
Evaluation of Seismicity Induced by Geothermal Development Based on Artificial Neural Network


Abstract
1. Introduction
2. Model Construction
2.1. Network Structure Parameter
2.2. Model Training and Error Analysis
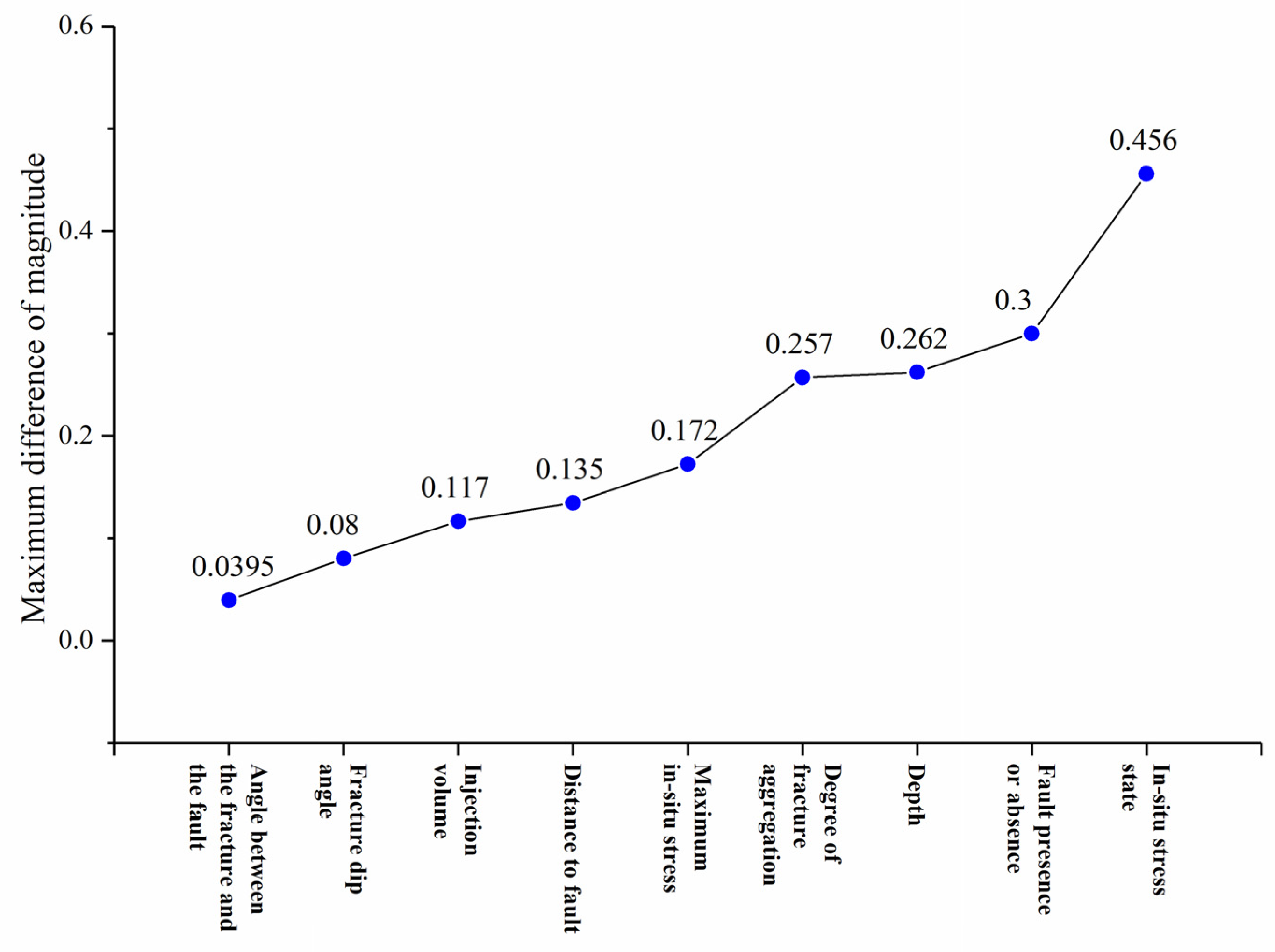
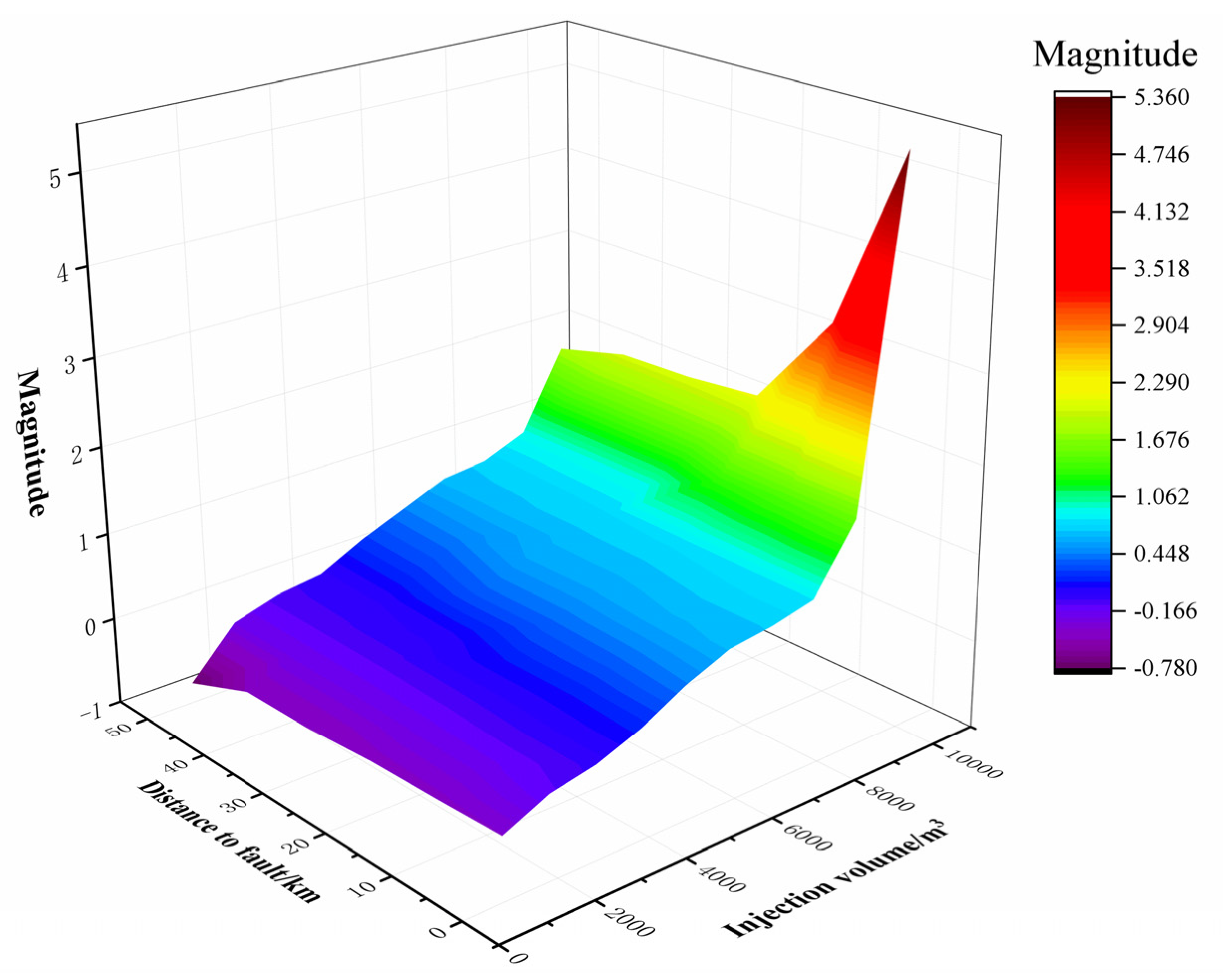
3. Parameter Sensitivity Analysis
4. Model Application
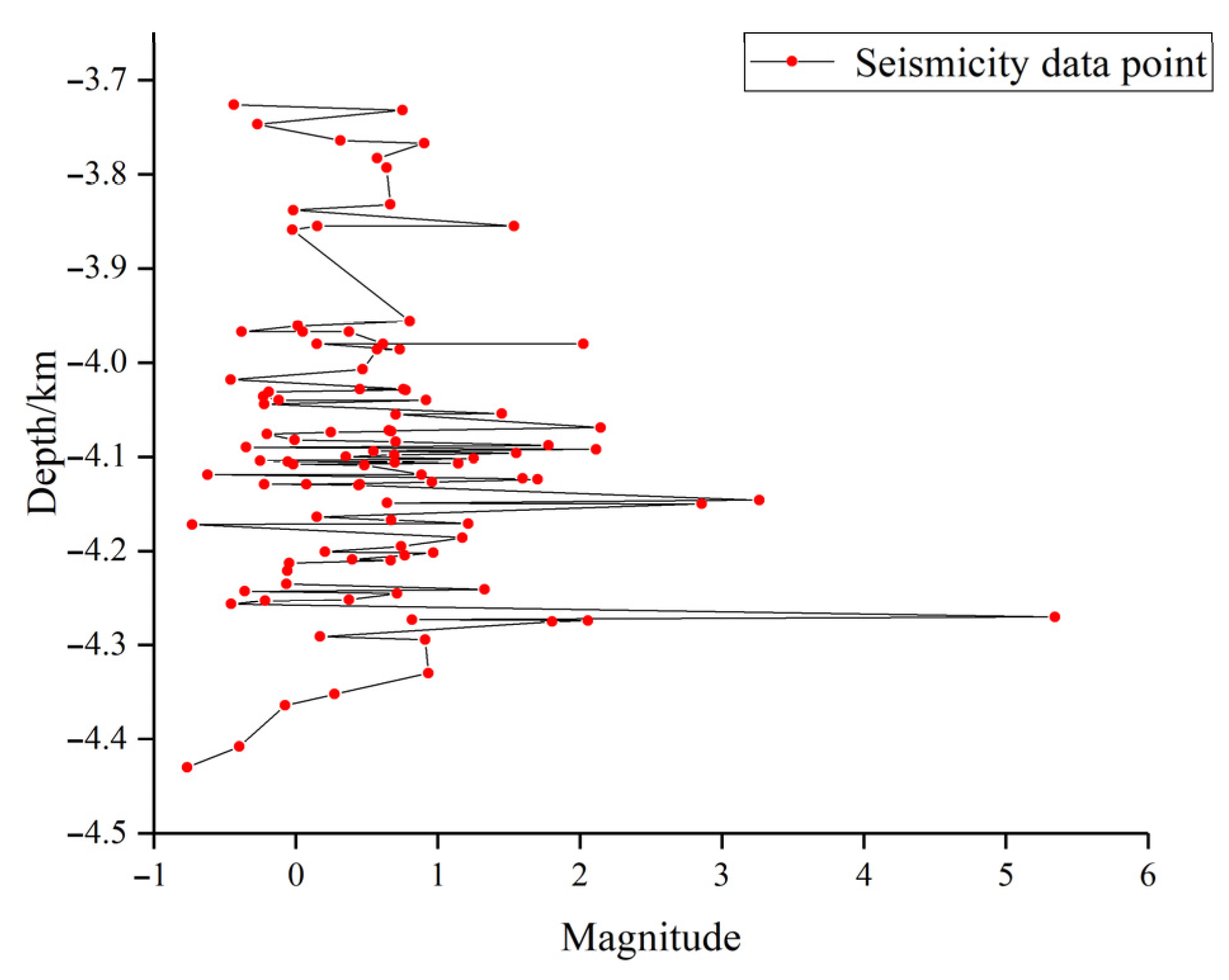
4.1. Pohang EGS Project Overview
4.2. Application of Neural Network Model
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ellabban, H.; Abu-Rub, F. Blaabjerg. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Barbier, E. Geothermal Energy Technology and Current Status: An Overview. Renew. Sustain. Energy Rev. 2002, 6, 3–65. [Google Scholar] [CrossRef]
- Olasolo, P.; Juárez, M.C.; Morales, M.P.; Damico, S.; Liarte, I.A. Enhanced geothermal systems (EGS): A review. Renew. Sustain. Energy Rev. 2016, 56, 133–144. [Google Scholar] [CrossRef]
- Lu, S.-M. A global review of enhanced geothermal system (EGS) Renew. Sustain. Energy Rev. 2018, 81, 2902–2921. [Google Scholar] [CrossRef]
- Majer, E.L.; Baria, R.; Stark, M.; Oates, S.; Bommer, J.; Smith, B.; Asanuma, H. Induced seismicity associated with Enhanced Geothermal Systems. Geothermics 2007, 36, 185–222. [Google Scholar] [CrossRef]
- Catalli, F.; Rinaldi, A.P.; Gischig, V.; Nespoli, M.; Wiemer, S. The importance of earthquake interactions for injection-induced seismicity: Retrospective modeling of the Basel Enhanced Geothermal System. Geophys. Res. Lett. 2016, 43, 4992–4999. [Google Scholar] [CrossRef]
- Goertz-Allmann, B.; Goertz, A.; Wiemer, S. Stress Drop Variations of Induced Earthquakes at the Basel Geothermal Site. Geophys. Res. Lett. 2011, 38, L09308. [Google Scholar] [CrossRef]
- Johnson, L.R.; Majer, E.L. Induced and triggered earthquakes at The Geysers geothermal reservoir. Geophys. J. Int. 2017, 209, 1221–1238. [Google Scholar] [CrossRef]
- Lin, G.; Thurber, C.H. Seismic velocity variations along the rupture zone of the 1989 Loma Prieta earthquake, California. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef]
- Kim, K.-H.; Ree, J.-H.; Kim, Y.; Kim, S.; Su, Y.K.; Seo, W. Assessing whether the 2017 Mw 5.4 Pohang earthquake in South Korea was an induced event. Science 2018, 360, 6392. [Google Scholar] [CrossRef]
- Shapiro, S.A.; Kim, K.H.; Ree, J.H. Magnitude and nucleation time of the 2017 Pohang Earthquake point to its predictable artificial triggering. Nat. Commun. 2021, 12, 6397. [Google Scholar] [CrossRef] [PubMed]
- Shan, K.; Zhang, Y.; Zheng, Y.; Li, L.; Deng, H. Risk assessment of fracturing induced earthquake in the Qiabuqia Geothermal Field, China. Energies 2020, 13, 5977. [Google Scholar] [CrossRef]
- Prezioso, E.; Sharma, N.; Piccialli, F.; Convertito, V. A data-driven artificial neural network model for the prediction of ground motion from induced seismicity: The case of the geysers geothermal field. Front. Earth Sci. 2022, 10, 917608. [Google Scholar] [CrossRef]
- Grigoli, F.; Cesca, S.; Priolo, E.; Rinaldi, A.P.; Clinton, J.F.; Stabile, T.A.; Dost, B.; Fernandez, M.G.; Wiemer, S.; Dahm, T. Current challenges in monitoring, discrimination, and management of induced seismicity related to underground industrial activities: A European perspective. Rev. Geophys. 2017, 55, 310–340. [Google Scholar] [CrossRef]
- Deichmann, N.; Giardini, D. Earthquakes induced by the stimulation of an enhanced geothermal system below basel (Switzerland). Seismol. Res. Lett. 2020, 80, 784–798. [Google Scholar] [CrossRef]
- Gaucher, E.; Schoenball, M.; Heidbach, O.; Zang, A.; Fokker, P.A.; van Wees, J.D.; Kohl, T. Induced seismicity in geothermal reservoirs: A review of forecasting approaches. Renew. Sustain. Energy Rev. 2015, 52, 1473–1490. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef]
- Adeli, H.; Panakkat, A. A probabilistic neuralnetwork for earthquake magnitude prediction. Neural Netw. 2009, 22, 1018–1024. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Guo, Y.; Yu, L.; Li, P. Earthquake prediction based on spatio-temporal data mining: An LSTM network approach. IEEE Trans. Emerg. Top. Comput. 2017, 8, 148–158. [Google Scholar] [CrossRef]
- Ashif, P.; Hojjat, A. Neural network model for earthquake magnitude prediction using multiple seismicity indicator. Int. J. Syst. 2007, 17, 13–33. [Google Scholar]
- Panakkat, A.; Adeli, H. Recurrent neural network for approximate earthquake time and location prediction using multiple seismicity indicators. Comput. Aided Civ. Infrastruct. Eng. 2009, 24, 280–292. [Google Scholar] [CrossRef]
- Zhang, H.; Alkhalifah, T.; Liu, Y.; Birnie, C.; Di, X. Improving the generalization of deep neural networks in seismic resolution enhancement. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Zhou, J.C.; Wen, X.Y.; Guo, M.J. A symmetric difference data enhancement physics-informed neural network for the solving of discrete nonlinear lattice equations. Commun. Theor. Phys. 2025, 77, 065002. [Google Scholar] [CrossRef]
- Yu, X.; Jin, G.; Li, J. Target tracking algorithm for system with gaussian/non-gaussian multiplicative noise. IEEE Trans. Veh. Technol. 2019, 69, 90–100. [Google Scholar] [CrossRef]
- Kotecha, J.H.; Djuric, P.M. Gaussian particle filtering. IEEE Trans. Signal Process. 2003, 51, 2592–2601. [Google Scholar] [CrossRef]
- Drechsler, M. Sensitivity analysis of complex models. Biol. Conserv. 1998, 86, 401–412. [Google Scholar] [CrossRef]
- Liu, Y.P.; Wang, S.; Gong, C.S.; Zeng, D.W.; Ren, Y.L.; Li, X. Sensitivity Analysis of the Land Surface Characteristic Parameters in Different Climatic Regions of the Loess Plateau. Atmosphere 2023, 14, 1528. [Google Scholar] [CrossRef]
- Xue, X.; Ren, Z.Y.; Zhang, Y.X.; Gao, A.H. The study of sensitivity analysis of parameters of groundwater numerical simulation. Adv. Mat. Res. 2013, 726, 3564–3569. [Google Scholar] [CrossRef]
- Li, Z.; Elsworth, D.; Wang, C. Constraining maximum event magnitude during injection-triggered seismicity. Nat. Commun. 2021, 12, 1528. [Google Scholar] [CrossRef]
- Grünthal, G. Induced seismicity related to geothermal projects versus natural tectonic earthquakes and other types of induced seismic events in central Europe. Geothermics 2014, 52, 2235. [Google Scholar] [CrossRef]
- Yeo, I.-W.; Brown, M.R.M.; Ge, S.; Lee, K.K. Causal mechanism of injection-induced earthquakes through the Mw 5.5 Pohang earthquake case study. Nat. Commun. 2020, 11, 2614. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, J.; Zhu, T.; Li, J. Experimental and MPM modelling of widened levee failure under the combined effect of heavy rainfall and high riverine water levels. Comput. Geotech. 2025, 184, 107259. [Google Scholar] [CrossRef]
- Picozzi, M.; Iaccarino, A.G. Forecasting the preparatory phase of induced earthquakes by recurrent neural network. Forecasting 2021, 3, 17–36. [Google Scholar] [CrossRef]
- Nooshiri, N.; Bean, C.J.; Dahm, T.; Grigoli, F.; Kristjansdottir, S.; Obermann, A.; Wiemer, S. A multi-branch, multi-target neural network for rapid point-source inversion in a micro-seismic environment: Examples from the hengill geothermal field, iceland. Geophys. J. Int. 2022, 229, 999–1016. [Google Scholar] [CrossRef]
- Zheng, Y.; Coop, M.R.; Tang, H.; Fan, Z. Effects of overconsolidation on the reactivated residual strength of remoulded deep-seated sliding zone soil in the Three Gorges Reservoir Region, China. Eng. Geol. 2022, 310, 106882. [Google Scholar] [CrossRef]
- Yang, Y.X.; Zhang, Y.; Cheng, Y.; Lei, Z.; Gao, X.; Huang, Y.; Ma, Y. Using one-dimensional convolutional neural networks and data augmentation to predict thermal production in geothermal fields. J. Clean. Prod. 2023, 387, 135879. [Google Scholar] [CrossRef]
- Liang, X.; Xu, T.; Chen, J.; Jiang, Z. A deep-learning based model for fracture network characterization constrained by induced micro-seismicity and tracer test data in enhanced geothermal system. Renew. Energy 2023, 216, 119046. [Google Scholar] [CrossRef]
- Shaheen, A.; Waheed, U.B.; Fehler, M.; Sokol, L.; Hanafy, S. GroningenNet: Deep learning for low-magnitude earthquake detection on a multi-level sensor network. Sensors 2021, 21, 8080. [Google Scholar] [CrossRef]
- Yin, X.X.; Jiang, C.S.; Yin, F.L.; Zhai, H.Y.; Zheng, Y.; Wu, H.D.; Niu, X.; Zhang, Y.; Jiang, C.; Li, J.W. Assessment and optimization of maximum magnitude forecasting models for induced seismicity in enhanced geothermal systems: The Gonghe EGS Project in Qinghai, China. Tectonophysics 2024, 886, 230438. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Preset Parameters | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault | 0 (absence) | 1 (presence) | ||||||||||
| In situ stress state | 1 (normal faulting stress state) | 0 (strike-slip faulting stress state) | −1 (reverse faulting stress state) | |||||||||
| Fracture dip angle | 0~90° | |||||||||||
| The angle between fracture and fault | 0~90° | |||||||||||
| Degree of fracture aggregation | 1 | 2 | 3 | 4 | ||||||||
| Fluid injection volume | 1~5 × 104 m3 | |||||||||||
| Distance to fault | 1~5 km | |||||||||||
| Maximum in situ stress | 80~160 MPa | |||||||||||
| Depth | 1~5 km | |||||||||||
| Number | Input Parameters | Output Parameters | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault | State of In Situ Stress | Fracture Dip Angle | The Angle Between Fracture and Fault | Degree of Fracture Aggregation | Fluid Injection Volume | Distance to Fault | Maximum In Situ Stress | Depth | Maximum Magnitude | Quantity of Seismicity | Distance of Seismicity | |
| 1 | 0 | 1 | 90° | 50° | 1 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.12 | 847 | 530 m |
| 2 | 1 | 0 | 90° | 50° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.22 | 735 | 682 m |
| 3 | 1 | −1 | 90° | 50° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.1 | 1292 | 1316 m |
| 4 | 1 | 1 | 90° | 50° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.23 | 64 | 148 m |
| 5 | 1 | 0 | 90° | 50° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.22 | 735 | 682 m |
| 6 | 1 | 0 | 0° | 90° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | −0.15 | 56 | 308 m |
| 7 | 1 | 0 | 30° | 90° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | −0.16 | 53 | 100 m |
| 8 | 1 | 0 | 60° | 90° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.16 | 320 | 402 m |
| 9 | 1 | 0 | 0° | 45° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.08 | 440 | 915 m |
| 10 | 1 | 0 | 30° | 45° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | −0.03 | 464 | 403 m |
| 11 | 1 | 0 | 60° | 45° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | −0.01 | 685 | 535 m |
| 12 | 1 | 0 | 0° | 0° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.02 | 1198 | 794 m |
| 13 | 1 | 0 | 30° | 0° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.23 | 523 | 459 m |
| 14 | 1 | 0 | 60° | 0° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.06 | 204 | 297 m |
| 15 | 1 | 0 | 90° | 50° | 1 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | −0.75 | 434 | 269 m |
| 16 | 1 | 0 | 90° | 50° | 2 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.03 | 339 | 505 m |
| 17 | 1 | 0 | 90° | 50° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.09 | 735 | 682 m |
| 18 | 1 | 0 | 90° | 50° | 4 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.22 | 64 | 304 m |
| 19 | 1 | 0 | 90° | 50° | 3 | 12,960 L | 0.759 km | 93.2 MPa | 2.9 km | 0.2193 | 253 | 201 m |
| 20 | 1 | 0 | 90° | 50° | 3 | 43,200 L | 1.78 km | 93.2 MPa | 2.9 km | 0.07 | 104 | 339 m |
| 21 | 1 | 0 | 90° | 50° | 3 | 43,200 L | 0.759 km | 93.2 MPa | 2.9 km | 0.18 | 387 | 492 m |
| 22 | 1 | 0 | 90° | 50° | 3 | 43,200 L | 0.759 km | 139 MPa | 2.9 km | 0.13 | 261 | 201 m |
| Parameters | Ranking of the Degree of Influence | The Corrected Weight Value |
|---|---|---|
| In situ stress state | 1 | 0.2 |
| Fault presence or absence | 2 | 0.18 |
| Depth | 3 | 0.16 |
| Degree of fracture aggregation | 4 | 0.13 |
| Maximum in situ stress | 5 | 0.11 |
| Distance to fault | 6 | 0.09 |
| Fluid injection volume | 7 | 0.07 |
| Fracture dip angle | 8 | 0.04 |
| The angle between fracture and fault | 9 | 0.02 |
| Fluid Injection Volume | Distance to Fault | Depth | In Situ Stress | Maximum Magnitude | Focal Mechanism | ||
|---|---|---|---|---|---|---|---|
| Magnitude | Direction | ||||||
| 1 | 0 | 66 km | 10 km | 158 MPa | 244° | 3.5 | Unknown |
| 2 | 0 | 172 km | 5.4 km | 86 MPa | 22° | 4.7 | Sinistral reverse |
| 3 | 0 | 168 km | 10 km | 129 MPa | 101° | 4.7 | Unknown |
| 4 | 0 | 172 km | 11.5 km | 182 MPa | 26° | 5.5 | Dextral reverse |
| 5 | 0 | 137 km | 10 km | 113 MPa | 119° | 3.5 | Unknown |
| 6 | 0 | 57 km | 8.8 km | 139 MPa | 73° | 4.6 | Dextral normal |
| 7 | 0 | 59.8 km | 13 km | 206 MPa | 29° | 5.4 | Dextral Strike-slip |
| 8 | 0 | 54.9 km | 10 km | 129 MPa | 49° | 4.9 | Unknown |
| 9 | 0 | 56 km | 10 km | 113 MPa | 214° | 4.7 | Unknown |
| 10 | 0 | 25 km | 10 km | 158 MPa | 225° | 4.8 | Unknown |
| 11 | 0 | 161 km | 10 km | 129 MPa | 43° | 4.4 | Sinistral normal |
| 12 | 9 × 102 m3 | 0.21 km | 5.49 km | 243 MPa | 75° | 5.5 | Reverse |
| 13 | 2 × 104 m3 | 0.34 km | 4.13 km | 91 MPa | 101° | 3.7 | Unknown |
| 14 | 4 × 104 m3 | 1.21 km | 4.98 km | 91.3 MPa | 175° | 2.9 | Unknown |
| 15 | 2 × 108 m3 | 0.58 km | 2.5 km | 72.3 MPa | 155° | 4.4 | Dextral |
| 16 | 1.1566 × 104 m3 | 1.35 km | 5 km | 115 MPa | 144° | 3.4 | Unknown |
| 17 | 1.36 × 1010 m3 | 6 km | 3.39 km | 98.3 MPa | 26° | 4.6 | Dextral normal |
| 18 | 4 × 103 m3 | 0.47 km | 9.1 km | 150 MPa | 166° | 1.2 | Unknown |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, K.; Zheng, Y.; Cheng, W.; Shan, Z.; Zhang, Y. Evaluation of Seismicity Induced by Geothermal Development Based on Artificial Neural Network. Energies 2025, 18, 4004. https://doi.org/10.3390/en18154004
Shan K, Zheng Y, Cheng W, Shan Z, Zhang Y. Evaluation of Seismicity Induced by Geothermal Development Based on Artificial Neural Network. Energies. 2025; 18(15):4004. https://doi.org/10.3390/en18154004
Chicago/Turabian StyleShan, Kun, Yanhao Zheng, Wanqiang Cheng, Zhigang Shan, and Yanjun Zhang. 2025. "Evaluation of Seismicity Induced by Geothermal Development Based on Artificial Neural Network" Energies 18, no. 15: 4004. https://doi.org/10.3390/en18154004
APA StyleShan, K., Zheng, Y., Cheng, W., Shan, Z., & Zhang, Y. (2025). Evaluation of Seismicity Induced by Geothermal Development Based on Artificial Neural Network. Energies, 18(15), 4004. https://doi.org/10.3390/en18154004