

Sensorless SPMSM Control for Heavy Handling Machines Electrification: An Innovative Proposal




Abstract
1. Introduction
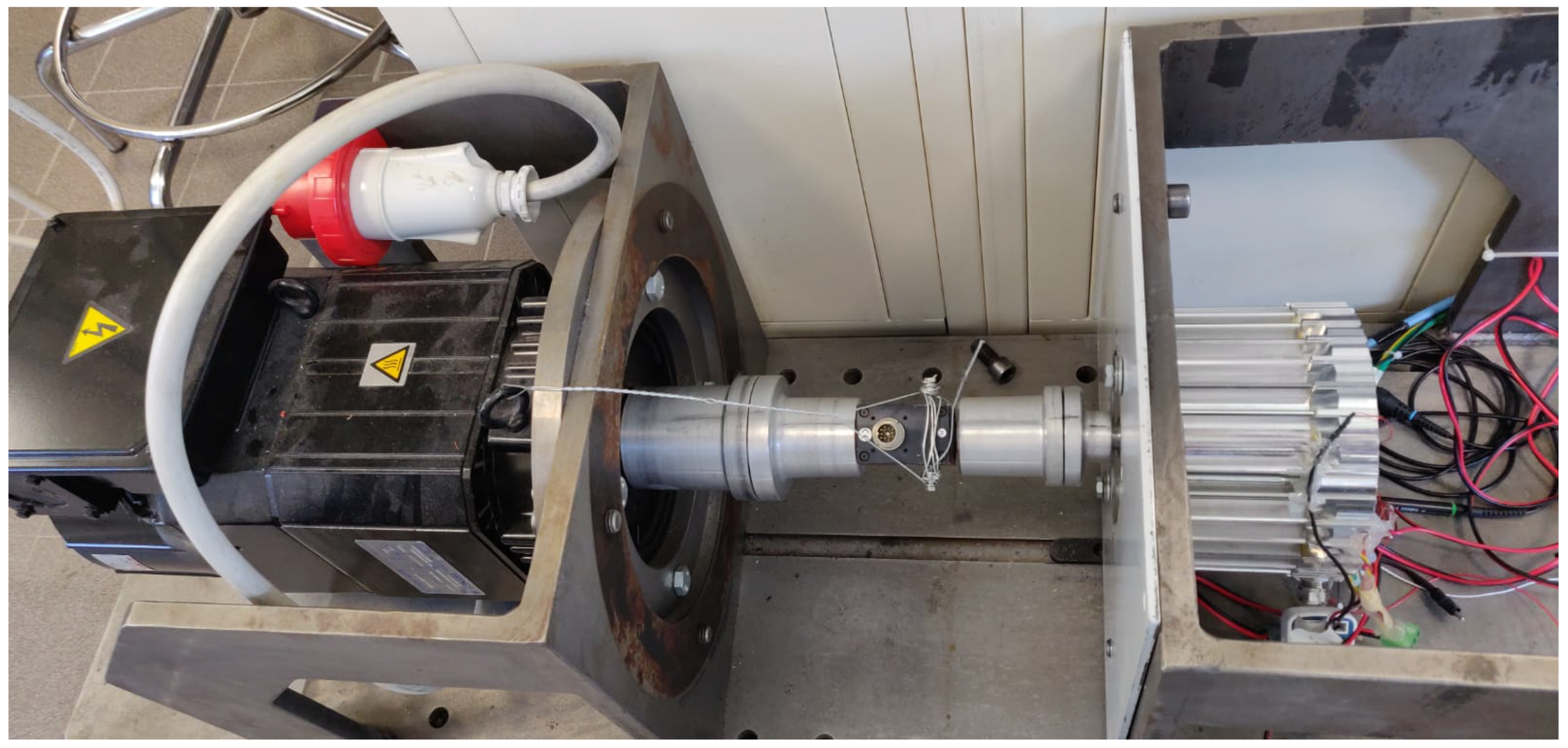
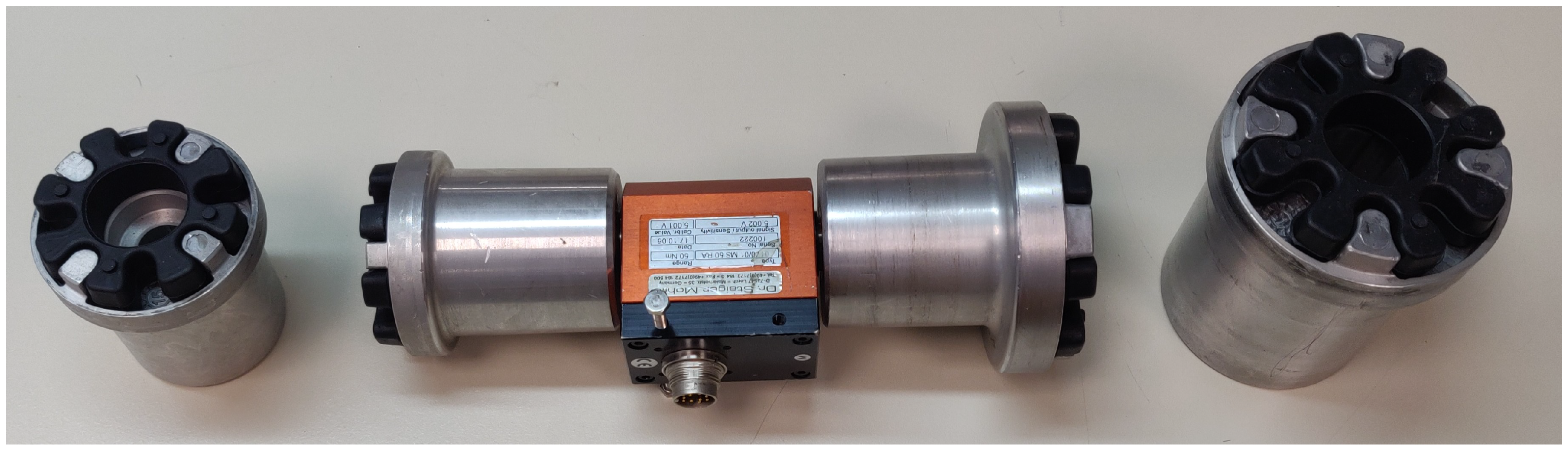
2. Hardware Architecture
3. Modeling and Control
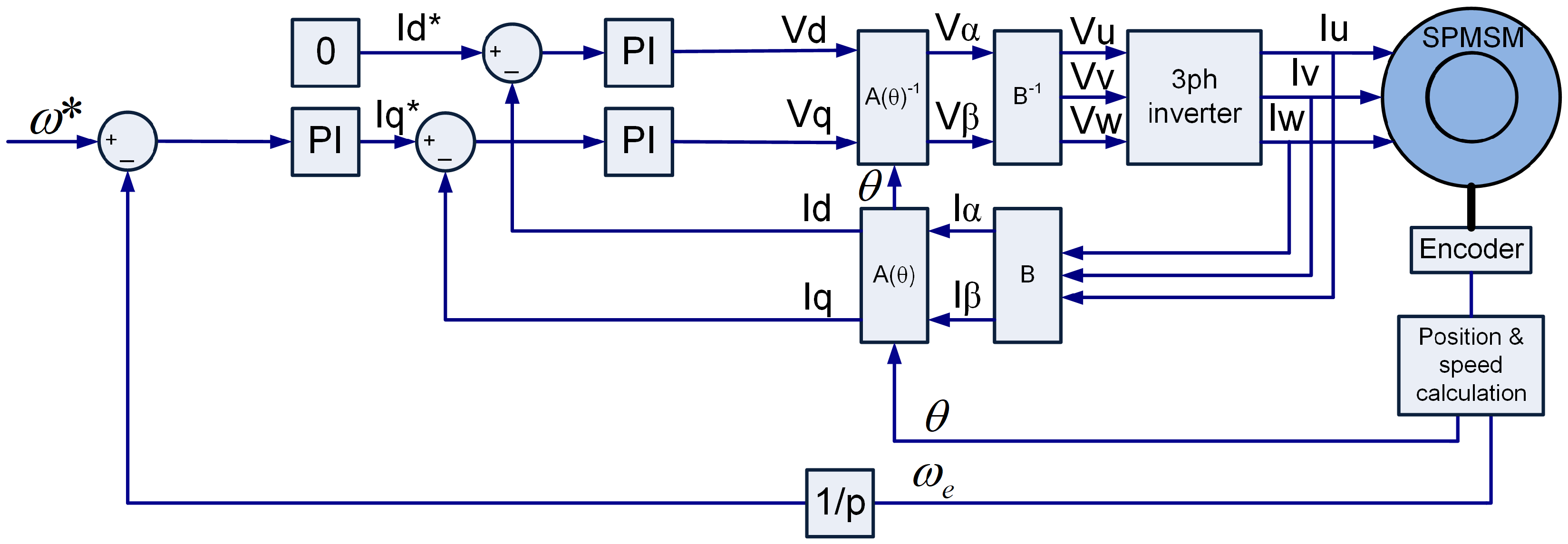
3.1. Field-Oriented Control Modeling
3.2. PI Control Tuning
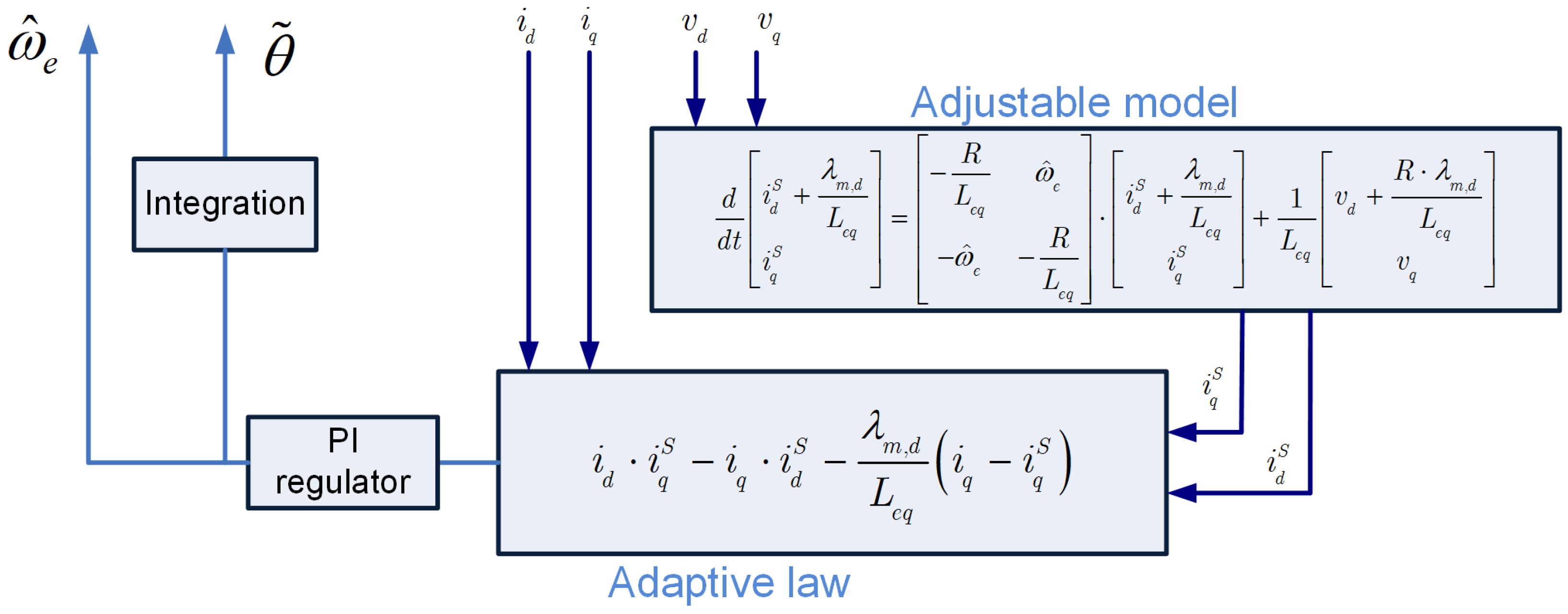
3.3. Sensorless MRAS Algorithm
- Old memory contribution containing the partial sums of the areas under the function until the sample.
- Instantaneous memory contribution containing the value of the area under the function between the and samples.
- Contribution with no memory at sample that is only taken into account as an instantaneous value and it is not integrated at each cycle.
- Old memory
- Instantaneous memory
- No memory
- Old memory
- Instantaneous memory
- No memory
4. Firmware Implementation
- State STANDBYIt is a standby block where the firmware remains idle, waiting for a start command either from a user button or from an Electronic Control Unit (ECU) command.
- State ADC CALIBRATIONBefore powering up the inverter, the electronics circuitry for the current and amplification must be calibrated. To achieve this, 100 samples are averaged for each channel, allowing the determination of a fixed offset that will be subtracted from the current conversion during motor control.
- -
- The state changes to “MOTOR SWITCHING OFF” if a stop command is sent.
- State CONTACTOR CLOSINGBefore activating the devices of the three-phase inverter, it is essential to send the closing signal to the electromechanical safety contactor. Due to its large size and a current rating of , the contactor takes a considerable amount of time to close, up to . If the contactor were closed simultaneously with the inverter devices, which operate instantaneously with the current loops, a significant current error would occur on the d- and q-axes. This is because no current would flow through the current shunt. As a result, the control system would set the modulation indexes of the motor phases to an excessively high value to achieve the desired current. However, at the moment the contactor physically closes, an instantaneous overcurrent would occur during the first control cycles, before the system can react and lower the modulation indexes.
- -
- The state changes to “MOTOR SWITCHING OFF” if an overcurrent as been detected.
- -
- The state changes to “MOTOR SWITCHING OFF” if a stop command is sent.
- State ROTOR ALIGNMENTAs explained in (7) and under the hypothesis of , during motor operation, it is essential to keep the maximum torque angle between the stator and the rotor fields. The Park matrix ensures this by providing current solely on the q-axis, which keeps the magnetic q-axis ahead of the d-axis by 90 electrical degrees. This alignment allows the motor to operate at maximum efficiency and torque density.To achieve this, during the initial step of the state machine, a current is applied to the d-axis for a few seconds by imposing a fixed angle in the Park matrix. This helps the rotor mechanically align along the magnetic axis. Once this alignment is achieved, the current rotor position is used as the starting angle. Two different angles are set 3 s apart in order to prevent the rotor from getting stuck due to being randomly aligned in phase opposition with respect to the field on the d-axis. For simplicity, angles of 30 degrees and 0 degrees are chosen.
- -
- The state changes to “MOTOR SWITCHING OFF” if an overcurrent as been detected.
- -
- The state changes to “MOTOR SWITCHING OFF” if a stop command is sent.
- State ROTOR SYNCRONIZATIONThis state is focused on starting the motor rotation. It is not possible to start the motor directly using the sensorless algorithm because it relies on measuring the back electromotive forces generated on the stator due to the rotation of the magnets. However, at low speeds, these forces are negligible because of the low signal-to-noise ratio. Therefore, the motor start must be driven by generating a fictitious angle through firmware. This angle increases its rotational speed progressively until it reaches a constant speed that is considered reliable enough to switch to the sensorless algorithm. During this spin-up phase, the control operates at low performance and low torque density, as it is not field-oriented control. The angle inserted into the Park matrix does not come from the control feedback block but is a fictitious value, assuming that the rotor will be able to follow it for close the speed loop in the next state.
- -
- The state changes to “MOTOR SLOWING DOWN” if a change in direction is required.
- -
- The state changes to “MOTOR SWITCHING OFF” in case of zero speed request.
- -
- The state changes to “MOTOR SWITCHING OFF” if an overcurrent as been detected.
- -
- The state changes to “MOTOR SWITCHING OFF” if a stop command is sent.
- State SENSORLESS OPERATIONThis is the main program for normal operation in sensorless mode. Once the motor has completed its acceleration in open-loop mode, the program immediately transitions to this state, where a series of controls and delicate actions take place.
- -
- After making the necessary adjustments, the instantaneous position reached by the motor in open-loop mode is copied and transferred into the sensorless variables. This allows the Park matrix to be controlled by the algorithm itself, and the speed loop is then closed using the estimated speed.
- -
- The estimated speed is analyzed to ensure it meets the minimum acceptable values. If the speed is within the expected range, the motor is considered to be properly started and synchronized with the sensorless algorithm. However, if the motor has lost synchronization, the state transitions to “MOTOR SLOWING DOWN.”
- -
- The acceleration ramps are controlled based on the speed requested by the user, and the direction reversal is handled automatically, managing the entire restart process seamlessly.
- -
- To prevent the overcurrent protection from triggering, the values of the proportional and integral constants, as well as the output saturations of the current PI regulators, are gradually adjusted in 4 steps, with each step occurring every 100 ms.
- -
- Additionally, there is an algorithm designed to appropriately adjust the braking output saturation values of the current PI regulators based on the direction of rotation. This helps prevent excessive braking of the motor, which could cause an overvoltage on the DC bus of the inverter. In cases where there is no regenerative DC source or braking resistor, such an overvoltage could lead to a non-reversible failure of the inverter.
- -
- The state changes to “MOTOR SLOWING DOWN” if a change in direction is required.
- -
- In case of zero speed request the state becomes MOTOR SWITCHING OFF.
- -
- The state changes to “MOTOR SWITCHING OFF” if an overcurrent as been detected.
- -
- The state changes to “MOTOR SWITCHING OFF” if a stop command is sent.
- State MOTOR SLOWING DOWNIt is a time frame designed to wait for the motor to slow down before automatically restarting the entire process.
- -
- The state changes to “ADC CALIBRATION” after the slowing down time has elapsed.
- -
- The state changes to “MOTOR SWITCHING OFF” if a stop command is sent.
- State MOTOR SWITCHING OFFIt is a time frame to allow for the motor to slow down before transitioning to the STANDBY state.
5. Experimental Results
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Song, Z.; Liu, S.; Huang, R.; Liu, C. Overview of Integrated Electric Motor Drives: Opportunities and Challenges. Energies 2022, 15, 8299. [Google Scholar] [CrossRef]
- Lajunen, A.; Sainio, P.; Laurila, L.; Pippuri-Mäkeläinen, J.; Tammi, K. Overview of Powertrain Electrification and Future Scenarios for Non-Road Mobile Machinery. Energies 2018, 11, 1184. [Google Scholar] [CrossRef]
- Bassani, M.; Pinardi, D.; Toscani, A.; Manconi, E.; Concari, C. Active Vibration Control via Current Injection in Electric Motors. Electronics 2024, 13, 3442. [Google Scholar] [CrossRef]
- Wang, F.; Hong, J.; Xu, B.; Fiebig, W.J. Control Design of a Hydraulic Cooling Fan Drive for Off-Road Vehicle Diesel Engine With a Power Split Hydraulic Transmission. IEEE/ASME Trans. Mechatron. 2022, 27, 3717–3729. [Google Scholar] [CrossRef]
- Sudha, B.; Vadde, A.; Sachin, S. A review: High power density motors for electric vehicles. J. Phys. Conf. Ser. 2020, 1706, 012057. [Google Scholar] [CrossRef]
- Danfoss Power Solutions. Product Reliability Data (MTTF) for H1P045-280. 2023. Available online: https://assets.danfoss.com/documents/latest/257866/AB159286485026en-000301.pdf (accessed on 12 May 2025).
- Tavner, P.; Ran, L.; Penman, J.; Sedding, H. Condition Monitoring of Rotating Electrical Machines; Bibliovault OAI Repository, The University of Chicago Press: Chicago, IL, USA, 2008. [Google Scholar] [CrossRef]
- Toscani, A.; Immovilli, F.; Pinardi, D.; Cattani, L. A Novel Scalable Digital Data Acquisition System for Industrial Condition Monitoring. IEEE Trans. Ind. Electron. 2024, 71, 7975–7985. [Google Scholar] [CrossRef]
- Toscani, A.; Rocchi, N.; Pinardi, D.; Binelli, M.; Saccenti, L.; Farina, A.; Pavoni, S.; Vanali, M. Low-Cost Condition Monitoring System for Smart Buildings and Industrial Applications. IEEE Trans. Ind. Appl. 2024, 60, 1870–1878. [Google Scholar] [CrossRef]
- Miller, M.; Khalid, H.; Michael, P.; Guevremont, J.; Garelick, K.; Pollard, G.; Whitworth, A.; Devlin, M. An Investigation of Hydraulic Motor Efficiency and Tribological Surface Properties. Tribol. Trans. 2014, 57, 622–630. [Google Scholar] [CrossRef]
- Lu, S.M. A review of high-efficiency motors: Specification, policy, and technology. Renew. Sustain. Energy Rev. 2016, 59, 1–12. [Google Scholar] [CrossRef]
- EMP. FiC-15 HV Fan. 2025. Available online: https://www.emp-corp.com/product/15-inch-high-voltage-fan/ (accessed on 12 May 2025).
- Wiik, M.K.; Fjellheim, K.; Suul, J.A.; Azrague, K. Electrification of Excavators: Electrical configurations, carbon footprint, and cost assessment of retrofit solutions. IEEE Electrif. Mag. 2023, 11, 24–34. [Google Scholar] [CrossRef]
- Fan, H.; Huang, Z.; Xie, Y. Cost-effectiveness assessment of retrofitting construction equipment for reducing diesel emissions—A life cycle and public health effects perspective. Environ. Impact Assess. Rev. 2025, 113, 107864. [Google Scholar] [CrossRef]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. Am. Soc. Mech. Eng. 1942, 64, 759–765. [Google Scholar] [CrossRef]
- Bendjedia, B.; Chouireb, S. Comparative study between sensorless vector control of PMSM drives based on MRAS, SMO and EKF observers. In Proceedings of the 2023 International Conference on Advances in Electronics, Control and Communication Systems (ICAECCS), Blida, Algeria, 6–7 March 2023; pp. 1–6. [Google Scholar]
- Zheng, Z.; Li, Y.; Fadel, M. Sensorless control of PMSM based on extended kalman filter. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–8. [Google Scholar]
- Zuo, Y.; Lai, C.; Iyer, K.L.V. A review of sliding mode observer based sensorless control methods for PMSM drive. IEEE Trans. Power Electron. 2023, 38, 11352–11367. [Google Scholar] [CrossRef]
- Kim, H.; Son, J.; Lee, J. A High-Speed Sliding-Mode Observer for the Sensorless Speed Control of a PMSM. IEEE Trans. Ind. Electron. 2011, 58, 4069–4077. [Google Scholar] [CrossRef]
- Wu, J.; Wei, H.; Zhang, Y.; Wei, H. Sensorless vector control of permanent magnet synchronous motor based on model reference adaptive system. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 2879–2883. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, Z.Q.; Howe, D.; Bingham, C.M.; Stone, D. Improved Rotor Position Estimation by Signal Injection in Brushless AC Motors, Accounting for Cross-Coupling Magnetic Saturation. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 2357–2364. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Processor-in-the-Loop Validation of a Gradient Descent-Based Model Predictive Control for Assisted Driving and Obstacles Avoidance Applications. IEEE Access 2022, 10, 67958–67975. [Google Scholar] [CrossRef]
- Dini, P.; Ariaudo, G.; Botto, G.; Greca, F.L.; Saponara, S. Real-time electro-thermal modelling and predictive control design of resonant power converter in full electric vehicle applications. IET Power Electron. 2023, 16, 2045–2064. [Google Scholar] [CrossRef]
- Brugnano, F.; Concari, C.; Imamovic, E.; Savi, F.; Toscani, A.; Zanichelli, R. A simple and accurate algorithm for speed measurement in electric drives using incremental encoder. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October 2017–1 November 2017; pp. 8551–8556. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit of Measure |
|---|---|---|
| Nominal voltage | 32 | V |
| Nominal frequency | 233 | Hz |
| Nominal current | 58 | A |
| Nominal power | 3000 | W |
| Nominal speed | 3500 | rpm |
| Nominal torque | 8.1 | Nm |
| Pole pairs | 4 | - |
| Torque constant | 0.14 | Nm/A |
| Voltage constant | 8.7 | V/krpm |
| Stator resistance | 8.2 | mΩ |
| Stator inductance | 0.032 | mH |
| Power factor | 0.99 | - |
| Mechanical Basic Data | Value |
|---|---|
| Mechanical overload capacity | 1.5 × rated torque |
| Max. speed up to 18 Nm | 12,000 rpm |
| Max. speed from 20 to 160 Nm | 9000 rpm |
| Max. speed from 250 to 1000 Nm | 7000 rpm |
| Angle measurement | 2 × 360 pulses, 90° displaced, TTL |
| Protection class | IP40 |
| Electrical Specifications | Value |
| Accuracy class | 0.2 |
| Linearity, hysteresis related to nominal value | ±0.2% of full scale |
| Voltage output for rated torque | ±5 V DC |
| Temperature influence on the zero point | ±0.15% / 10 K |
| Temperature influence on the nominal value | ±0.15% / 10 K |
| Rated temperature range | +5 to +50 °C |
| Operating temperature range | −25 to +80 °C |
| Electrical connection | 12-pole Tuchel |
| Supply voltage | 11 to 26 V DC, pole-secure |
| Current consumption | 1 W |
| Parameter | Sensorless | Sensored | Unit of Measure |
|---|---|---|---|
| Rise time | 250 | 150 | ms |
| Settling time | 450 | 175 | ms |
| Delay time | 150 | 60 | ms |
| Overshoot | 4 | 3 | % |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bassani, M.; Toscani, A.; Concari, C. Sensorless SPMSM Control for Heavy Handling Machines Electrification: An Innovative Proposal. Energies 2025, 18, 4021. https://doi.org/10.3390/en18154021
Bassani M, Toscani A, Concari C. Sensorless SPMSM Control for Heavy Handling Machines Electrification: An Innovative Proposal. Energies. 2025; 18(15):4021. https://doi.org/10.3390/en18154021
Chicago/Turabian StyleBassani, Marco, Andrea Toscani, and Carlo Concari. 2025. "Sensorless SPMSM Control for Heavy Handling Machines Electrification: An Innovative Proposal" Energies 18, no. 15: 4021. https://doi.org/10.3390/en18154021
APA StyleBassani, M., Toscani, A., & Concari, C. (2025). Sensorless SPMSM Control for Heavy Handling Machines Electrification: An Innovative Proposal. Energies, 18(15), 4021. https://doi.org/10.3390/en18154021