
Modeling and Characteristic Analysis of Mistuned Series–Series-Compensated Wireless Charging System for EVs


Abstract
1. Introduction
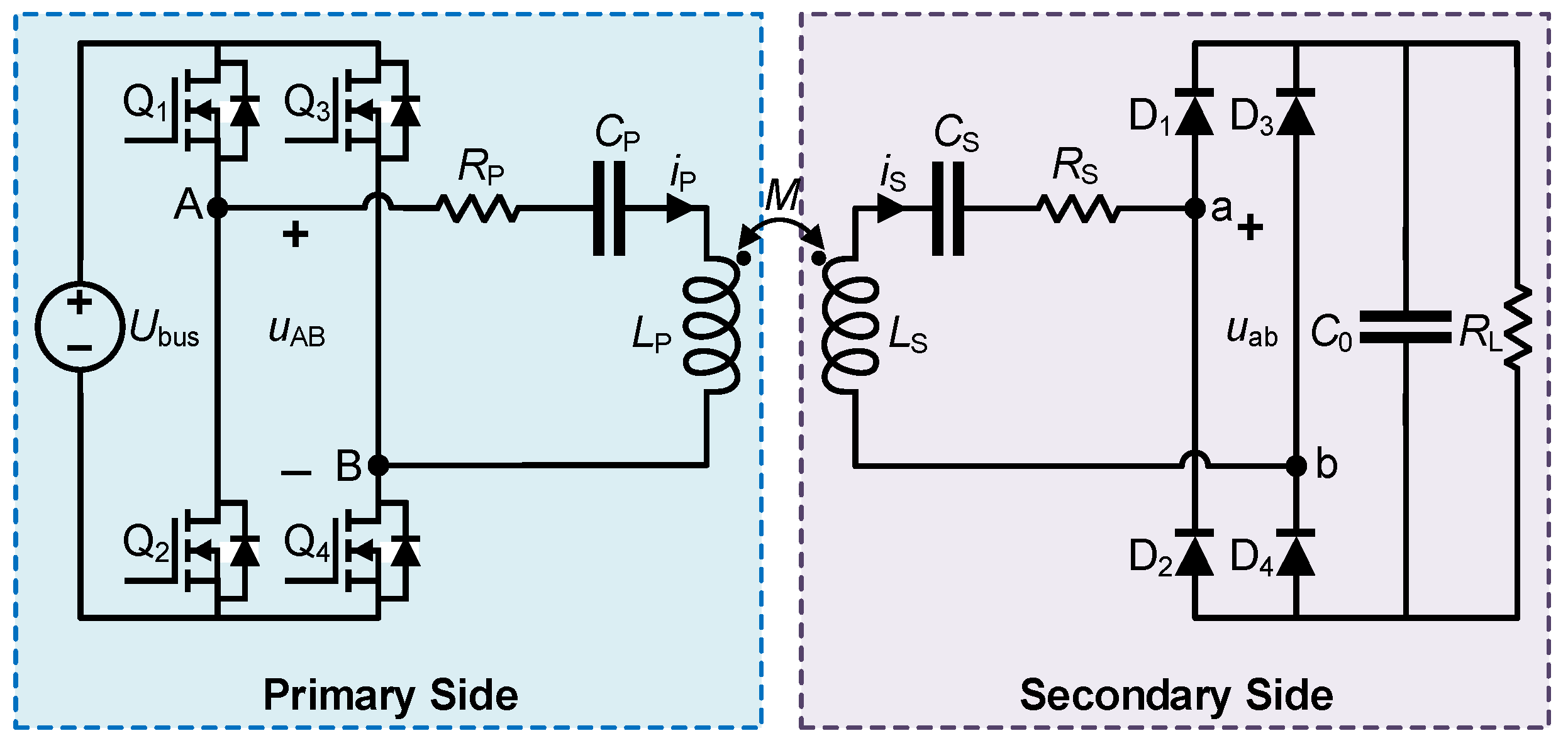
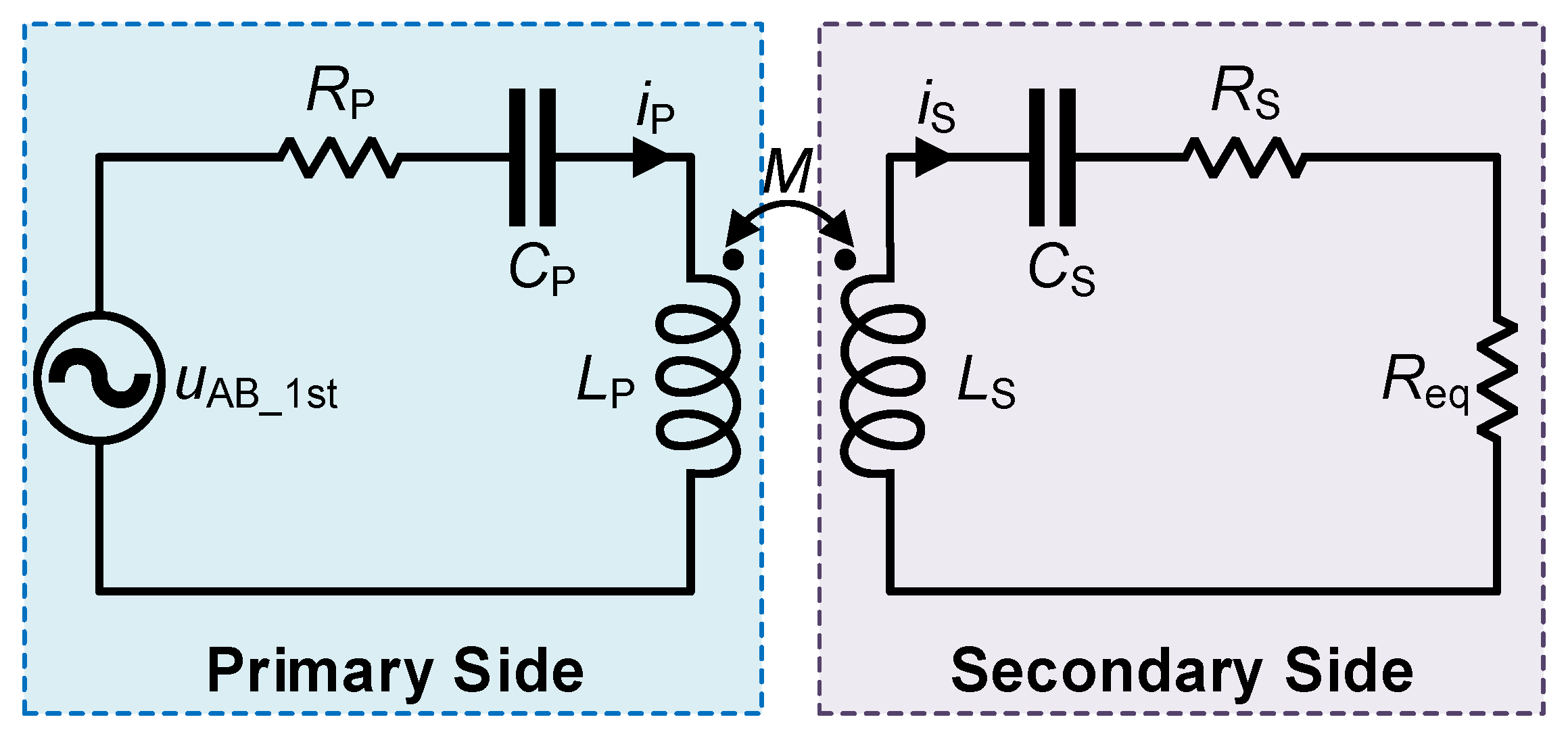
2. Modeling of SS-Compensated Wireless Charging System
3. Modeling and Analysis of Mistuned SS-Compensated Wireless Charging Systems
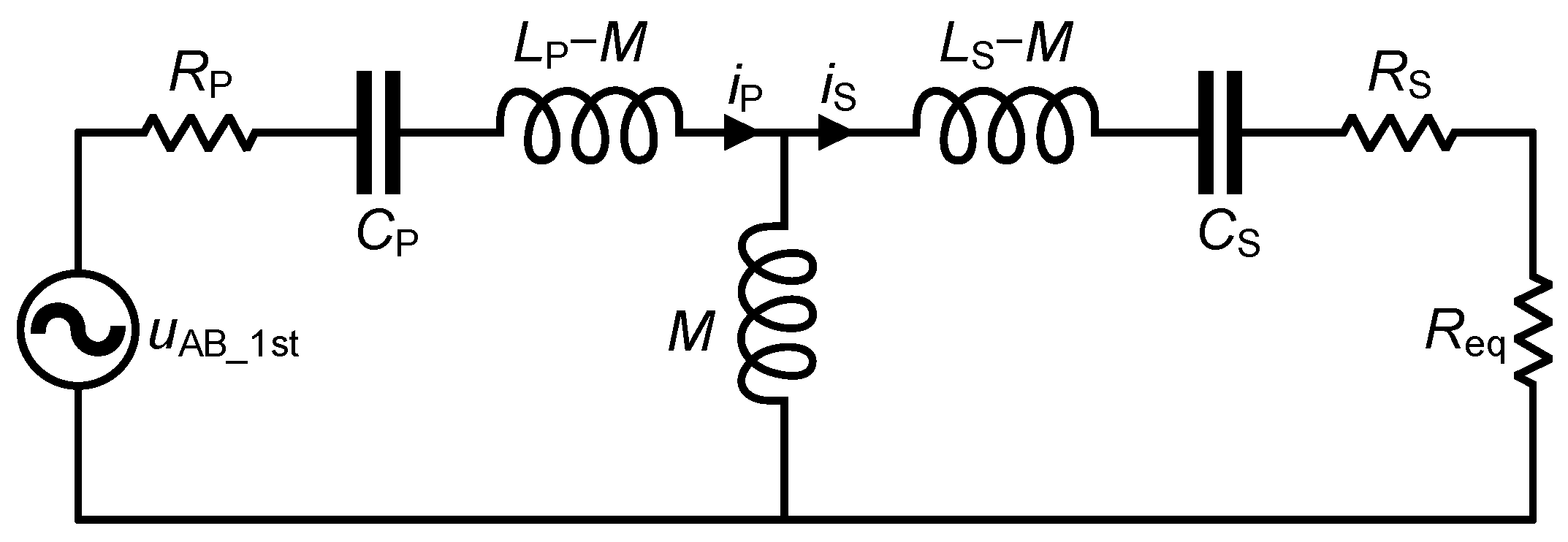
3.1. Equivalent Transformation of Mistuned System Parameters
3.2. Analysis of Input Impedance of Mistuned SS-Compensated Wireless Charging Systems
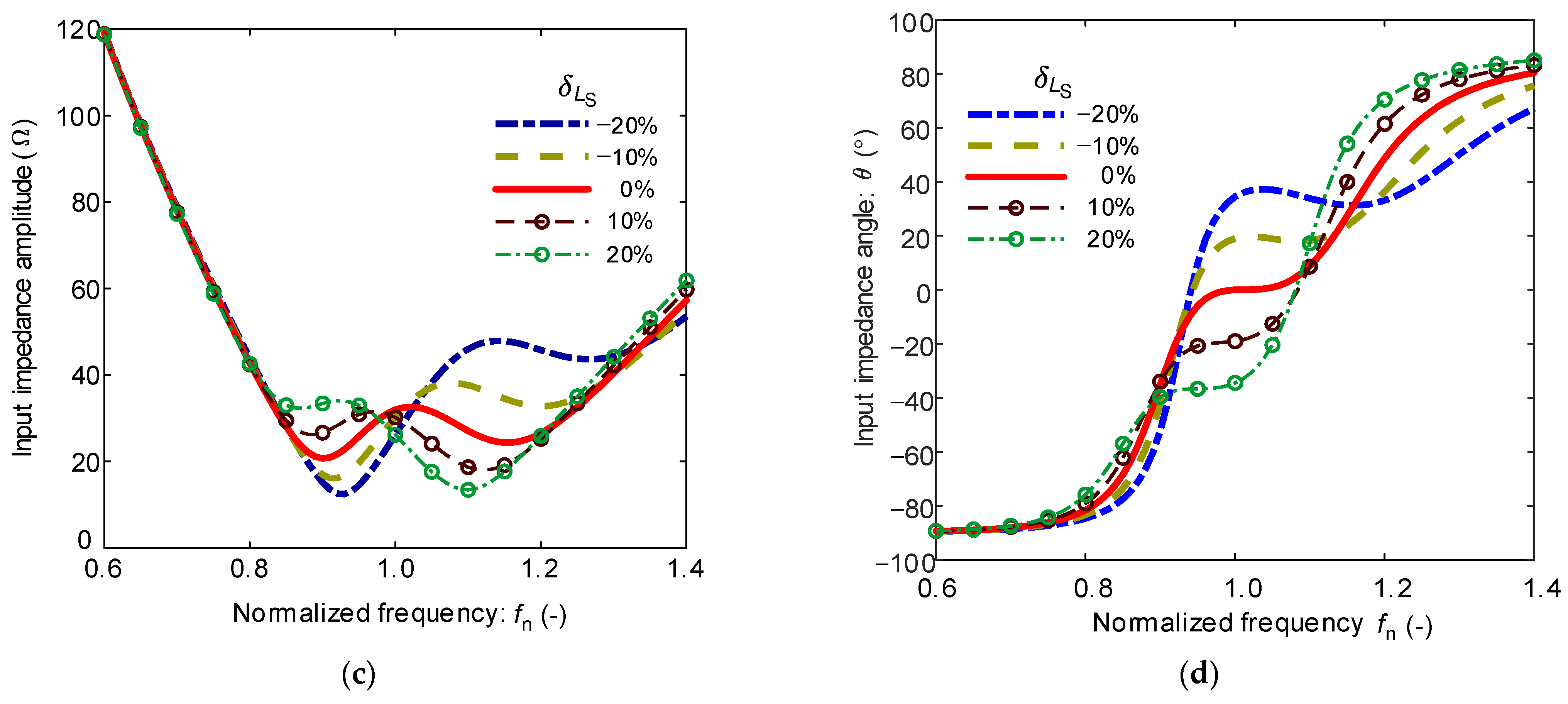
3.2.1. Input Impedance Characterization
3.2.2. Condition of Neglecting the Equivalent Series Resistance
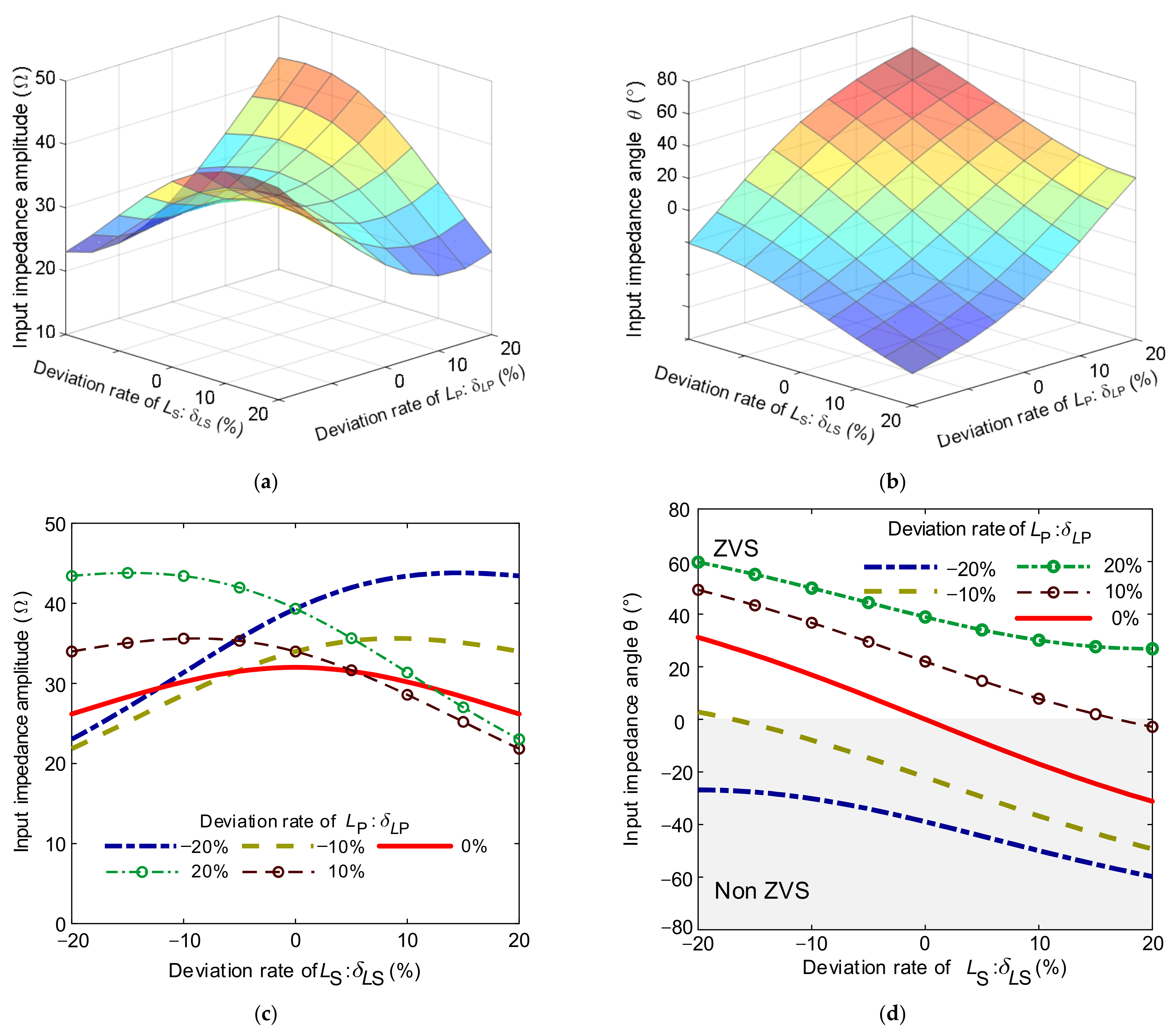
3.2.3. Input Impedance Characteristics Analysis Under Neglected Equivalent Series Resistance
- A four-parameter coupling term involving the loaded quality factor, the deviation ratio of the transmitter coil self-inductance, the deviation ratio of the receiver coil self-inductance, and the coupling coefficient;
- A three-parameter coupling term involving the loaded quality factor, the deviation ratio of the transmitter coil self-inductance, and the coupling coefficient;
- A two-parameter coupling involving the loaded quality factor and the deviation ratio of the receiver coil self-inductance.
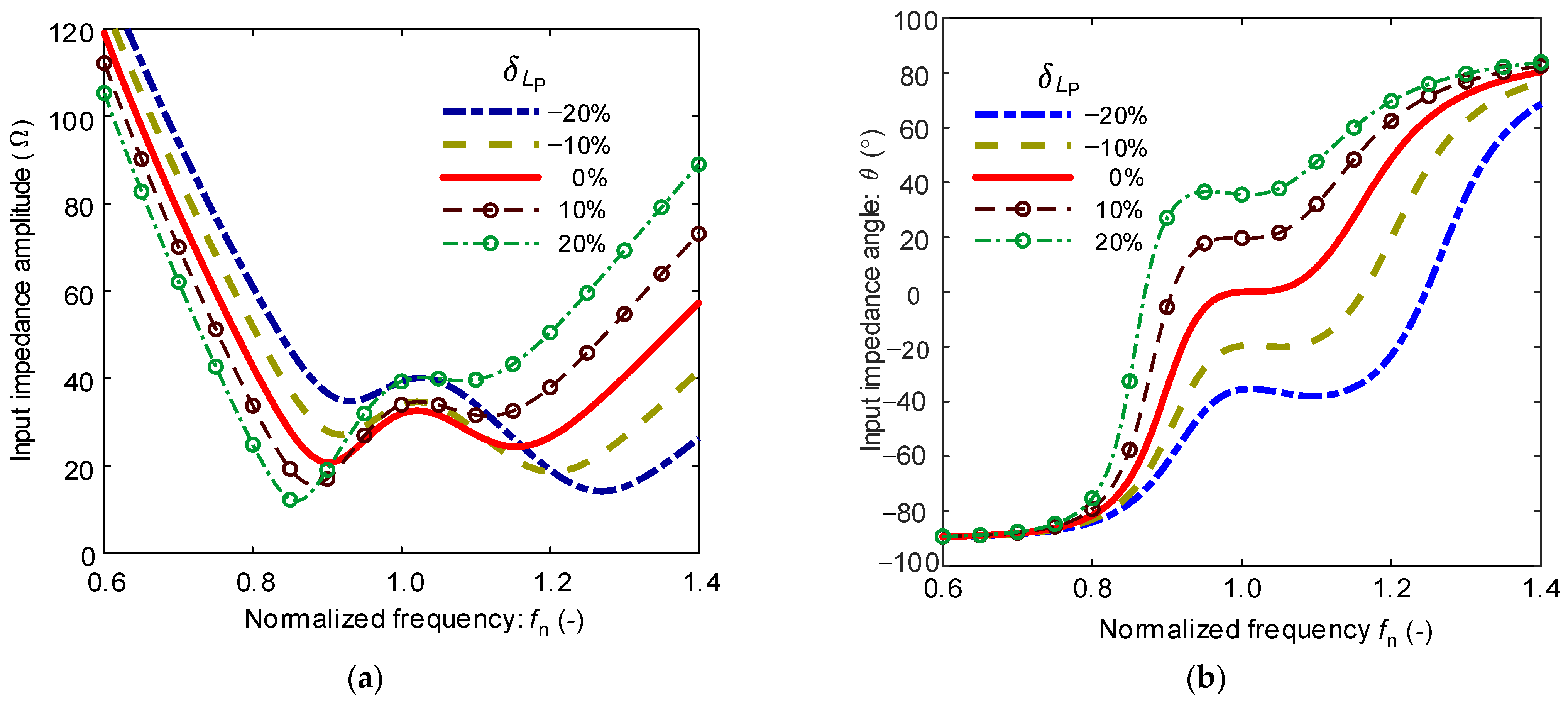
- Decreasing the receiver-side self-inductance or its compensation capacitance will result in a positive input impedance angle, causing the entire SS-compensated wireless charging system to exhibit inductive characteristics.
- Increasing the transmitter-side self-inductance or its compensation capacitance will also result in a positive input impedance angle, making the SS-compensated system behave inductively.
3.3. Efficiency of Mistuned SS-Compensated Wireless Charging System
3.4. Output Power of Mistuned SS-Compensated Wireless Charging System
- The first term is a constant term 1;
- The second and third terms are the coupling terms between the self-inductance deviation ratios of the transmitter and receiver coils (, ) and the coupling coefficient ();
- The fourth term is a coupling term involving the self-inductance deviation ratio of the transmitter coil (), the coupling coefficient (), and the loaded quality factor ().
4. Simulation Analysis
4.1. Simulation Analysis of Impedance Characteristics of Mistuned SS-Compensated Wireless Charging System
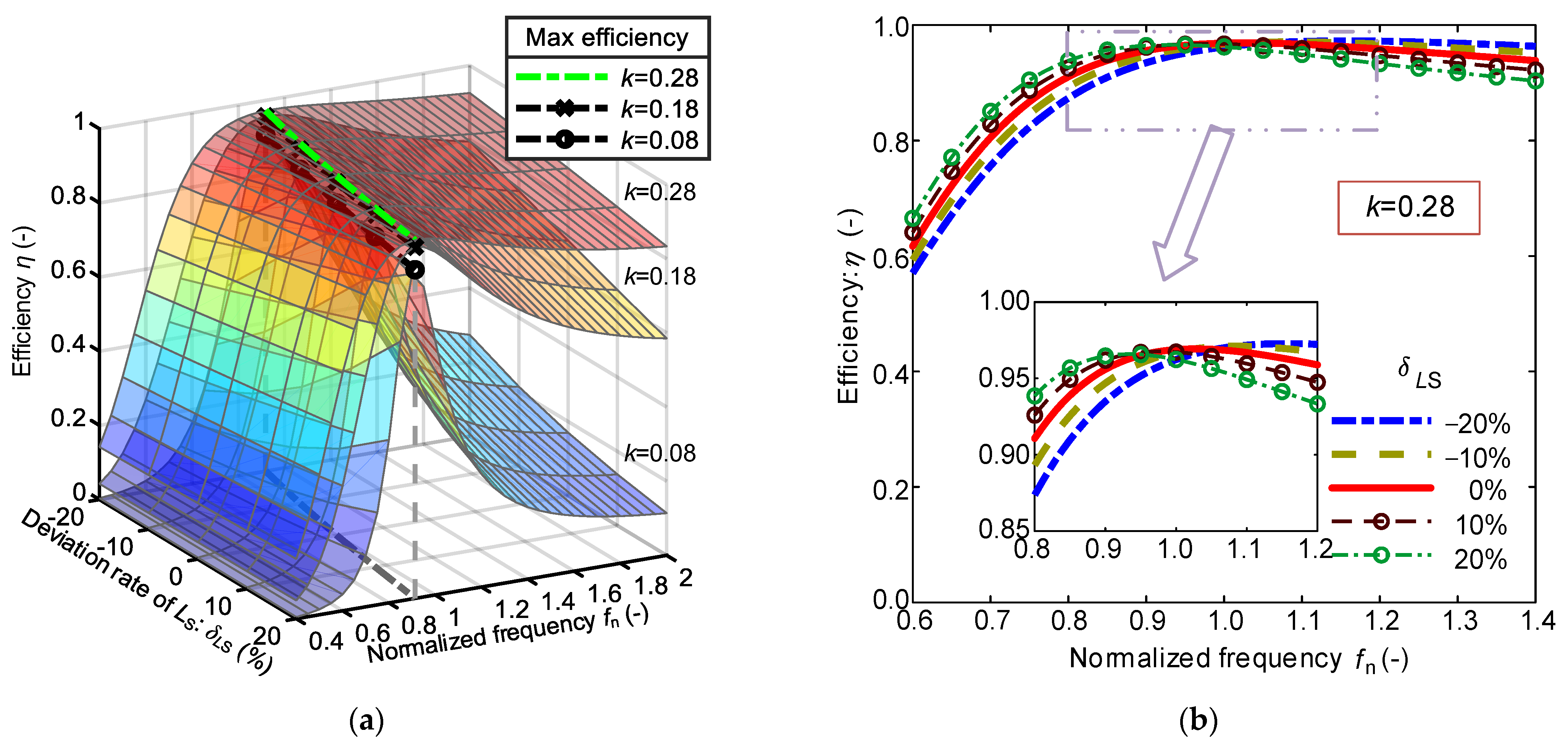
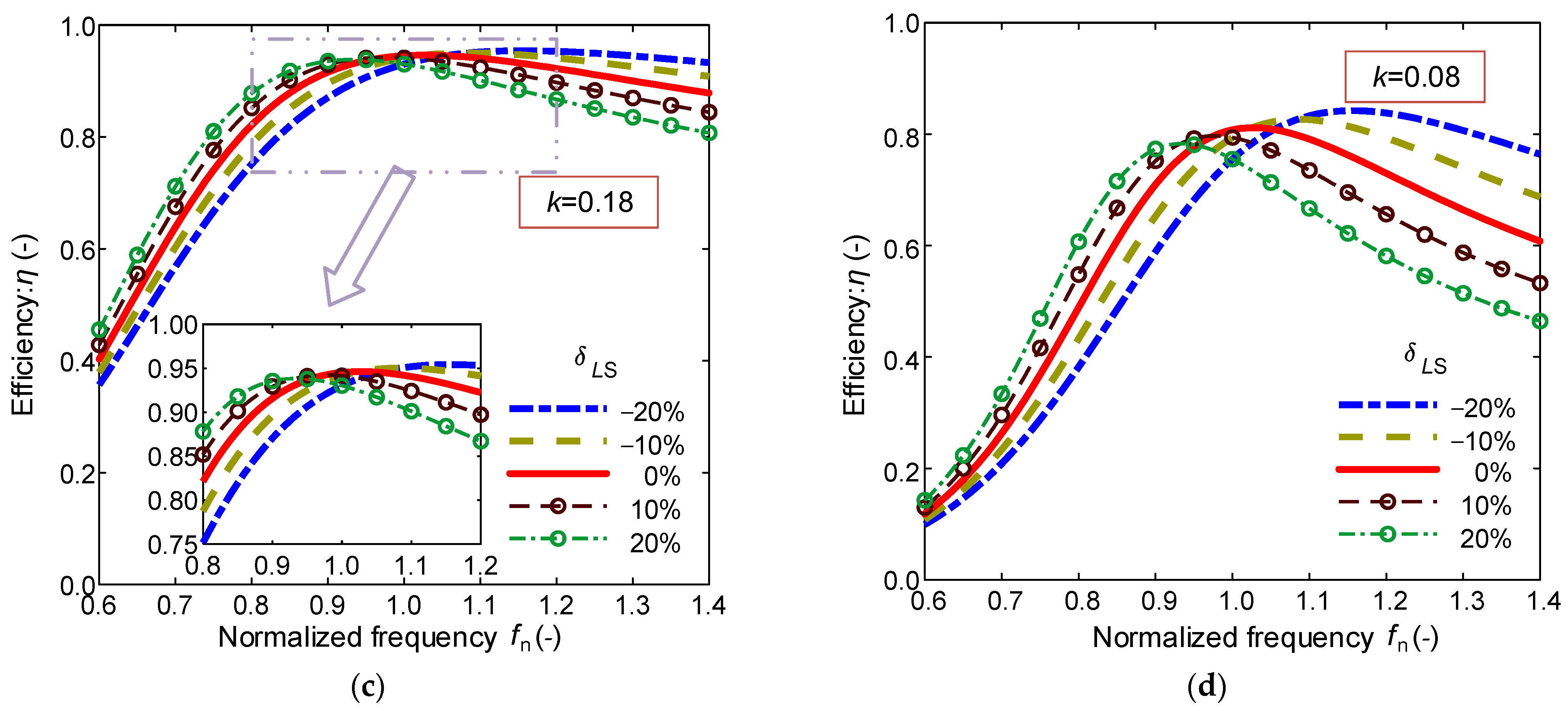
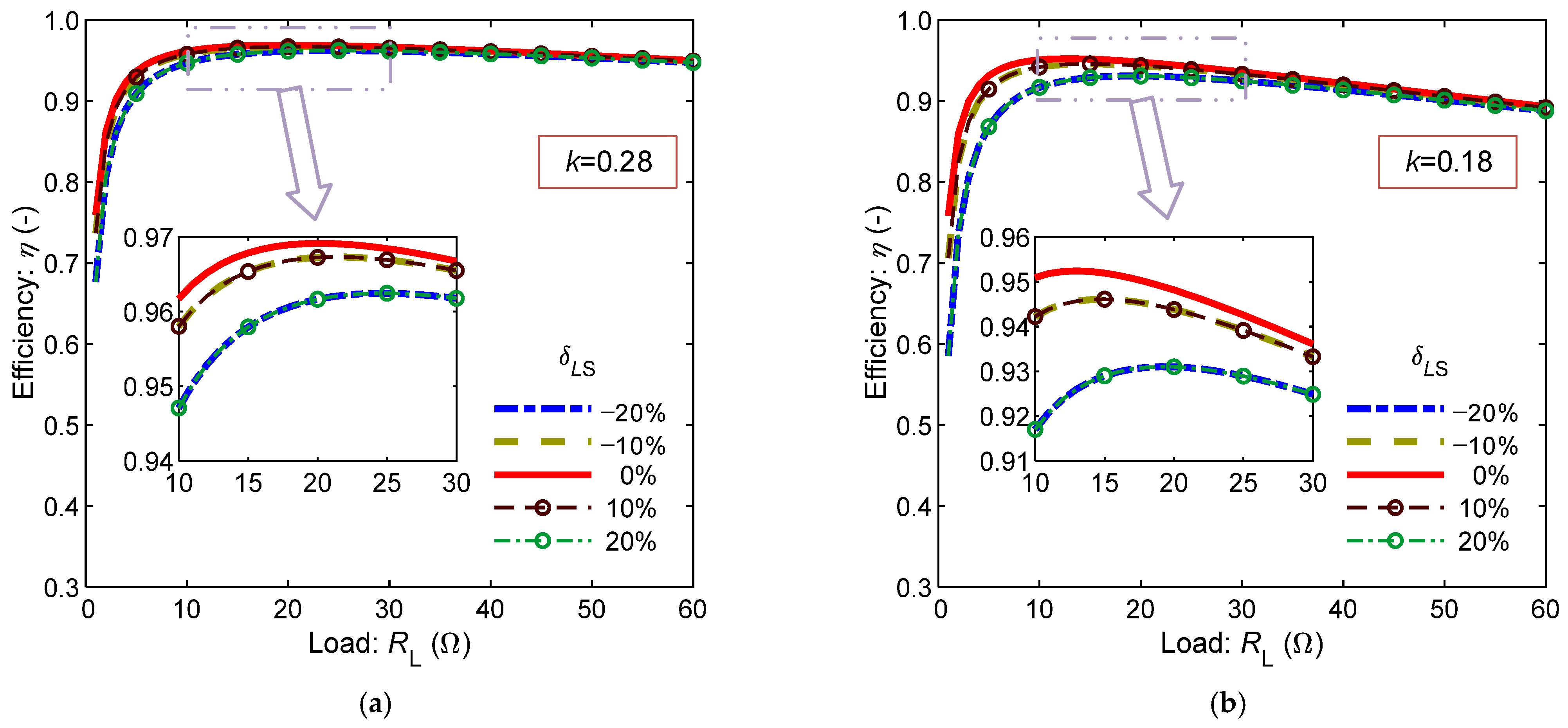
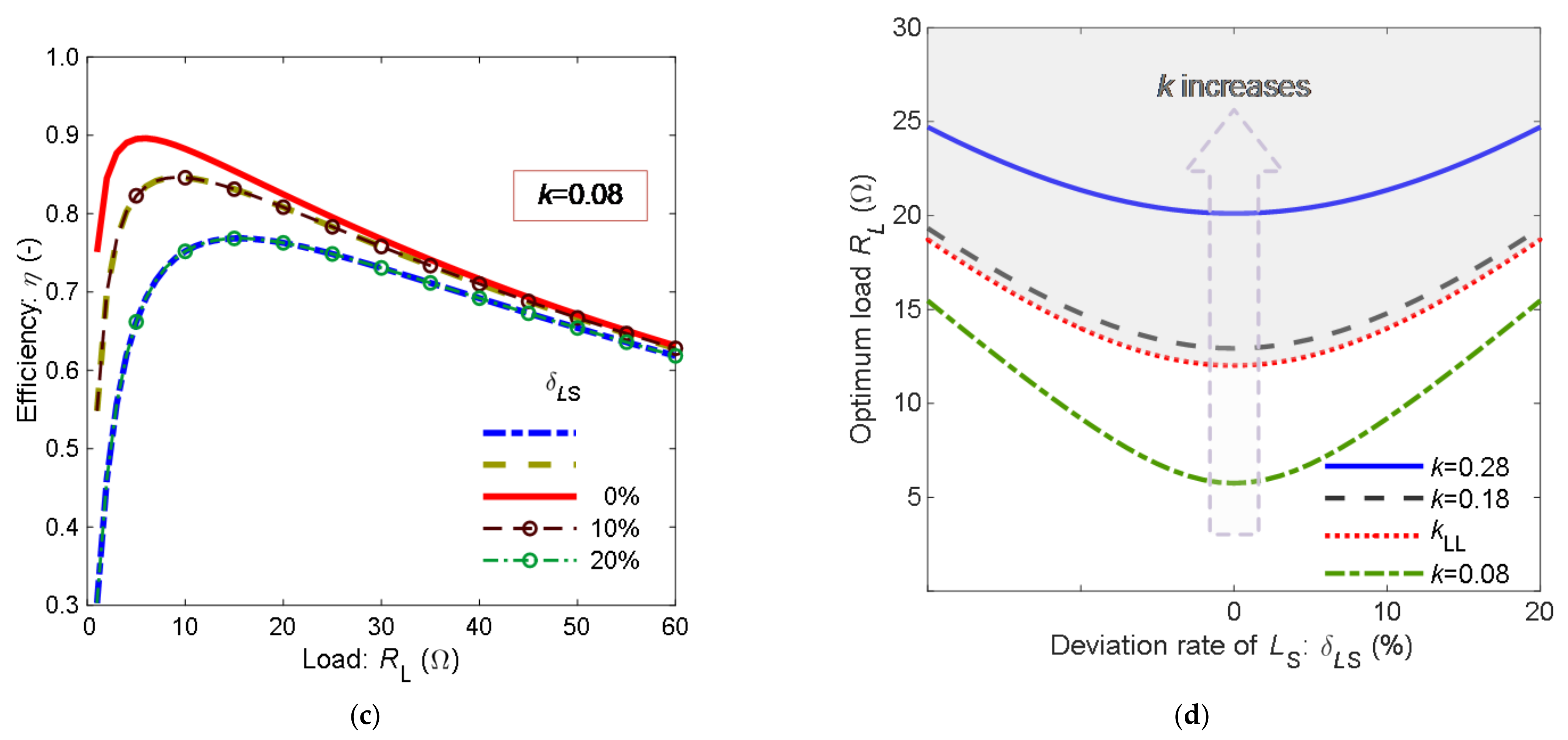
4.2. Simulation Analysis of Efficiency of Mistuned System
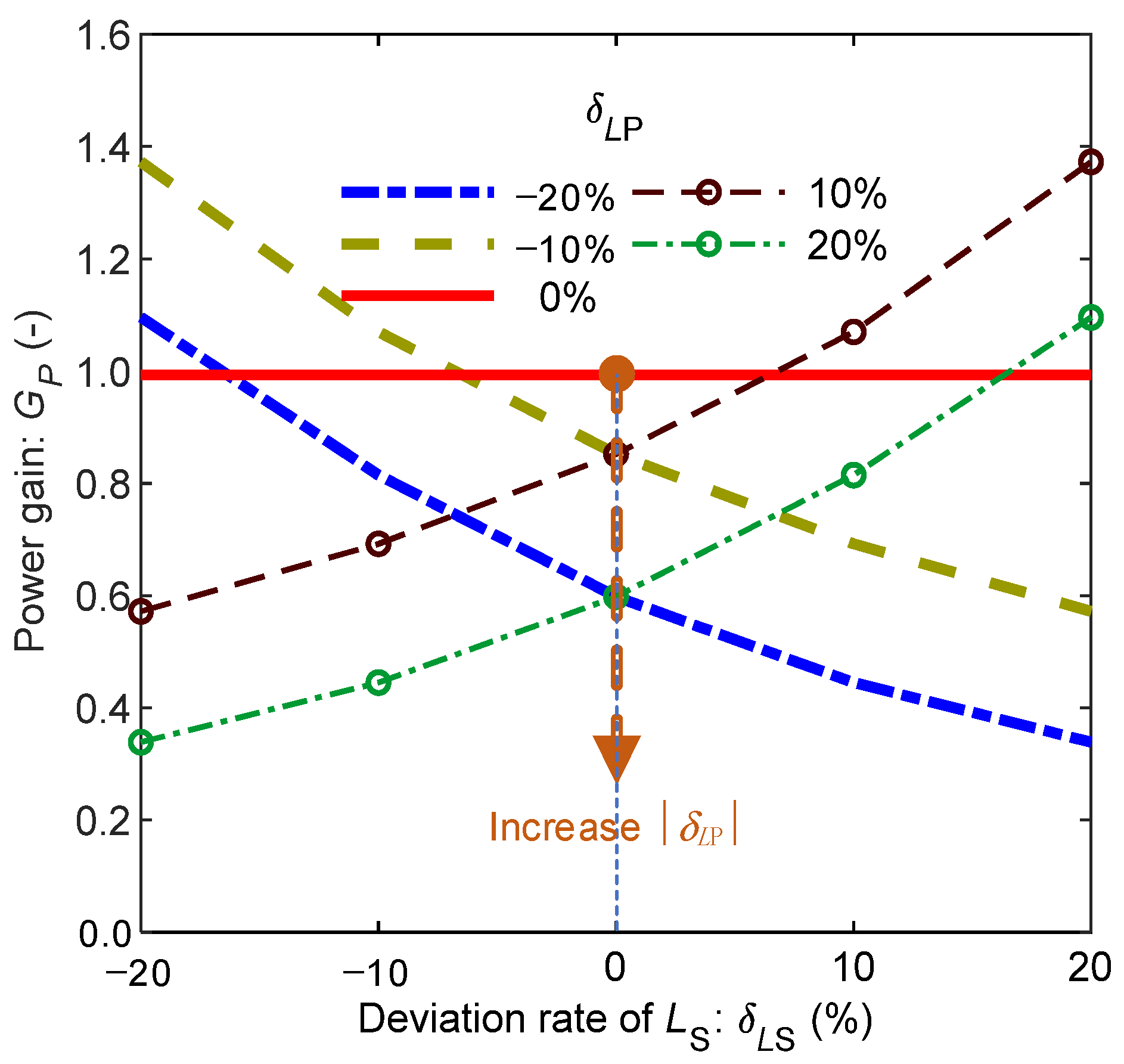
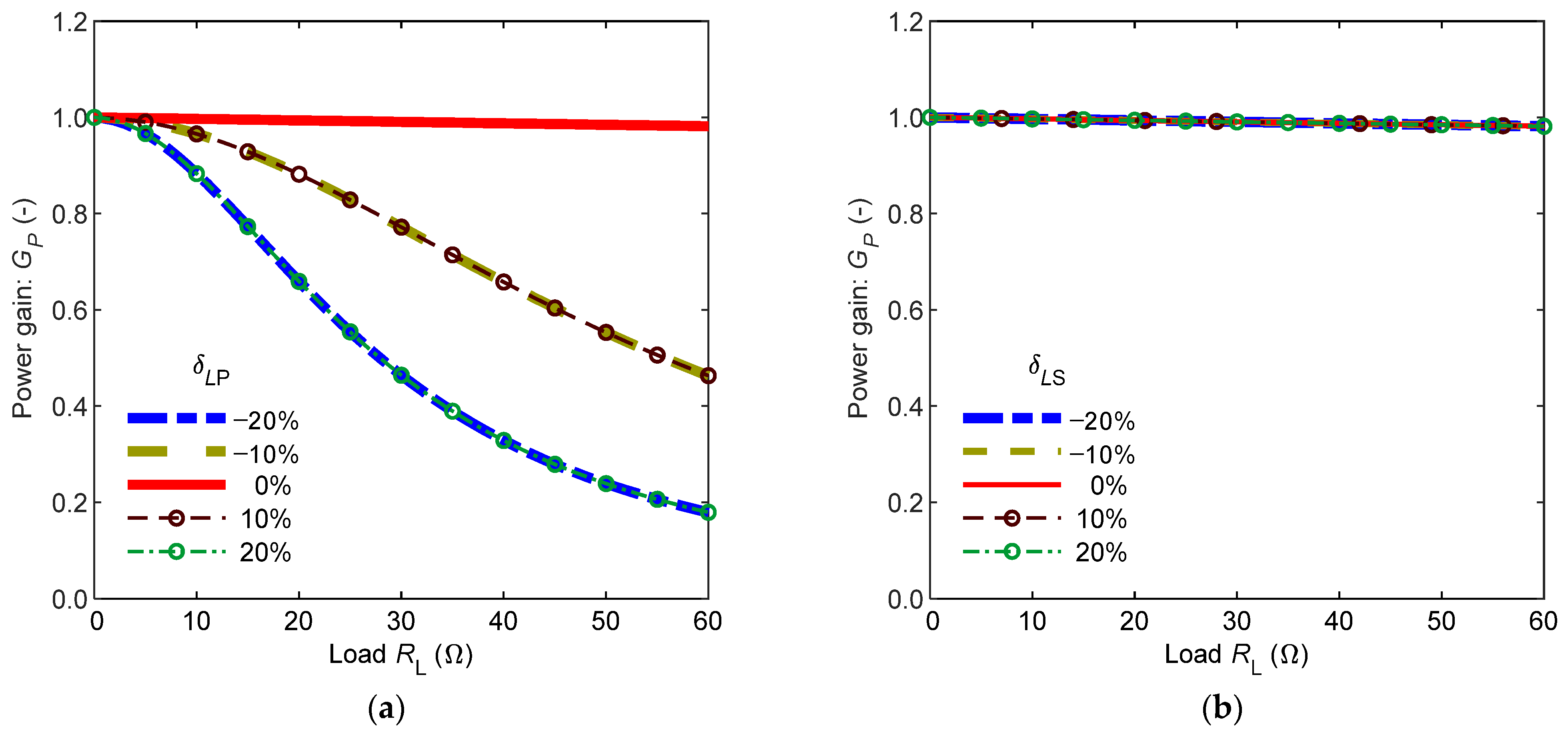
4.3. Simulation Analysis of Power Gain Characteristics of Mistuned Systems
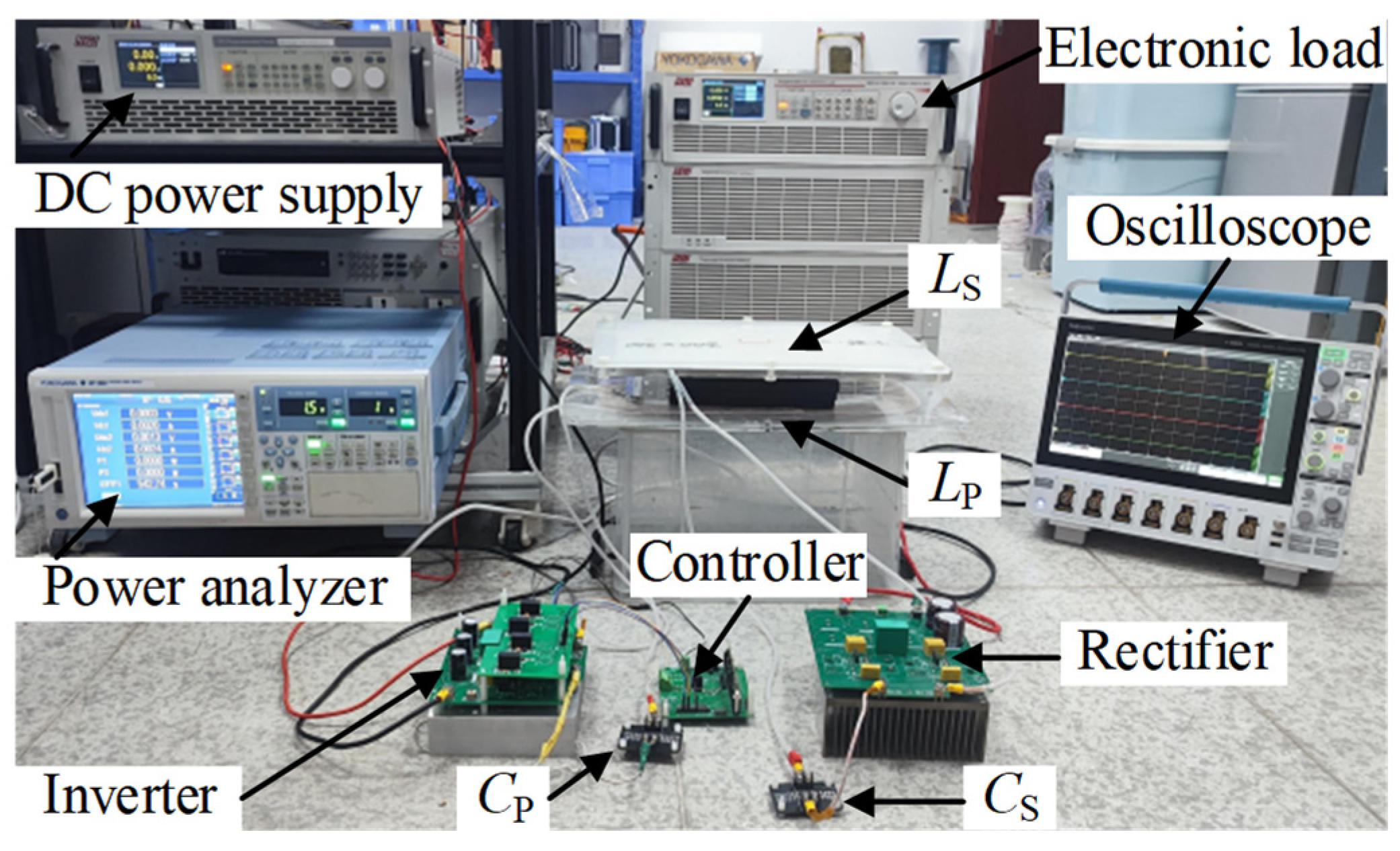
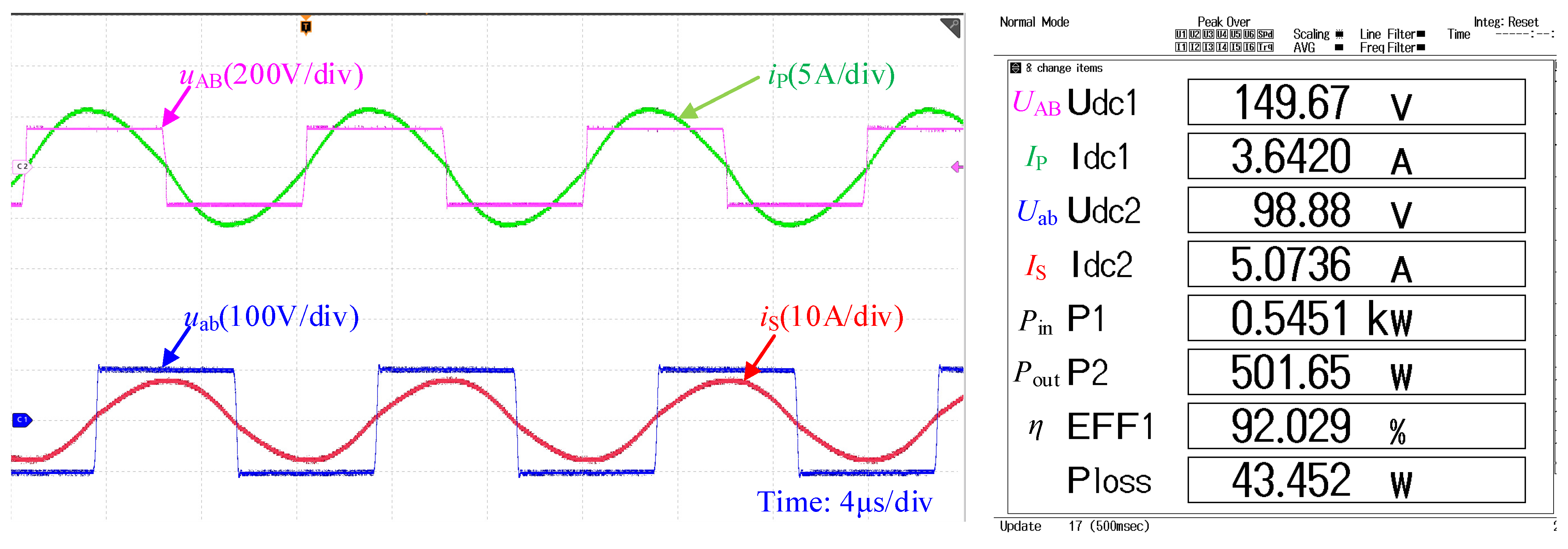
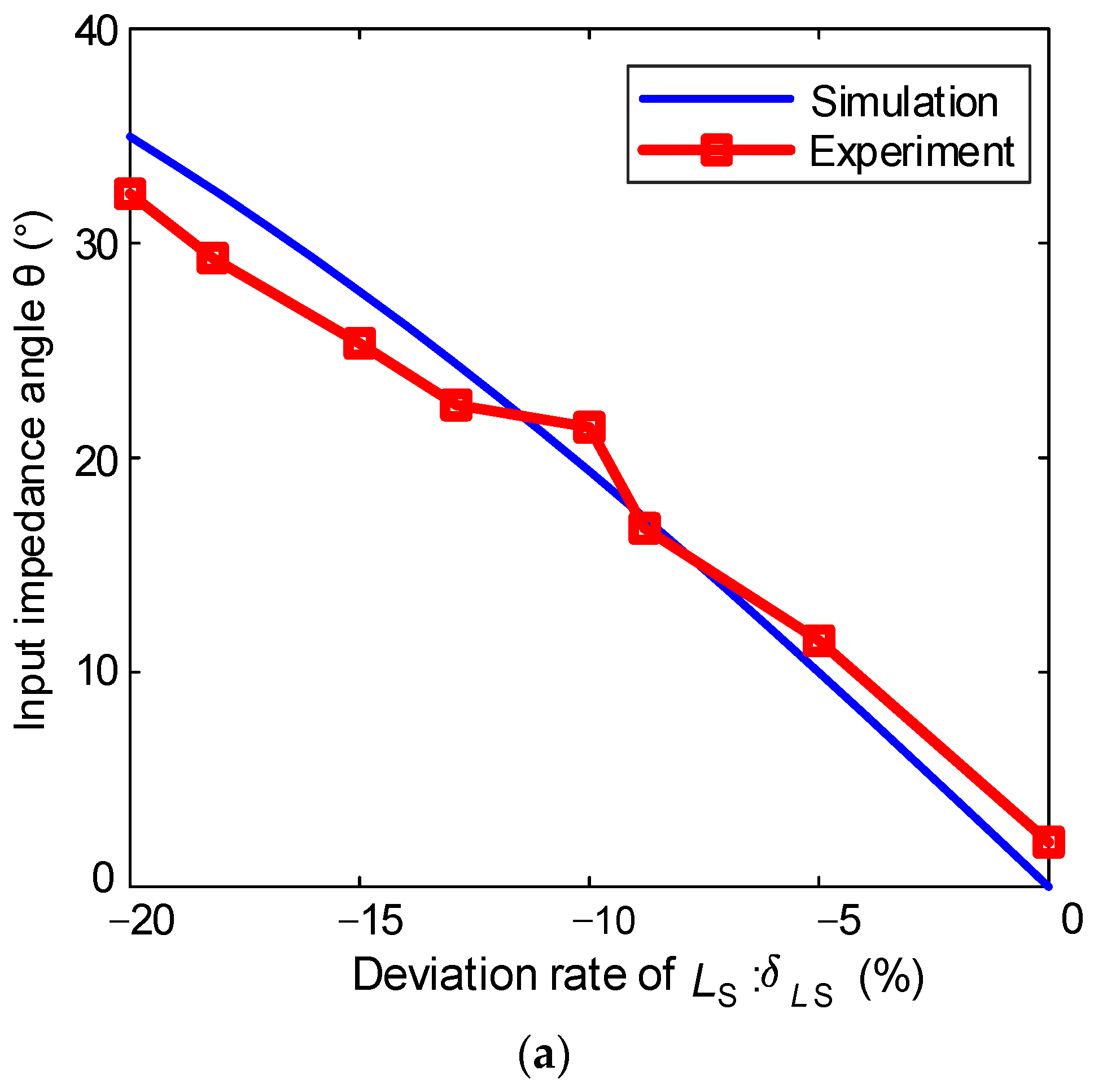
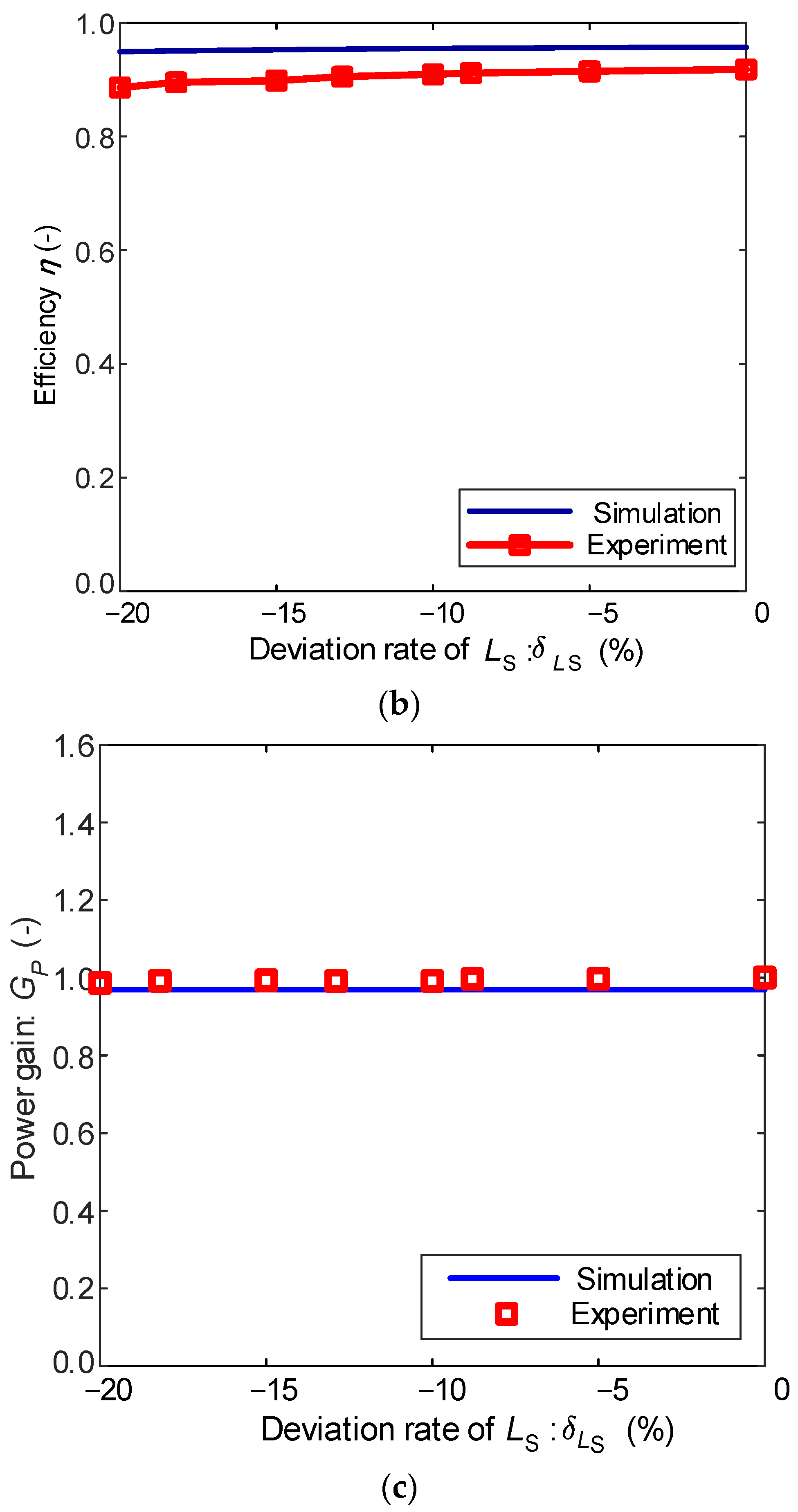
5. Experimental Verification
6. Conclusions
- System mistuning in SS-compensated wireless charging systems, caused by manufacturing tolerances and dynamic charging process variations, significantly affects system input impedance, efficiency, and power characteristics. The transmitter-side parameter deviation ratios exhibit a substantially greater impact on both input impedance and power gain compared to receiver-side deviation ratios. Notably, receiver-side parameter deviation ratios influence system impedance within a narrow frequency band and have minimal effect on power gain.
- Under conditions of strong coupling (high k), the influence of the receiver-side parameter deviation ratios on the efficiency can be neglected when the load resistance exceeds the optimal value. Conversely, in weak coupling scenarios, transmitter-side parameter deviations become non-negligible for efficiency considerations, and the system should operate near the optimal load resistance.
- For practical implementation of SS-compensated wireless charging system, stringent component tolerance requirements should be applied to transmitter-side elements (coil and compensation capacitor), while relatively relaxed specifications may be adopted for receiver-side components. These findings provide theoretical guidance for system design optimization.
- Experimental results demonstrate that the proposed model maintains maximum deviations within 5% for efficiency, 3% for input impedance angle, and 2% for power gain compared to experimental measurements, while exhibiting strong trend agreement. These findings confirm consistency between theoretical and experimental analyses, validating the model’s feasibility and thereby furnishing reliable theoretical support for control strategy development.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Z.; Li, T.; Li, S.; Mi, C.C. Advancements and challenges in wireless power transfer: A comprehensive review. Nexus 2024, 1, 100014. [Google Scholar] [CrossRef]
- Detka, K.; Górecki, K. Wireless Power Transfer—A Review. Energies 2022, 15, 7236. [Google Scholar] [CrossRef]
- Xia, C.; Liu, L.; Liu, Y.; Ma, Z. IPT system for tail-free household appliances in the smart home system. IET Power Electron. 2019, 12, 1002–1010. [Google Scholar] [CrossRef]
- Sedehi, R.; Budgett, D.; Jiang, J.; Ziyi, X.; Dai, X.; Hu, A.P.; McCormick, D. A Wireless Power Method for Deeply Implanted Biomedical Devices via Capacitively Coupled Conductive Power Transfer. IEEE Trans. Power Electron. 2021, 36, 1870–1882. [Google Scholar] [CrossRef]
- Matsumoto, H.; Kanazawa, H.; Uwai, H.; Ishiwaka, R.; Sato, Y. Segment Switching Method of Three-Phase Wireless Power Transmitter for AGV. IEEE Trans. Ind. Electron. 2024, 71, 6490–6500. [Google Scholar] [CrossRef]
- Pahlavan, S.; Shooshtari, M.; Jafarabadi Ashtiani, S. Star-Shaped Coils in the Transmitter Array for Receiver Rotation Tolerance in Free-Moving Wireless Power Transfer Applications. Energies 2022, 15, 8643. [Google Scholar] [CrossRef]
- Niu, S.; Zhao, Q.; Chen, H.; Yu, H.; Niu, S.; Jian, L. Underwater Wireless Charging System of Unmanned Surface Vehicles with High Power, Large Misalignment Tolerance and Light Weight: Analysis, Design and Optimization. Energies 2022, 15, 9529. [Google Scholar] [CrossRef]
- Amjad, M.; Farooq-i-Azam, M.; Ni, Q.; Dong, M.; Ansari, E.A. Wireless charging systems for electric vehicles. Renew. Sustain. Energy Rev. 2022, 167, 112730. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Alsawalhi, J.Y.; Hosani, K.A.; Al-Sumaiti, A.S.; Jaafari, K.A.A.; Byon, Y.-J.; Moursi, M.S.E. Review Map of Comparative Designs for Wireless High-Power Transfer Systems in EV Applications: Maximum Efficiency, ZPA, and CC/CV Modes at Fixed Resonance Frequency Independent From Coupling Coefficient. IEEE Trans. Power Electron. 2022, 37, 4857–4876. [Google Scholar] [CrossRef]
- Bagchi, A.C.; Kamineni, A.; Zane, R.A.; Carlson, R. Review and Comparative Analysis of Topologies and Control Methods in Dynamic Wireless Charging of Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4947–4962. [Google Scholar] [CrossRef]
- Triviño, A.; González-González, J.M.; Aguado, J.A. Wireless Power Transfer Technologies Applied to Electric Vehicles: A Review. Energies 2021, 14, 1547. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, S.; Li, X.; Tang, Y. Design of high-power static wireless power transfer via magnetic induction: An overview. CPSS Trans. Power Electron. Appl. 2021, 6, 281–297. [Google Scholar] [CrossRef]
- Prasad, K.K.; Agarwal, V. Design Recommendations Considering Charging Pads’ Self-Inductance Variation with LCC-S and LCC-LCC Compensation Based IPT Chargers in Low Clearance EVs. IEEE Trans. Transp. Electrif. 2024, 10, 1758–1770. [Google Scholar] [CrossRef]
- Venkatesan, M.; Rajamanickam, N.; Vishnuram, P.; Bajaj, M.; Blazek, V.; Prokop, L.; Misak, S. A Review of Compensation Topologies and Control Techniques of Bidirectional Wireless Power Transfer Systems for Electric Vehicle Applications. Energies 2022, 15, 7816. [Google Scholar] [CrossRef]
- Wang, H.; Pratik, U.; Jovicic, A.; Hasan, N.; Pantic, Z. Dynamic Wireless Charging of Medium Power and Speed Electric Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 12552–12566. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Z.; Liu, J.; Su, H. Analysis and Design of Wireless Charging Systems Without Extra Components for Load-Independent Constant Current and Voltage Battery Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 3200–3210. [Google Scholar] [CrossRef]
- Luo, Z.; Zhao, Y.; Xiong, M.; Wei, X.; Dai, H. A Self-Tuning LCC/LCC System Based on Switch-Controlled Capacitors for Constant-Power Wireless Electric Vehicle Charging. IEEE Trans. Ind. Electron. 2023, 70, 709–720. [Google Scholar] [CrossRef]
- Zou, B.; Huang, Z.; Iam, I.-W.; Lam, C.-S. Tuning Control Against Coupler Parameter Variations Due to Misalignment in an Optimal-Efficiency-Tracking and Constant-Power-Output IPT System. IEEE Trans. Power Electron. 2025, 40, 7500–7511. [Google Scholar] [CrossRef]
- Luo, Y.; Song, Y.; Wang, Z.; Mai, R.; Yang, B.; He, Z. Auto-Segment Control System with High Spatially Average Power for Dynamic Inductive Power Transfer. IEEE Trans. Transp. Electrif. 2023, 9, 3060–3071. [Google Scholar] [CrossRef]
- He, X.; Zeng, Y.; Liu, R.; Lu, C.; Rong, C.; Liu, M. A Dual-Band Coil Array with Novel High-Order Circuit Compensation for Shielding Design in EV Wireless Charging System. IEEE Trans. Ind. Electron. 2024, 71, 2545–2555. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, H.; Li, J.; Cao, Z.; Zhong, W.; Cao, L. A Coordinate Positioning Technique Based on Region Partitioning for EV Wireless Charging System. IEEE Trans. Ind. Electron. 2024, 71, 2443–2453. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Gao, F.; Khan, M.M.; Yang, X.; Rogers, D.J. A Resonant Inductor Integrated-Transformer-Based Receiver for Wireless Power Transfer Systems. IEEE Trans. Ind. Electron. 2023, 70, 3616–3626. [Google Scholar] [CrossRef]
- Hong, W.; Lee, S.; Lee, S.-H. Sensorless Control of Series–Series Tuned Inductive Power Transfer System. IEEE Trans. Ind. Electron. 2023, 70, 10578–10587. [Google Scholar] [CrossRef]
- Zheng, G.; Qi, C.; Liu, Y.; Liang, J.; Wang, H.; Fu, M. Uniform and Simplified Small-Signal Model for Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2023, 38, 2709–2719. [Google Scholar] [CrossRef]
- Lin, F.J.; Lawton, P.A.J.; Covic, G.A. Discrete Modeling of Passive Rectifiers in LCL Tuned Inductive Power Transfer Receivers. IEEE Trans. Power Electron. 2023, 38, 11751–11762. [Google Scholar] [CrossRef]
- Wang, X.; He, L.; Xu, J.; Lee, C.-K.; Tse, C.K. Power-Spilt-Based Wireless Charging System with Communication-Free Coordination Control. IEEE Trans. Power Electron. 2023, 38, 2754–2767. [Google Scholar] [CrossRef]
- Lim, Y.; Tang, H.; Lim, S.; Park, J. An Adaptive Impedance-Matching Network Based on a Novel Capacitor Matrix for Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 4403–4413. [Google Scholar] [CrossRef]
- Beh, T.C.; Kato, M.; Imura, T.; Oh, S.; Hori, Y. Automated Impedance Matching System for Robust Wireless Power Transfer via Magnetic Resonance Coupling. IEEE Trans. Ind. Electron. 2013, 60, 3689–3698. [Google Scholar] [CrossRef]
- Zhang, X.; Xue, R.; Wang, F.; Xu, F.; Chen, T.; Chen, Z. Capacitor Tuning of LCC-LCC Compensated IPT System with Constant-Power Output and Large Misalignments Tolerance for Electric Vehicles. IEEE Trans. Power Electron. 2023, 38, 11928–11939. [Google Scholar] [CrossRef]
- Fu, N.; Deng, J.; Wang, Z.; Chen, D. Dual-Phase-Shift Control Strategy with Switch-Controlled Capacitor for Overall Efficiency Optimization in Wireless Power Transfer System. IEEE Trans. Veh. Technol. 2023, 72, 7304–7317. [Google Scholar] [CrossRef]
- Huang, Z.; Lam, C.-S.; Mak, P.-I.; Martins, R.P.d.S.; Wong, S.-C.; Tse, C.K. A Single-Stage Inductive-Power-Transfer Converter for Constant-Power and Maximum-Efficiency Battery Charging. IEEE Trans. Power Electron. 2020, 35, 8973–8984. [Google Scholar] [CrossRef]
- Song, K.; Lan, Y.; Wei, R.; Yang, G.; Yang, F.; Li, W.; Jiang, J.; Zhu, C.; Li, Y. A Control Strategy for Wireless EV Charging System to Improve Weak Coupling Output Based on Variable Inductor and Capacitor. IEEE Trans. Power Electron. 2022, 37, 12853–12864. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Park, J.H.; Hong, G.P.; Rim, C.T. Autotuning Control System by Variation of Self-Inductance for Dynamic Wireless EV Charging with Small Air Gap. IEEE Trans. Power Electron. 2019, 34, 5165–5174. [Google Scholar] [CrossRef]
- Liu, C.; Lin, F.J.; Thrimawithana, D.J.; Covic, G.A.; Kesler, M. Active Impedance Control for Inductive Charging of Light-Duty Electric Vehicles. IEEE Trans. Power Electron. 2023, 38, 13329–13340. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Compensation | Comprehensive Passive Component Analysis | Wide-Load-Range Analysis | Different Coupling Coefficient Validation | Mistuned Parameter Transformation |
|---|---|---|---|---|---|
| [16] | S-S | X | √ | √ | X |
| [25] | LCC-LCC | √ | √ | √ | X |
| [26] | S-P | X | √ | √ | X |
| [30] | LCC-LCC | X | √ | X | X |
| [34] | LCC-LCC | √ | √ | √ | X |
| This work | S-S | √ | √ | √ | √ |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Nominal self-inductance of primary-side coil | 214 | μH | |
| Nominal self-inductance of secondary-side coil | 109 | μH | |
| Mutual inductance | 0~43.2 | μH | |
| Nominal resonant frequency | 85 | kHz | |
| Normalized frequency | 1 | - | |
| Nominal capacitance of the primary-side compensation capacitor | 16.28 | nF | |
| Nominal capacitance of the secondary-side compensation capacitor | 31.16 | nF | |
| Load resistance | >0 | ||
| Deviation rate of the self-inductance of primary-side coil | −0.2~0.2 | - | |
| Deviation rate of the self-inductance of secondary-side coil | −0.2~0.2 | - |
| No. | Deviation Rate | Equivalent Deviation Rate | ||
|---|---|---|---|---|
| 1 | 16.38 nF | 30.63 nF | ||
| 2 | 29.24 nF | |||
| 3 | 27.97 nF | |||
| 4 | 26.80 nF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Han, Y.; Li, C. Modeling and Characteristic Analysis of Mistuned Series–Series-Compensated Wireless Charging System for EVs. Energies 2025, 18, 4091. https://doi.org/10.3390/en18154091
Li W, Han Y, Li C. Modeling and Characteristic Analysis of Mistuned Series–Series-Compensated Wireless Charging System for EVs. Energies. 2025; 18(15):4091. https://doi.org/10.3390/en18154091
Chicago/Turabian StyleLi, Weihan, Yunhan Han, and Chenxu Li. 2025. "Modeling and Characteristic Analysis of Mistuned Series–Series-Compensated Wireless Charging System for EVs" Energies 18, no. 15: 4091. https://doi.org/10.3390/en18154091
APA StyleLi, W., Han, Y., & Li, C. (2025). Modeling and Characteristic Analysis of Mistuned Series–Series-Compensated Wireless Charging System for EVs. Energies, 18(15), 4091. https://doi.org/10.3390/en18154091