
Optimal Vehicle-to-Grid Charge Scheduling for Electric Vehicles Based on Dynamic Programming


Abstract
1. Introduction
2. Model for Simulation
2.1. Vehicle Efficiency Model
2.2. Time-of-Use Pricing Scenarios
3. Control Algorithm: Dynamic Programming
3.1. Optimal Control Problem
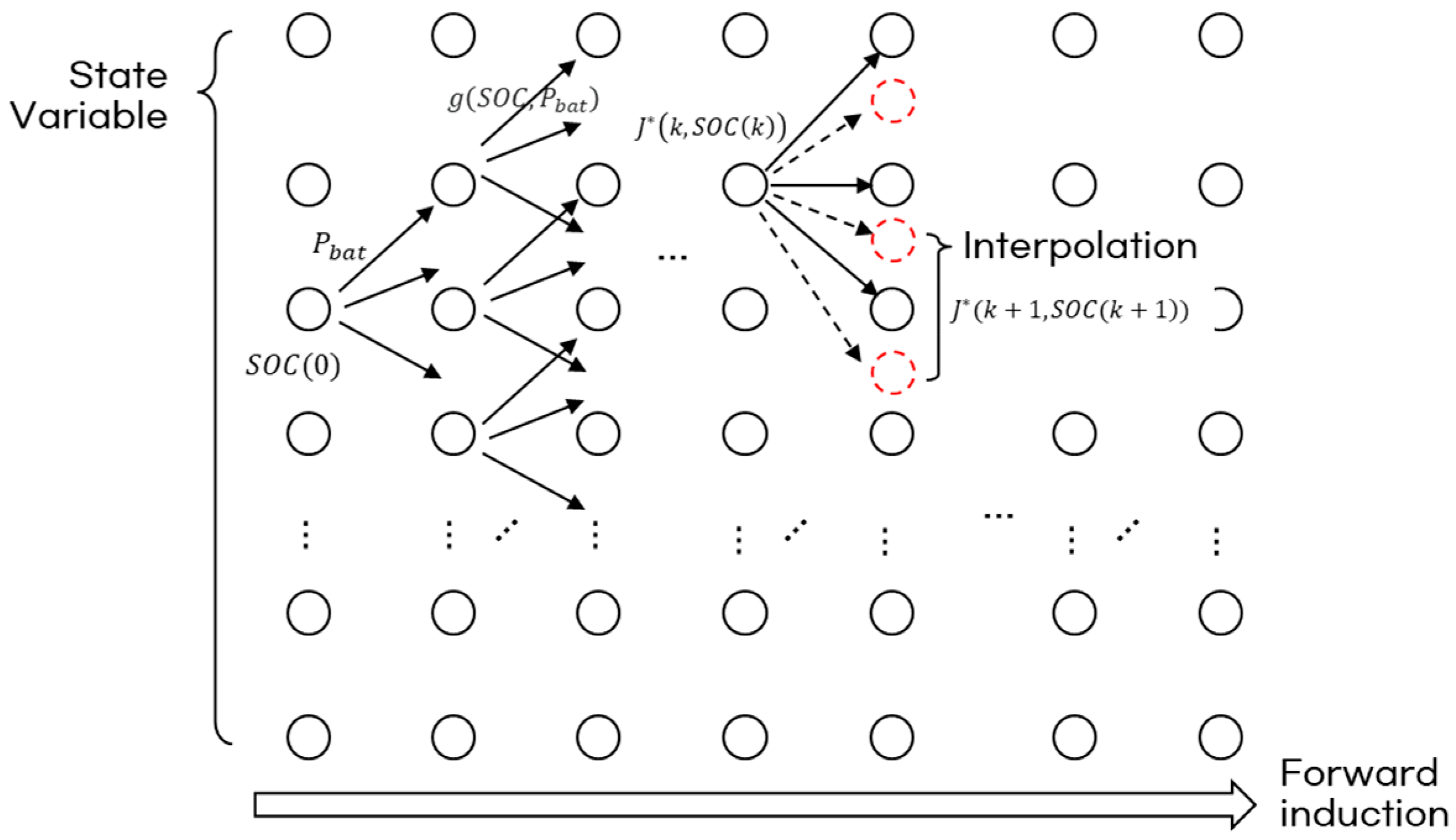
3.2. Dynamic Programming Algorithm
4. Simulation Results and Discussion
4.1. Case Studies for Different TOU Prices
4.2. Comparison Study with Linear Programming-Based Methods
4.3. Case Study for Effect of Battery Performance Degradation
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| V2G | Vehicle to Grid |
| EV | Electric Vehicle |
| DP | Dynamic Programming |
| SOC | State of Charge |
| TOU | Time-of-use |
References
- Dik, A.; Omer, S.; Boukhanouf, R. Electric Vehicles: V2G for Rapid, Safe, and Green EV Penetration. Energies 2022, 15, 803. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Morais, H.; Sousa, T.; Vale, Z.; Faria, P. Evaluation of the Electric Vehicle Impact in the Power Demand Curve in a Smart Grid Environment. Energy Convers. Manag. 2014, 82, 268–282. [Google Scholar] [CrossRef]
- Shi, R.; Li, S.; Zhang, P.; Lee, K.Y. Integration of Renewable Energy Sources and Electric Vehicles in V2G Network with Adjustable Robust Optimization. Renew. Energy 2020, 153, 1067–1080. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of Load Demand Due to EV Battery Charging in Distribution Systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of Electric Vehicles in Smart Grid: A Review on Vehicle to Grid Technologies and Optimization Techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Cao, Y.; Tang, S.; Li, C.; Zhang, P.; Tan, Y.; Zhang, Z.; Li, J. An Optimized EV Charging Model Considering TOU Price and SOC Curve. IEEE Trans. Smart Grid 2012, 3, 388–393. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal Scheduling of Vehicle-to-Grid Energy and Ancillary Services. IEEE Trans. Smart Grid 2012, 3, 351–359. [Google Scholar] [CrossRef]
- Ahn, C.; Li, C.T.; Peng, H. Optimal Decentralized Charging Control Algorithm for Electrified Vehicles Connected to Smart Grid. J. Power Sources 2011, 196, 10369–10379. [Google Scholar] [CrossRef]
- Sundström, O.; Binding, C. Flexible Charging Optimization for Electric Vehicles Considering Distribution Grid Constraints. IEEE Trans. Smart Grid 2012, 3, 26–37. [Google Scholar] [CrossRef]
- Khezri, R.; Steen, D.; Wikner, E.; Tuan, L.A. Optimal V2G Scheduling of an EV with Calendar and Cycle Aging of Battery: An MILP Approach. IEEE Trans. Transp. Electrif. 2024, 10, 10497–10507. [Google Scholar] [CrossRef]
- Bai, X.; Qiao, W. Robust Optimization for Bidirectional Dispatch Coordination of Large-Scale V2G. IEEE Trans. Smart Grid 2015, 6, 1944–1954. [Google Scholar] [CrossRef]
- Lunz, B.; Walz, H.; Sauer, D.U. Optimizing Vehicle-to-Grid Charging Strategies Using Genetic Algorithms under the Consideration of Battery Aging. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–7. [Google Scholar]
- Abdulaal, A.; Cintuglu, M.H.; Asfour, S.; Mohammed, O.A. Solving the Multivariant EV Routing Problem Incorporating V2G and G2V Options. IEEE Trans. Transp. Electrif. 2017, 3, 238–248. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Unit Commitment with Vehicle-to-Grid Using Particle Swarm Optimization. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–8. [Google Scholar]
- Kirk, D.E. Optimal Control Theory: An Introduction; Courier Corporation: Chelmsford, MA, USA, 2004; ISBN 0486434842. [Google Scholar]
- Škugor, B.; Deur, J. Dynamic Programming-Based Optimisation of Charging an Electric Vehicle Fleet System Represented by an Aggregate Battery Model. Energy 2015, 92, 456–465. [Google Scholar] [CrossRef]
- Xu, J.; Wong, V.W.S. An Approximate Dynamic Programming Approach for Coordinated Charging Control at Vehicle-to-Grid Aggregator. In Proceedings of the 2011 IEEE International Conference on Smart Grid Communications (SmartGridComm), Brussels, Belgium, 17–20 October 2011; pp. 279–284. [Google Scholar]
- Li, Z.; Wu, L.; Xu, Y.; Zheng, X. Stochastic-Weighted Robust Optimization Based Bilayer Operation of a Multi-Energy Building Microgrid Considering Practical Thermal Loads and Battery Degradation. IEEE Trans. Sustain. Energy 2022, 13, 668–682. [Google Scholar] [CrossRef]
- Ebrahimi, M.; Rastegar, M.; Mohammadi, M.; Palomino, A.; Parvania, M. Stochastic Charging Optimization of V2G-Capable PEVs: A Comprehensive Model for Battery Aging and Customer Service Quality. IEEE Trans. Transp. Electrif. 2020, 6, 1026–1034. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Niknam, T.; Fotuhi-Firuzabad, M. Stochastic Reconfiguration and Optimal Coordination of V2G Plug-in Electric Vehicles Considering Correlated Wind Power Generation. IEEE Trans. Sustain. Energy 2015, 6, 822–830. [Google Scholar] [CrossRef]
- Ovalle, A.; Hably, A.; Bacha, S. Optimal Management and Integration of Electric Vehicles to the Grid: Dynamic Programming and Game Theory Approach. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 2673–2679. [Google Scholar]
- Xie, S.; Zhong, W.; Xie, K.; Yu, R.; Zhang, Y. Fair Energy Scheduling for Vehicle-to-Grid Networks Using Adaptive Dynamic Programming. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1697–1707. [Google Scholar] [CrossRef]
- Shang, Y.; Li, Z.; Shao, Z.; Jian, L. Secure and Efficient V2G Scheme through Edge Computing and Federated Learning. In Proceedings of the 2022 4th International Conference on Smart Power and Internet Energy Systems, Beijing, China, 27–30 October 2022; pp. 2250–2255. [Google Scholar]
- Kim, H.; Myeong, H.; Park, I.; Choi, J.H.; Kim, K. Vehicle-to-Grid Charging Optimization of Electric Vehicle. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications (CCTA), Montreal, QC, Canada, 24–26 August 2020; pp. 1–6. [Google Scholar]
- Saldana, G.; Martin, J.I.S.; Zamora, I.; Asensio, F.J.; Onederra, O.; Gonzalez, M. Empirical Electrical and Degradation Model for Electric Vehicle Batteries. IEEE Access 2020, 8, 155576–155589. [Google Scholar] [CrossRef]
- Amir, S.; Gulzar, M.; Tarar, M.O.; Naqvi, I.H.; Zaffar, N.A.; Pecht, M.G. Dynamic Equivalent Circuit Model to Estimate State-of-Health of Lithium-Ion Batteries. IEEE Access 2022, 10, 18279–18288. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Level | Vehicle Efficiency | Algorithm | ||
|---|---|---|---|---|---|
| An EV | Aggregator (Grid) | Constant | SOC Dynamics | ||
| [8,9,12,14,15,17,18,19,20,21,22] | ✓ | ✓ | |||
| [10] | ✓ | ✓ | |||
| [11] | ✓ | ✓ (linearized) | MILP | ||
| [13] | ✓ | ✓ | |||
| Proposed Study | ✓ | ✓ | DP | ||
| Parameter | Discretization Level | Range |
|---|---|---|
| Battery SOC (%) | = 50 | [1, 99] |
| Power (kW) (One-Directional Charging) | = 51 | [0, 30] |
| Power (kW) (Bidirectional Charging) | = 51 | [−30, 30] |
| Time Step (h) | = 25 | [0, 24] |
| Case I | Case II | Case III | ||
|---|---|---|---|---|
| Initial and Final SOC | ||||
| Normal | (won) | 7136 | 7136 | 5061 |
| Total Energy (kWh) | 46.2 | 46.2 | 46.2 | |
| Mean Price (won/kWh) | 154.5 | 154.5 | 109.5 | |
| DP | Cost (won) | 5336 | 4981 | 3353 |
| Total Energy (kWh) | 44.0 | 45.2 | 44.6 | |
| Mean Price (won/kWh) | 121.3 | 110.2 | 75.2 | |
| Cost Saving of DP Compared to Normal (%) | 25.2 | 30.2 | 33.7 | |
| Case I | Case II | Case III | |
|---|---|---|---|
| Initial and Final SOC | , | ||
| Normal | 11,091 (won) | 11,091 (won) | 7868 (won) |
| DP | 8232 (won) | 8050 (won) | 5432 (won) |
| Cost Saving to Normal (%) | 25.8 | 27.4 | 31.0 |
| Initial and Final SOC | , | ||
| Normal | 2963 (won) | 2963 (won) | 2102 (won) |
| DP | 2281 (won) | 585 (won) | 1090 (won) |
| Cost Saving to Normal (%) | 23.0 | 80.3 | 48.2 |
| Average Cost Saving of DP Compared to Normal (%) * | 24.7 | 46.0 | 37.6 |
| Algorithm | Normal | MPC | DP | |||
|---|---|---|---|---|---|---|
| Cost (won) | 11,091 | 8269 | 8232 | 8225 | 8140 | 8138 |
| Total Energy (kWh) | 71.8 | 69.3 | 68.3 | 68.3 | 68.2 | 68.2 |
| Mean Price (won/kWh) | 154.5 | 119.3 | 120.5 | 120.4 | 119.4 | 119.3 |
| Cost Saving Compared to Normal (%) | - | 25.4% | 25.7% | 25.8% | 26.6% | 26.6% |
| Case I (, ) | |||
| Level of Degradation | Initial | 900 cycles | 1800 cycles |
| Cost (DP) | 8232 (won) | 6582 (won) | 5776 (won) |
| Battery Capacity, Charged (Ah) | 88.9 | 71.1 | 62.2 |
| Cost per Battery Capacity (won/Ah) | 92.6 | 92.6 | 92.9 |
| Case II (, ) | |||
| Level of Degradation | Initial | 900 cycles | 1800 cycles |
| Income Cost (DP) | 2120 (won) | 1681 (won) | 1423 (won) |
| Percent Cost Compared to Initial (%) | - | 79.3 | 67.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Kim, H.; Kim, H.; Kim, H. Optimal Vehicle-to-Grid Charge Scheduling for Electric Vehicles Based on Dynamic Programming. Energies 2025, 18, 1109. https://doi.org/10.3390/en18051109
Lee H, Kim H, Kim H, Kim H. Optimal Vehicle-to-Grid Charge Scheduling for Electric Vehicles Based on Dynamic Programming. Energies. 2025; 18(5):1109. https://doi.org/10.3390/en18051109
Chicago/Turabian StyleLee, Heeyun, Hyunjoong Kim, Hyewon Kim, and Hyunsup Kim. 2025. "Optimal Vehicle-to-Grid Charge Scheduling for Electric Vehicles Based on Dynamic Programming" Energies 18, no. 5: 1109. https://doi.org/10.3390/en18051109
APA StyleLee, H., Kim, H., Kim, H., & Kim, H. (2025). Optimal Vehicle-to-Grid Charge Scheduling for Electric Vehicles Based on Dynamic Programming. Energies, 18(5), 1109. https://doi.org/10.3390/en18051109