
Multi-Plane Virtual Vector-Based Anti-Disturbance Model Predictive Fault-Tolerant Control for Electric Agricultural Equipment Applications


Abstract
1. Introduction
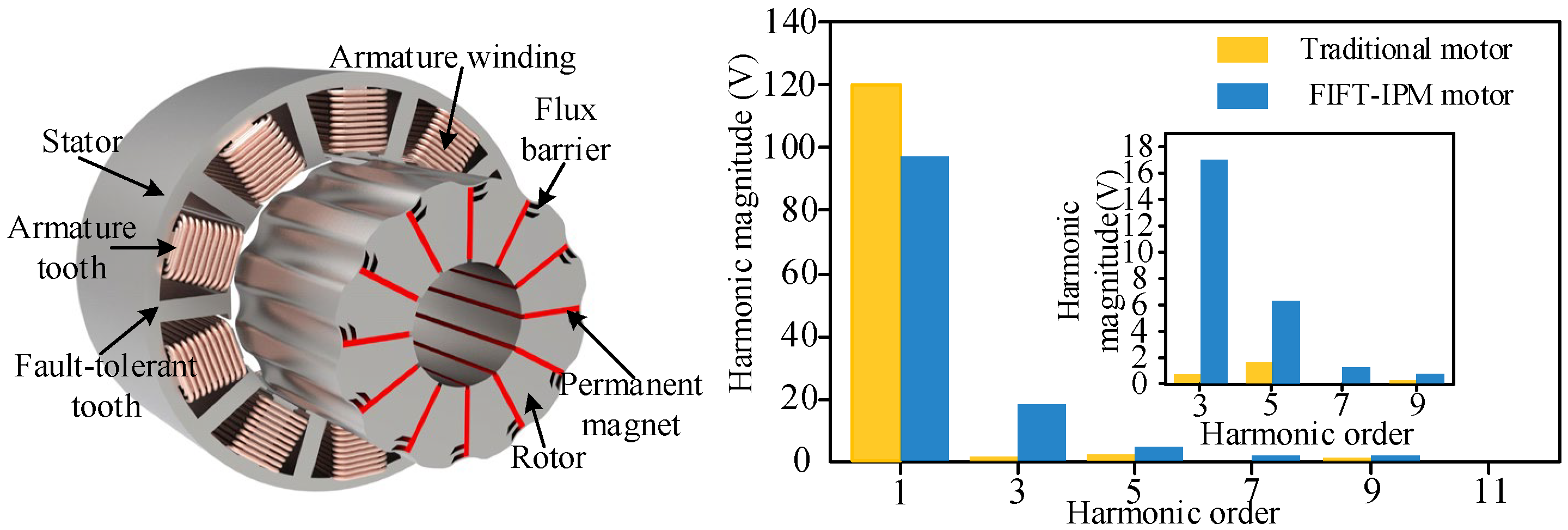
2. Motor Topology Structure and Characteristics
3. Multi-Plane Mathematical Model Under Open-Circuit Fault
4. Fault-Tolerant Control Strategy for Model Prediction of Multi-Plane Virtual Vector
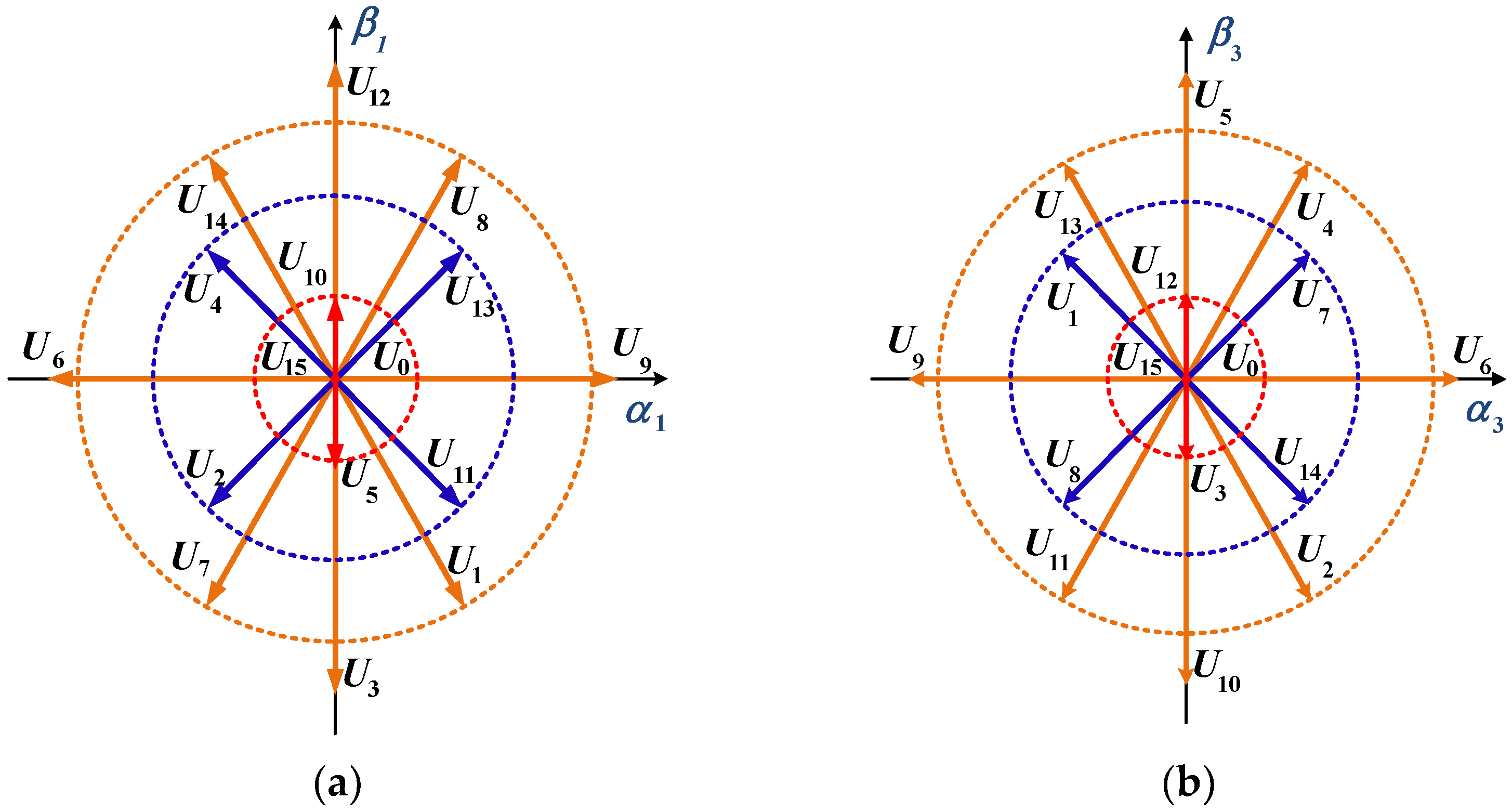
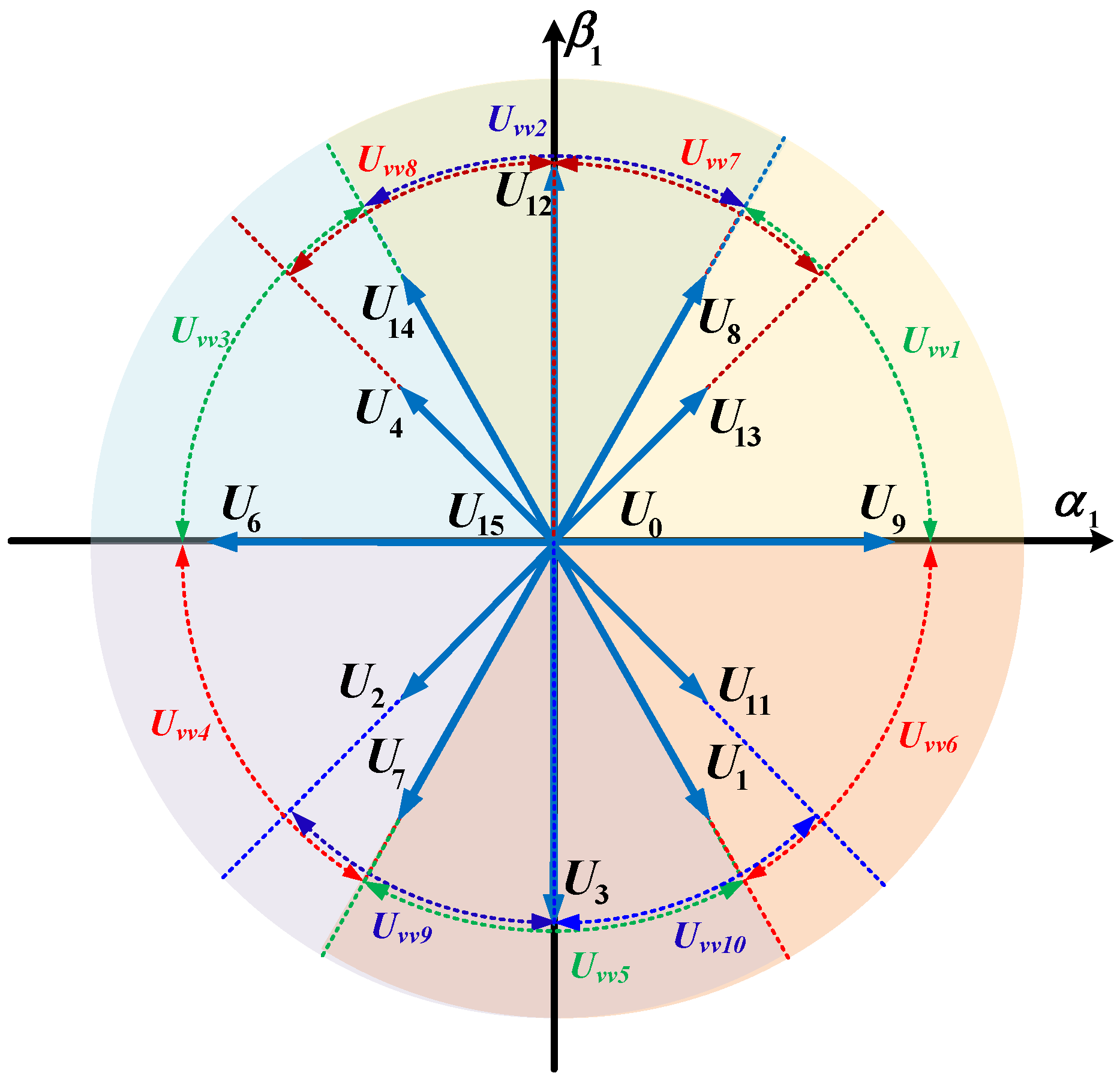
4.1. Virtual Vector Model Prediction Fault-Tolerant Control
4.2. Computational Optimization of Multi-Plane Virtual Vector Model Prediction Fault Tolerance Control
4.3. Calculation of Vector Action Time
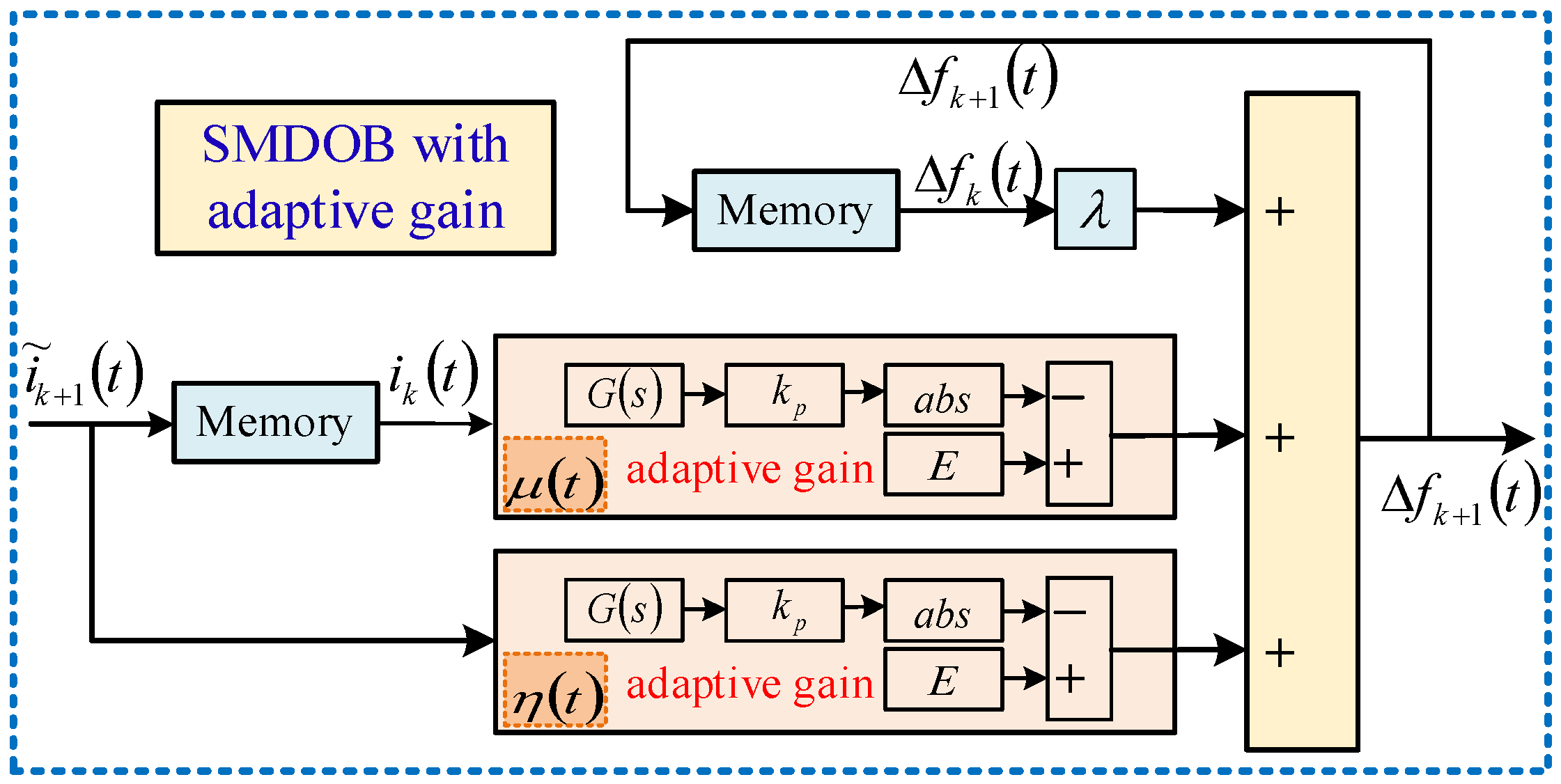
4.4. Sliding-Mode Disturbance Observer
5. Overall Control Strategy
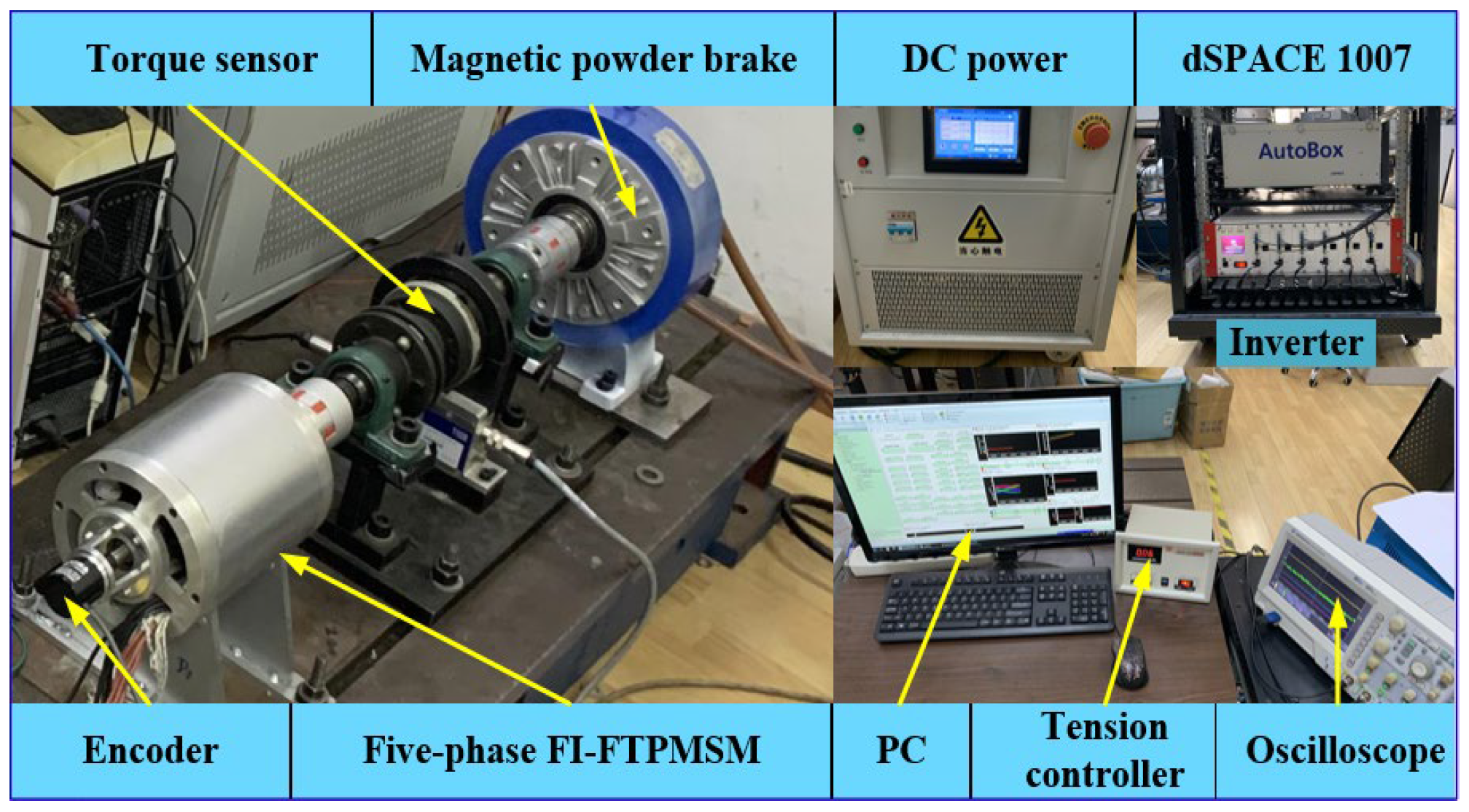
6. Experimental Verification
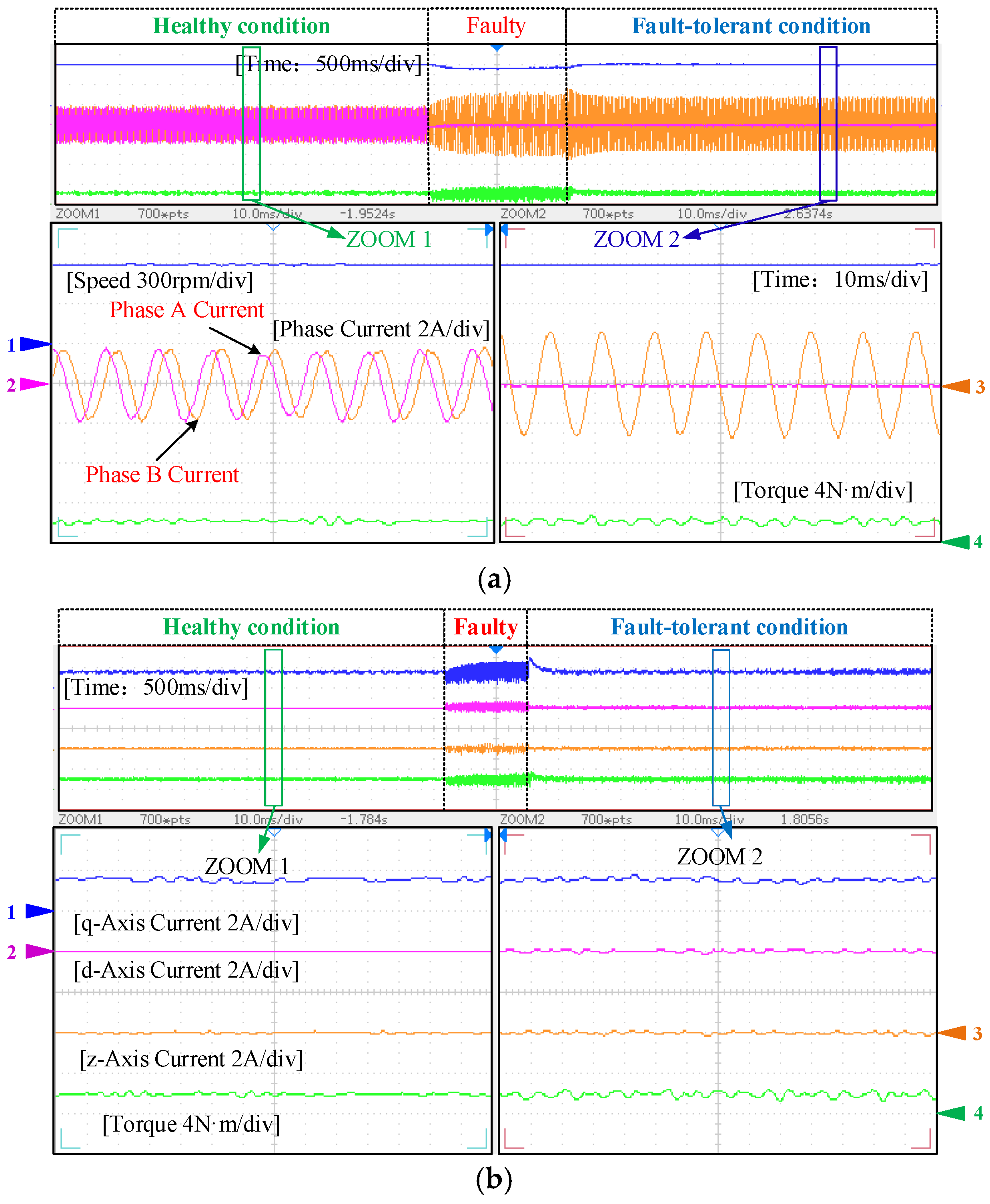
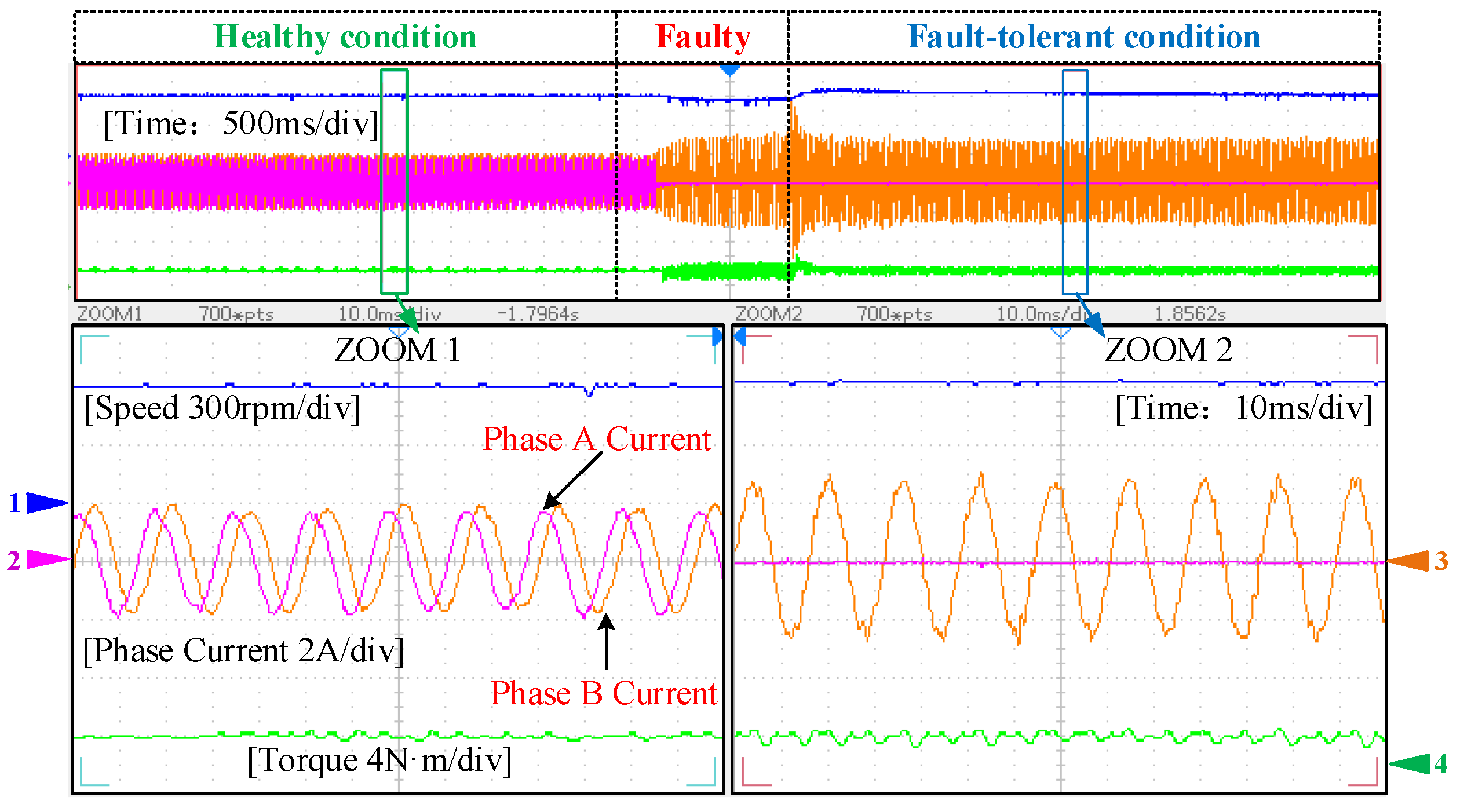
6.1. Fault-Tolerant Control Switching Experiment of Motor Drive System
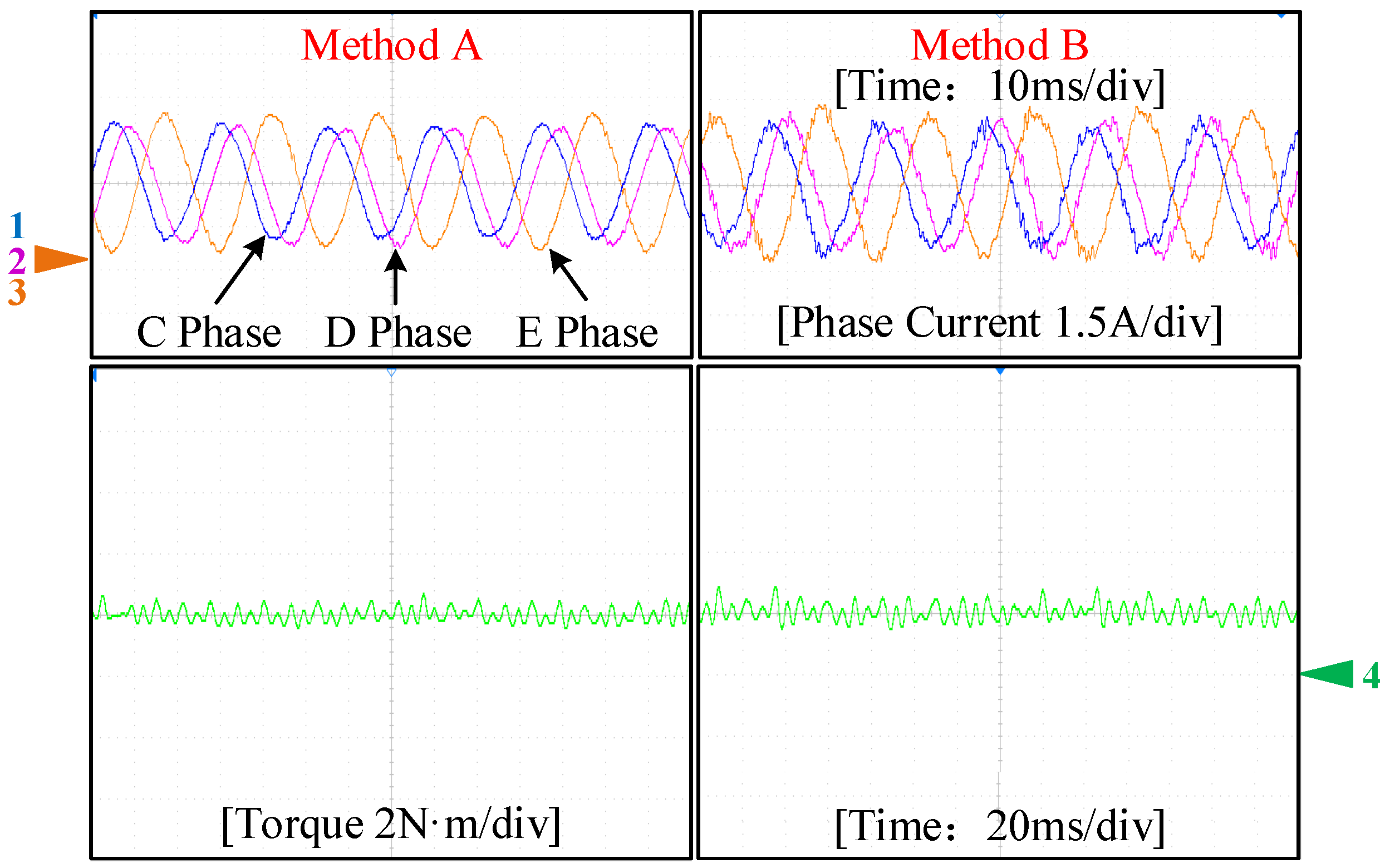
6.2. Steady State Performance Test of Motor Drive System
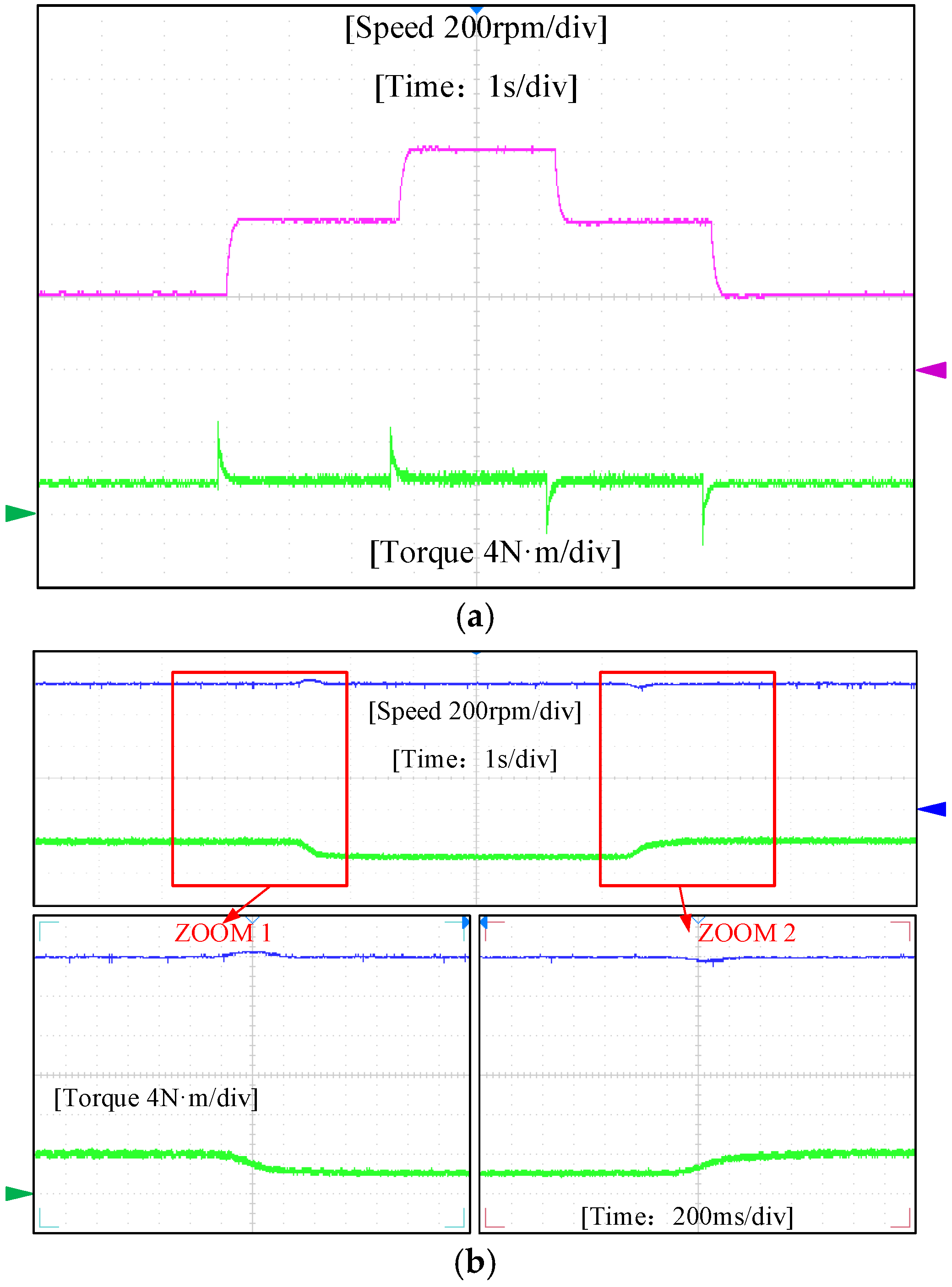
6.3. Dynamic Performance Test of Motor Drive System
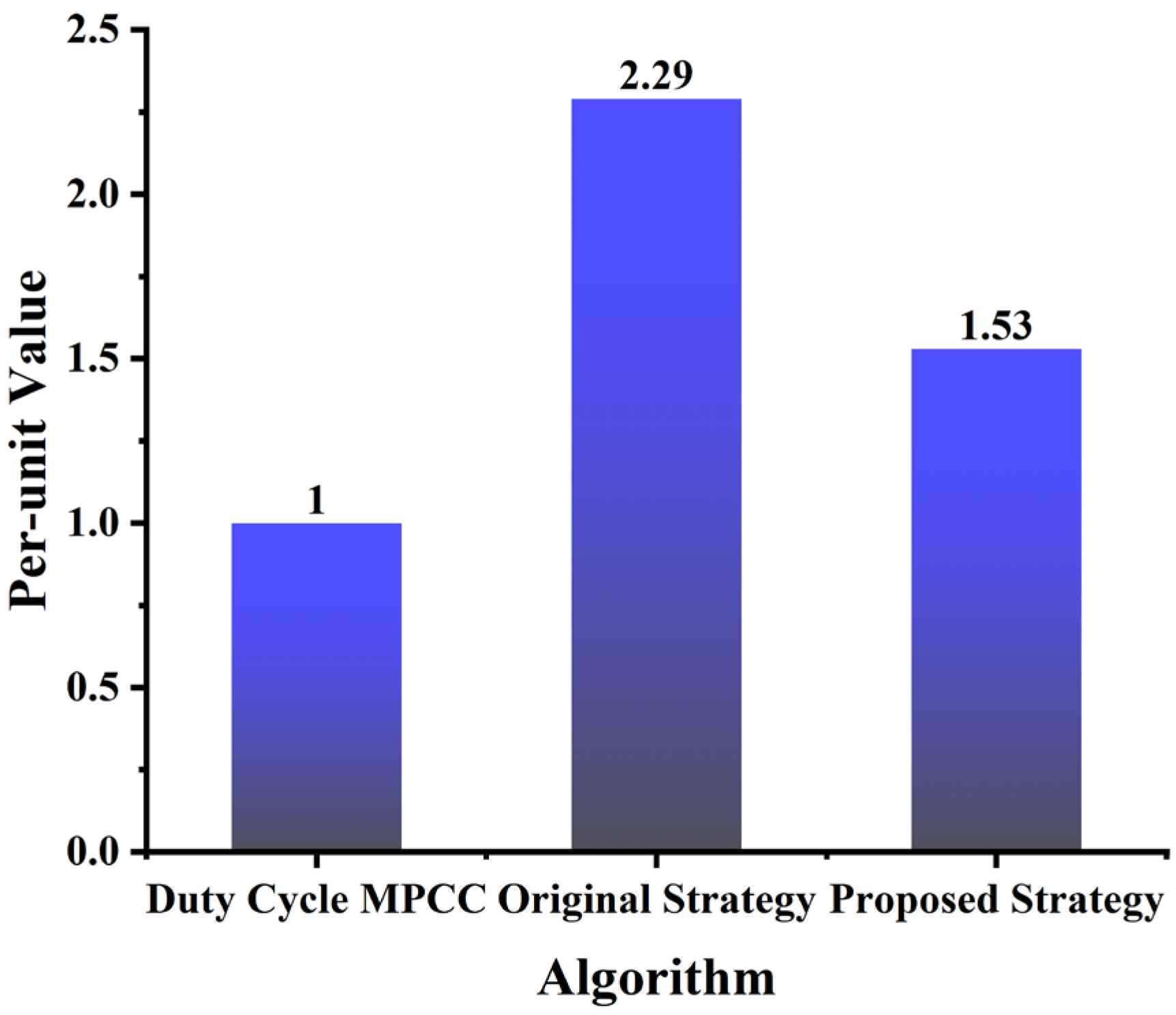
6.4. Analysis of Calculation Amount of Motor Drive System
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, Y.; Hao, S.; Guo, S.; Tang, Z.; Chen, S. Motor Torque Distribution Strategy for Different Tillage Modes of Agricultural Electric Tractors. Agriculture 2022, 12, 1373. [Google Scholar] [CrossRef]
- Zhu, Z.; Chai, X.; Xu, L.; Quan, L.; Yuan, C.; Tian, S. Design and performance of a distributed electric drive system for a series hybrid electric combine harvester. Biosyst. Eng. 2023, 236, 160–174. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture 2022, 12, 1986. [Google Scholar] [CrossRef]
- Han, J.; Wang, F. Design and Testing of a small orchard tractor driven by a power battery. Eng. Agrícola 2023, 43, e20220195. [Google Scholar]
- Zhu, Q.; Zhu, Z.; Zhang, H.; Gao, Y.; Chen, L. Design of an Electronically Controlled Fertilization System for an Air-Assisted Side-Deep Fertilization Machine. Agriculture 2023, 13, 2210. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Lv, L.; Shi, Y.; Yu, X. Study on Modeling Method of a Multi-Parameter Control System for Threshing and Cleaning Devices in the Grain Combine Harvester. Agriculture 2022, 12, 1483. [Google Scholar] [CrossRef]
- Li, H.; Chen, L.; Zhang, Z. A Study on the Utilization Rate and Influencing Factors of Small Agricultural Machinery: Evidence from 10 Hilly and Mountainous Provinces in China. Agriculture 2023, 13, 51. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S.; Shen, Y.; Li, C.; Zhang, Y.; Hussain, F. Model predictive control system based on direct yaw moment control for 4WID self-steering agriculture vehicle. Int. J. Agric. Biol. Eng. 2021, 14, 175–181. [Google Scholar] [CrossRef]
- Gao, Y.; Feng, K.; Yang, S.; Han, X.; Wei, X.; Zhu, Q.; Chen, L. Design and Experiment of an Unmanned Variable-Rate Ferti-lization Control System with Self-Calibration of Fertilizer Discharging Shaft Speed. Agronomy 2024, 14, 2336. [Google Scholar] [CrossRef]
- Yue, R.; Yao, M.; Zhang, T.; Shi, J.; Zhou, J.; Hu, J. Design and Experiment of Dual-Row Seedling Pick-Up Device for High-Speed Automatic Transplanting Machine. Agriculture 2024, 14, 942. [Google Scholar] [CrossRef]
- Shi, Q.; Liu, D.; Mao, H.; Shen, B.; Li, M. Wind-induced response of rice under the action of the downwash flow field of a multi-rotor UAV. Biosyst. Eng. 2021, 203, 60–69. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.W.; Xin, H. A state-of-the-art analysis of obstacle avoidance methods from the per-spective of an agricultural sprayer UAV’s operation scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive Sliding Mode Path Tracking Control of Unmanned Rice Transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Liu, W.; Zhou, J.; Zhang, T.; Zhang, P.; Yao, M.; Li, J.; Sun, Z.; Ma, G.; Chen, X.; Hu, J. Key Technologies in Intelligent Seeding Machinery for Cereals: Recent Advances and Future Perspectives. Agriculture 2025, 15, 8. [Google Scholar] [CrossRef]
- Yang, S.; Zhai, C.; Gao, Y.; Dou, H.; Zhao, X.; He, Y.; Wang, X. Planting Uniformity Performance of Motor-Driven Maize Precision Seeding Systems. Int. J. Agric. Biol. Eng. 2022, 15, 101–108. [Google Scholar] [CrossRef]
- Tang, L.; Wang, W.; Zhang, C.; Wang, Z.; Ge, Z.; Yuan, S. Linear Active Disturbance Rejection Control System for the Travel Speed of an Electric Reel Sprinkling Irrigation Machine. Agriculture 2024, 14, 1544. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, L.; Wang, R.; Xu, X.; Shen, Y.; Liu, Y. Modeling and test on height adjustment system of electrically-controlled air suspension for agricultural vehicles. Int. J. Agric. Biol. Eng. 2016, 9, 40–47. [Google Scholar]
- Zhu, Z.; Yang, Y.; Wang, D.; Cai, Y.; Lai, L. Energy Saving Performance of Agricultural Tractor Equipped with Mechan-ic-Electronic-Hydraulic Powertrain System. Agriculture 2022, 12, 436. [Google Scholar] [CrossRef]
- Liu, J.; Xia, C.; Jiang, D.; Sun, Y. Development and testing of the power transmission system of a crawler electric tractor for greenhouses. Appl. Eng. Agric. 2020, 36, 797–805. [Google Scholar] [CrossRef]
- Hu, J.; Zhao, X.; Liu, W.; Yao, M.; Zhao, J. Development of a Seeding Control Method Based on Seed Height in the Hopper of a Precision Wheat Drill. Appl. Eng. Agric. 2021, 37, 1131–1138. [Google Scholar] [CrossRef]
- Yuan, J.; Ji, W.; Feng, Q. Robots and Autonomous Machines for Sustainable Agriculture Production. Agriculture 2023, 13, 1340. [Google Scholar] [CrossRef]
- Shi, J.; Hu, J.; Li, J.; Liu, W.; Yue, R.; Zhang, T.; Yao, M. Design and Experiment of Planting Mechanism of Automatic Trans-planter for Densely Planted Vegetables. Agriculture 2024, 14, 1357. [Google Scholar] [CrossRef]
- Lu, E.; Xue, J.; Chen, T.; Jiang, S. Robust Trajectory Tracking Control of an Autonomous Tractor-Trailer Considering Model Parameter Uncertainties and Disturbances. Agriculture 2023, 13, 869. [Google Scholar] [CrossRef]
- Lu, E.; Ma, Z.; Li, Y.M.; Xu, L.Z.; Tang, Z. Adaptive backstepping control of tracked robot running trajectory based on real-time slip parameter estimation. Int. J. Agric. Biol. Eng. 2020, 13, 178–187. [Google Scholar] [CrossRef]
- Lu, E.; Xu L, Z.; Li Y, M.; Tang, Z.; Ma, Z. Modeling of working environment and coverage path planning method of combine harvesters. Int. J. Agric. Biol. Eng. 2020, 13, 132–137. [Google Scholar] [CrossRef]
- Yan, H.F.; Acquah, S.J.; Zhang, J.Y.; Wang, G.Q.; Zhang, C.; Darko, R.O. Overview of modelling techniques for greenhouse microclimate environment and evapotranspiration. Int. J. Agric. Biol. Eng. 2021, 14, 1–8. [Google Scholar] [CrossRef]
- Zhu, Y.; Cui, B.; Yu, Z.; Gao, Y.; Wei, X. Tillage Depth Detection and Control Based on Attitude Estimation and Online Cali-bration of Model Parameters. Agriculture 2024, 14, 2130. [Google Scholar] [CrossRef]
- Dai, D.; Chen, D.; Wang, S.; Li, S.; Mao, X.; Zhang, B.; Wang, Z.; Ma, Z. Compilation and Extrapolation of Load Spectrum of Tractor Ground Vibration Load Based on CEEMDAN-POT Model. Agriculture 2023, 13, 125. [Google Scholar] [CrossRef]
- Zhang, B.; Bai, T.; Wu, G.; Wang, H.; Zhu, Q.; Zhang, G.; Meng, Z.; Wen, C. Fatigue Analysis of Shovel Body Based on Tractor Subsoiling Operation Measured Data. Agriculture 2024, 14, 1604. [Google Scholar] [CrossRef]
- Yan, H.; Acquah, S.J.; Zhang, C.; Wang, G.; Huang, S.; Zhang, H.; Zhao, B.; Wu, H. Energy partitioning of greenhouse cucumber based on the application of Penman-Monteith and Bulk Transfer models. Agric. Water Manag. 2019, 217, 201–211. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Z.; Ding, S.; Xia, J.; Xing, G. Adaptive disturbance observer-based fixed time nonsingular terminal sliding mode control for path-tracking of unmanned agricultural tractors. Biosyst. Eng. 2024, 246, 96–109. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, B.; Pan, S.; Ye, Y.; Wang, E.; Mao, H. Task Allocation of Multi-Machine Collaborative Operation for Agricultural Machinery Based on the Improved Fireworks Algorithm. Agronomy 2024, 14, 710. [Google Scholar] [CrossRef]
- Li, J.; Wu, Z.; Li, M.; Shang, Z. Dynamic Measurement Method for Steering Wheel Angle of Autonomous Agricultural Vehicles. Agriculture 2024, 14, 1602. [Google Scholar] [CrossRef]
- Pei, Z.; Zhang, L.; Fu, H.; Wang, Y. New Fault-Tolerant Sensorless Control of FPFTPM Motor Based on Hybrid Adaptive Robust Observation for Electric Agricultural Equipment Applications. Energies 2025, 18, 1962. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, M.; Zhu, X.; Pei, Z.; Chen, X. Space Decoupling Sensorless Control of Five-Phase Flux-Intensifying PM Motor Based on AFCCF-SMO Considering Flux-Weakening Operation. IEEE. Trans. Ind. Electron. 2025, 72, 6865–6875. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, L.; Peng, Z.; Tan, F.; Xu, L. New Low-Noise Sensorless Control Strategy for PMSM Drives Based on Variable-Frequency Voltage Signal Injection. IET Electr. Power Appl. 2025, 19, e12538. [Google Scholar] [CrossRef]
- Wu, T.; Zhu, H.; Wu, X.; Huang, S.; Yu, X.; Tan, Z.; Gao, F.; Tong, X. Enhanced Sequential High-Frequency Voltage Injection Method for Low-Speed Sensorless Control of IPMSM. IEEE Trans. Power. Electron. 2025, 40, 10836–10845. [Google Scholar] [CrossRef]
- Marcos-Andrade, D.; Beltran-Carbajal, F.; Rivas-Cambero, I.; Yañez-Badillo, H.; Favela-Contreras, A.; Rosas-Caro, J.C. Sliding Mode Speed Control in Synchronous Motors for Agriculture Machinery: A Chattering Suppression Approach. Agriculture 2024, 14, 737. [Google Scholar] [CrossRef]
- Zhang, L.; Deng, S.; Zhu, X.; Xiang, Z. New Flux Intensifying Technique for Five-Phase Fault-Tolerant Interior Permanent Magnet Motors Under Multiple Sensorless Operation. IEEE. Trans. Ind. Electron. 2024, 71, 13801–13811. [Google Scholar] [CrossRef]
- Zhang, L.; Li, X.; Zhu, X.; Zhang, C. Design and Optimization of a Five-Phase Reverse-Salient Fault-Tolerant Permanent Magnet Motor for Electric Vehicles. IEEE Trans. Ind. Electron. 2025, 72, 6762–6774. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, X.; Zhu, X.; Chen, X.; Chen, C. Extended Multioperating Mode Control Strategy for Five-Phase Flux-Intensifying Interior Permanent Magnet Motor Based on VSI-MTPA and FW Control. IEEE Trans. Transp. Electrif. 2025, 11, 1518–1528. [Google Scholar] [CrossRef]
- Li, T.; Sun, X.; Lei, G.; Guo, Y.; Yang, Z.; Zhu, J. Finite-Control-Set Model Predictive Control of Permanent Magnet Synchronous Motor Drive Systems—An Overview. IEEE-CAA J. Autom. Sin. 2022, 9, 2087–2105. [Google Scholar] [CrossRef]
- Dawood, A.; Ismeil, M.A.; Hussein, H.S.; Hasaneen, B.M.; Abdel-Aziz, A.M. An Efficient Protection Scheme Against Single-Phasing Fault for Three-Phase Induction Motor. IEEE Access 2024, 12, 6298–6317. [Google Scholar] [CrossRef]
- Li, B.; Lin, H. A novel quick startup control scheme for interior permanent magnet synchronous motor based on optimal voltage vector. In Proceedings of the 2010 2nd International Asia Conference on Informatics in Control, Automation and Robotics (CAR 2010), Wuhan, China, 6–7 March 2010; pp. 104–107. [Google Scholar]
- Zhu, C.; Wang, H.; Liu, W.; Li, H.; Xiao, Z. Torque Ripple Suppression method of Doubly Salient Electro-Magnetic Machine Based on Direct Instantaneous Torque Control. In Proceedings of the 2022 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 29 November–2 December 2022; pp. 1–6. [Google Scholar]
- Wei, Z.; Jiang, X.; Yang, S.; Zhang, X.; Cai, Y.; Wang, S. Research on Fault-Tolerant Control Strategy of Fault-Tolerant Permanent Magnet Motor Based on Cascaded Model Prediction Algorithm. In Proceedings of the 2022 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 29 November–2 December 2022; pp. 1–6. [Google Scholar]
- Huang, W.; Hua, W.; Chen, F.; Yin, F.; Qi, J. Model predictive current control of open-circuit fault-tolerant five-phase flux-switching permanent magnet motor drives. JESTPE 2018, 6, 1840–1849. [Google Scholar] [CrossRef]
- Liu, G.; Song, C.; Chen, Q. FCS-MPC-based fault-tolerant control of five-phase IPMSM for MTPA operation. IEEE Trans. Power Electron. 2020, 35, 2882–2894. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Qi, J.; Zhu, J. Performance improvement of model predictive current control of fault-tolerant five-phase flux-switching permanent magnet motor drive. IEEE Trans. Ind. Appl. 2019, 55, 6001–6010. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.; He, Y.; Cheng, Y.; Saeed, S.; Zhu, J. Enhanced fault-tolerant model predictive current control for a five-phase PM motor with continued modulation. IEEE Trans. Power Electron. 2021, 36, 3236–3246. [Google Scholar] [CrossRef]
- Saeed, S.; Zhao, W.; Wang, H.; Tao, T.; Khan, F. Fault-tolerant deadbeat model predictive current control for a five-phase PMSM with improved SVPWM. Chin. J. Electr. Eng. 2021, 7, 111–123. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.; Du, Y.; Cheng, Y.; Zhu, J. Simplified fault-tolerant model predictive control for a five-phase permanent-magnet motor with reduced computation burden. IEEE Trans. Power Electron. 2020, 35, 3850–3858. [Google Scholar] [CrossRef]
- Wei, Y.; Qiao, M.; Zhu, P. Fault-Tolerant Operation of Five-Phase Permanent Magnet Synchronous Motor with Independent Phase Driving Control. CES TEMS 2022, 6, 105–110. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, J.; Chen, C.; Tian, X.; Liu, G. Disturbance-observer-based direct torque control of five-phase permanent magnet motor under open-circuit and short-circuit faults. IEEE Trans. Ind. Electron. 2021, 68, 11907–11917. [Google Scholar] [CrossRef]
- Liu, J.; Cao, S.; Yi, Y.; Fang, Y. Adaptive control for permanent magnet synchronous motor based on disturbance observer. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 3533–3537. [Google Scholar]
- Lee, W.; Min, S.G.; Sarlioglu, B. Fault-tolerant operation of six-phase permanent magnet motor drive with open-circuit failures. IEEE Trans. Transp. Electrif. 2024, 10, 5910–5920. [Google Scholar] [CrossRef]
- Zhang, L.; Dong, C.; Zhu, X.; Chen, X.; Pei, Z. A Fault-Tolerant MTPA Control Strategy of Five-Phase Flux-Intensifying Fault-Tolerant Permanent-Magnet Motor With Sliding-Mode Disturbance Observer Under Open-Circuit and Short-Circuit Faults. IEEE. Trans. Ind. Electron. 2024, 71, 13650–13658. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Fundamental flux linkage | 0.103 Wb | 3rd harmonic flux linkage | 0.006 Wb |
| Fundamental d-axis inductance | 17.29 mH | Fundamental q-axis inductance | 12.60 mH |
| 3rd d-axis inductance | 12.83 mH | 3rd q-axis inductance | 12.81 mH |
| Polar of poles | 6 | Rated speed | 1200 rpm |
| Rated current | 5.98 A | Rated torque | 12 N·m |
| Rated output power | 2 kW | Resistance | 0.69 Ω |
| Virtual Vector | Basic Vector I | Basic Vector II | Basic Vector III | Basic Vector IV |
|---|---|---|---|---|
| Uvv1 | U9 (1001) | U13 (1101) | U8 (1000) | U0,15 |
| Uvv2 | U8 (1000) | U12 (1100) | U14 (1110) | U0,15 |
| Uvv3 | U14 (1110) | U4 (0100) | U6 (0110) | U0,15 |
| Uvv4 | U6 (0110) | U2 (0010) | U7 (0111) | U0,15 |
| Uvv5 | U7 (0111) | U3 (0011) | U1 (0001) | U0,15 |
| Uvv6 | U1 (0001) | U11 (1011) | U9(1001) | U0,15 |
| Uα1 | Uβ1 | Ergodic Quadrant | Contained Virtual Vectors |
|---|---|---|---|
| ≥0 | >0 | I | Uvv1, Uvv7, Uvv2 |
| <0 | ≥0 | II | Uvv3, Uvv2, Uvv8 |
| ≤0 | <0 | III | Uvv4, Uvv5, Uvv9 |
| >0 | ≤0 | IV | Uvv10, Uvv6, Uvv5 |
| Virtual Vector | Basic Vector I | Basic Vector II | Basic Vector III | Basic Vector IV |
|---|---|---|---|---|
| Uvv7 | U13 (1101) | U8 (1000) | U12 (1100) | U0,15 |
| Uvv8 | U12 (1100) | U14 (1110) | U4 (0100) | U0,15 |
| Uvv9 | U2 (0010) | U7 (0111) | U3 (0011) | U0,15 |
| Uvv10 | U3 (0011) | U1 (0001) | U11 (1011) | U0,15 |
| Speed (r/min)/ Experimental Load (N·m) | Fault-Tolerant Strategy | Current Distortion Rate (%) | Torque Ripple (%) | ||
|---|---|---|---|---|---|
| C | D | E | |||
| 200/1.831 | Method A | 2.90 | 3.74 | 4.45 | 34.95 |
| 200/1.792 | Method B | 10.51 | 10.06 | 8.76 | 36.71 |
| 400/1.984 | Method A | 4.63 | 3.52 | 4.83 | 36.29 |
| 400/2.212 | Method B | 10.41 | 9.48 | 8.35 | 43.40 |
| 600/2.198 | Method A | 6.50 | 4.15 | 5.31 | 40.03 |
| 600/2.317 | Method B | 11.89 | 10.04 | 9.83 | 45.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Xu, K.; Zhang, L.; Liu, Z.; Wang, Z.; Fu, H. Multi-Plane Virtual Vector-Based Anti-Disturbance Model Predictive Fault-Tolerant Control for Electric Agricultural Equipment Applications. Energies 2025, 18, 3857. https://doi.org/10.3390/en18143857
Cao H, Xu K, Zhang L, Liu Z, Wang Z, Fu H. Multi-Plane Virtual Vector-Based Anti-Disturbance Model Predictive Fault-Tolerant Control for Electric Agricultural Equipment Applications. Energies. 2025; 18(14):3857. https://doi.org/10.3390/en18143857
Chicago/Turabian StyleCao, Hengrui, Konghao Xu, Li Zhang, Zhongqiu Liu, Ziyang Wang, and Haijun Fu. 2025. "Multi-Plane Virtual Vector-Based Anti-Disturbance Model Predictive Fault-Tolerant Control for Electric Agricultural Equipment Applications" Energies 18, no. 14: 3857. https://doi.org/10.3390/en18143857
APA StyleCao, H., Xu, K., Zhang, L., Liu, Z., Wang, Z., & Fu, H. (2025). Multi-Plane Virtual Vector-Based Anti-Disturbance Model Predictive Fault-Tolerant Control for Electric Agricultural Equipment Applications. Energies, 18(14), 3857. https://doi.org/10.3390/en18143857