

Application of Twisting Controller and Modified Pufferfish Optimization Algorithm for Power Management in a Solar PV System with Electric-Vehicle and Load-Demand Integration

 , ,
, ,  , , , and
, , , and
Abstract
1. Introduction
- The study introduces TSMC, a hybrid control system that integrates TSMC and MPOA for optimal and stable power regulation in grid-integrated PV systems with EV applications.
- The TSMC guarantees resilience to external disruptions and system uncertainty. It provides both voltage and current tracking with quick, finite-time convergence. This is enhanced by MPOA, which optimizes TSMC settings to minimize transient and steady-state faults and increase control precision.
2. Related Works
3. Proposed Methodology
3.1. PV System
- —output energy of PV;
- —irradiance ;
- —PV efficiency;
- —factor that reduces efficiency;
- —entire installed panel’s area.
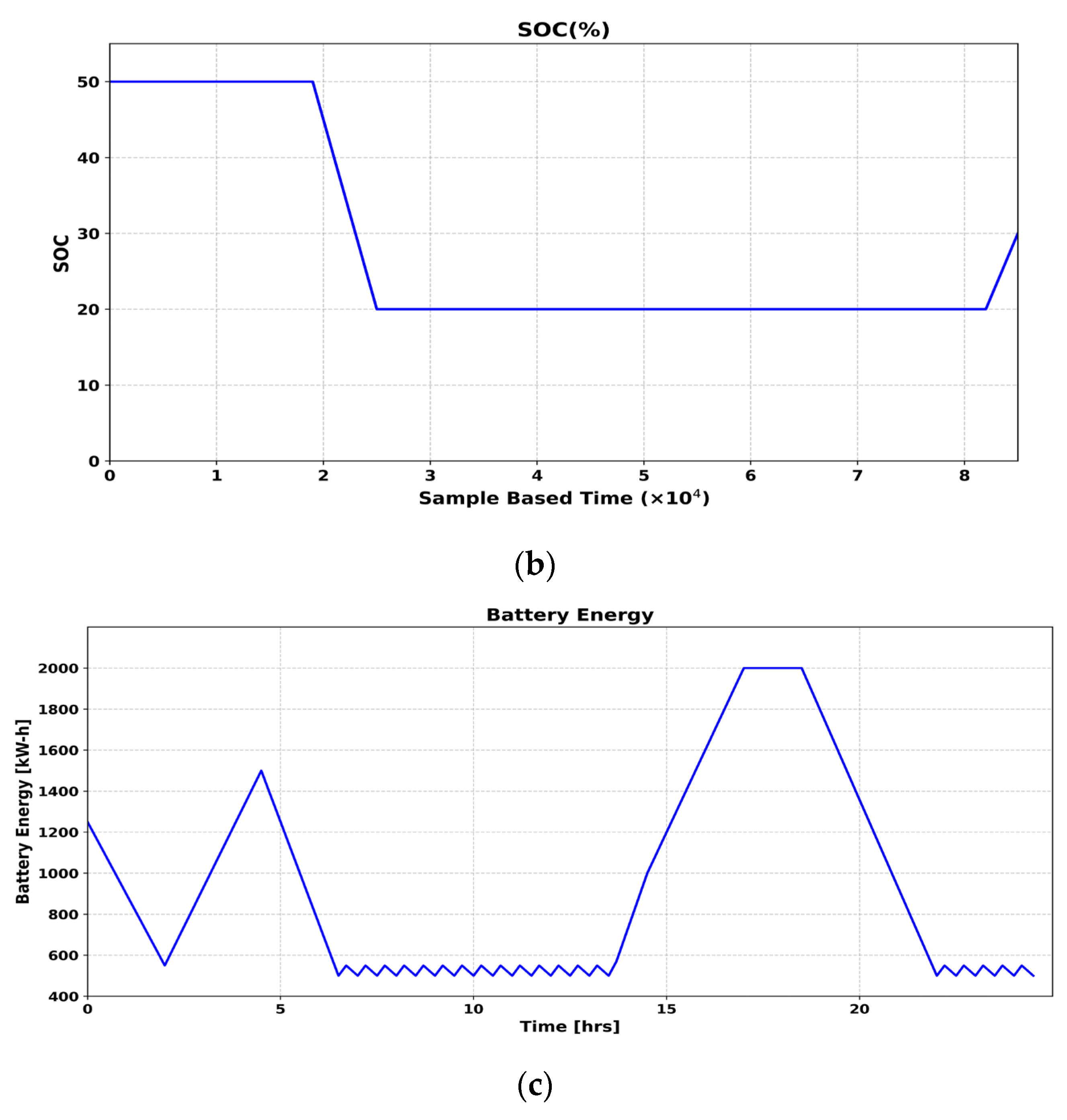
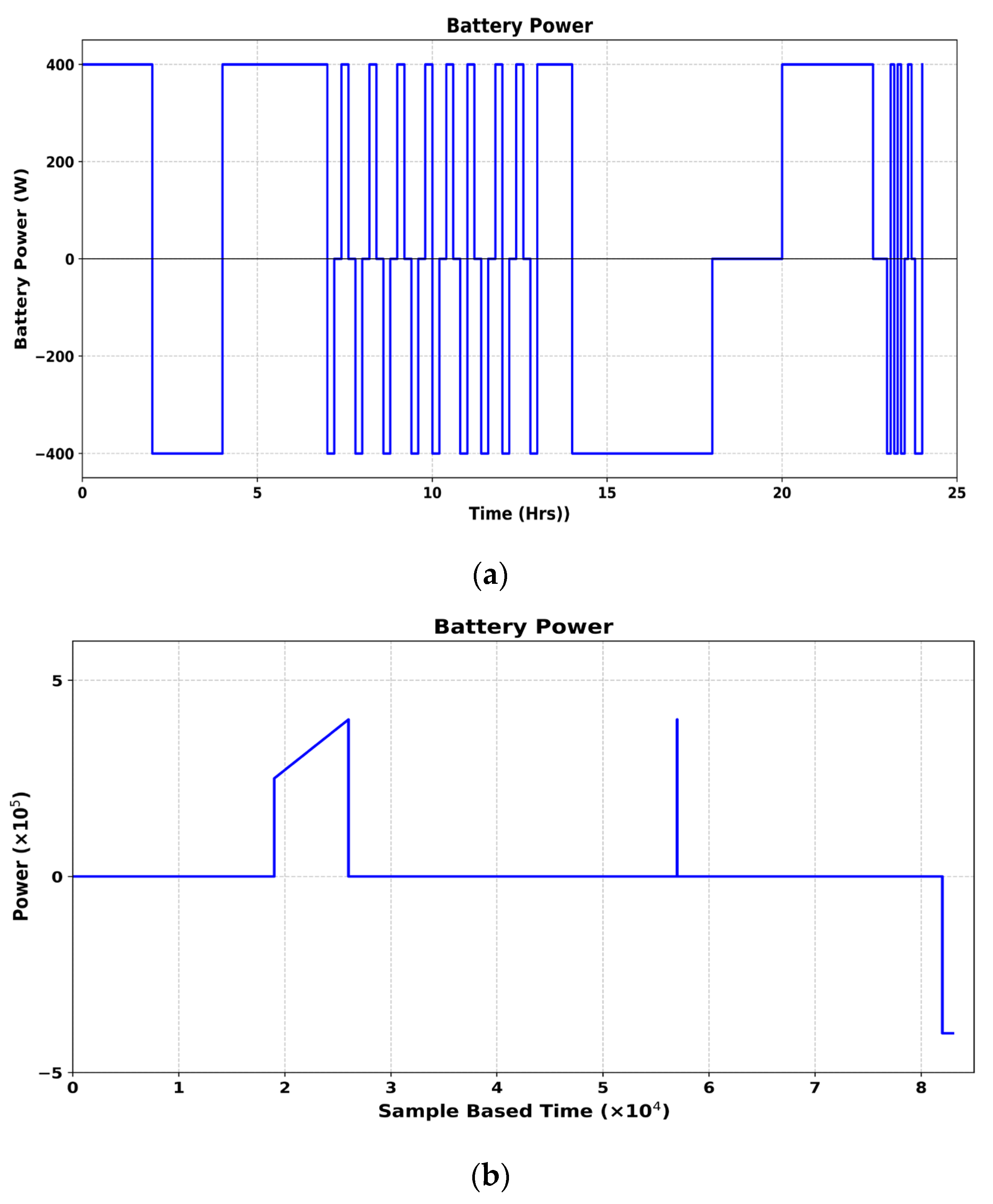
3.2. Battery Bank System
3.3. Electrical Vehicle
3.4. Mathematical Modeling of the Inverter
3.5. Mathematical Modeling of the Grid
4. The Intelligent Power Management Controller Is Achieved by Using TSMC with MPOA
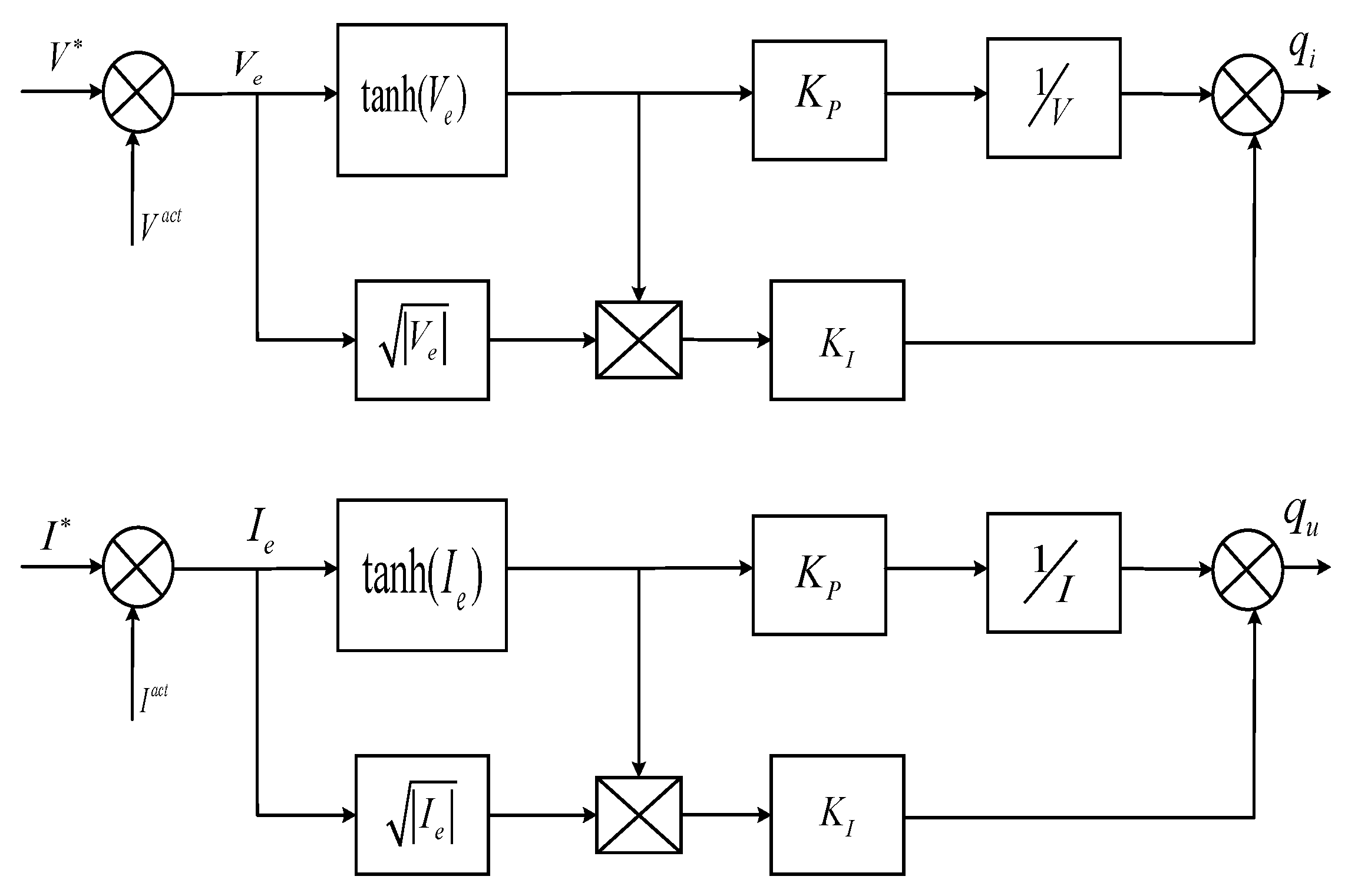
4.1. Design of TSMC Controller
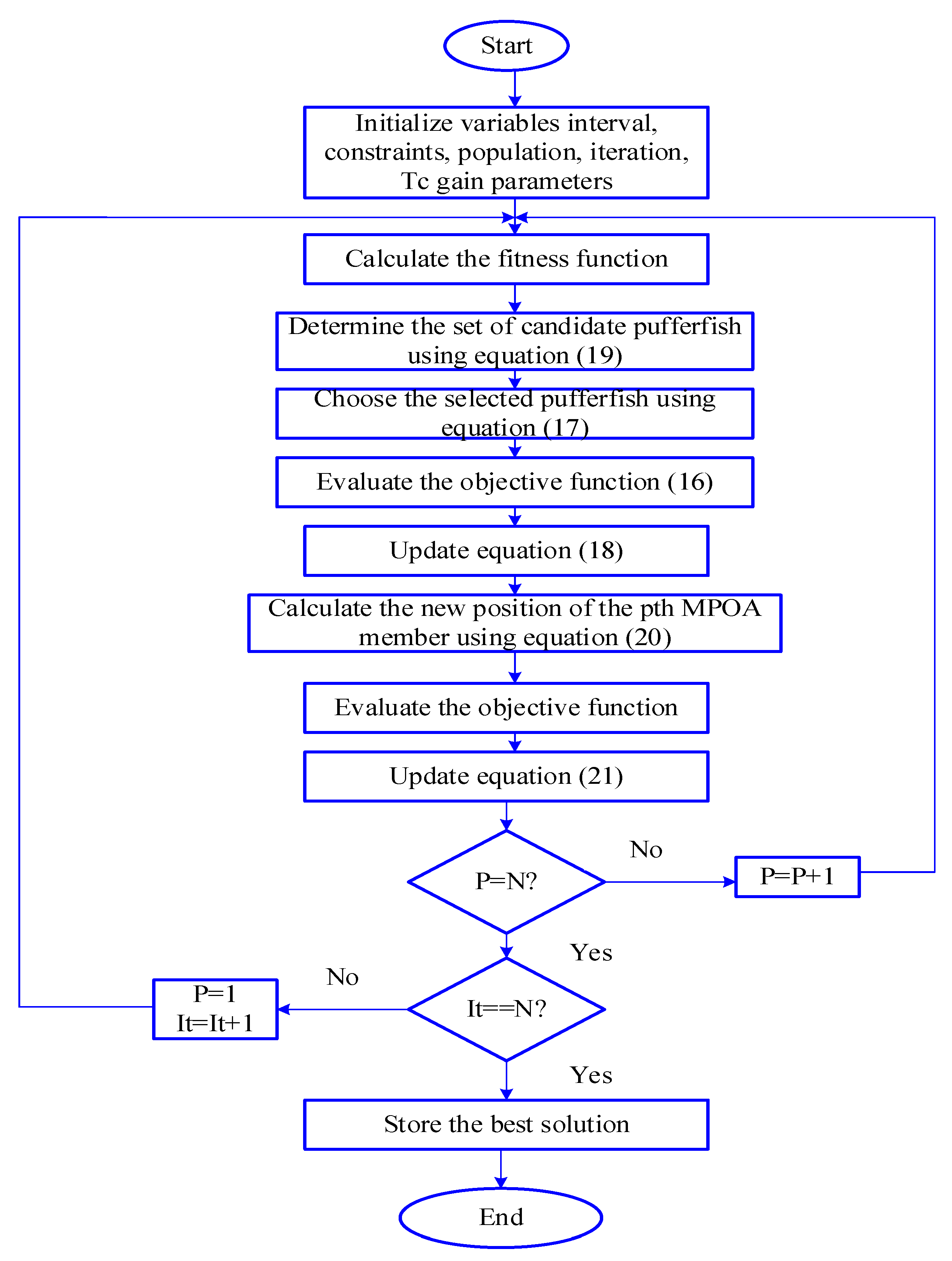
4.2. Optimization of Gain Parameter for Power Management Utilizing MPOA
- Step 1: Initialization
- Step 2: Fitness Function
- Step 3: Predator Attack on Pufferfish during the Exploration Stage
- Step 4: Pufferfish’s Defense Mechanism (Exploitation Phase) against Predators
- Step 5: Repetition Process
5. Results and Discussion
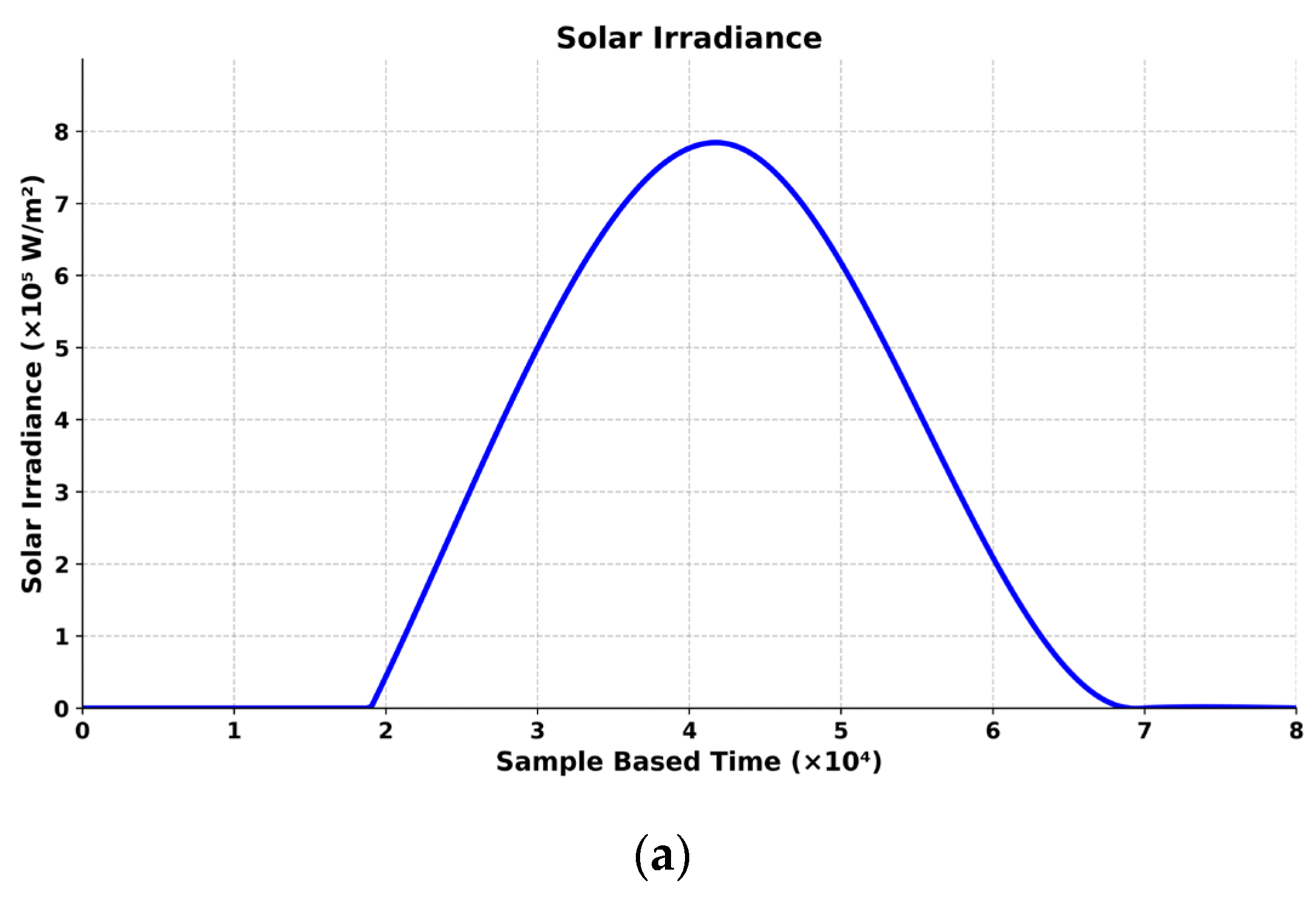
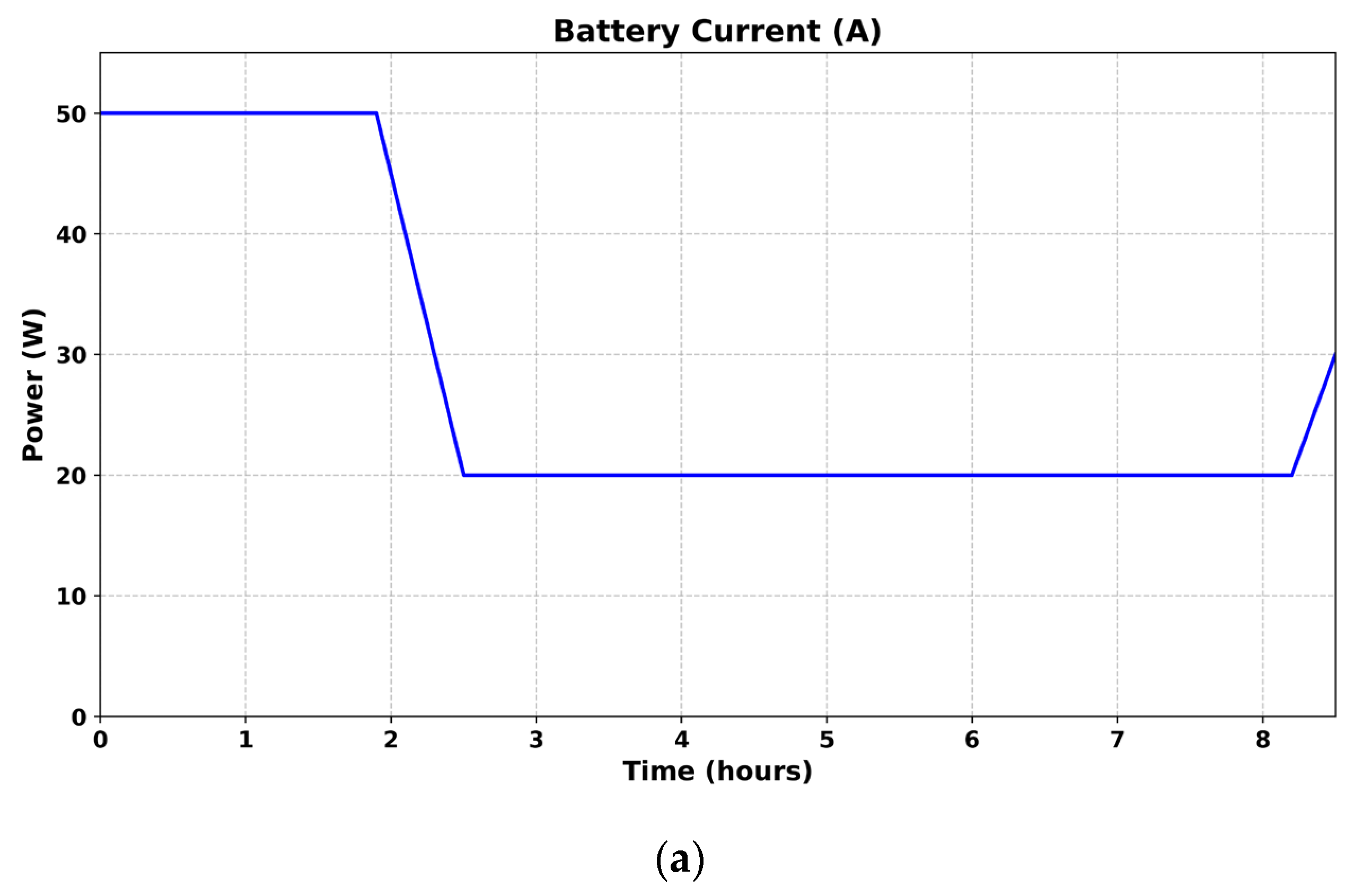
5.1. Performance Analysis of Proposed Power Management Controller Using MPOA Method
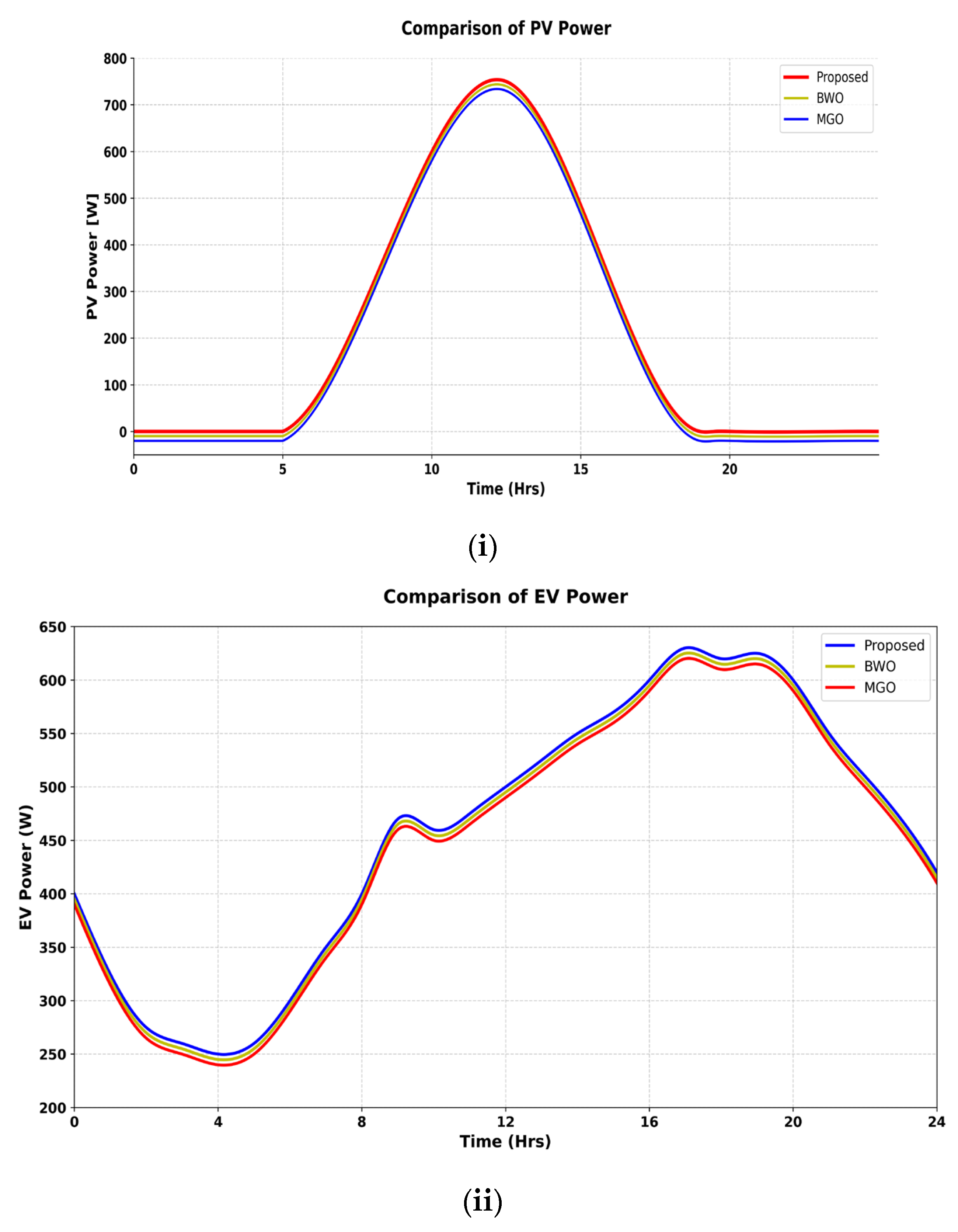
5.2. Comparison Analysis
6. Conclusions
7. Limitations and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PV | photovoltaic |
| EV | electric vehicle |
| IPMC | intelligent power management controller |
| TSMC | twisting sliding-mode controller |
| MPOA | Modified Pufferfish Optimization Algorithm |
| SOC | state of charge |
| GA | genetic algorithm |
| ANN | artificial neural network |
| SMC | sliding-mode controller |
| MPPT | maximum power point tracking |
| BWO | Beluga Whale Optimization |
| MGO | Mountain Gazelle Optimizer |
| CVaR | Conditional Value at Risk |
| NB | Nash bargaining |
| TPCA-ADMM | Three-Stage Predictor-Corrected Accelerated ADMM |
| ADMM | Alternating-Direction Method of Multipliers |
| EMS | energy management system |
| V2G | vehicle-to-grid |
| CCCV | Constant Current–Constant Voltage |
| SRF-PLL | synchronous reference frame phase-locked loop |
| LVRT | low-voltage ride through |
References
- Amir, M.; Zaheeruddin; Haque, A.; Bakhsh, F.I.; Kurukuru, V.S.B.; Sedighizadeh, M. Intelligent Energy Management Scheme-Based Coordinated Control for Reducing Peak Load in Grid-Connected Photovoltaic-Powered Electric Vehicle Charging Stations. IET Gener. Transm. Distrib. 2024, 18, 1205–1222. [Google Scholar] [CrossRef]
- Mohan, H.M.; Dash, S.K. Renewable Energy-Based DC Microgrid with Hybrid Energy Management System Supporting Electric Vehicle Charging System. Systems 2023, 11, 273. [Google Scholar] [CrossRef]
- Singh, B.; Kumar, A. Optimal Energy Management and Feasibility Analysis of Hybrid Renewable Energy Sources with BESS and Impact of Electric Vehicle Load with Demand Response Program. Energy 2023, 278, 127867. [Google Scholar] [CrossRef]
- Karmaker, A.K.; Hossain, A.; Pota, H.R.; Onen, A.; Jung, J. Energy Management System for Hybrid Renewable Energy-Based Electric Vehicle Charging Station. IEEE Access 2023, 11, 27793–27805. [Google Scholar] [CrossRef]
- Huy, T.H.B.; Dinh, H.T.; Kim, D. Multi-Objective Framework for a Home Energy Management System with the Integration of Solar Energy and an Electric Vehicle Using an Augmented ε-Constraint Method and Lexicographic Optimization. Sustain. Cities Soc. 2023, 88, 104289. [Google Scholar] [CrossRef]
- Das, N.; Haque, A.; Zaman, H.; Morsalin, S.; Islam, S. Domestic Load Management with Coordinated Photovoltaics, Battery Storage and Electric Vehicle Operation. IEEE Access 2023, 11, 12075–12087. [Google Scholar] [CrossRef]
- Rekioua, D. Energy Storage Systems for Photovoltaic and Wind Systems: A Review. Energies 2023, 16, 3893. [Google Scholar] [CrossRef]
- Hai, T.; Zhou, J.; Rezvani, A.; Le, B.N.; Oikawa, H. Optimal Energy Management Strategy for a Renewable Based Microgrid with Electric Vehicles and Demand Response Program. Electr. Power Syst. Res. 2023, 221, 109370. [Google Scholar] [CrossRef]
- Huy, T.H.B.; Dinh, H.T.; Vo, D.N.; Kim, D. Real-Time Energy Scheduling for Home Energy Management Systems with an Energy Storage System and Electric Vehicle Based on a Supervised-Learning-Based Strategy. Energy Convers. Manag. 2023, 292, 117340. [Google Scholar] [CrossRef]
- Boynuegri, A.R.; Tekgun, B. Real-Time Energy Management in an Off-Grid Smart Home: Flexible Demand Side Control with Electric Vehicle and Green Hydrogen Production. Int. J. Hydrogen Energy 2023, 48, 23146–23155. [Google Scholar] [CrossRef]
- Fathy, A. Bald Eagle Search Optimizer-Based Energy Management Strategy for Microgrid with Renewable Sources and Electric Vehicles. Appl. Energy 2023, 334, 120688. [Google Scholar] [CrossRef]
- Singh, A.K.; Tariq, T.; Ahmer, M.F.; Sharma, G.; Bokoro, P.N.; Shongwe, T. Intelligent Control of Irrigation Systems Using Fuzzy Logic Controller. Energies 2022, 15, 7199. [Google Scholar] [CrossRef]
- Ameur, A.; Berrada, A.; Emrani, A. Intelligent Energy Management System for Smart Home with Grid-Connected Hybrid Photovoltaic/Gravity Energy Storage System. J. Energy Storage 2023, 72, 108525. [Google Scholar] [CrossRef]
- Beheshtikhoo, A.; Pourgholi, M.; Khazaee, I. Design of Type-2 Fuzzy Logic Controller in a Smart Home Energy Management System with a Combination of Renewable Energy and an Electric Vehicle. J. Build. Eng. 2023, 68, 106097. [Google Scholar] [CrossRef]
- Yan, Z.; Duan, X.; Chang, Y.; Xu, Z.; Sobhani, B. Optimal Energy Management in Smart Buildings with Electric Vehicles Based on Economic and Risk Aspects Using Developed Whale Optimization Algorithm. J. Clean. Prod. 2023, 415, 137710. [Google Scholar] [CrossRef]
- Al Essa, M.J.M. Power Management of PEV Using Linear Programming with Solar Panels and Wind Turbines in Smart Grids. Electr. Eng. 2023, 105, 1761–1773. [Google Scholar] [CrossRef]
- Meenalochini, P.; Priya, R.A.; Pugalenthi, R.; Jagadeeshwaran, A. Energy Management of Grid Connected PV with Efficient Inverter Based Wireless Electric Vehicle Battery Charger: A Hybrid CSA-QNN Technique. J. Energy Storage 2024, 80, 110255. [Google Scholar] [CrossRef]
- Sathyan, S.; Pandi, V.R.; Antony, A.; Salkuti, S.R.; Sreekumar, P. ANN-Based Energy Management System for PV-Powered EV Charging Station with Battery Backup and Vehicle to Grid Support. Int. J. Green Energy 2024, 21, 1279–1294. [Google Scholar] [CrossRef]
- Nouri, A.; Lachheb, A.; El Amraoui, L. Optimizing Efficiency of Vehicle-to-Grid System with Intelligent Management and ANN-PSO Algorithm for Battery Electric Vehicles. Electr. Power Syst. Res. 2024, 226, 109936. [Google Scholar] [CrossRef]
- Li, B.; Li, Z.; He, D. Research and Optimization of Energy Management System for Photovoltaic Vehicles. Energy 2024, 289, 129776. [Google Scholar] [CrossRef]
- Aldbaiat, B.; Nour, M.; Radwan, E.; Awada, E. Grid-Connected PV System with Reactive Power Management and an Optimized SRF-PLL Using Genetic Algorithm. Energies 2022, 15, 2177. [Google Scholar] [CrossRef]
- Rajaram, K.; Kannan, R. Design and Implementation of Adaptive Pufferfish Optimization Algorithm Based Efficient MPPT and DC–DC Boost Converter for Agriculture Applications under Partial Shading Conditions. Intell. Decis. Technol. 2024, 19, 1074–1090. [Google Scholar] [CrossRef]
- Singh, A.K.; Kumar, K.; Choudhury, U.; Yadav, A.K.; Ahmad, A.; Surender, K. Applications of Artificial Intelligence and Cell Balancing Techniques for Battery Management System (BMS) in Electric Vehicles: A Comprehensive Review. Process Saf. Environ. Prot. 2024, 191, 2247–2265. [Google Scholar] [CrossRef]
- Farook, S.; Thrinath, B.V.; Lakshmi, U.R.; Likhitha, N. An Integrated Vehicle-To-Grid and Solar System for Energy Management and Optimization. In Proceedings of the 2024 Second International Conference on Smart Technologies for Power and Renewable Energy (SPECon), Ernakulam, India, 2–4 April 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Zou, B.; Peng, J.; Li, S.; Li, Y.; Yan, J.; Yang, H. Comparative Study of the Dynamic Programming-Based and Rule-Based Operation Strategies for Grid-Connected PV-Battery Systems of Office Buildings. Appl. Energy 2022, 305, 117875. [Google Scholar] [CrossRef]
- Ullah, S.; Hayat, R.; Zeb, K.; Rasheed, A.; Muyeen, S.M. Super-Twisting Sliding Mode Controller for Energy Storage System of a Novel Multisource Hybrid Electric Vehicle: Simulation and Hardware Validation. Int. J. Hydrogen Energy 2024, 71, 952–963. [Google Scholar] [CrossRef]
- Al-Baik, O.; Alomari, S.; Alssayed, O.; Gochhait, S.; Leonova, I.; Dutta, U.; Malik, O.P.; Montazeri, Z.; Dehghani, M. Pufferfish Optimization Algorithm: A New Bio-Inspired Metaheuristic Algorithm for Solving Optimization Problems. Biomimetics 2024, 9, 65. [Google Scholar] [CrossRef]
- Zhai, X.; Li, Z.; Li, Z.; Xue, Y.; Chang, X.; Su, J.; Jin, X.; Wang, P.; Sun, H. Risk-Averse Energy Management for Integrated Electricity and Heat Systems Considering Building Heating Vertical Imbalance: An Asynchronous Decentralized Approach. Appl. Energy 2025, 383, 125271. [Google Scholar] [CrossRef]
- Ding, B.; Li, Z.; Li, Z.; Xue, Y.; Chang, X.; Su, J.; Sun, H. Cooperative Operation for Multiagent Energy Systems Integrated with Wind, Hydrogen, and Buildings: An Asymmetric Nash Bargaining Approach. IEEE Trans. Ind. Inform. 2025, 21, 6410–6421. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Algorithm | Value |
|---|---|---|
| Nominal voltage | Battery | 5000 V |
| Nominal frequency | 60 Hz | |
| Nominal voltage | PV | 5000 V |
| Nominal frequency | 60 Hz | |
| Initial power | 500 × 103 | |
| Nominal voltage | EV | 5000 V |
| Nominal frequency | 60 Hz | |
| Power factor | 1 | |
| Initial load | 200 × 103 | |
| Population size | MPOA | 50 |
| No of variables | 10 | |
| Maximum iteration | 100 | |
| Lower bound | −5 | |
| Upper bound | 5 |
| Temperature (°C) | Max PV Output (KW) | Battery Efficiency (%) | Tracking Error (RMS) |
|---|---|---|---|
| −25 | 120 | 92.0 | 0.045 |
| −10 | 114 | 92.0 | 0.038 |
| 25 (nominal) | 100 | 95.0 | 0.020 |
| 40 | 94 | 93.5 | 0.028 |
| 55 | 88 | 92.0 | 0.035 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, A.K.; Kumar, R.; Chaturvedi, D.K.; Ibraheem; Sharma, G.; Bokoro, P.N.; Kumar, R. Application of Twisting Controller and Modified Pufferfish Optimization Algorithm for Power Management in a Solar PV System with Electric-Vehicle and Load-Demand Integration. Energies 2025, 18, 3785. https://doi.org/10.3390/en18143785
Singh AK, Kumar R, Chaturvedi DK, Ibraheem, Sharma G, Bokoro PN, Kumar R. Application of Twisting Controller and Modified Pufferfish Optimization Algorithm for Power Management in a Solar PV System with Electric-Vehicle and Load-Demand Integration. Energies. 2025; 18(14):3785. https://doi.org/10.3390/en18143785
Chicago/Turabian StyleSingh, Arunesh Kumar, Rohit Kumar, D. K. Chaturvedi, Ibraheem, Gulshan Sharma, Pitshou N. Bokoro, and Rajesh Kumar. 2025. "Application of Twisting Controller and Modified Pufferfish Optimization Algorithm for Power Management in a Solar PV System with Electric-Vehicle and Load-Demand Integration" Energies 18, no. 14: 3785. https://doi.org/10.3390/en18143785
APA StyleSingh, A. K., Kumar, R., Chaturvedi, D. K., Ibraheem, Sharma, G., Bokoro, P. N., & Kumar, R. (2025). Application of Twisting Controller and Modified Pufferfish Optimization Algorithm for Power Management in a Solar PV System with Electric-Vehicle and Load-Demand Integration. Energies, 18(14), 3785. https://doi.org/10.3390/en18143785