1. Introduction
With rapid socio-economic development, the demand for electricity in various industries continues to rise [
1]. Although various countries are now actively building new power systems centered on clean energy, thermal power still occupies an important position in them [
2]. Thermal power generates heat energy and converts it into electricity primarily by burning fossil fuels [
3]. Greenhouse gas emissions generated through the process of fossil fuel burning play a role in driving global warming and giving rise to ecological problems [
4]. Therefore, exploring low-carbon emission and cost-effective power scheduling solutions has become the key to achieving sustainable social development [
5].
The goal of economic dispatch (ED) of a power system is to rationally allocate the output of each generating unit to minimize generation costs, reduce carbon emissions, and improve energy efficiency while meeting system operational constraints [
6]. Most traditional economic dispatch problems are solved using centralized methods [
7]: (1) the dispatch center obtains the necessary information on all equipment in the system [
8]; (2) dispatch centers analyze information from across the system [
9]; (3) the dispatch center sends optimized information in the form of power generation commands to each device in the system [
10]. The main existing centralized optimization methods are: linear programming [
11], mixed-integer linear programming [
12], quadratic programming method [
13], and particle swarm optimization [
14]. However, as the size of the grid grows, centralized optimization exposes many shortcomings [
15]. For example: (1) centralized optimization requires real-time access to state data from each power plant and each load point and relies on highly reliable communication networks [
16]; (2) centralized systems rely on a centralized control unit, and a failure of the central unit can bring down the entire dispatch system [
17]; (3) centralized optimization makes it difficult to respond quickly to sudden changes or local failures that occur in the system [
18].
Nowadays, most of the research focuses on distributed optimization at home and abroad [
19]. Distributed optimization exhibits higher robustness and scalability compared to centralized optimization [
20]. Distributed optimization provides greater information confidentiality than centralized optimization. In a distributed framework, each subsystem maintains the confidentiality of proprietary data such as operational state and topology information without compromising data privacy and decision independence [
21]. In addition, distributed optimization has the following advantages: (1) in distributed economic dispatch (DED), communication costs are low because decision making and resource allocation are performed locally, eliminating the need for frequent centralized communication [
22]; (2) distributed system architecture is more flexible and scalable, and the system can be scaled by adding or removing nodes, reducing the difficulty of implementation and maintenance [
23]. The solution steps of distributed optimization are: firstly, distributed optimization decomposes the whole model into local models of participating intelligence; then, the boundary information is exchanged between neighboring intelligence, and each intelligence gets its own optimal solution through the distributed optimization method; ultimately, the set of optimal solutions of all intelligence constitutes the global optimal solution of the whole economic dispatch [
24]. The main existing distributed optimization methods are: alternating direction multiplier method [
25], target cascade approach [
26], and optimal condition decomposition method [
27].
Most of the early studies on the ED of power systems considered only a single objective, i.e., minimization of generation costs [
28]. As power systems continue to evolve and under the growing pressure of global environmental conservation efforts, economic dispatch (ED) in power systems must take into account not only the reduction of generation costs to the minimum but also the environmental repercussions caused by CO
2 emissions [
29]. However, optimizing costs and CO
2 emissions simultaneously is a conflicting issue. Reducing the cost of electricity generation usually requires the use of conventional fossil fuels for electricity generation, but the use of large quantities of extracted fossil fuels leads to large carbon emissions; optimizing carbon emissions requires the consideration of cleaner sources of energy for electricity generation, but the cost of cleaner sources of energy for electricity generation is high and uncertain [
30]. Therefore, the study of multi-gradient economic dispatch (MGED) modeling that simultaneously satisfies low generation costs and low carbon emissions is of great interest [
31]. In practice, MGED requires comprehensive consideration of the trade-off relationship between the two objectives, and other constraints need to be taken into account to balance the dual objectives of economic and environmental protection.
Distributed multi-gradient optimization methods can have the advantages of both distributed scheduling and multi-gradient dispatching. Existing distributed multi-gradient optimization methods mainly include: distributed multi-objective gray wolf optimizer (DMOGWO) [
32], distributed multi-objective moth–flame algorithm (DMOMFO) [
33], distributed multi-objective atomic orbital search algorithm (DMOAOS) [
34]. Nevertheless, amid the swift advancement of intelligent algorithms and the ever-expanding scale of power systems, the existing MGED optimization approach, characterized by its sluggish calculation speed and subpar optimization performance, is no longer competent to fulfill the computational demands of large-scale multi-region power systems. For instance, when addressing the 118-system case, DMOGWO and DMOMFO exhibit several critical drawbacks. Firstly, their high computational cost stems from the need to evaluate multiple objectives iteratively while maintaining population diversity, which becomes computationally prohibitive as problem scale increases. Secondly, both algorithms demonstrate significant carbon footprint concerns due to excessive energy consumption during prolonged optimization runs, particularly when deployed on large-scale power systems requiring real-time decision making. Consequently, it becomes imperative to put forward a novel optimization algorithm to align with the computational demands of contemporary power systems.
To surmount the drawbacks of the currently available ED optimization approaches, this study combines the multi-region distributed optimization model and multi-gradient whale optimization algorithm (MGWOA) [
35] and proposes a multi-region distributed multi-gradient whale optimization algorithm (MRDMGWOA). Multi-area distributed optimization methods can simplify the complexity of system computation and have faster solution speed and better convergence than centralized optimization methods in addressing power systems of high complexity; the MGWOA is highly adaptive and can adjust the search strategy according to the changes in the environment and objectives, and it is better than GWO [
36], PSO [
37], MFO [
38], and GOA [
39] in solving multi-gradient optimization problems. The standard deviation of MGWOA in solving real engineering problems such as disc brake, four-bar truss, and reducer is lower than PSO, MFO, GWO and GOA, which indicates that the MGWOA has the advantages of high accuracy and good performance. In addition, the bubble net attack mechanism of MOWOA generates diversified search paths in the decision space to avoid local Pareto front stagnation caused by premature particle swarm aggregation in MOPSO. MGWOA can obtain a stable system with low overshooting and oscillation frequencies under the microgrid model, and the computation speed of MGWOA is faster than that of PSO, MFO, GWO, and GOA. Therefore, MGWOA is characterized by excellent performance and global search capability. MRDMGWOA can overcome the deficiencies of DMOGWO and DMOMFO, such as slow computation speed and poor optimization effect, thus meeting the requirements of real-time dispatching in power systems. The existing ED optimization methods are shown in
Table 1.
The principal contributions made by this study are as follows:
- (1)
Considering the existing centralized approaches with the defects of slow calculation speed and low privacy, this study establishes a multi-region distributed optimization model to handle the distributed dispatch problem. The multi-region distributed optimization model can reduce the communication burden of the power system and effectively protect the security of the equipment.
- (2)
Considering that there is a lack of pertinent literature offering an in-depth investigation into the multi-region distributed optimization framework, the concept of multi-region distributed optimization is combined with MGWOA, leading to the proposal of MRDMGWOA to address this framework. MRDMGWOA can compensate for the limitations of centralized optimization in dealing with complex constraints and regional autonomy.
- (3)
Multi-region distributed optimization can only solve the problem of distributed optimization, and MGWOA can only solve the problem of multi-gradient optimization, which is not strongly correlated. In contrast, the MRDMGWOA has the advantages of both MGED and multi-regional distributed optimization and can solve both problems simultaneously.
- (4)
The proposal of MRDMGWOA fills the gap of the multi-region distributed optimization framework.
The rest of the study is organized as follows.
Section 2 builds a multi-region distributed ED model.
Section 3 describes the principle of MRDMGWOA.
Section 4 conducts simulation experiments on the IEEE 39 system and 118 system.
Section 5 gives an overview of all the work in the text.
3. Multi-Region Distributed Multi-Gradient Whale Optimization Algorithm
This section first introduces the principles of the MGWOA, followed by the application of MGWOA to a multi-region distributed scheduling system.
3.1. Whale Optimization Algorithm
Inspired by the feeding behavior of whales in nature [
40], especially the unique feeding strategy of humpback whales, the whale optimization algorithm (WOA) solves complex optimization problems by simulating their natural behavior [
41]. WOA comprises the key stages outlined as follows:
The formula for initializing the location of the whale stock in the WOA is as follows:
where
is the position of the
ith whale;
and
are the lower and upper bounds of the whale search space;
is between [0, 1].
- (2)
Siege phase
This phase simulates the behavior of a whale encircling its prey, where the whale adjusts its position according to the current position of the optimal solution and gradually moves closer to its prey. The manifestation of this behavior is captured by the subsequent equations:
where
t indicates the current number of iterations;
and
are the coefficients;
is the location of the current solution set;
is the location of the current optimal solution;
a decreases from 2 to 0 during the iteration.
- (3)
Bubble net attack methodology (development phase)
To simulate the behavior of humpback whales swimming around their prey in a contracted circle while following a spiral path, a stochastic selection mechanism was devised so that the whales had a 50% probability of choosing either the contracted surround or spiral model to update their position during the optimization process. The mathematical model is as follows:
where
b is a constant defining the shape of the logarithmic spiral;
l is in [−1, 1];
denotes the best solution obtained by the algorithm so far;
p is between [0, 1].
- (4)
Finding prey (search phase)
In addition to the bubble net method of predation, humpback whales randomly seek out prey by changing the value of
AX. When
, the whale will move away from the target prey. In contrast to the bubble net feeding phase, here the position of one whale will be randomly selected as a reference to update the next position, instead of the so far optimal individual position. The math formula for the search phase is as follows:
where
denotes the location of a random whale.
The optimization mechanism of WOA consists of three core aspects: firstly, a dynamic parameter adjustment strategy is adopted to achieve a balanced regulation of global exploration and local development by a linearly decrease from the initial value of 2 to 0; secondly, a dual decision-making mechanism is introduced in the position-updating process, which adopts a randomized individual guidance strategy when and switches to the current optimal solution guidance mode when . In addition, the traversal capability of the solution space is effectively expanded by intelligently switching the two motion modes of spiral envelopment and spinning search through the probability threshold parameter p. The algorithmic process starts from initializing a random candidate solution set, and after several rounds of iterative optimization, the optimal solution is output when a preset convergence condition is reached. This composite mechanism, incorporating parameter tuning, multi-mode search, and intelligent decision making, significantly improves the adaptability of the algorithm in different problems.
3.2. Multi-Gradient Whale Optimization Algorithm
MGWOA is improved and optimized based on WOA [
42]. The main optimization mechanisms introduced by MGWOA are the non-dominated ordering mechanism and the congestion distance screening mechanism. The introduction of these two mechanisms enables WOA to efficiently select Pareto-optimal solutions to smoothly solve multi-gradient problems, while ensuring diversity of Pareto frontiers and algorithmic exploration. The following is a detailed description of the two mechanisms.
- (1)
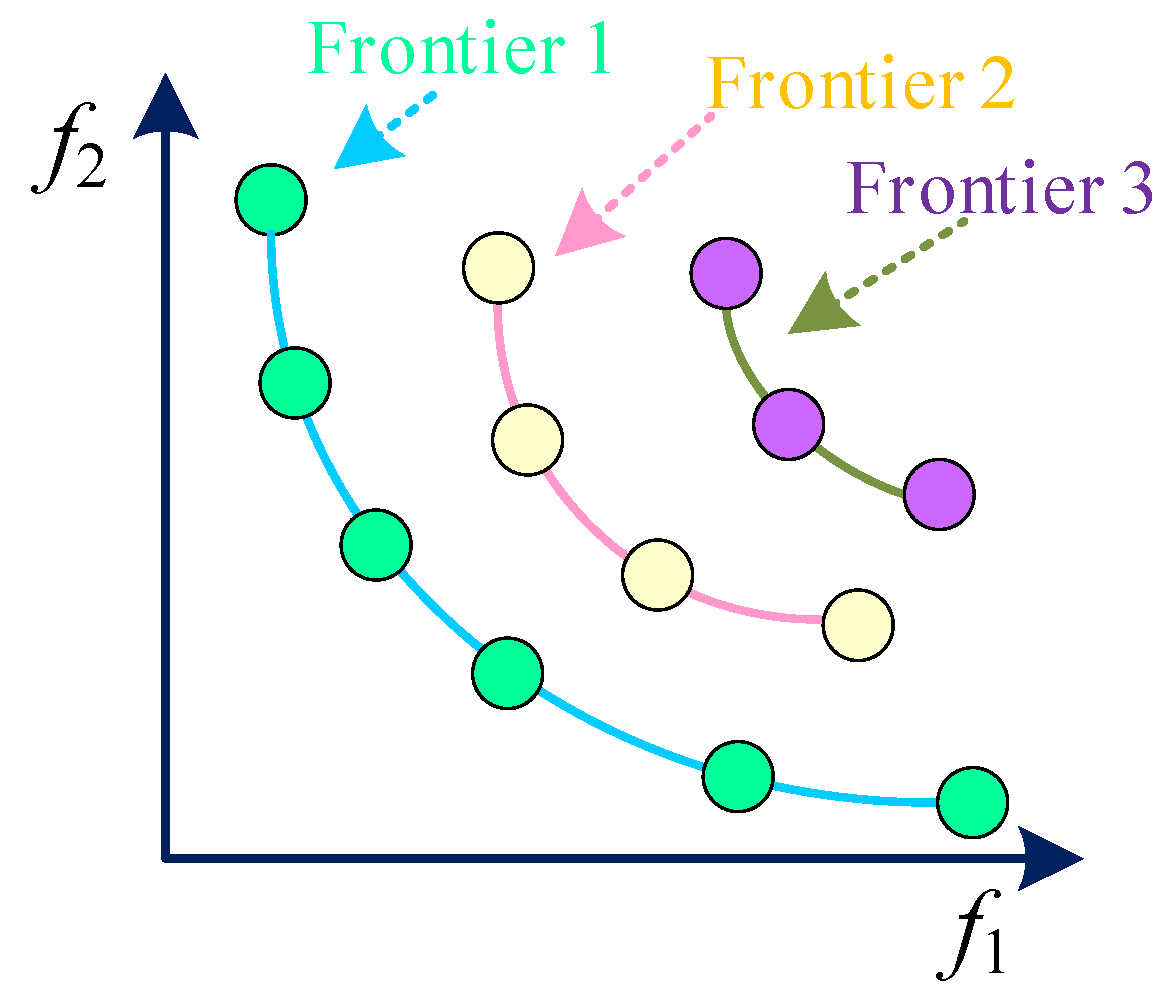
Non-dominated sorting mechanisms
The non-dominated sorting mechanism evaluates the fitness values of the initial populations generated or the solutions generated after the WOA search. The non-dominated sorting mechanism operates as follows: first, the fitness values of the population are traversed, and the set of individuals that are not dominated by any individual is taken as the first frontier and its non-dominated rank is set to 1. Then, among the remaining sets, the set of individuals that are not dominated by any individual continues to be identified and is taken as the second frontier, and its non-dominated rank is set to 2. Subsequently, the remaining sets are traversed again and the above process is repeated, with the sets that are not dominated by any individual as the third frontier, the fourth frontier, etc., in order, and the corresponding non-domination levels are set. This process will continue until all individuals are assigned to different non-dominated ranks. The principle of non-dominated ranking is shown in
Figure 5.
- (2)
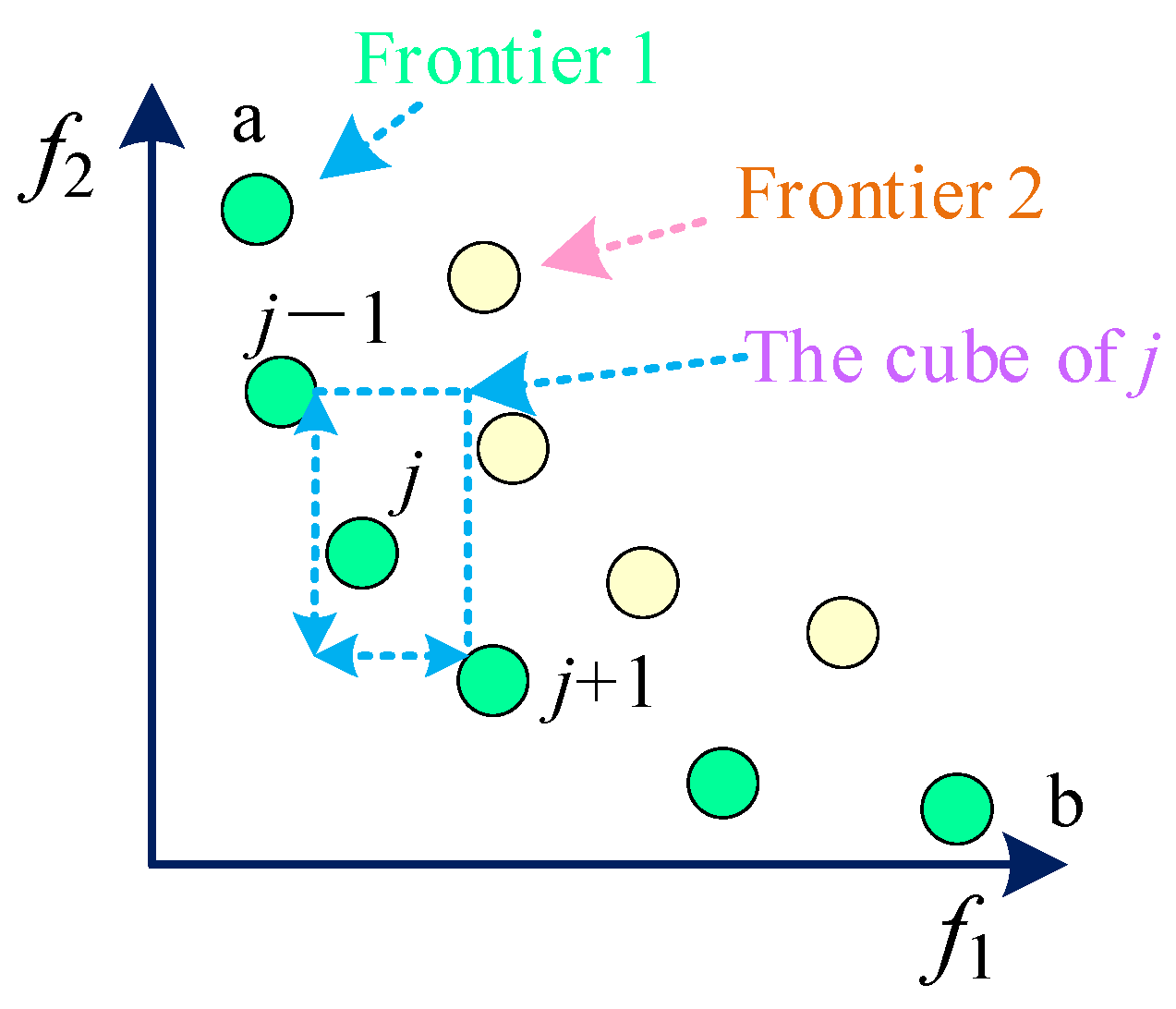
Congestion distance screening mechanism
In the iterative process of MGWOA, an increasing number of individuals will gradually result in greater spatial crowding within the archive. Consequently, to preserve population diversity, it is necessary to eliminate individuals with the minimal crowding distances and introduce new ones into the archive, thereby achieving a more optimal Pareto solution set (shown in
Figure 6). The approach for calculating congestion distance is presented in Equation (14).
where
and
denote the maximum and minimum values of the
jth objective function, respectively.
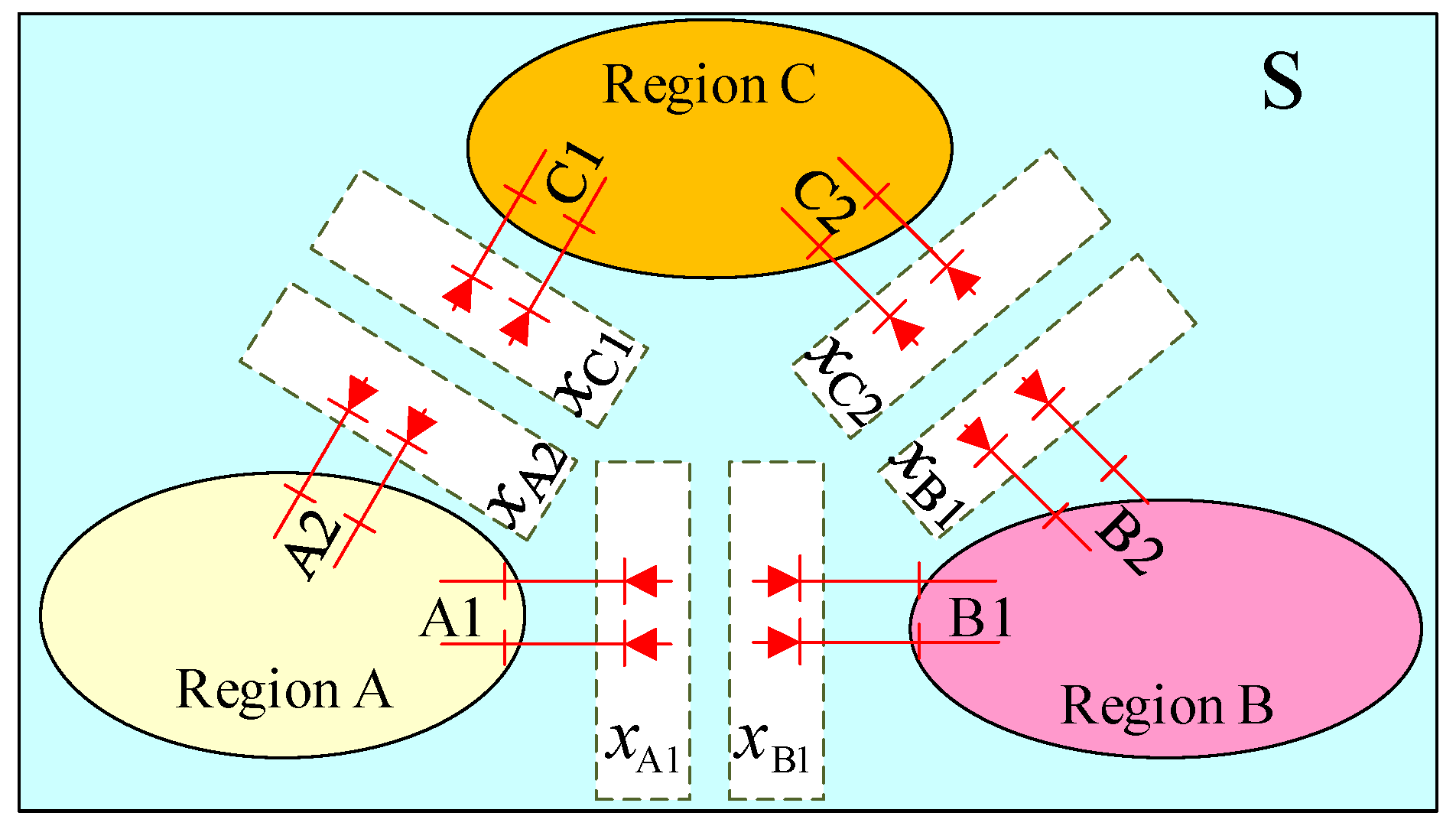
3.3. Introduction of a Multi-Regional Distributed Model
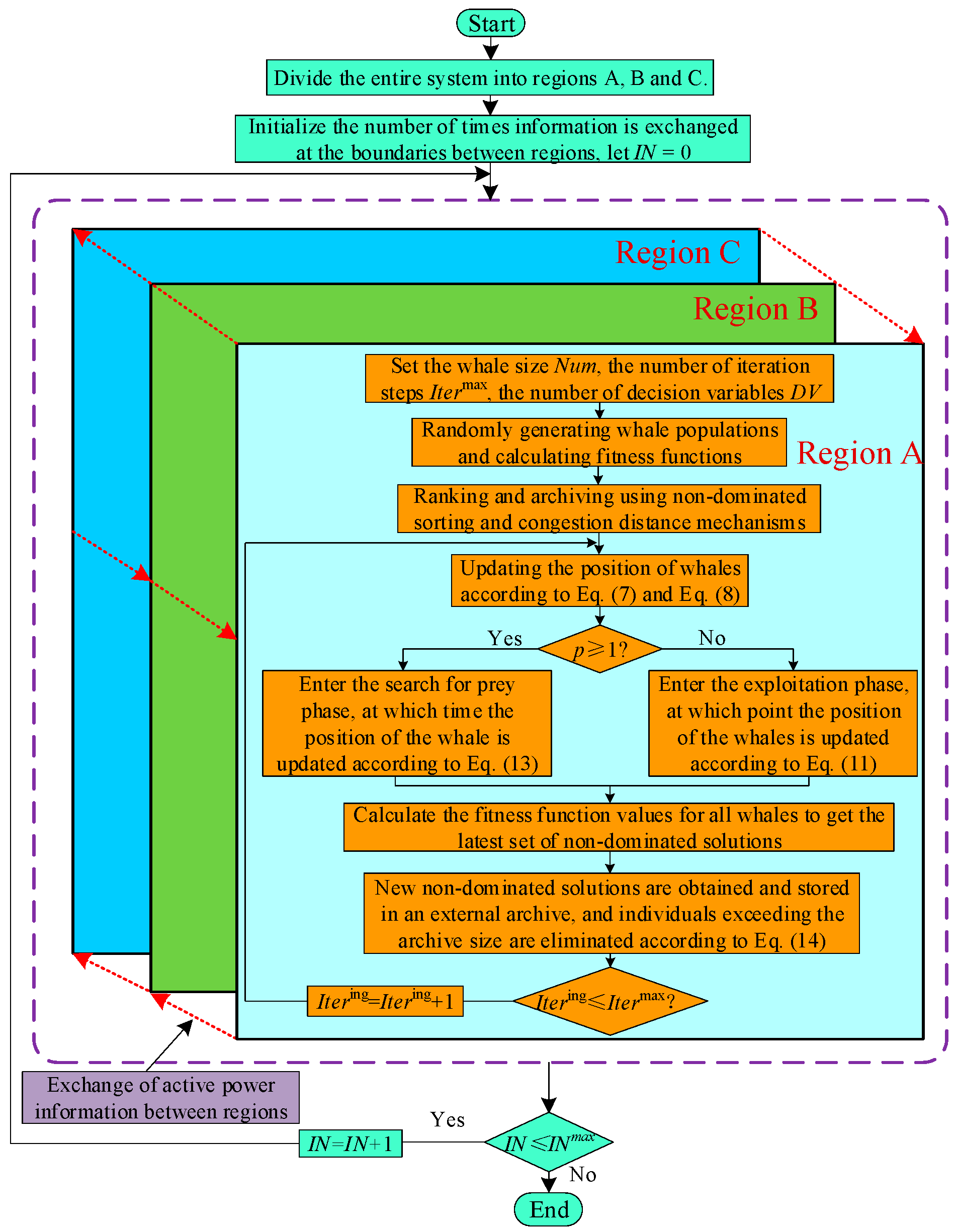
In this study, a multi-region distributed model is introduced in the multi-gradient whale optimization algorithm and MRDMGWOA is proposed. The multi-region distributed optimization approach enables the partitioning of the entire system into multiple subregions, with each subregion undergoing optimization as a cohesive unit through the exchange of merely a portion of the information pertaining to the boundary nodes of the region. The information exchanged between the regions is the active output of the boundary node that acts as a virtual generator after the bus is torn. The computational flow of MRDMGWOA is shown in
Figure 7:
Step 1: Start; enter system and generator parameters.
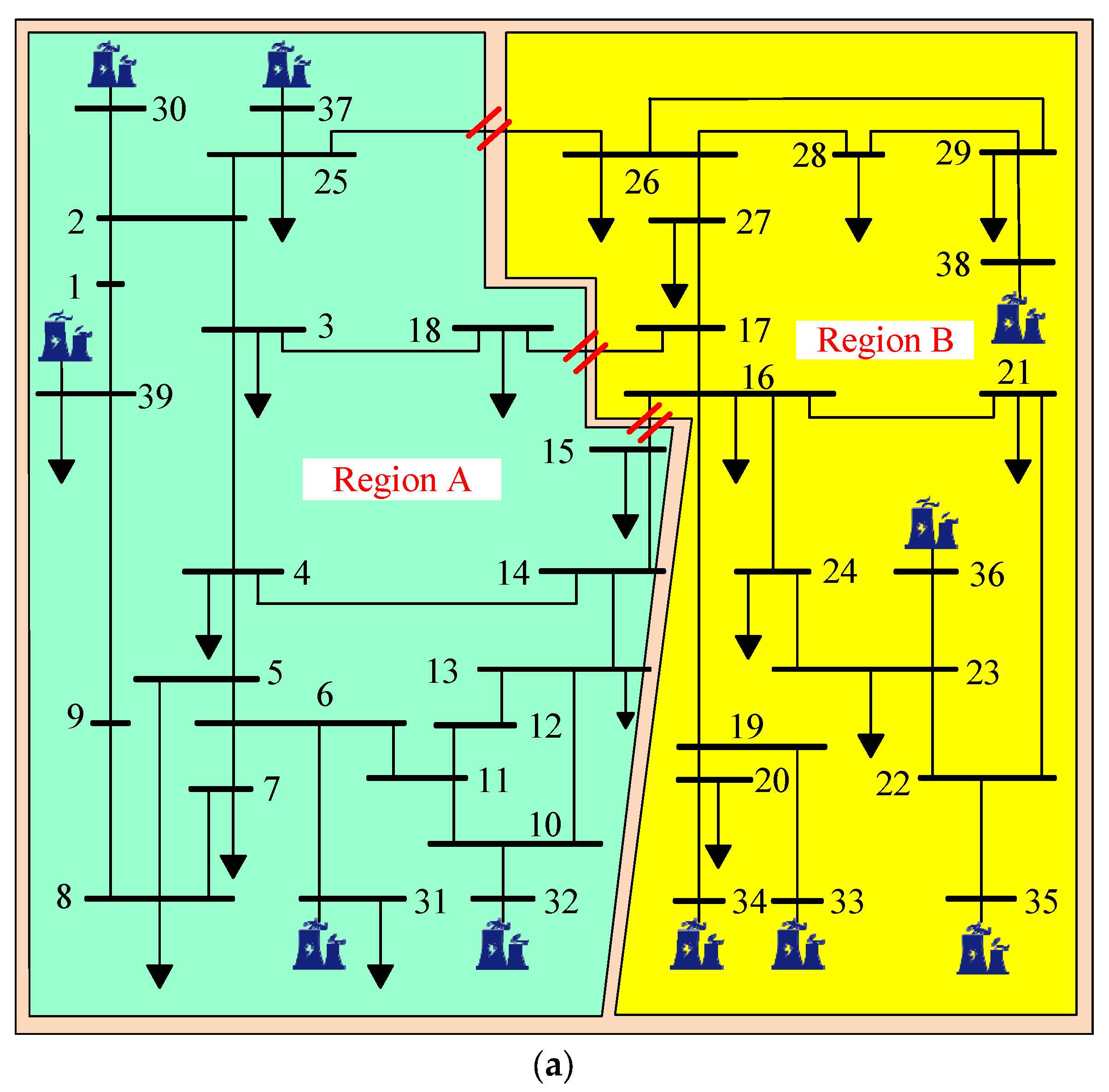
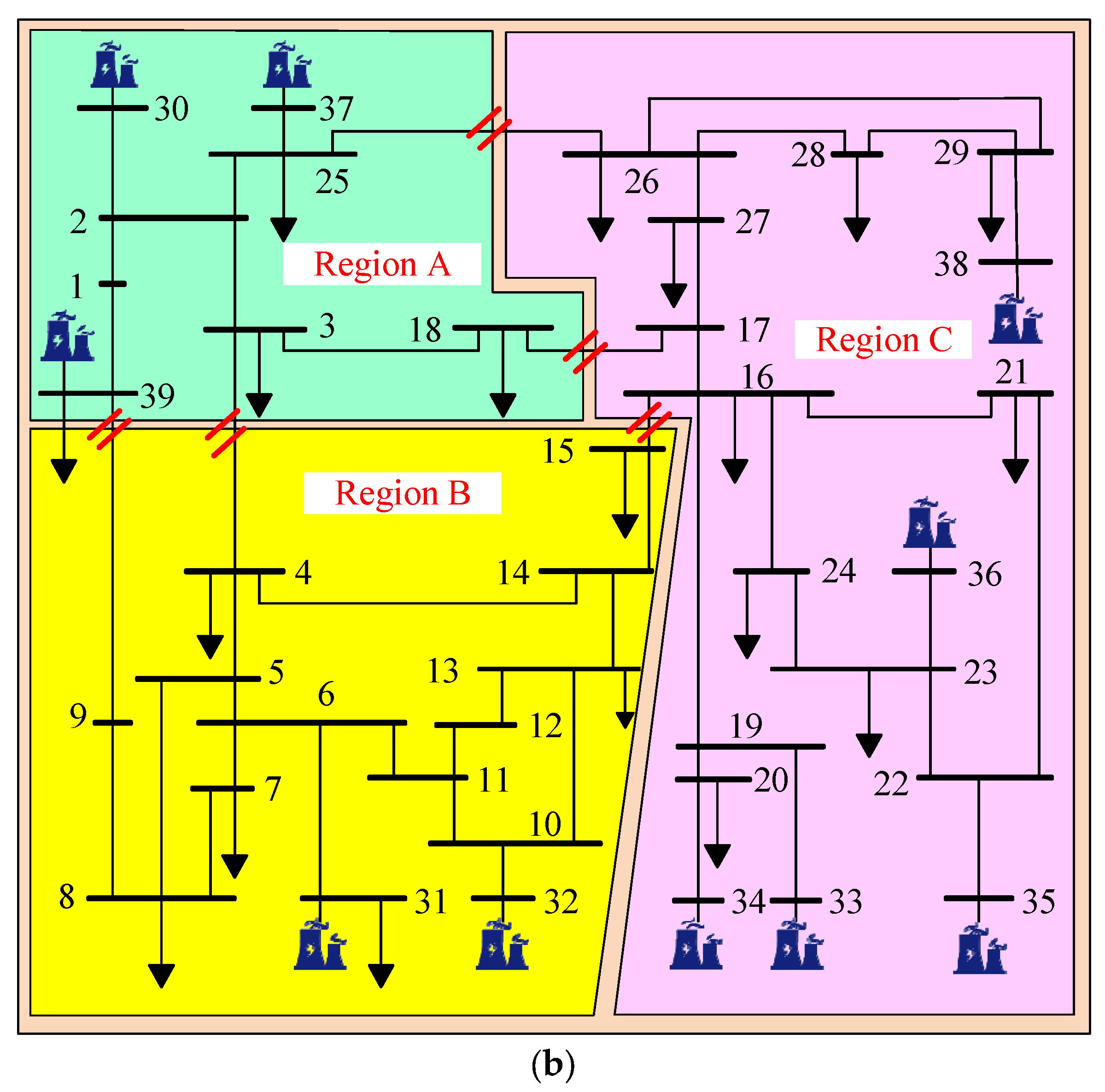
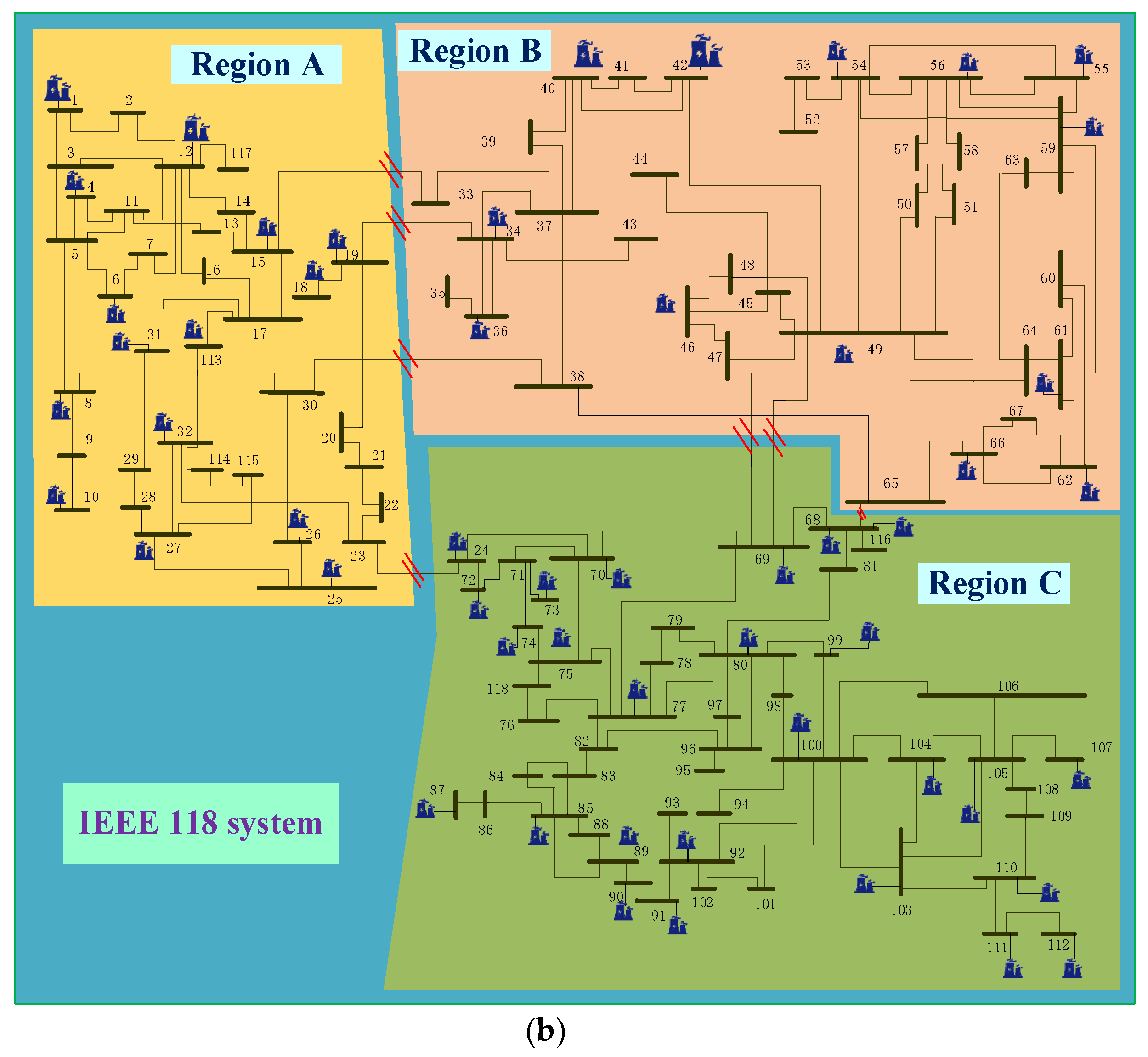
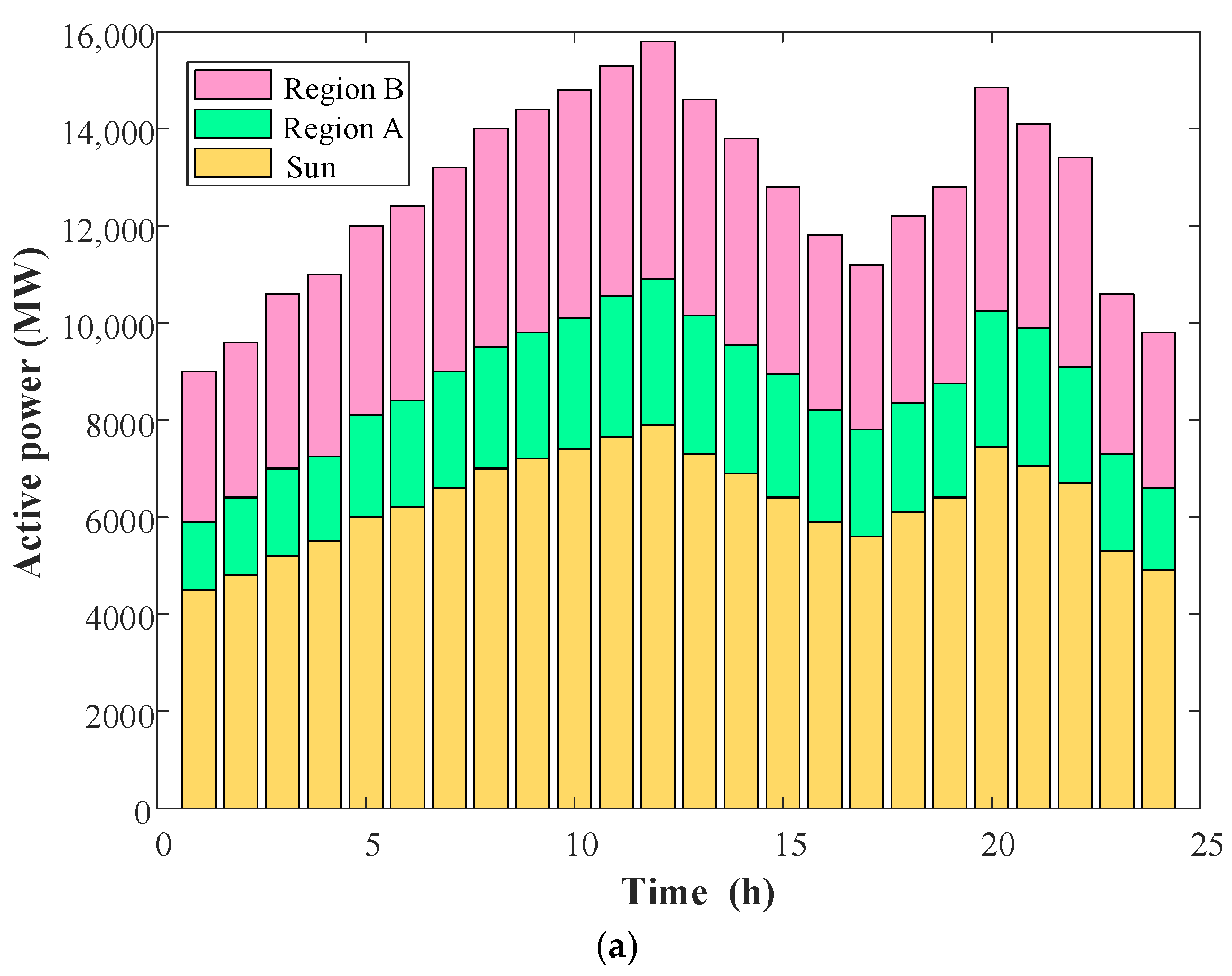
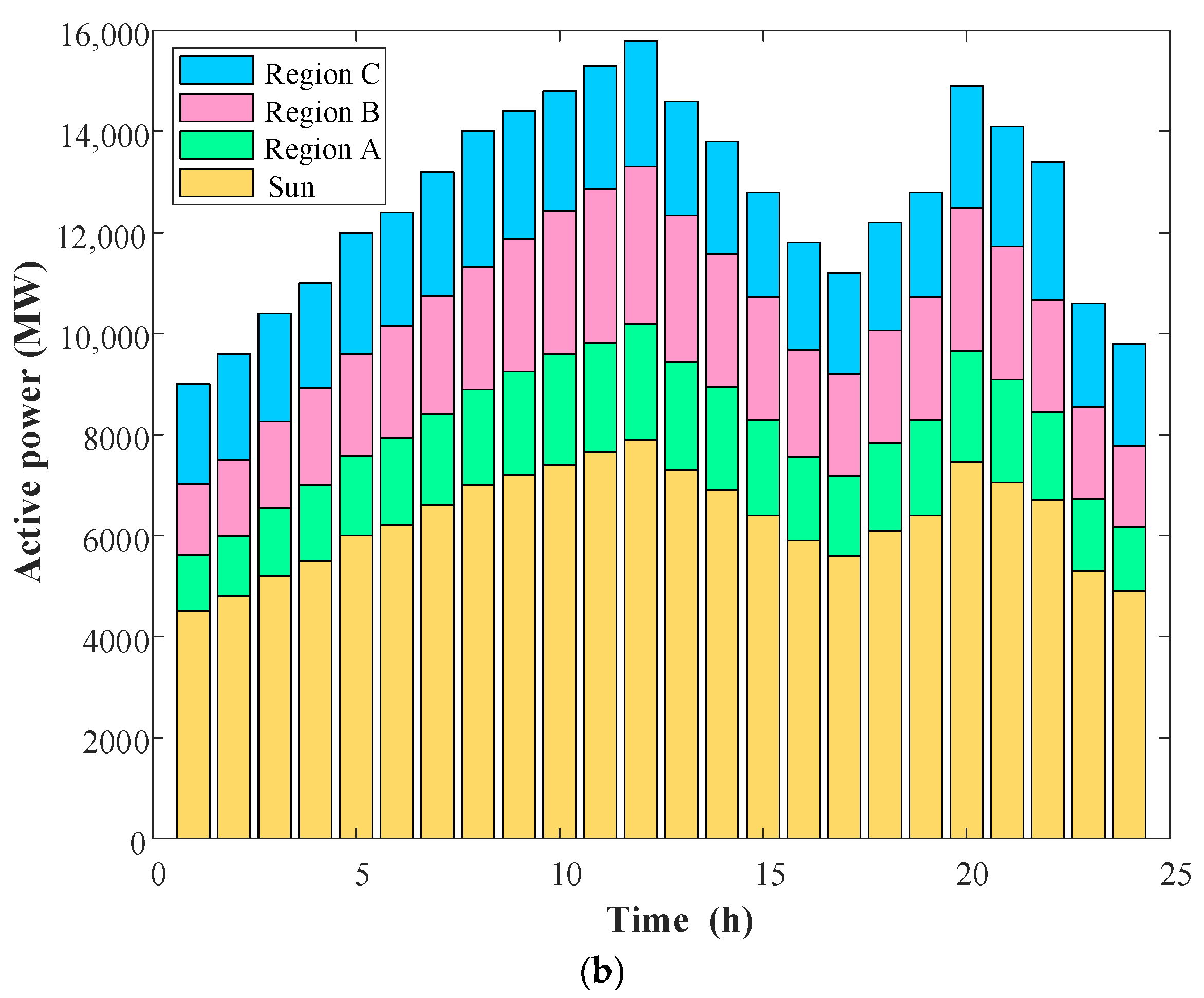
Step 2: Divide the system into three subregions A, B, C.
Step 3: Set the count of times the boundary exchanges data, letting .
Step 4: Regions A, B, and C are optimized in parallel (i.e., Step 4, Step 5, and Step 6 are optimized simultaneously).
Step 4.1: Set the number of whales in region A , the maximum number of iterations , and the number of decision variables .
Step 4.2: Under the constraints, the whale population was randomly generated and the fitness function of the whale population was calculated.
Step 4.3: Hierarchical classification of whale populations using the non-dominated sorting mechanism and the congestion distance mechanism and archiving of populations.
Step 4.4: The position of the whale is updated according to Equations (6) and (7).
Step 4.5: Determine whether ; if p < 0.5, the whale enters the exploitation phase and uses the bubble net method to attack the prey, at which time the position of the whale is updated according to Equation (10); if , the whale enters the prey search phase, at which time the position of the whale is updated according to Equation (11).
Step 4.6: The fitness function values were calculated for all whales after updating their positions.
Step 4.7: The updated whale population was deposited in an external archive, and then the population in the external archive was ranked using the non-dominated sorting mechanism and the crowding distance mechanism, and individuals exceeding the archive size were eliminated according to Equation (12).
Step 4.8: Determine . If it is not greater than, make and return to Step 4.4; if the condition is satisfied, exchange the boundary information with the other two regions.
Step 5: Optimization of region B.
Step 5.1–Step 5.8 are the same as Step 4.1–Step 4.8.
Step 6: Optimization of region C.
Step 6.1–Step 6.8 are the same as Step 4.1–Step 4.8.
Step 7: Determine if is satisfied. If it is satisfied, go to Step 8; if it is not satisfied, make , and go back to Step 4.
Step 8: Output optimization outcome.
Thus, the MRDMGWOA has the following properties:
- (1)
The MRDMGWOA is the first of its kind to combine a multi-area distributed optimization framework with heuristic intelligence algorithms as a cross-fertilization between the fields of power system optimization and computational intelligence algorithms. The multi-region distributed optimization paradigm facilitates the segmentation of the power system into several subregions, thereby mitigating the challenges associated with solving large-scale power system problems; MGWOA can achieve a balance between economy and environmental protection through iterative optimization.
- (2)
The ED is characterized by high dimensionality, non-linearity, non-convexity, and multiple constraints, while the MRDMGWOA proposed in this study can effectively handle these complex features and can meet the real-time scheduling requirements through the powerful optimization-seeking capability of MGWOA.
- (3)
In ED of power systems, each region is not an isolated unit. If MGWOA is directly applied independently in each region, with each region only optimizing its own economic efficiency and carbon emissions, it may lead to conflicts in solutions between regions. MRDMGWOA addresses this issue by designing a multi-regional Pareto frontier fusion mechanism: at the regional level, MGWOA in each region generates a local frontier; at the system level, the algorithm constructs a global Pareto frontier through non-dominated sorting. MRDMGWOA ensures that the final solution not only satisfies the constraints of each region but also achieves the optimal trade-off between global economic efficiency and global carbon emissions, which cannot be achieved by independently applying MGWOA without the fusion and global optimization of cross-regional solutions.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}