

Optimization of Fault Current Limiter Reactance Based on Joint Simulation and Penalty Function-Constrained Algorithm

Abstract
1. Introduction
2. Materials and Methods
2.1. Working Principle of FSFCL
2.2. Current-Limiting Reactor Inductance Optimization Model
2.2.1. Objective Solution Model for Current-Limiting Reactance Value
- (1)
- Short-Circuit Current Constraint
- (2)
- Overvoltage constraint
2.2.2. Objective Optimization Mode Based on the Penalty Function Method
3. Results and Discussion
3.1. Joint Simulation Method Based on ATP and SIMULINK
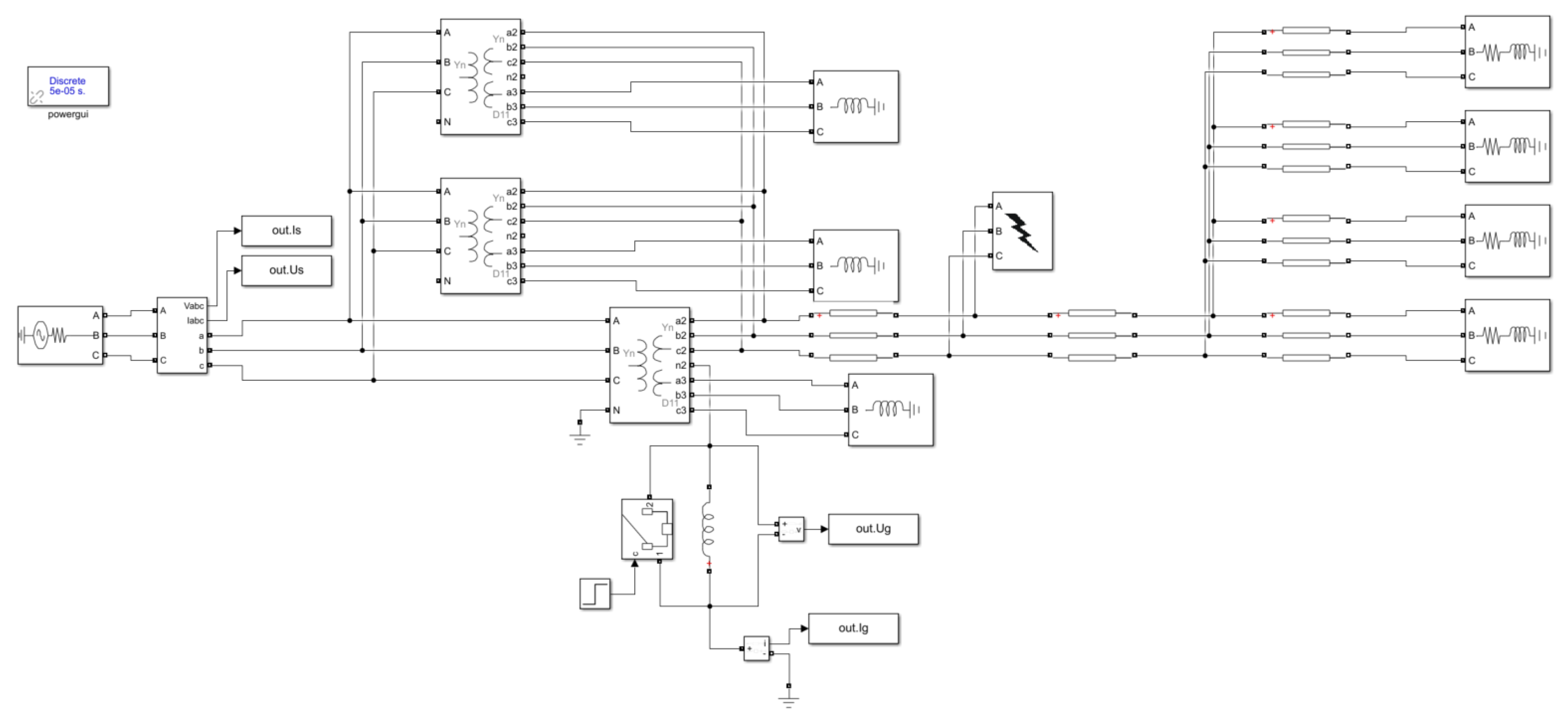
3.1.1. Simulink Short-Circuit Current Simulation Calculation
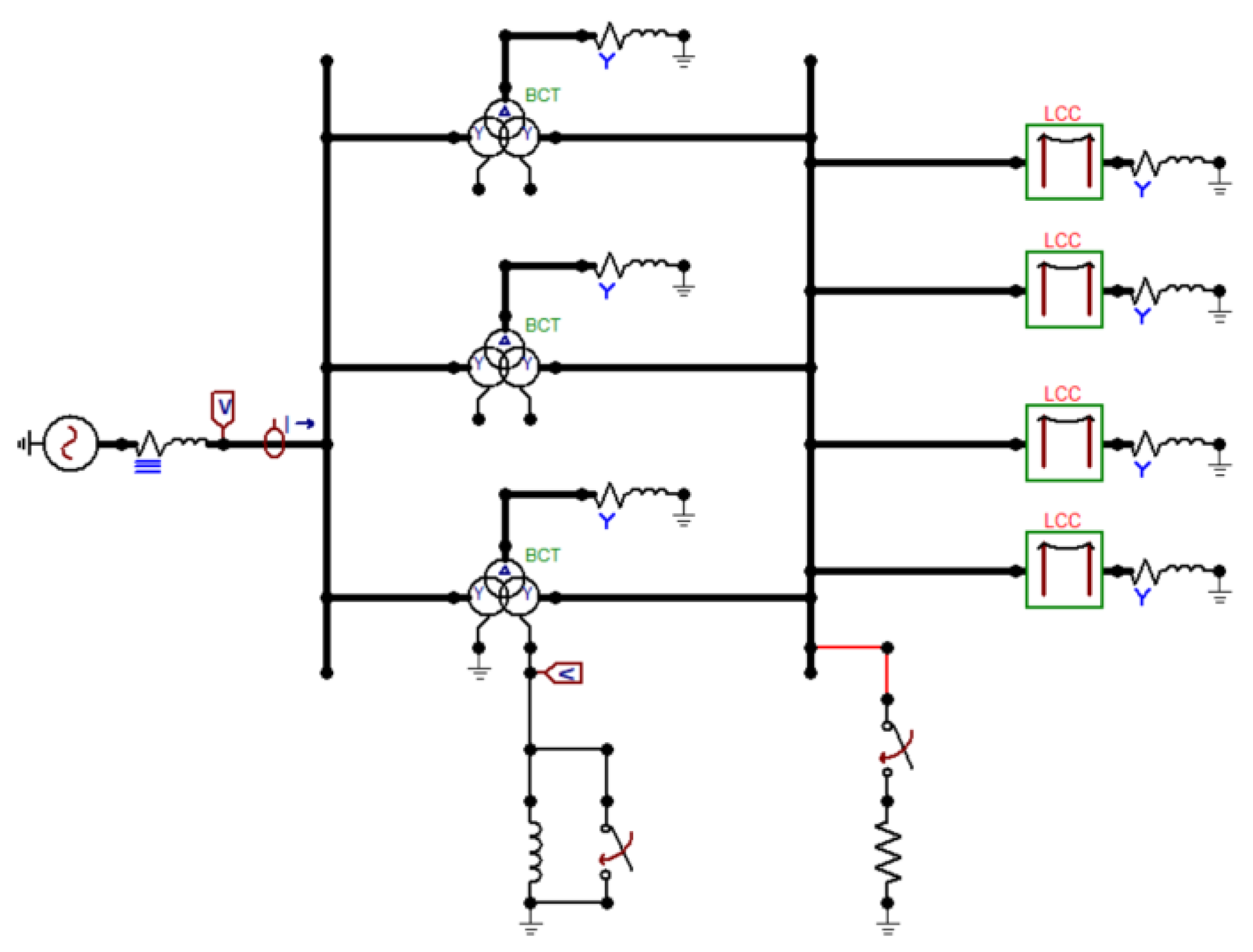
3.1.2. ATP-EMTP Overvoltage Simulation Calculation
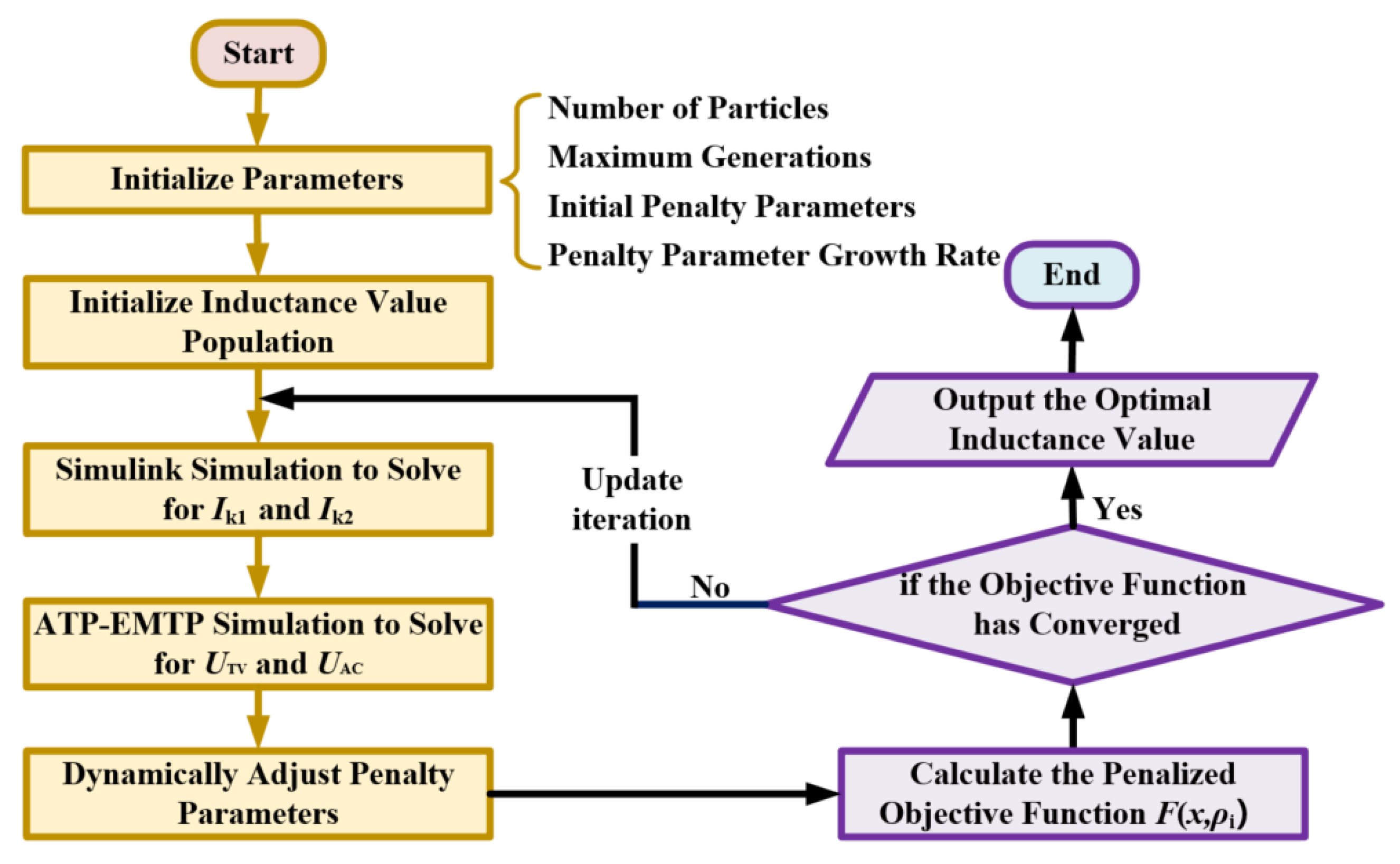
3.1.3. Joint Simulation Method of ATP-EMTP and MATLAB
3.2. Gravitational Search Algorithm-Based Optimization with Joint Simulation and Comparative Analysis
3.2.1. Gravitational Search Algorithm-Based Optimization with Parameter Adaptation and Performance Comparison
3.2.2. Gravitational Search Algorithm Key Parameter Settings
3.3. Case Study Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, Y.; Wei, M.; Lyu, P.; Yang, G.; Wang, C. A practical modeling method for new energy stations applicable to asymmetric fault short-circuit calculation. Power Grid Technol. 2024, 48, 4788–4795. [Google Scholar]
- Liu, Y. Analysis and treatment of low-voltage short-circuit faults in 220 kV main transformers. Hebei Electr. Power Technol. 2017, 36, 53–55. [Google Scholar]
- Zheng, S.; Liu, H.; Zhu, S. Two-step optimization method for limiting measures of three-phase and single-phase short circuits. Electr. Meas. Instrum. 2019, 56, 70–75+81. [Google Scholar]
- Han, B.; Chen, W.; Chang, N.; Jin, Y.; Qie, X.; Han, Y.; Zhu, B.; Tan, S.; Yu, Y.; Zhang, J.; et al. Research on short-circuit current limitation method based on system topology dynamic adjustment. Grid Technol. 2021, 45, 1158–1166. [Google Scholar]
- Zhao, E.; Han, Y.; Liu, Y.; Zalhaf, A.S.; Wang, C.; Yang, P. Feasibility analysis of neutral grounding by small reactor of HVDC converter transformer. Energy Rep. 2022, 8 (Suppl. S1), 392–399. [Google Scholar] [CrossRef]
- Chen, T.; Li, B.; Han, Y.; Li, Q.; Wang, J.; Jin, J. Research on fault line selection of small current grounding system considering zero sequence unbalanced current. Electr. Porcelain Light. Arrester 2022, 124–130. [Google Scholar]
- Liu, J.; Yuan, J.; Zhou, H.; Li, X.; Mo, Z. Parameter design of short-circuit fault limiter considering the transient component of short-circuit current in high-voltage AC systems. High Volt. Technol. 2024, 50, 3769–3785. [Google Scholar]
- Wang, W.; Zhao, Y.; Xu, Y.; Lv, W.; Yang, B.; Fang, T. Canister-type rapid switch for 500 kV fast switching fault current limiter. High Volt. Technol. 2023, 49, 803–811. [Google Scholar] [CrossRef]
- Im, I.G.; Choi, H.S.; Jung, B.I. Limiting characteristics of the superconducting fault current limiter applied to the neutral line of conventional transformer. Phys. C Supercond. 2013, 494, 339–343. [Google Scholar] [CrossRef]
- Sahebi, A.; Samet, H. Discrimination between internal fault and magnetizing inrush currents of power transformers in the presence of a superconducting fault current limiter applied to the neutral point. IET Sci. Meas. Technol. 2016, 10, 537–544. [Google Scholar] [CrossRef]
- Gong, X.; Gao, C.; Long, Z.; Lin, Y.; Xu, L. Principle of asymmetric short-circuit current limitation by adding a small reactance at the neutral point of 500kV auto-transformer. Electr. Power Constr. 2013, 34, 56–60. [Google Scholar]
- Xu, M. Research on Modeling and Application of Complex High Coupling Split Reactor for Fault Current Limiter. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2020. [Google Scholar]
- Han, N.; Jia, X.; Zhao, X.; Xu, J.; Zhao, C. A new topology of hybrid DC fault current limiter. Proc. Chin. Soc. Electr. Eng. 2019, 39, 1647–1658+1861. [Google Scholar]
- Hong, J.; Guan, Y.; Xu, G. Selection of fault current limiter installation position and parameter calculation in large power grids. High Volt. Appar. 2010, 46, 62–66. [Google Scholar]
- Hu, J.; Li, X.; Yang, Y.; Bao, X.; Li, J. Analysis of neutral grounding overvoltage of 220 kV transformer. Electr. Porcelain Light. Arrester 2019, 152–158. [Google Scholar]
- Xu, D. Research on Fault Current Limiter Based on Fast Switch. Master’s Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar]
- Q/GDW169-2008; Oil-immersed Transformers (Reactors) Condition Evaluation Guide. State Grid Corporation of China: Beijing, China, 2008.
- GB 311.1-2012; Insulation Coordination Part 1: Definitions, Principles and Rules. Standardization Administration of China: Beijing, China, 2012.
- Jia, L.; Li, W.; Zhao, C. Numerical optimization design of vehicle cooling fan based on penalty function method. Mech. Des. Manuf. 2020, 201–205+210. [Google Scholar]
- Zhang, B.; Zhang, W.; Guo, S.; Wang, X.; Li, T. Simulation calculation of transformer differential current containing non-periodic components in external short circuits. Hebei Electr. Power Technol. 2023, 42, 82–85+94. [Google Scholar]
- Zhao, H.; Zhang, X.; Cao, W.; Cheng, Z.; Gao, S. Study on overvoltage protection of ultra-high voltage transformer neutral point grounded through a small reactance. Insul. Surge Arresters 2022, 109–115. [Google Scholar]
- Zhang, W.; Ding, Q.; Hu, G.; Qiao, Z.; Ma, X. Research on lightning overvoltage protection scheme of distribution transformer based on ATP-EMTP simulation analysis. Electr. Porcelain Light. Arrester 2020, 86–92. [Google Scholar]
- Kang, S.; Feng, W.; Qin, Z.; Jia, H. Overvoltage analysis of fast power supply restoration for transformers with ungrounded neutral points after faults. Hebei Electr. Power Technol. 2019, 38, 5–8. [Google Scholar]
- Si, C.; Lan, T.; Hu, J.; Wang, L.; Wu, Q. Discussion on the penalty coefficient in the penalty function. Control. Decis. 2014, 29, 1707–1710. [Google Scholar]
- Aditya, N.; Mahapatra, S.S. An adaptive gravitational search algorithm for optimizing mechanical engineering design and machining problems. Eng. Appl. Artif. Intell. 2024, 138, 109298. [Google Scholar] [CrossRef]
- Roy, A.; Verma, V.; Gampa, S.R.; Bansal, R.C. Planning of distribution system considering residential rooftop photovoltaic systems, distributed generations and shunt capacitors using gravitational search algorithm. Comput. Electr. Eng. 2023, 111, 108960. [Google Scholar] [CrossRef]
- Shukla, A.; Momoh, J.A. Pseudo inspired gravitational search algorithm for optimal sizing of grid with integrated renewable energy and energy storage. J. Energy Storage 2021, 38, 102565. [Google Scholar] [CrossRef]
- Omkar, S.; Arabinda, G.; Kumar, A.R. Estimation of parameters of one-diode and two-diode photovoltaic models: A chaotic gravitational search algorithm-based approach. Energy Sources Part A Recovery Util. Environ. Eff. 2023, 45, 5938–5956. [Google Scholar]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO): A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Coello, C.A. An updated survey of GA-based multiobjective optimization techniques. ACM Comput. Surv. (CSUR) 2000, 32, 109–143. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, B.; Wang, Y. Day-ahead reactive power optimization scheduling strategy for active distribution networks considering operating condition prediction errors. J. North China Electr. Power Univ. (Nat. Sci. Ed.) 2024, 51, 31–40. [Google Scholar]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Sareni, B.; Krahenbuhl, L. Fitness sharing and niching methods revisited. IEEE Trans. Evol. Comput. 1998, 2, 97–106. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, R. Simulated binary crossover for continuous search space. Complex Syst. 1995, 9, 115–148. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Average Convergence Iterations | Optimal Solution x (mH) | Solution Std. Dev σ (mH) | Computation Time (s) |
|---|---|---|---|---|
| GSA | 83 | 15.9 | <0.01 | 948.1 |
| GA | 33 | 15.9 | <0.01 | 363.7 |
| PSO | 134 | 15.9 | <0.01 | 1436.8 |
| Algorithm | Global Optimal Solution Hit Rate |
|---|---|
| GSA | 92% |
| GA | 78% |
| PSO | 67% |
| kn0 | Average Convergence Iterations | Optimal Solution x (mH) |
|---|---|---|
| 0.001 | 82 | 8.9 |
| 0.01 | 83 | 14.1 |
| 0.1 | 83 | 15.7 |
| 1 | 83 | 15.9 |
| 10 | 82 | 15.9 |
| 100 | 83 | 15.9 |
| Fault Conditions | High-Voltage Side Winding Current (kA) | Medium-Voltage Side Winding Current (kA) | Low-Voltage Side Winding Current (kA) |
|---|---|---|---|
| Single-phase ground fault | 0.92 | 2.78 | 7.05 |
| Two-phase ground fault | 1.80 | 2.85 | 4.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Xing, C.; Zhang, Z.; Liang, B.; Sun, L.; Wei, B.; Qin, W.; Gao, S. Optimization of Fault Current Limiter Reactance Based on Joint Simulation and Penalty Function-Constrained Algorithm. Energies 2025, 18, 1077. https://doi.org/10.3390/en18051077
Zhao J, Xing C, Zhang Z, Liang B, Sun L, Wei B, Qin W, Gao S. Optimization of Fault Current Limiter Reactance Based on Joint Simulation and Penalty Function-Constrained Algorithm. Energies. 2025; 18(5):1077. https://doi.org/10.3390/en18051077
Chicago/Turabian StyleZhao, Jun, Chao Xing, Zhigang Zhang, Boyuan Liang, Lu Sun, Bin Wei, Weiqi Qin, and Shuguo Gao. 2025. "Optimization of Fault Current Limiter Reactance Based on Joint Simulation and Penalty Function-Constrained Algorithm" Energies 18, no. 5: 1077. https://doi.org/10.3390/en18051077
APA StyleZhao, J., Xing, C., Zhang, Z., Liang, B., Sun, L., Wei, B., Qin, W., & Gao, S. (2025). Optimization of Fault Current Limiter Reactance Based on Joint Simulation and Penalty Function-Constrained Algorithm. Energies, 18(5), 1077. https://doi.org/10.3390/en18051077