real-time adjustments based on electricity tariffs, renewable generation, and load variations. It ensures a continuous and cost-effective power supply even during grid outages, addressing the limitations of existing EMSs, which often rely on slow and coarse control. By integrating ANN-based control with dynamic power management, this approach enables a more responsive and efficient operation, reducing costs and improving sustainability. Future developments in electricity pricing, such as shorter billing intervals, further emphasize the necessity of advanced energy management strategies.
The remainder of this paper is structured as follows.
Section 2 describes the materials and methods, including the ANN-based centralized control strategy, real-time energy management, optimization methodology, and validation methods.
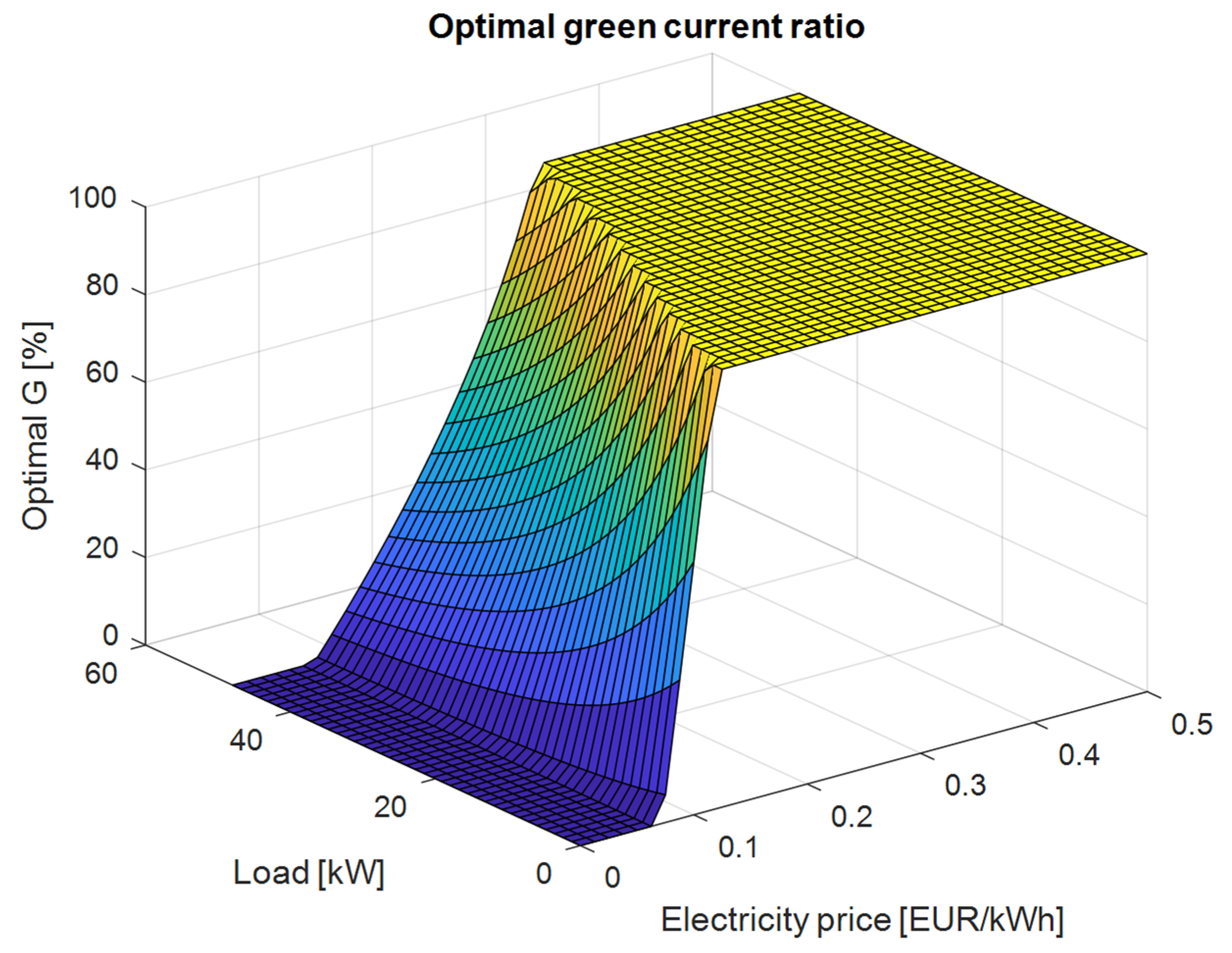
Section 3 presents the results, including simulations of the ANN-based controller, analysis of optimized energy management, and validation of the identification algorithm. It is also shown that the green current ratio (power sharing) should be controlled in real time.
Section 4 concludes the paper, summarizing the key findings and outlining potential future research directions.
4. Discussion and Conclusions
Overall, the simulation results confirm that the intelligence of the neural network can effectively implement dynamic power sharing in the hybrid solar UPS system. At the same time, it ensures a constant voltage in the DC bus, enabling uninterrupted operation of the consumers regardless of changes in input parameters. The neural network functions reliably even with unknown input values, further validating the correctness of the training method and the identifier’s operation. The centralized control topology implemented with the neural network enables robust regulation among distributed power sources, eliminating the need for complex tuning procedures during system deployment. The identification process runs automatically, leaving the engineer responsible only for training the neural network based on the available data.
It is crucial to tune the local P controller of the LLC converter before running the identification algorithm so that, at 100% green energy ratio, it can stably supply the consumers under varying input conditions, such as different battery voltage levels and load magnitudes. Once identification begins, further tuning of the controller is not possible. The nominal power of the LLC converter must be designed to ensure that, even at 100% green energy ratio, it can supply the total power demand of the consumers connected to the DC bus.
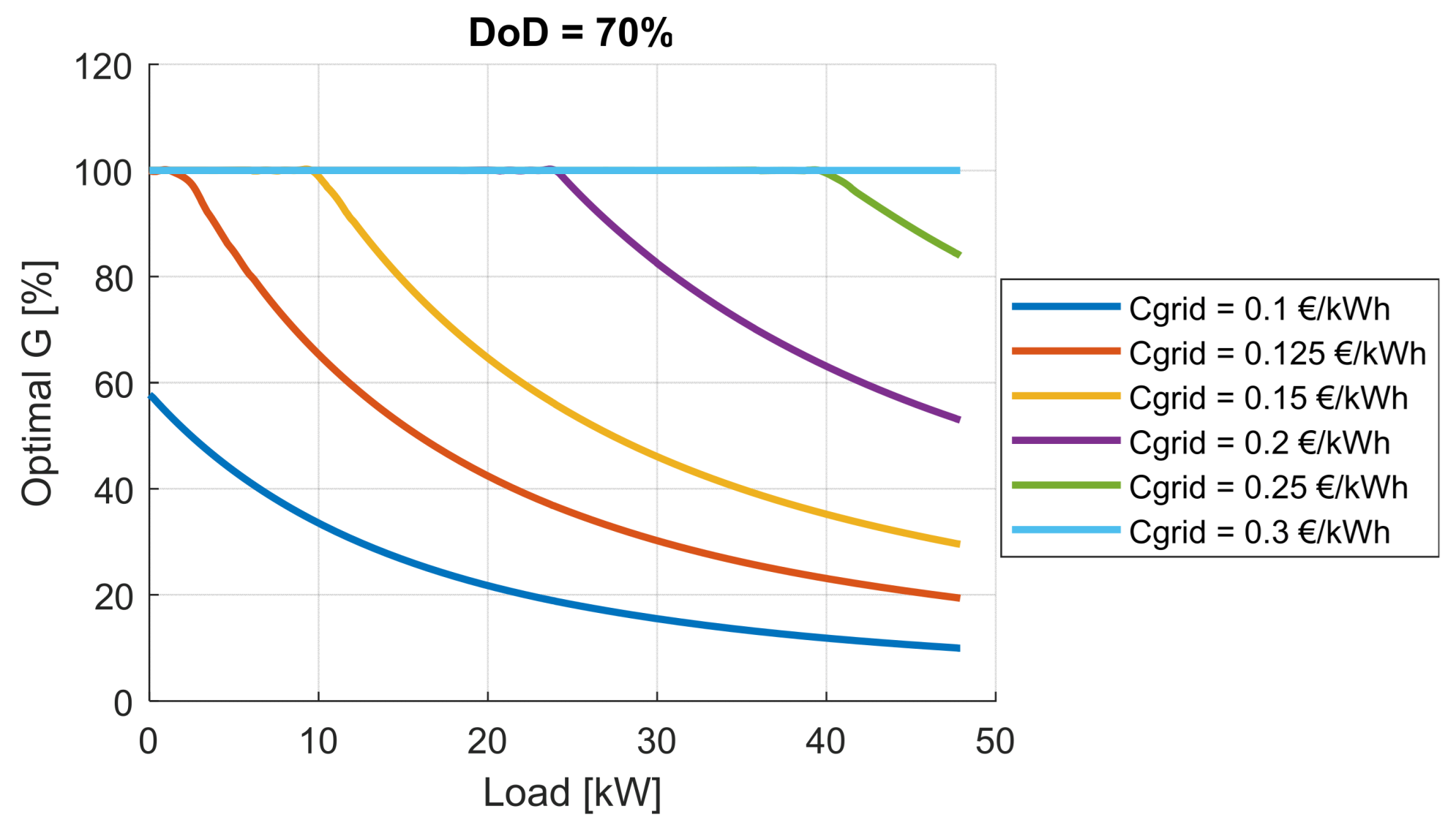
Regulating the green energy ratio at low loads presents a challenge. For this reason, both identification and neural network training were conducted up to a 1 kΩ load. The accuracy of current sensors and measurement noise are particularly critical factors, as the signal-to-noise ratio (SNR) deteriorates at low currents, potentially leading to instability in the control algorithm. Additionally, from an economic perspective, operating both converters simultaneously at low loads is not beneficial, as demonstrated in the next chapter. The system examined in the simulations includes a small squirrel-cage induction motor and a low-power single-phase load. In practical applications, control is typically required for consumers with significantly higher power ratings.
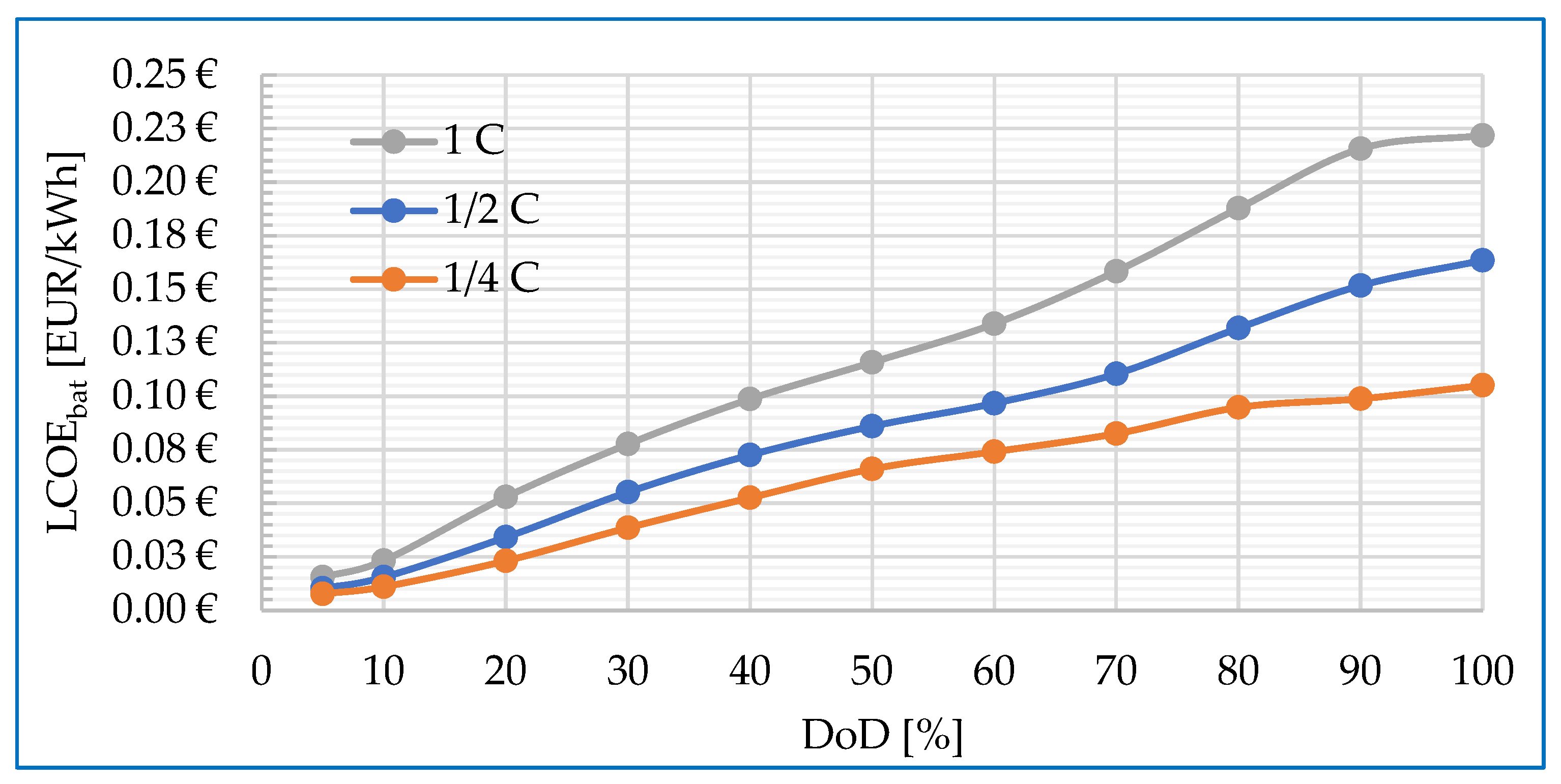
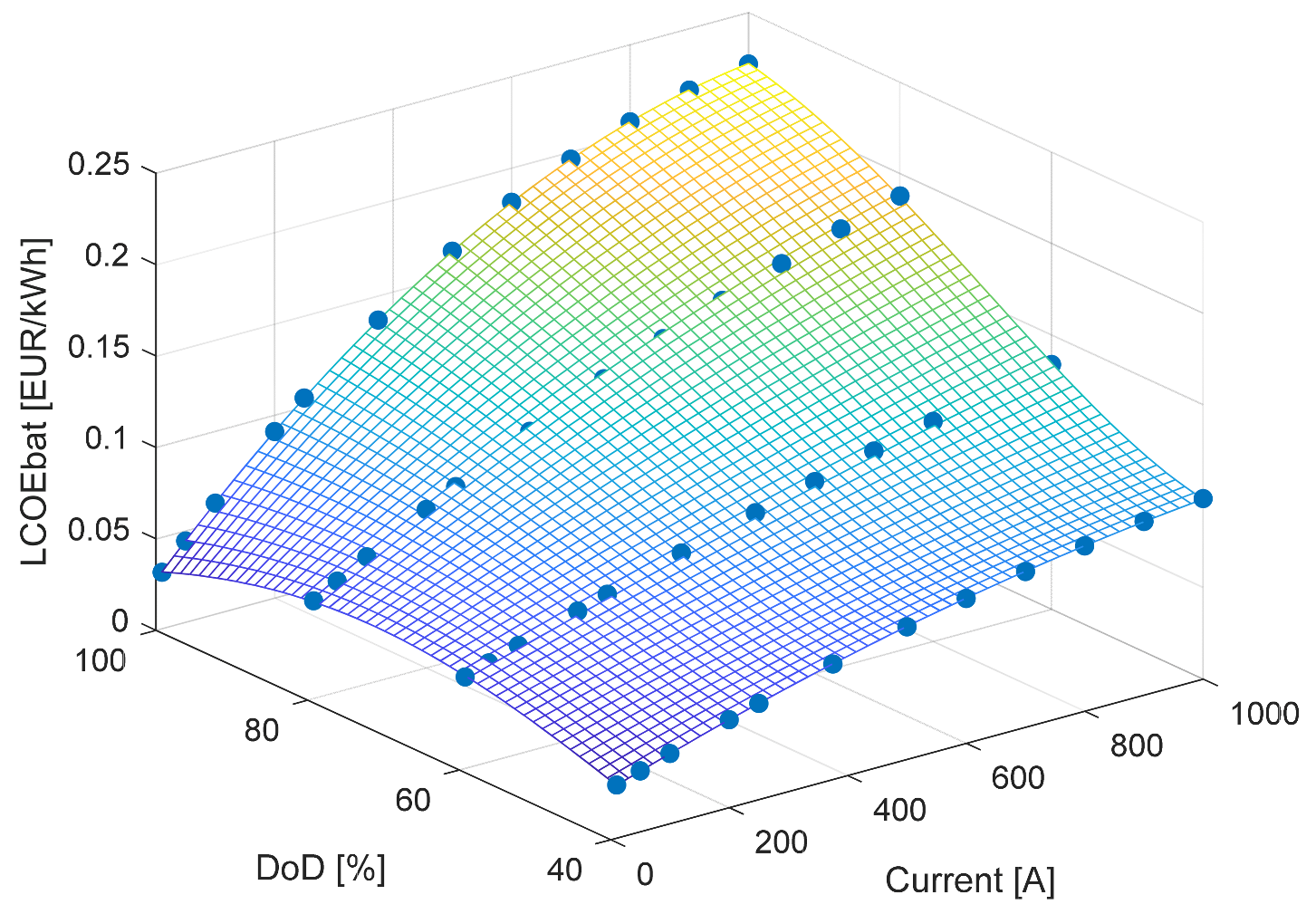
Furthermore, the data reports also validate the assumption that real-time intervention in the power sharing of the two distributed power sources is beneficial. It is evident that addressing the LCOE of system components is essential, as this unique metric provides a comprehensive overview of how cost-effective a given system element or technology is over its entire life cycle. The LCOE of the battery is particularly crucial, as energy storage fundamentally influences system operating costs, the degree of green energy utilization, and the level of energy independence.
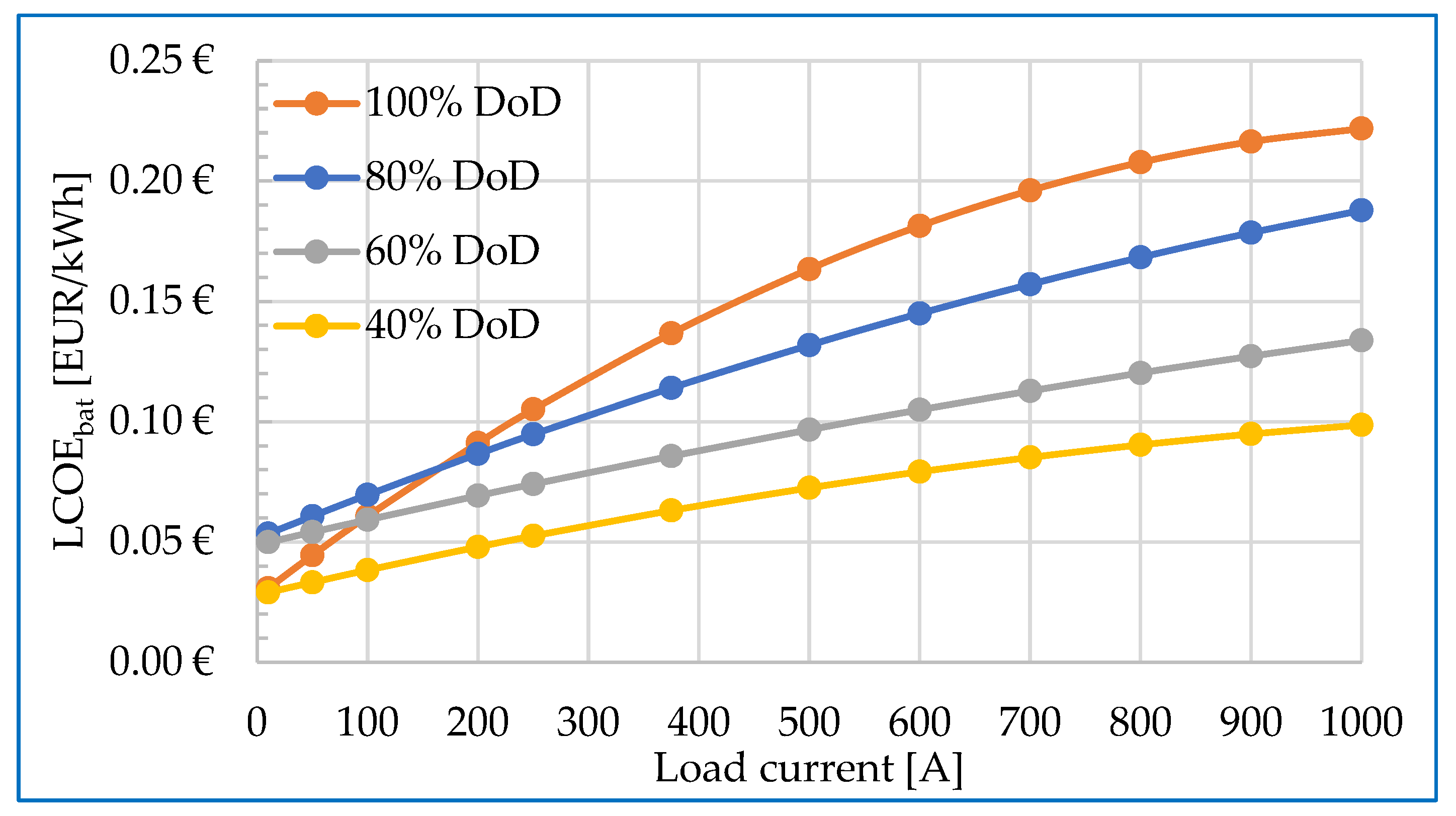
The LCOE of the battery considers not only the initial investment costs but also the total energy extracted over its lifetime, which is significantly affected by several factors such as depth of discharge (DoD), load current, and efficiency levels. By leveraging LCOE, it is possible to determine which operational strategies lead to the lowest LCOE, thereby enabling the economic optimization of the system.
Optimizing the battery’s LCOE is critical because it is directly linked to the dynamic regulation of the green energy ratio. During real-time intervention, the EMS can account for the current state and cost parameters of the battery, ensuring that increasing the green energy share is not only environmentally friendly but also economically sustainable. This is especially important in cases where poorly chosen operational strategies could significantly shorten the battery lifespan, leading to drastically increased costs in the long run.
Additionally, focusing on LCOE provides the opportunity to compare the economic efficiency metrics of different technologies and system components. As a result, system operators can make informed decisions about which energy sources or devices should be prioritized under given operating conditions. Understanding the LCOE of the battery, the LLC converter, and the solar panels enables the implementation of an optimal energy management strategy that achieves the lowest overall cost throughout the system’s entire life cycle.
The system does not necessarily require an LLC converter as a step-up DC/DC converter; other DC choppers can also be utilized. It is also possible to integrate battery packs with different voltage levels, but incorporating a DC chopper circuit is essential for the system, as the EMS must be adaptable to two distributed power converters. Currently, DC/DC converters and rectifiers are capable of regulating power levels in the hundreds of kilowatts, making it feasible to implement a higher-power system in practical applications.
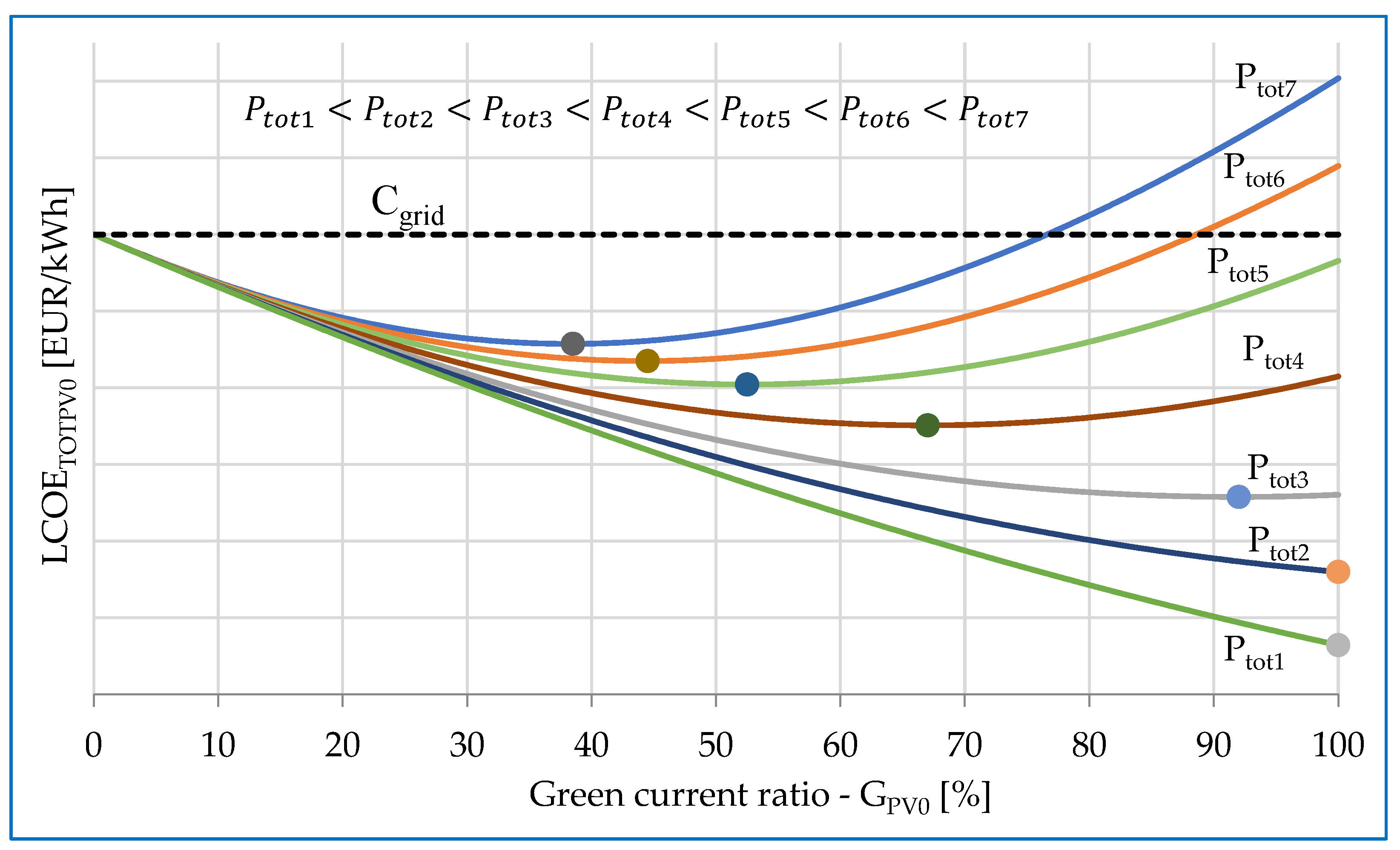
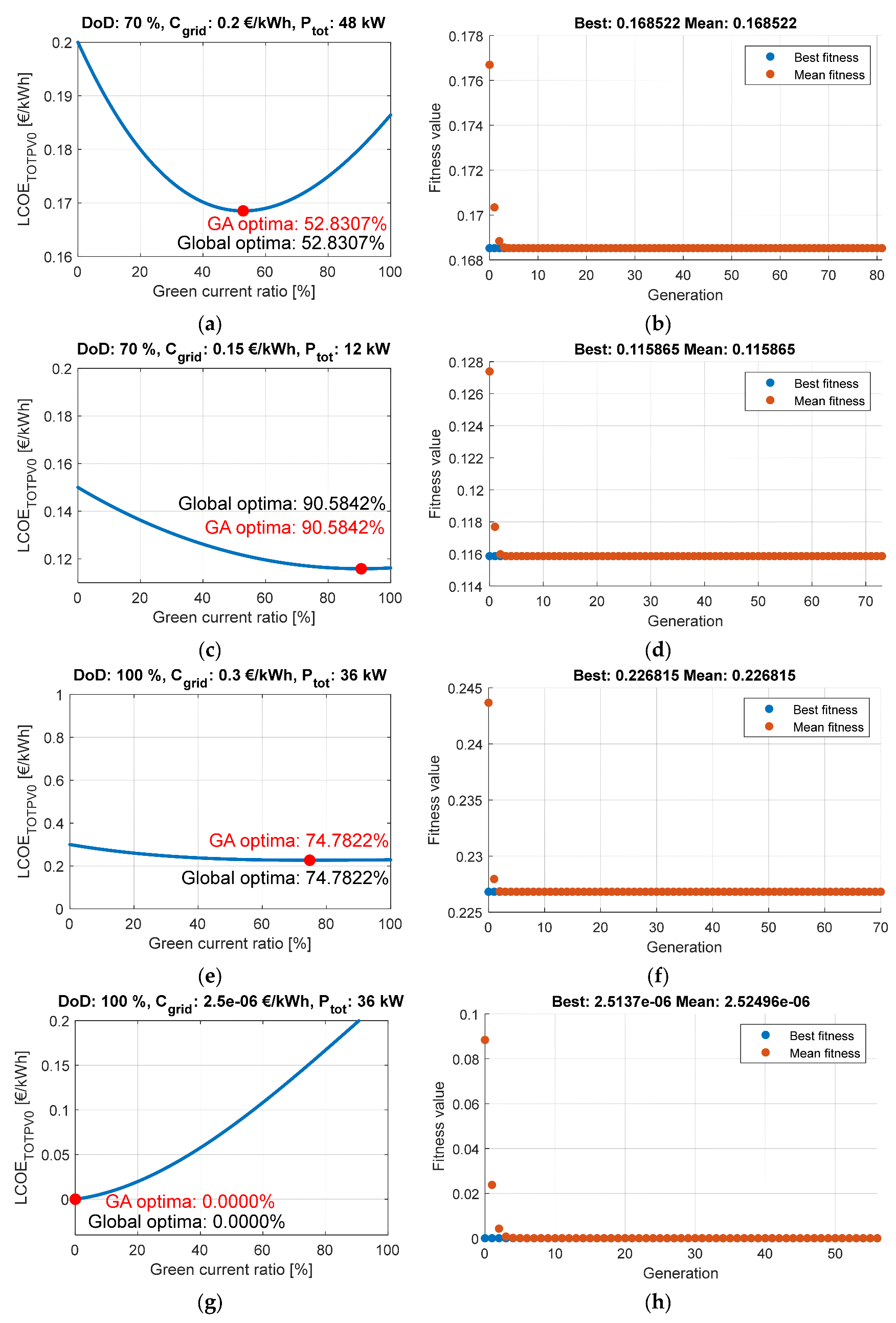
The economic calculations and reports were performed on discrete values in an Excel spreadsheet using both analytical and numerical methods, initially without optimization and later with a genetic algorithm. The obtained results were nearly identical: in the reports, the estimated total LCOE values differed by only about 0.015 EUR/kWh. Similarly, the optimal green energy ratios (GPV) showed negligible differences. Based on the presented results, it is evident that the requirements for the green current ratio controller are not stringent. The actual percentage value of the green current ratio does not need to be controlled with decimal precision; integer values are sufficient for system operation. However, the controller must ensure the voltage of the DC bus as accurately as possible.
In the future, numerous research opportunities remain in the field of intelligent, solar-powered hybrid UPS systems. Further studies are required to fine-tune the energy management algorithm, particularly in the areas of real-time decision-making and predictive control. The EMS could incorporate factors such as expected weather conditions, anticipated electricity prices, consumption patterns, load forecast, communication intermittencies, and planned shutdowns [
40,
41].
The identification algorithm of the intelligent control system could be further developed to accommodate three or more distributed generators. In this case, it would also be worthwhile to compare its effectiveness with droop control. In the coming years, as renewable energy sources continue to gain prominence, similar systems are expected to become increasingly intelligent and efficient, further enhancing the practical significance of these developments.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}