Abstract
The sun tracker plays a major role in improving the energy efficiency of a solar power system. To address this role, this study experimentally explores the energy efficiency of three sun-tracking systems with three types of degrees of freedom (DOFs)—namely, single-axis for both elevation (1DOF_Elev) and azimuth (1DOF_Azim), and dual-axis (2DOF)—integrated in photovoltaic (PV) panels. The three sun-tracking configurations are assessed and compared with the fixed system (0DOF), considering both the net electricity output of the studied photovoltaic system and the energy consumption of each configuration during operation. To accomplish this objective, hardware and software tools were deployed to create a prototype. The sun-tracking techniques are based on the sun position algorithm (astronomical calculations). The different data (time, voltage, current, power, azimuth, and elevation) are stored in real time within a locally developed database which represents crucial data within SCADA systems embedded in smart grids. The results revealed that the 2DOF system exhibits the highest energy efficiency (37.23%), followed by 1DOF_Azim (12.86%), and then by 1DOF_Elev (10.05%), when compared to 0DOF. Overall, this study provides solutions for optimizing photovoltaic energy production and could be integrated into battery-powered devices to accelerate battery recharging, achieving time savings of over 30%.
1. Introduction
Sun trackers are key devices in adjusting the position of solar collectors towards the sun to maximize the solar energy collected and hence improving their efficiency [1]. In the literature, many previous works confirmed this role. Certainly, according to Mousazadeh et al. [2], sun trackers can improve the absorbed energy by 10 to 100% across different geographical locations and seasons. Eke et al. [3] noted that a sun-tracking system, compared to a latitude tilt fixed system, could increase the annual photovoltaic electricity output of a 7.9 kW photovoltaic (PV) system installed at Mugla University by 30.79%. Similarly, experimental studies by Khalifa et al. [4] and Abdallah et al. [5] on different solar collectors revealed that the solar energy collected was higher than that of fixed collectors, with increases of 75% and 41.34%, respectively. Thanks to these incontestable performances, sun-tracking systems are widely incorporated into commercial-scale solar installations around the globe. This diversity in design has led to extensive research and analysis by numerous experts, since their first use in 1927 [6]. From a state-of-the-art perspective, sun-tracking systems have been grouped based on various parameters such as control and tracking strategies, drives, and degrees of freedom [7,8].
In the literature, these systems are classified into three technological classes: thermo-hydraulic actuator mechanisms [9], bimetallic thermal actuator mechanisms [10], and shape memory alloy thermal actuator mechanisms [11]. However, they can mainly be divided into two types: passive and active trackers. Passive trackers are typically used for PV systems, as they do not require any electrical energy or mechanical drives. They operate based on autonomous physics phenomena to create motion. In contrast to passive trackers, active trackers use sensors, predefined algorithms, and electrical motors to predict or calculate the sun’s current position and adjust the reflector’s alignment so that the collector’s normal vector is perpendicular to the sun’s rays [12]. Depending on their tracking strategy, active trackers can be categorized into two types [13]: astronomical trackers and electro-optical sensor-based trackers. Astronomical trackers operate solely on calculations of the apparent sun’s position, using predefined geometric and astronomical equations. This method, also known as an open loop or blind technique, relies exclusively on ephemeris calculations without direct measurements of the sun’s position. It requires manual adjustments to set the latitude, date, and time on the first day of operation. Subsequent automatic computations and commands are handled by a preprogrammed processor, regardless of external conditions such as wind speed or climate changes. For example, Canada et al. [14] developed an automatic device to measure global irradiance, total atmospheric optical thickness, aerosol optical depth, and direct irradiance. This tracker was developed using C++ builder and based on the mathematical correlations proposed by Blanco-Muriel et al. [15]. Similarly, Alata et al. [16] introduced a new open loop sun-tracking system using a fuzzy model to represent the mathematical equations for determining the sun’s position in Amman, Jordan. They designed three tracking systems: one-axis tracking, equatorial tracking, and azimuth/elevation tracking.
On the other hand, electro-optical sensor-based trackers, unlike open loop technique-based trackers, rely on tangible feedback from electro-optical sensors such as light sensors, photo-resistors, and PV cells. This method, known as the closed loop technique, operates by adjusting the solar collector’s position to ensure that the illumination on the light sensors is balanced. To assess the pertinence of this sensor tracking approach, Boukdir et al. [17] have developed a new dual-axis solar tracker that uses three Light Dependent Resistors (LDRs) as optical sensors: one on the left, one on the right for azimuthal tracking, and a central one for elevation tracking.
Far from the technical classification of solar tracking systems based on the technique deployed to control the mechanical movement, several other painstaking publications assessed the economic and energy impacts of different tracking approaches based on the system’s degree of freedom. Indeed, based on this criterion, sun trackers can be classified in two categories: single-axis and dual-axis trackers. The working principle of the former is to rotate the solar collector around a single horizontal, vertical, polar, or inclined axis to reduce the incidence angle as much as possible [18]. However, this technique is difficult to apply in large-scale plants because of high costs and land requirements [19].
Several researchers have explored, through simulations or experiments, ways to find a balance between different tracking modes. Their goal is to maximize the benefits of each approach while minimizing their drawbacks. For instance, through a series of numerical simulations comparing five tracking configurations, Maia et al. [1] have confirmed that the dual-axis sun-tracking mode remains the best option to enhance an installation’s thermal efficiency. Ai et al. [20] have proposed and compared two sun-tracking methods to optimize a PV system’s performance in Er-Lian-Hao-Te city, China.
The proposed strategies involve varying the azimuth of the tracking plan and the hour angle three times a day, respectively. The results confirmed the clear advantage of tracking approaches over fixed ones, with one-axis azimuth three-step tracking and hour angle three-step tracking capturing 66.5% and 63.3% more solar radiation compared to a horizontal surface, respectively. Fathabadi [21] proposed a precise dual-axis sun-tracking system that optimizes PV module orientation by calculating maximum power output and real-time sun angles.
For instance, Ghassoul [22] has proposed a new approach that reduces the frequency of PV module rotation, cutting energy consumption by 20%. Meanwhile, it enhances the energy extraction by about 40% compared to fixed PV installations. With the same perspective, Achkari and El Fadar [23] developed a sun-tracking method that activates only when the thermal energy gained exceeds the electrical energy required to move the collector, ensuring optimal net energy gain.
According to the literature review, one can conclude that various solar tracking systems have been extensively studied and developed to optimize energy production and efficiency.
However, most studies were conducted without digitization, where the solar astronomical coordinates of the panel positions are stored in a database that can later be utilized for IoT and artificial intelligence applications. Moreover, these studies failed to consider the internal parasitic energy consumption of the implemented SPT systems.
To address this research gap, this paper conducts an energy analysis of a PV installation in Tetouan city (35.5784° N, 5.36837° W), Morocco. The realized prototype consists of three PV panels equipped with different solar tracking modes along with a fixed PV panel. The energy data from the photovoltaic panels is recorded in real time, in a local database, through experimentation involving a solar tracking system and an algorithm based on the sun’s astronomical position. The energy efficiency of the three sun-tracking configurations with three types of degree of freedom (DOF)—single-axis for both elevation and azimuth (1DOF_Elev and 1DOF_Azim), and dual-axis (2DOF)—has been assessed and compared with that of a stationary system (0DOF), considering the electrical production of the PV system and the electrical consumption of the tracking device. This study contributes to achieving a more thorough understanding of the practical implications of such an installation and optimizes the PV system’s performance for greater efficiency and sustainability. Additionally, this study aims to investigate the performance of various solar tracking technologies in terms of power generation, using a software program based on astronomical calculations to determine the position of the solar panels relative to the sun.
This study also considers the internal energy consumption of each system, as this information helps enhance the accuracy of energy optimization—particularly when a system consumes more energy than it generates. In such cases, the system is switched to a rest interval mode, placing the servo motors in standby mode.
2. Research Methodology
The research methodology is divided into several parts and subparts, as illustrated in a summarized flow diagram (Figure 1). Following the literature review, this research focuses on measuring and quantifying energy values generated by solar panels equipped with various sun-tracking systems (featuring four degrees of freedom), processing the data using a planned program uploaded to a microcontroller, and transmitting the measurements to a local database. Subsequently, the results are analyzed by calculating the energy efficiency of each system in comparison with a fixed panel, and the primary overall phases of the study are also presented in graphical form.
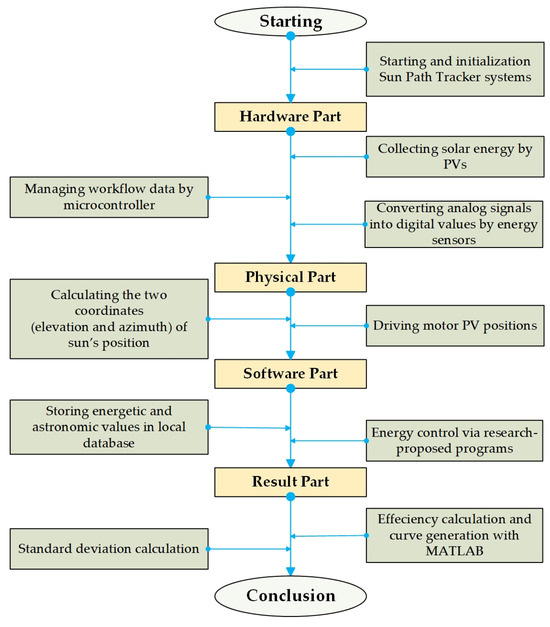
Figure 1.
Flow chart of research methodology.
The microcontroller ESP32 MCU (Micro Controller Unit; Espressif Systems, Shanghai, China) used in this study plays an important role in the experiment by having a General-Purpose Input/Output (GPIO) pin and can be assigned to an internal or external peripheral signal. However, the MCU handles data workflow input and output, which are shown in Table 1, within the solar tracking system, managing several critical phases of data processing. Figure 2 illustrates the main components used to build the test prototypes by the authors.

Table 1.
Inputs and outputs data parameters of sun path tracker system.
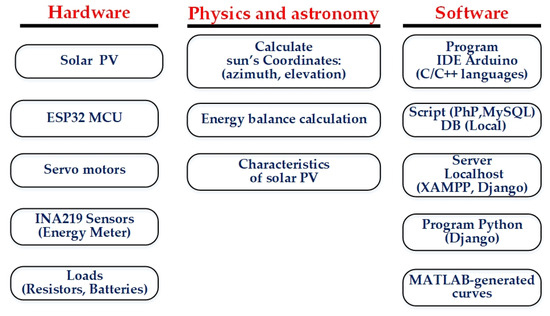
Figure 2.
Main tools of research.
As illustrated in Figure 2, the primary tools employed in this research include hardware, software, and some astronomical parameters (sun’s azimuth and elevation) that were used to calculate the positions of the motors based on the sun’s movement. These calculated positions are then used to program the motor commands through the microcontroller.
The respective parts of this research are detailed as follows (Figure 3):
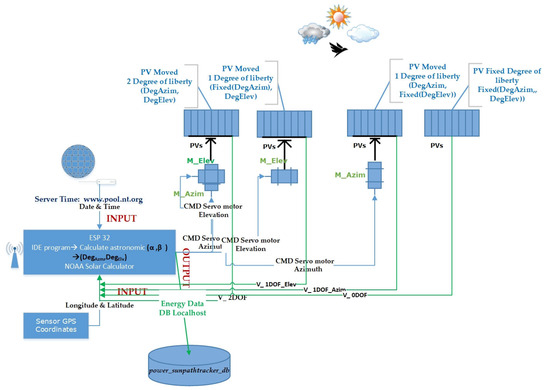
Figure 3.
Detailed functional diagram with local database of SPT.
- (a)
- Electronic part:
- Controlling the sun path tracker (SPT) system using a microcontroller.
- Collecting photovoltaic energy data using INA 219 sensor (Texas Instruments, Dallas, TX, USA), which communicates with the MCU via the I2C bus.
- Converting the energy data, via sensors, into digital values using the Analog-to-Digital Converter (ADC) mapping function provided in the Arduino IDE.
- (b)
- Astronomical part:
- Calculating the two coordinates (elevation and azimuth) of sun’s position as expressed by Equations (1)–(3).
- Driving motor PV positions, these coordinates are also converted into digital values using the mapping function provided in the Arduino IDE.
- (c)
- Software part:
- Connecting and initializing by retrieving the current time through the ESP32 MCU from www.pool.nt.org website.
- Verifying the connection to a local database named power_sunpathtarcker_db.
- Storing continuously all energy-related data along with astronomical parameters in the local database during the day.
- (d)
- Result part:
- Extracting the energy data from the local database.
- Calculating energy efficiency and standard deviation.
- Generating performance curves using MATLAB r2019a and Python 3.11.
3. Experimental Procedure and Measurement Setup
This section focuses on the experimental procedure involving the mounting and calibration setup of the PV orientations and how to correct the errors of servo motor positions via a program in C++ before starting the measurements of the four SPTs.
3.1. Calibration of PV Orientations and Correction of Energy Data Readings
This calibration process is also used when implementing this research on a robot car (Figure 4a) in an upcoming work (90% of project is completed): a compass is used as a natural orientation reference. For example, to correct the position of the elevation SM (1DOF_Elev), the value 13 must be added in the function of the command (Figure 4b, line 139 in C++ program) to compensate for the position error via the program.
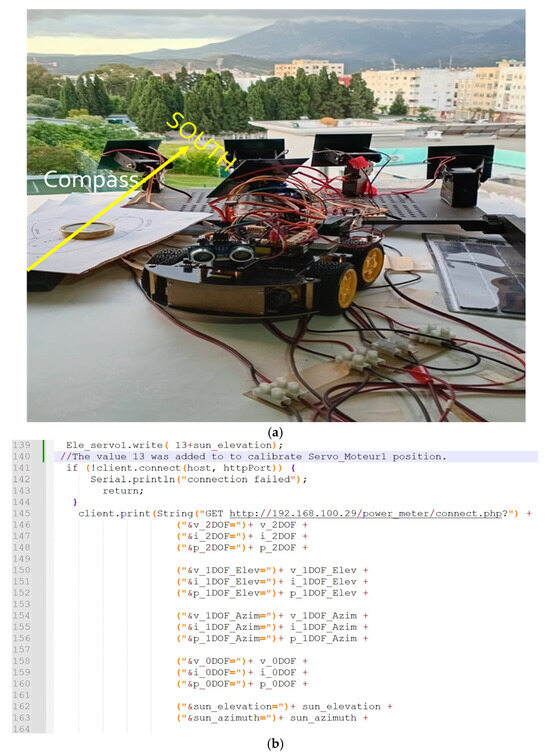
Figure 4.
Calibration of PV orientations using Compass and Program: (a) Orientation of the robot’s position first toward the south to follow the sun from east to west; (b) In this case, the value 13 was added to readjust the initial position error of the SM1.
Concerning the voltage measurements of the four solar panels, occasional calculation errors may arise, either from the voltage sensors themselves or within the GPIO ADC chain of the ESP32 microcontroller. To address this issue, a subroutine should be implemented that applies Equation (1) to linearize the DC readings, thereby improving measurement accuracy.
For the function Analog_Read (pins), the reference voltage (r) is 3.3 V, meaning the maximum reading corresponds to 3.3 V = 4095 within the range of 0 to 4095.
where denotes the voltage reading from the ESP32 analog pins and symbolizes
- = 3.41 × 10−2
- = 1.11 × 10−3
- = 3.01 × 10−7
- = 1.18 × 10−10
- = 1.60 × 10−14
3.2. In-Depth Study of Experimental Research
One of the key tasks of this research is the control of the servo motors in the sun tracker using the program based on the C/C++ languages developed in this study, which relies on the astronomical model (Equations (2)–(4)), by converting sun coordinates (azimuth and elevation) into numerical values to control the movement of the PV panels and hence maximize the solar energy capture. This can be achieved through minimizing the incidence angle θ, defined as the angle between the beam radiation on the solar panel surface and the normal to this surface, which is given by Equation (2).
where β denotes collector tilt angle, αs is the solar altitude angle, γs is the solar azimuth angle, γ is the surface azimuth angle, δ is the declination angle, ϕ is the latitude angle, and ω is the hour angle; αs and γs, which determinate the sun position at any time and any day, are calculated using Equations (3) and (4) [24].
The first step consists of implementing four identical PV panels with different DOFs: 2DOF, 1DOF_Elev, 1DOF_Azim, and 0DOF. These panels are, afterwards, linked to current and voltage sensors (INA219) to convert the analog energy readings into digital data, subsequently processed by the ESP32 microcontroller. The latter manages the three sun path trackers, while the servo motors operate via the Arduino IDE platform.
The second step entails preparing a database (local host DB), power_sunpathtarcker_db, framework (MySQL), which records and updates every ten minutes all the energy data (current, voltage, and power) from the four solar panels, along with solar azimuth and elevation coordinates, in real time. The database is connected to the microcontroller by a local host server (XAMPP), as shown in Figure 5.
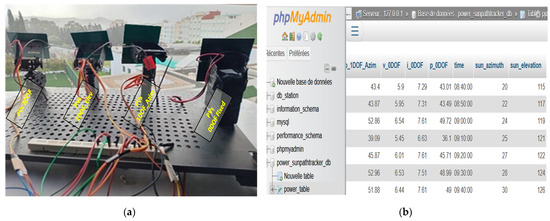
Figure 5.
Some hardware and software tools: (a) Three SPT systems and fixed PVs; (b) Local database power_sunpathtracker_db.
The process of input and output operations (reading and writing) is handled using the ESP32 MCU with its dual-core processor and Wi-Fi connectivity, so both generated and consumed energy data are transmitted to the local database.
At the start of the experiment, resistors are used as loads, powered by four solar panels to quantify electricity consumption at specific time intervals.
Table 2 provides a summary of the energy-related characteristics of the electronic components utilized in the SPT experiment, including key parameters such as voltage, current, and power consumption, which are essential for evaluating the overall energy efficiency and performance of the sun-tracking systems. This table also includes parasitic component energetics, a research area that remains scarcely addressed in the scientific literature.
Table 2.
Energy characteristics of the main electronic components.
4. Assessment of Energy Efficiency of Sun Path Trackers
This section presents the energy efficiency indicators of each SPT, based on measuring both its energy production and consumption. The experimentation for the hardware parts used four INA219 breakout board sensors, so each board must be assigned a unique address as depicted in Table 3.
Table 3.
INA219 Binary Address (combination pins (A0, A1)).
Equation (5) is derived from Figure 6 and Kirchhoff’s voltage law, followed by additional energy-related equations that will be introduced in the subsequent sections.
where UBus refers to the bus voltage corresponding to the potential difference between the sensor’s vin-pin and ground, URs represents the voltage of the shunt resistor, and ULoad denotes the voltage across the photovoltaic panel.
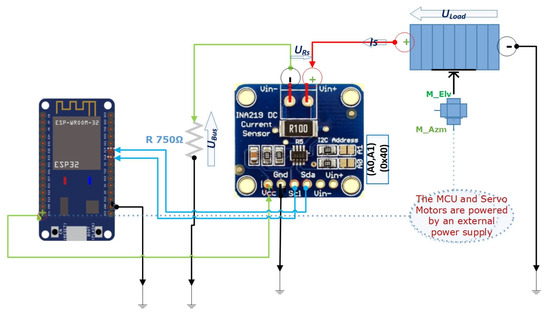
Figure 6.
Detailed electronic diagram of SPT.
These sensors measure voltage, current, and power via protocol I2C with an accuracy of ±1%; I2C is a two-wire serial communication protocol that operates using a serial data line (SDA) and a serial clock line (SCL). This protocol enables multiple devices to share a common communication bus and supports multiple controllers that can send and receive commands and data using the same pins, thereby reducing the number of MCU GPIO pins required. Data is transmitted in byte packets, with each target device assigned a unique address.
A representative sample of the experimental measurements presented for 9 h 50 mn (35,400 s) follows:
- (a)
- Table 4 summarizes the energy production calculation for 9 h 50 mn (S1 → S60) of each SPT system (2DOF, 1DOF_(Elev, Azim)) and fixed panel 0DOF.
Table 4. Energy production of different iDOF systems on 2 March 2025.
- (b)
- Table 5 illustrates the energy consumption calculation for 9 h 50 mn (S1 → S60) of each SPT system (2DOF, 1DOF_(Elev, Azim)) and fixed panel 0DOF.
Table 5. Energy consumption of SPT systems.
4.1. Evaluation of Energy Production of Sun Trackers
The energy production of each iDOF system is evaluated based on the acquired measurements of the voltage and current and using Equation (6).
where represents the total electrical output energy produced by the PV panel of the iDOF system, and are, respectively, the voltage and current produced by each equivalent PV panel during each time step, the time between two successive steps k and k + 1 (∆t = 10 mn), and N is the total number of the time steps over the experiment day.
According to Table 4, it is obvious that the 2DOF system produces more electrical energy than 1DOF_Elev, 1DOF_Azim and fixed ODOF ones.
4.2. Assessment of Energy Consumption of Sun Trackers
This study investigates the energy use of all components of each SPT system, a subject that has received limited attention in the literature. Accordingly, the total electrical energy consumed by the different wired electrical components of each iDOF system () can be estimated using Equation (7) and based on the outcomes of different measurements. This corresponds to the cumulative energy dissipated by all the elements constituting the electronic circuitry of the SPT system which are powered by photovoltaics, with the exception of the servo motors and the microcontroller, which are powered by external supplies. In fact, it corresponds to the sum of energies dissipated across the load resistor (ERL) and the shunt resistor (ERS); however, the latter can be neglected because of its low resistance as denoted in Table 5.
where M denotes the total number of energy-consuming components for the iDOF system. These components are as follows:
- Sensor, most of the energy consumption of which is dissipated in the shunt resistor.
- Microcontroller; the energy consumed by the MCU is calculated as the average of its deep sleep and active modes.
- Servo motor, the energy consumption of which varies based on the operating state—whether stationary, in motion, or blocked.
The power consumption PMCU of the ESP32 MCU is generally lower than that of other components in the SPT system and it can be evaluated using Equations (8)–(10), which take into account the operating time of the device in different functional times (active and sleep modes) [25].
where the average power consumption of ESP32 in sleep mode () is equal to 26.85 μW, while that in active mode () is 78.32 mW.
where ton, and toff denote time in active and sleep modes, respectively, while T represents the clock cycle time.
In the same way, the servo motor is controlled by the PWM (Pulse Width Modulation) of the esp32 with a high pulse Ton of 15 ms, which consumes more energy than in its idle Toff state, for a duration T of 20 ms.
Table 5 provides a summary of the results obtained, related to the energy consumed by each system, along with the energy consumption of their electronic components over the course of the experiment day.
The servo motors used in the experiment are made of metal, consume more energy, and are powered by external energy. They are not included in the efficiency calculations. Table 5 clearly shows that the 2DOF system generates and consumes more energy than the other configurations, as it operates with two servo motors to permanently keep the PV panel facing the sun, while the 0DOF system generates and consumes less energy due to the absence of servo motors.
5. Algorithm Flowchart of Sun Path Tracker Systems
This section presents the algorithm flowchart shown in Figure 7 and details the operational sequence of the SPT systems. The program runs in the form of an infinite loop. The technical details of the hardware and software functions were described in Section 2 and Section 3.
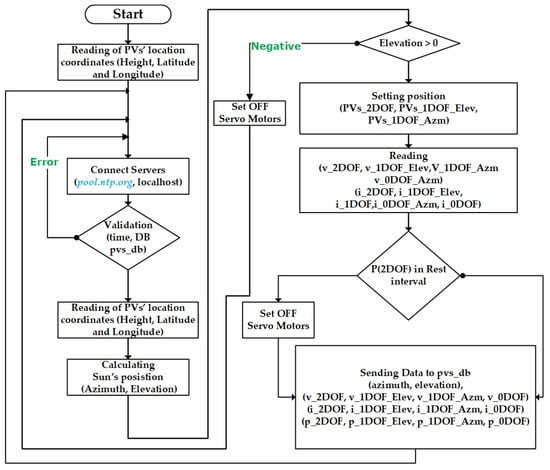
Figure 7.
Algorithm flowchart.
The MCU manages three types of DOFs, while the servo motors are operated through a program developed using the Arduino IDE platform version 2.2.1. A data storage workflow is implemented using the open-source XAMPP server to manage the database.
Voltage, current, and power data from the four solar panels, and the solar azimuth and elevation coordinates are collected and stored in real time, with updates occurring every ten minutes. The XAMPP local server, utilizing a PhP kernel file, acts as an interface between the Arduino IDE platform and the MySQL database (power_sunpathtracker_db). Consequently, the results stored in the local database can be imported and displayed on a website using the Django 4.1 framework.
In this study, a resistor is used as a test load; however, in real applications, it is intended for battery recharging with time efficiency as illustrated in Figure 8.
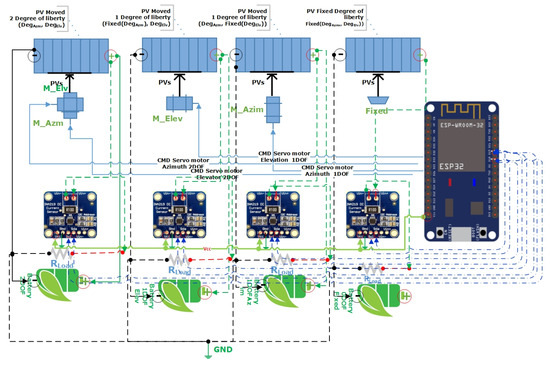
Figure 8.
Detailed electronic diagram of SPT systems.
6. Results and Discussion
This section is devoted to presenting the energy balance of the different types of SPT systems; the data stored in the database is used to calculate the energy efficiency and relative efficiency of each system. These values are subsequently processed in MATLAB to generate energy performance curves, offering a visual representation of each system’s performance throughout the day.
6.1. Energy Efficiency Assessment of SPT Systems
The energy efficiency of SPT systems is evaluated using Equation (11) based on the measurement results. To simplify the measurement of power levels, resistors have been employed as load elements. As a result, the energy produced by the system is consumed primarily by these resistive loads, including both the external resistor (RL = 750 Ω) and the internal shunt resistor (RS = 0.01 Ω) of the INA219 current sensor.
Table 6 shows the energy efficiency results for iDOF systems. It is important to mention that the power consumption of SMs and the ESP32 MCU are excluded, as they are supplied by an external power source. The measurements were recorded every minute over a 10 min period on 28 January 2025.
Table 6.
Energy efficiency results for iDOF systems.
According to Table 6, there is no significant difference in the systems’ efficiencies, as the energy produced by each is consumed by identical loads. Nonetheless, this study primarily emphasizes a comparative analysis of the performance of the three mobile SPT systems in relation to the fixed system. So, the relative performance difference compared to the fixed system is significant as shown in Table 7.
Table 7.
Energy efficiency of SPT during the whole day.
Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13 clearly demonstrate that the two-degree-of-freedom system consistently produces the highest amount of energy, followed by the one-degree-of-freedom system for azimuth and elevation, respectively. The energy output of the 2DOF system is particularly significant during the sunrise and sunset periods, despite showing a relatively high standard deviation, as illustrated in Table 8. At certain moments the rise and fall of the curves of the four solar panels can be categorized by two causes:
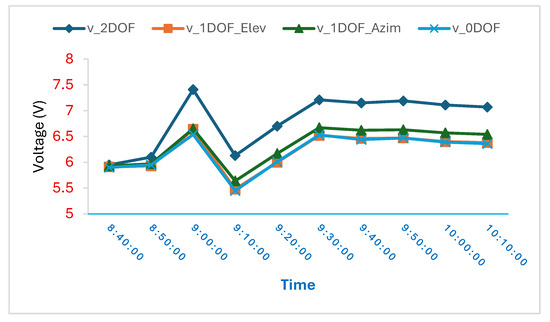
Figure 9.
Voltage evolution of the first third of the experiment day.
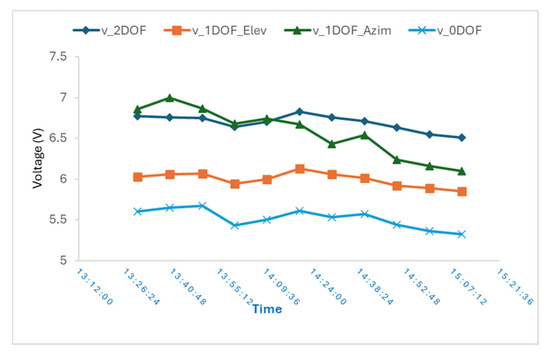
Figure 10.
Voltage evolution of the second third of the experiment day.
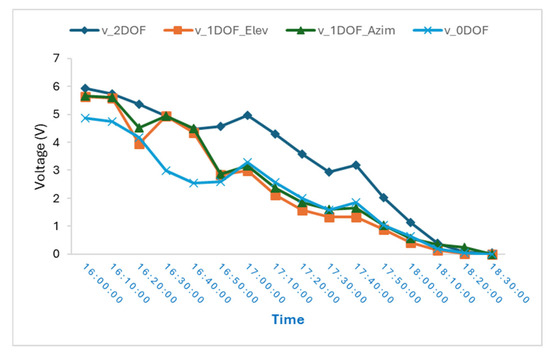
Figure 11.
Voltage evolution of the last third of the experiment day.
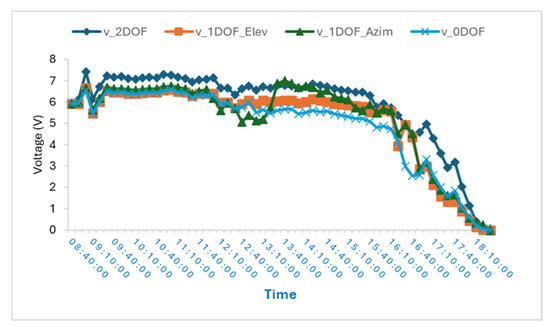
Figure 12.
Evolution of iDOF voltage throughout the whole experiment day.
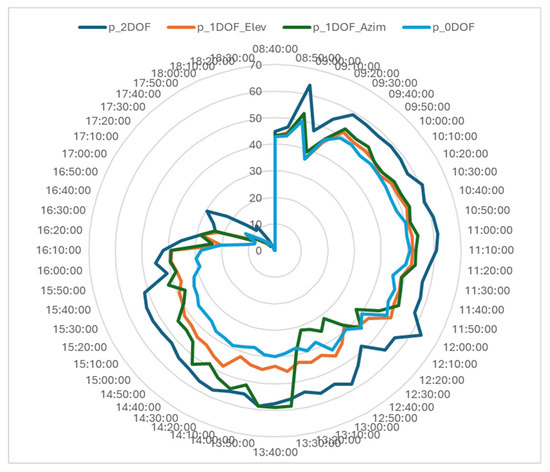
Figure 13.
Power production cycle throughout the experiment day.
Table 8.
Efficiencies of each system in different periods of time.
- Meteorological: receiving variations in sunlight intensity by the PVs, and during periods of cloud cover.
- Technical: reading errors either in the sensors or in the MCU.
In fact, to correct these technical reading errors, a solution will be implemented by using a subroutine program that samples data every millisecond over the ten-minute interval and returns the average value.
6.2. Relative Energy Efficiency
In this subsection, the relative energy efficiency of 2DOF, 1DOF_Elev, and 1DOF_Azim is evaluated in reference to the fixed 0DOF system using Equation (12).
Based on the results indicated in Table 7, the three efficiencies, µ2, µ1_Elev, and µ1_Azim, which correspond, respectively, to the 2DOF, 1DOF_Elev, and 1DOF_Azim systems, exhibit a significant increase of 37.22%, 10.05%, and 12.86% compared to the fixed 0DOF system. This leads to the conclusion that the energy yields follow the order: µ2 > µ1_Azim > µ1_Elev > µ0. These efficiencies are determined over a 10 min time interval, with data recorded every ten minutes. It can be easily observed that, in the middle of the day especially, the two systems, 2DOF and 1DOF_Azim, produce almost the same amount of energy. In fact, the elevation motor of the 2DOF system can be stopped in order to save more of the energy consumed by the motor. To achieve this, we add a subprogram to control SMs in the rest interval, as shown in the figure titled algorithm flowchart, uploaded into the ESP32 MCU, If the two plates produce nearly the same energy while the motor wastes energy, it must be stopped until this difference is reached. The same principle applies if the power consumption of the SM motors affects overall efficiency; in that case, they are set to inactive mode. One of the key concepts of the smart grid is the intelligent management of the energy balance throughout the entire value chain of the electricity grid. This approach allows for the implementation of solutions, such as the rest-interval strategy, within the smart grid system [26,27] and especially in SCADA systems that can integrate a concept for energy forecasting [28].
6.3. Mapping and Behavior Systems During the Day
An examination and discussion of the energy efficiency variations in the four systems over the day is presented in this section. The daytime energy behavior of suggested sun path tracker systems can be categorized into three distinct phases as presented in Table 8:
- (a)
- First, from 8:40 to 10:10.
- (b)
- Second, during midday from 13:30 to 15:10.
- (c)
- Last, until sunset from 16:00 to 18:30.
Table 8 indicates that during the last phase, the 2DOF system demonstrates significantly high efficiency, surpassing 90% in comparison to the fixed system. During the midday hours, all four systems showed solid performance, with the 2DOF system having a slight edge over the others. During the first phase, the 2DOF system remains highly efficient, even if the measurements do not commence precisely at sunrise time.
Based on the values in Table 8, these efficiencies are calculated by using Equation (13), and Equation (14) can determine the standard deviation of each system. In the last phase, the result is negative because the fixed system slightly outperforms the SPT 1DOF_Elev. Therefore, it proves to be more effective than the 1DOF_Elev during this phase.
where µAv signifies the average yield of the three DOF systems.
where Sd represents the standard deviation of the performance of the three DOF systems.
According to Table 9, the standard deviation computed for each third of the day indicates that the last third has a notably higher standard deviation, especially in comparison to the second third.
Table 9.
Standard deviation of each system in different parts of day.
Therefore, Figure 14 provides a summary of the ranking of the different types, based on the performance of each mobile DOF system.
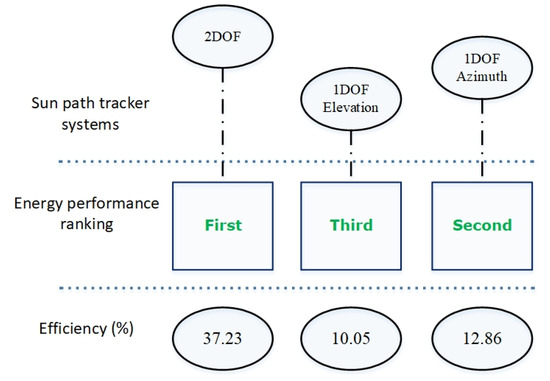
Figure 14.
Efficiency ranking of the three mobile SPTs.
Hence, the methodology and experimental procedure employed in this research showcased the energy performance of these sun-tracking systems using astronomical computations.
6.4. Limitations
The sun path tracker system relies on the date parameters from the www.pool.ntp.org server (accessed on 2 March 2025). In fact, the ESP32 MCU must be continuously connected to this website; otherwise, it will not be possible to take solar panel measurements. While taking measurements from sunrise on 2 March 2025, a connection issue emerged with this server, which resulted in the readings starting at 8:40 a.m., instead of the sunrise intended 6:50 a.m. Therefore, to solve this problem, an ESP32’s RTC (Real-Time Clock) block-like DS3231 RTC module can be implanted.
Moreover, according to the energy balance, the total power consumption of the system, including the servo motors and the ESP32 MCU, exceeds the output of the small (8 V) solar panels. As a result, an external power supply was used to power the four servo motors and the microcontroller. To address this limitation, more powerful solar panels will be used.
For the purpose of applying this stored data in the field of artificial intelligence for control of energy management and improved optimization across all four seasons, this solution needs to be investigated over the course of a full year [29].
7. Conclusions and Future Work
This study aimed to experimentally compare the energy efficiency of sun-path-tracking systems with different configurations. Based on the findings, the deployment of sun path trackers has shown that the 2DOF, 1DOF_Azim, and 1DOF_Elev systems exhibit a significant increase of 37.22%, 12.86%, and 10.05% in relation to the fixed 0DOF system.
From an energy yield perspective of the sun path tracker system, the day can be separated into three main phases: during the first and last phases, the dual-axis tracking system produces a higher output compared to the others, whereas in the second phase, the performance of all systems is more similar, with only minor differences. Overall, this study offers strategies to enhance photovoltaic energy generation and could be implemented in battery-operated devices, like robots, to speed up battery charging, resulting in time savings of more than 30%.
The next project will integrate the four solar panels with the mypowersun website using the Django framework to monitor real-time energy production stored in the local database, rather than connecting the INA219 measurement sensors to the ESP32 MCU via the IoT concept and transferring the database records directly to the website. Furthermore, this detailed energy data can be stored and managed through cloud computing or IoT infrastructure, facilitating remote monitoring and data analysis.
In this future work, the energy measurement period should cover the entire year to accurately analyze these variations and utilize them for annual solar energy assessments.
The inclusion of precise timestamps could allow these digitalization measurements to be leveraged for the supervision of the energy balance between production and consumption using a smart grid.
Finally, storing energy values with their astronomical coordinates throughout the year will give more value to this research, especially if artificial intelligence is to be applied within the smart grid, which will require more data to make appropriate energy decisions.
Author Contributions
Conceptualization, A.H. (Abdellatif Hraich); Methodology, A.H. (Abdellatif Hraich), A.E.F. and O.A.B.; Validation, A.H. (Ali Haddi); Investigation, A.H. (Abdellatif Hraich). All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare that there is no conflict of interest.
Nomenclature
| Abbreviations | |
| ADC | Analog to Digital Converter |
| AI | Artificial Intelligence |
| Azim | Azimuth |
| BMS | Batterie Management System |
| CMD | Command |
| DB | Database |
| DOF | Degree Of Freedom |
| Elev | Elevation |
| fct | function |
| GPIO | General Purpose Input Output |
| MCU | Micro Controller Unit |
| n.a. | Not Available |
| IoT | Internet of Thing |
| PA | Power in Active mode |
| PD | Power in Deep mode |
| PV | Photovoltaic |
| SCADA | Supervisory Control And Data Acquisition |
| SD | Standard Deviation |
| SDA | Serial Data line |
| SCL | Serial Clock Line |
| SG | Smart Grid |
| SM | Servo Motor |
| SPT | Sun Path Tracker |
| Symbols | |
| E | Energy (J) |
| i | 0, 1, 2 in “iDOF” |
| PMCU | Power consumptions MCU |
| R | Resistor |
| S | Step |
| S2 | Two batteries (3.7 V) in series |
| T | Clock cycle time |
| toff | Time of deep mode |
| ton | Time of active mode |
| Greek symbols | |
| αoff | Deep mode |
| αon | Duty cycle active mode |
| αs | Solar altitude angle |
| γs | Solar azimuth angle |
| γ | Surface azimuth angle |
| δ | Declination angle |
| µ | Efficiency. % |
| ϕ | Latitude angle |
| ω | Hour angle |
| Subscripts | |
| A | Active |
| avr | Average |
| c | Consumption |
| D | Deep |
| L | Load |
| P | Production |
| r | Relative |
| S | Shunt |
| tot | Total |
References
- Maia, B.; Ferreira, G.; Hanriot, M. Evaluation of a tracking flat-plate solar collector in Brazil. Appl. Therm. Eng. 2014, 73, 953–962. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. A review of principle and sun-tracking methods for maximizing solar systems output. Renew. Sustain. Energy Rev. 2009, 13, 1800–1818. [Google Scholar] [CrossRef]
- Eke, R.; Senturk, A. Performance comparison of a double-axis sun tracking versus fixed PV system. Sol. Energy 2012, 86, 2665–2672. [Google Scholar] [CrossRef]
- Khalifa, A.; Al-Mutawalli, S. Effect of two-axis sun tracking on the performance of compound parabolic concentrators. Energy Convers. Manag. 1998, 39, 1073–1079. [Google Scholar] [CrossRef]
- Abdallah, S.; Nijmeh, S. Two axes sun tracking system with PLC control. Energy Convers. Manag. 2004, 45, 1931–1939. [Google Scholar] [CrossRef]
- Finster, C. El heliostato de la Universidad Santa Maria. Scientia 1962, 119, 5–20. [Google Scholar]
- Lizbeth, S. A review on sun position sensors used in solar applications. Renew. Sustain. Energy Rev. 2018, 82, 2128–2146. [Google Scholar] [CrossRef]
- Rajesh, S.; Suresh, K.; Anita, G.; Rupendra, P. An imperative role of sun trackers in photovoltaic technology: A review. Renew. Sustain. Energy Rev. 2018, 82, 3263–3278. [Google Scholar] [CrossRef]
- Gubarev, A.; Ganpantsurova, O.; Belikov, K. Thermal hydraulic actuator. J. Mech. Eng. NTUU Kyiv Polytech. Inst. 2013, 115–121. Available online: https://ela.kpi.ua/server/api/core/bitstreams/790a924f-db73-4dc9-8df9-901ba0c52727/content#:~:text=Purpose.%20Justification%20of%20the%20possibility%20of%20using,in%20solar%20power%20systems%2C%20design%20of%20the (accessed on 2 March 2025).
- Brown, J.; Bright, V. Thermal Actuators. In Encyclopedia of Nanotechnology; Bhushan, B., Ed.; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Mikova, L.; Medvecka–Beňova, S.; Kelemen, M.; Trebuna, F.; Virgala, I. Application of shape memory alloy (sma) as actuator. Metalurgija 2015, 54, 169–172. [Google Scholar]
- Abdollahpour, M.; Golzarian, M.; Rohani, A.; Zarchi, H. Development of a machine vision dual-axis solar tracking system. Sol. Energy 2018, 169, 136–143. [Google Scholar] [CrossRef]
- Anshul, A.; Akash, S.; Chandrakant, D.; Shukla, K.; Deepak, P.; Geetam, R. Review on sun tracking technology in solar PV system. Energy Rep. 2020, 6, 392–405. [Google Scholar] [CrossRef]
- Canada, J.; Utrillas, M.; Martinez-Lozano, J.; Pedros, R.; Gomez-Amob, J.; Maj, A. Design of a sun tracker for the automatic measurement of spectral irradiance and construction of an irradiance, database in the 330–1100nm range. Renew. Energy 2007, 32, 2053–2068. [Google Scholar] [CrossRef]
- Blanco-Muriel, M.; Alarcon-Padilla, D.; Lopez-Moratalla, T.; Lara-Coira, M. Computing the solar vector. Sol. Energy 2001, 70, 431–441. [Google Scholar] [CrossRef]
- Alata, M.; Al-Nimr, M.; Qaroush, Y. Developing a multipurpose sun tracking system using fuzzy control. Energy Convers. Manag. 2005, 46, 1229–1245. [Google Scholar] [CrossRef]
- Boukdir, Y.; EL Omari, H. Novel high precision low-cost dual axis sun tracker based on three light sensors. Heliyon 2022, 8, e12412. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhang, J.; Cui, Y.; Bi, X. Design and Implementation of PLC-Based Automatic Sun tracking System for Parabolic Trough Solar Concentrator. MATEC Web Conf. 2016, 77, 06006. [Google Scholar] [CrossRef]
- Sun, J.; Wang, R.; Hong, H.; Liu, Q. An optimized tracking strategy for small-scale double-axis parabolic trough collector. Appl. Therm. Eng. 2017, 112, 1408–1420. [Google Scholar] [CrossRef]
- Ai, B.; Shen, H.; Ban, Q.; Ji, B.; Liao, X. Calculation of the hourly and daily radiation incident on three step tracking planes. Energy Convers. Manag. 2003, 44, 1999–2011. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel high accurate sensorless dual-axis solar tracking system controlled by maximum power point tracking unit of photovoltaic systems. Appl. Energy 2016, 173, 448–459. [Google Scholar] [CrossRef]
- Ghassoul, M. Single axis automatic tracking system based on PILOT scheme to control the solar panel to optimize solar energy extraction. Energy Rep. 2018, 4, 520–527. [Google Scholar] [CrossRef]
- Achkari, O.; El Fadar, A.; Amlal, I.; Haddi, A.; Hamidoun, M.; Hamdoune, S. A new sun-tracking approach for energy saving. Renew. Energy 2021, 169, 820–835. [Google Scholar] [CrossRef]
- Mortadi, M.; El Fadar, A. Cost-effective and environmentally friendly solar collector for thermally driven cooling systems. Appl. Therm. Eng. 2022, 217, 119234. [Google Scholar] [CrossRef]
- Current Consumption Measurement of Modules. Available online: https://docs.espressif.com/projects/esp-idf/en/stable/esp32/api-guides/current-consumption-measurement-modules.html (accessed on 3 January 2025).
- Khadeejah, A.; Abdulsalam, J.; Michael, E.; Olubayo, B. An overview and multicriteria analysis of communication technologies for smart grid applications. e-Prime-Adv. Electr. Eng. Electron. Energy 2023, 3, 100121. [Google Scholar]
- Jha, K.; Shaik, A.G. A comprehensive review of power quality mitigation in the scenario of solar PV integration into utility grid. e-Prime-Adv. Electr. Eng. Electron. Energy 2023, 3, 100103. [Google Scholar] [CrossRef]
- Bousla, M.; Belfkir, M.; Haddi, A.; El Mourabit, Y.; Sadki, A. Comparative Evaluation of Weibull Parameter Estimation Methods for Wind Energy Forecasting: A Case Study of the Tetouan Wind Farm with SCADA-Based Availability Integration. Results Eng. 2025, 27, 106835. [Google Scholar] [CrossRef]
- Takialddin, A.; Handam, A.; Gaeid, K.; Al-Smadi, A.; Al-Husban, Y.; Al-smadi, K. Artificial intelligent control of energy management PV system. Results Control. Optim. 2024, 14, 100343. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).