
Development of a Surface-Inset Permanent Magnet Motor for Enhanced Torque Density in Electric Mountain Bikes




Abstract
1. Introduction
2. Electric Mountain Bike (E-MTB)
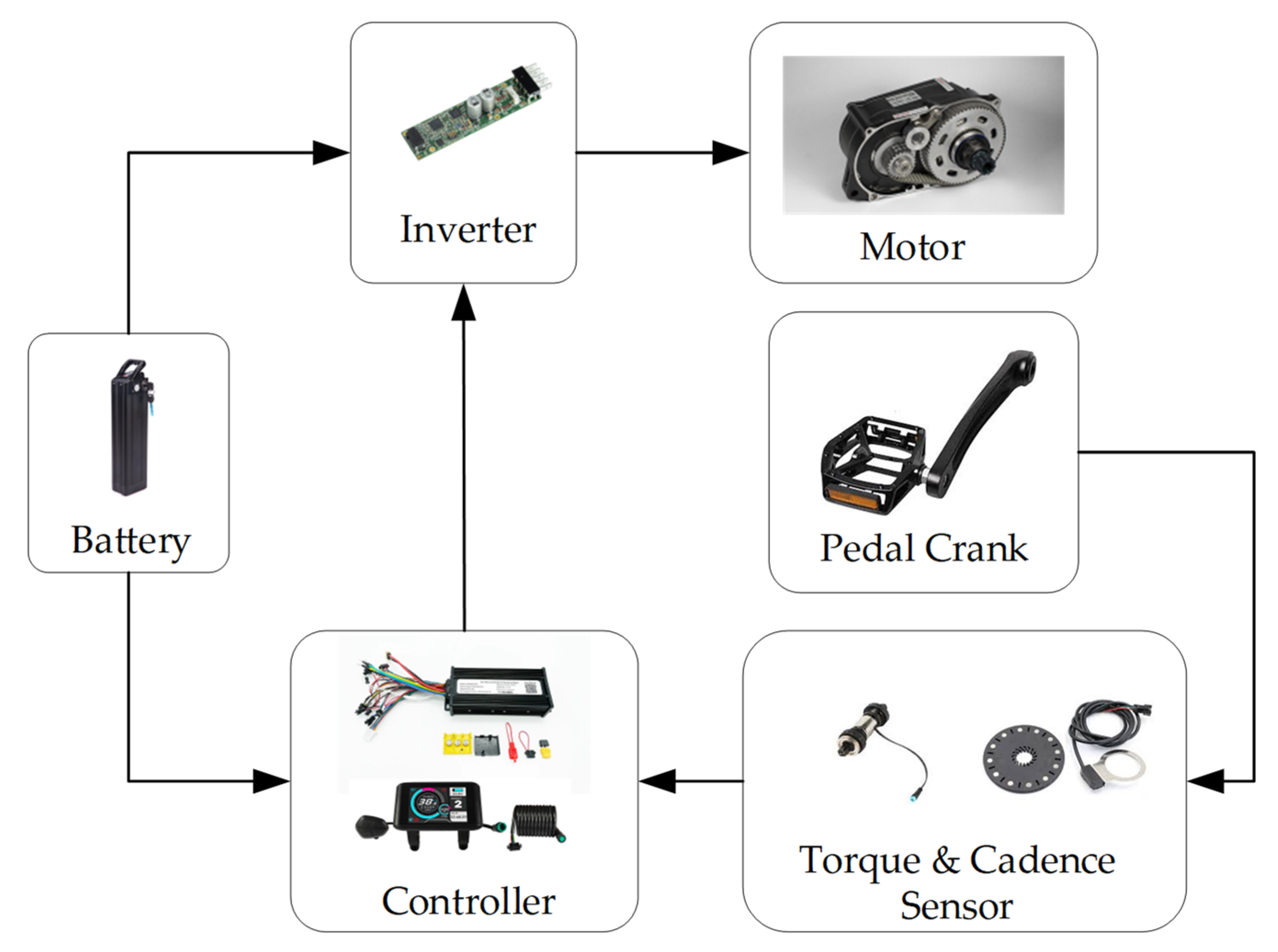
2.1. System Overview
- Battery Pack: Supplies DC electrical energy, typically using lithium-ion cells (36–48 V), which defines the motor’s voltage envelope and energy autonomy;
- Power Converter (Inverter): Converts DC to three-phase AC and regulates current waveform, enabling real-time torque control via modulation strategies;
- Controller Unit: Processes sensor data (pedal torque, cadence, speed), implements field-oriented control (FOC), and manages user-selectable assist levels;
- Torque and Cadence Sensors: Mounted near the pedal crank, these sensors detect rider effort and pedaling rate. The measured torque and cadence signals are transmitted to the controller to determine the level of electric assistance required, enabling responsive and proportional support;
- Electric Motor: Converts electrical energy into mechanical torque and assists the rider through one of several integration strategies.
2.2. Motor Integration Configurations
2.2.1. Front Hub Motors
2.2.2. Rear Hub Motors
2.2.3. Mid-Drive Motors
3. Analytical Modelling
3.1. Cogging Torque
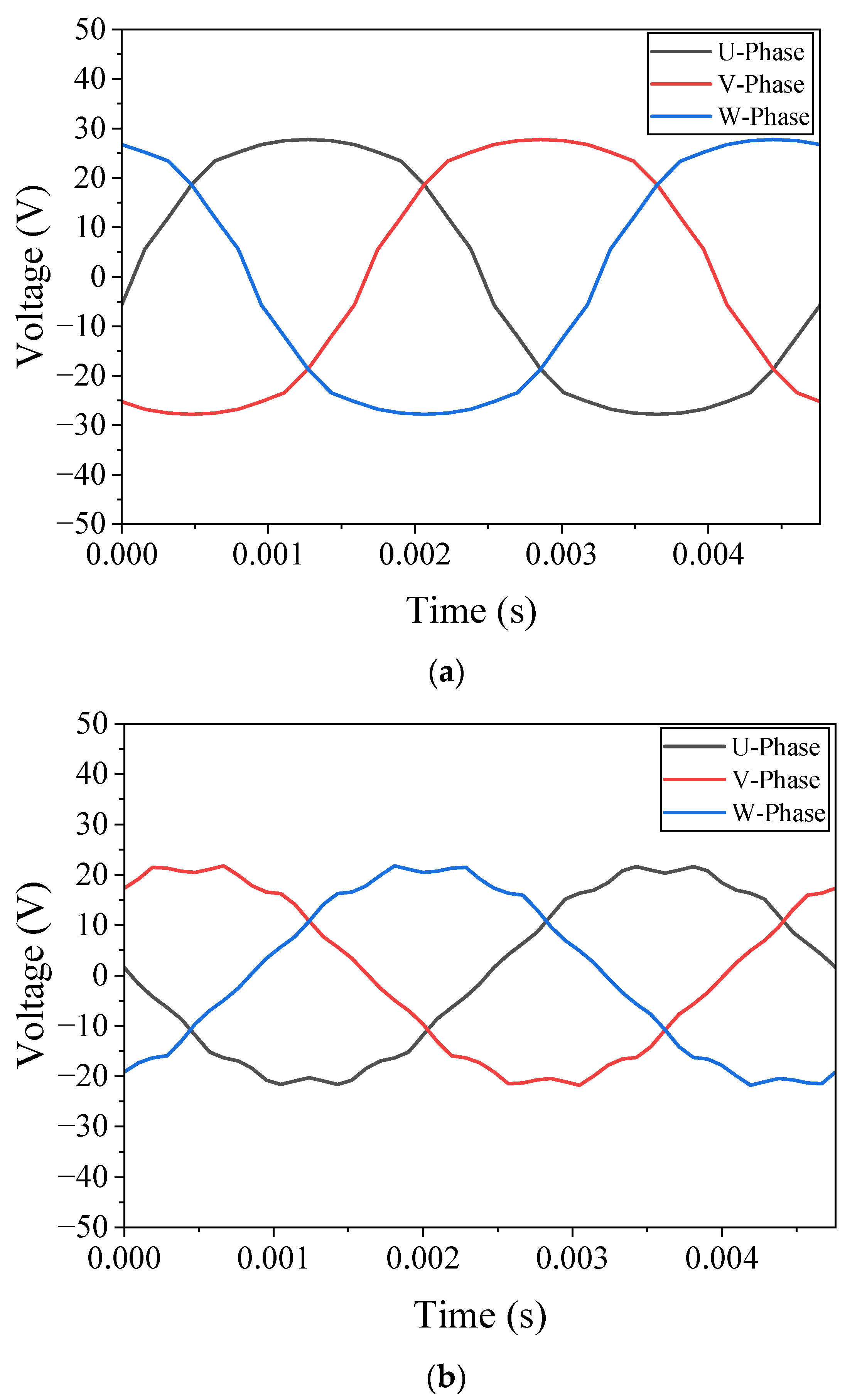
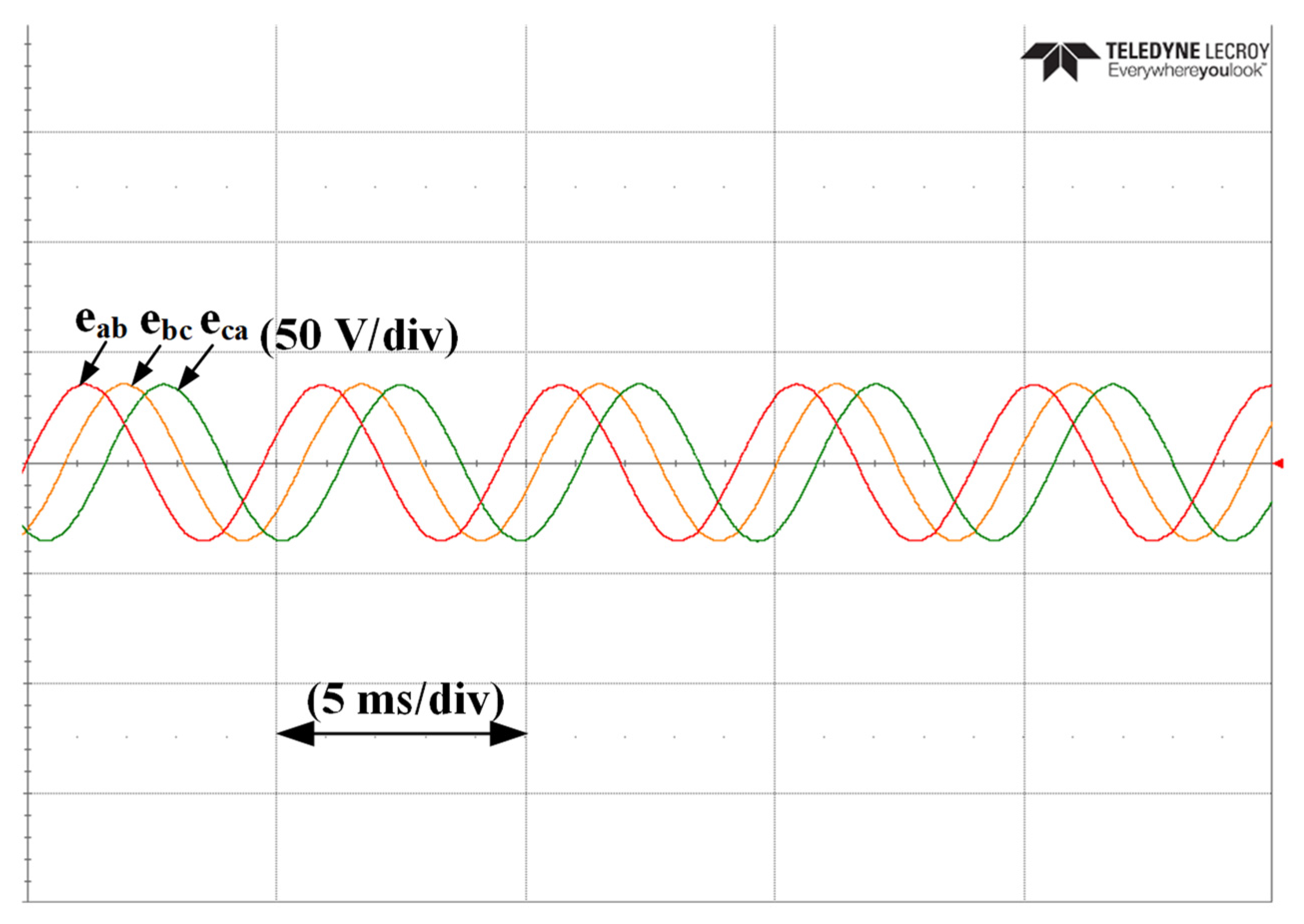
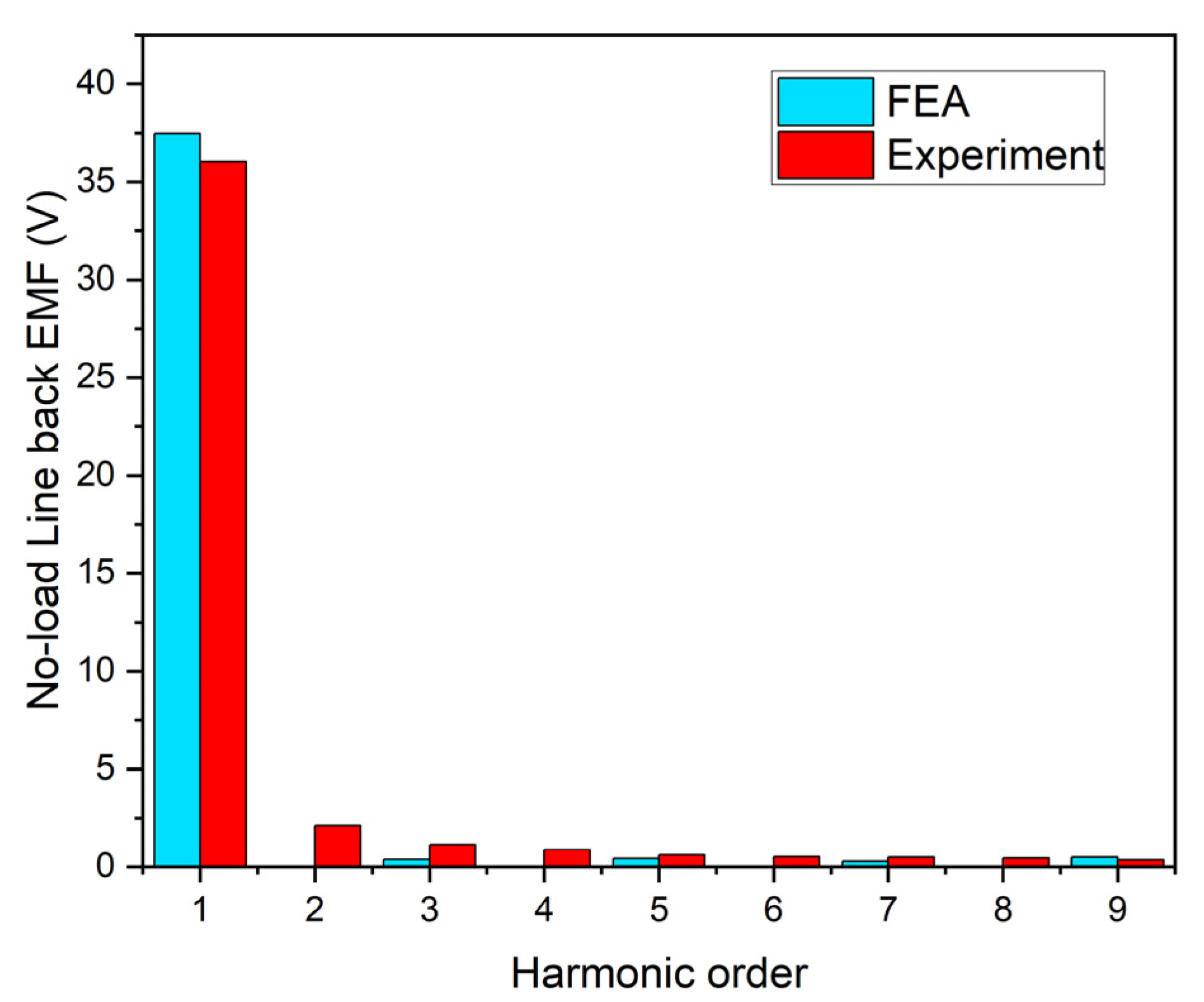
3.2. Back-EMF Calculation
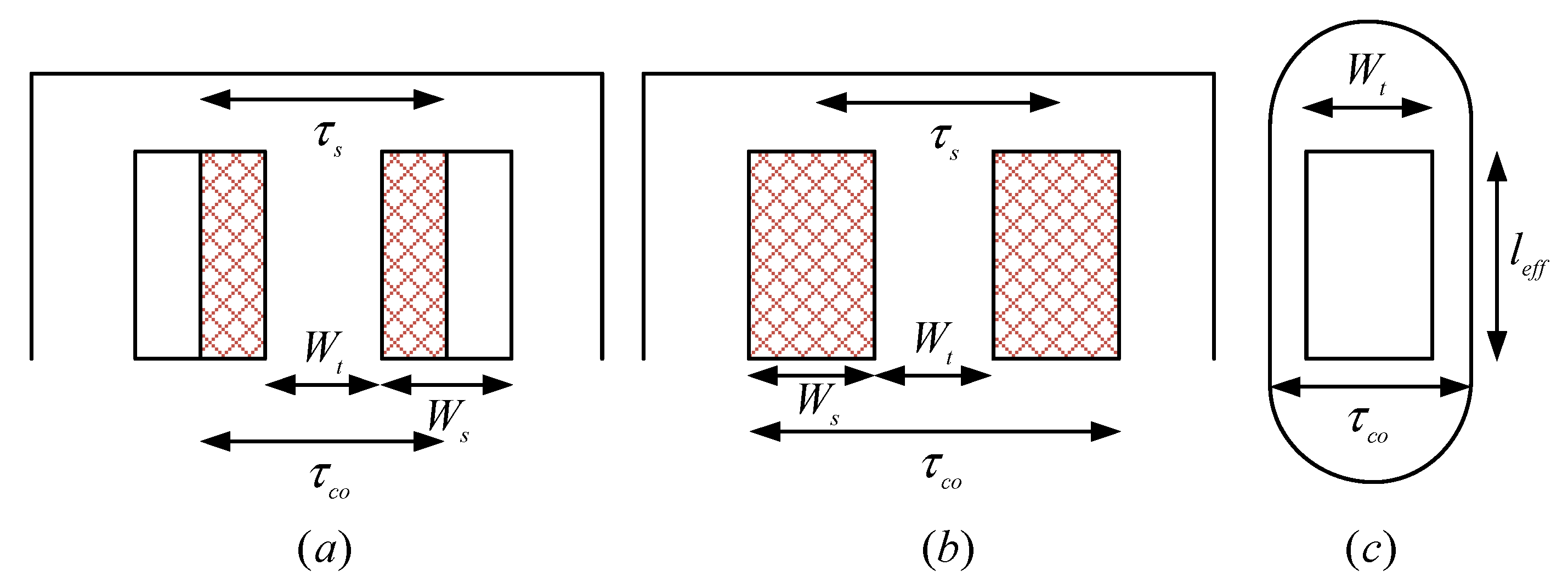
3.3. Resistance and Inductance Calculations
- (1)
- Resistance Calculations: Calculating resistance is straightforward, except for estimating the average length of the concentrated winding turns. The end turn lengths vary as the turns extend further from the tooth wall.
- (2)
- Inductance Calculations: Machine inductances can be efficiently calculated using winding functions. For example, the phase self-inductance is given by:
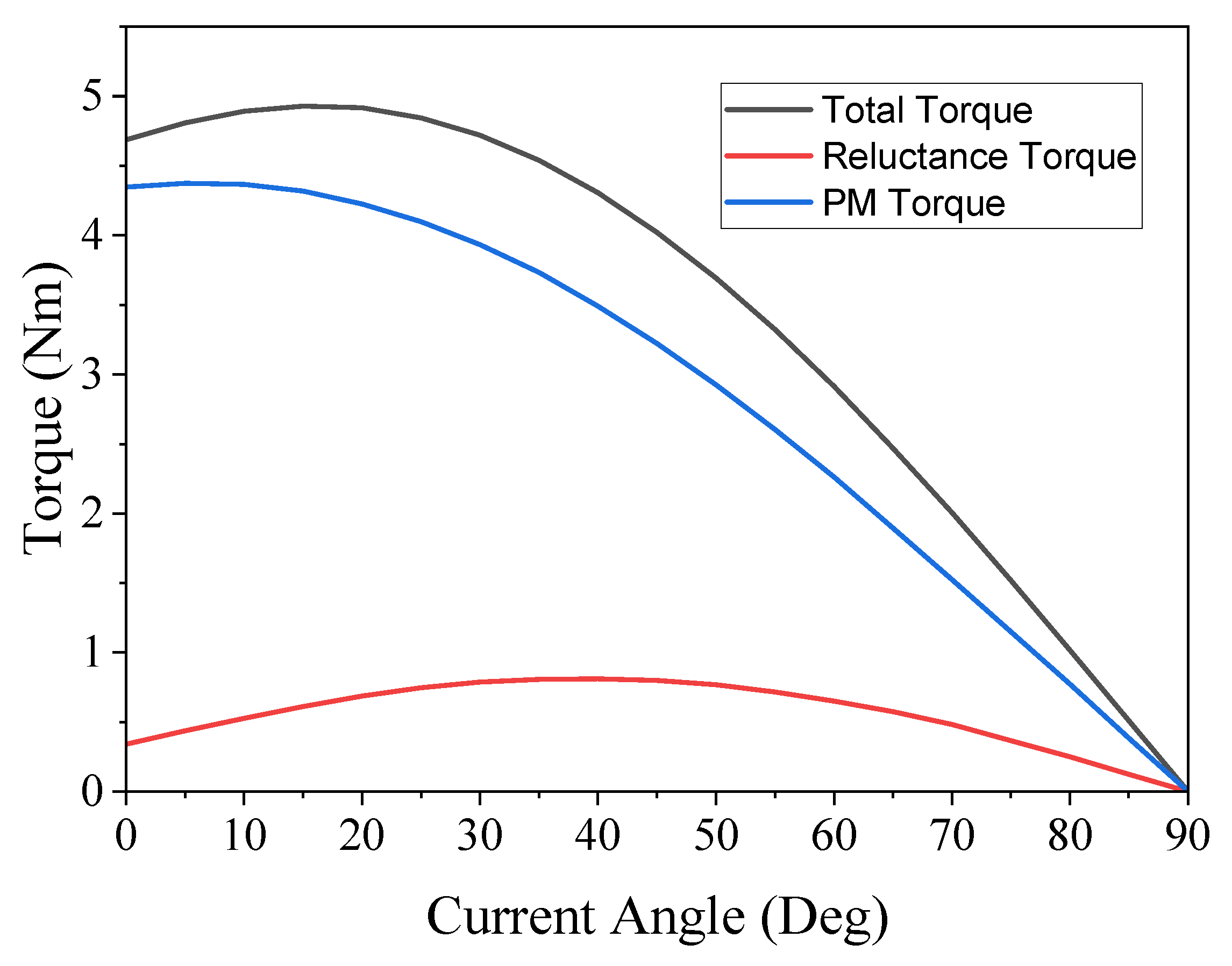
3.4. Torque Equation
4. Simulation Results
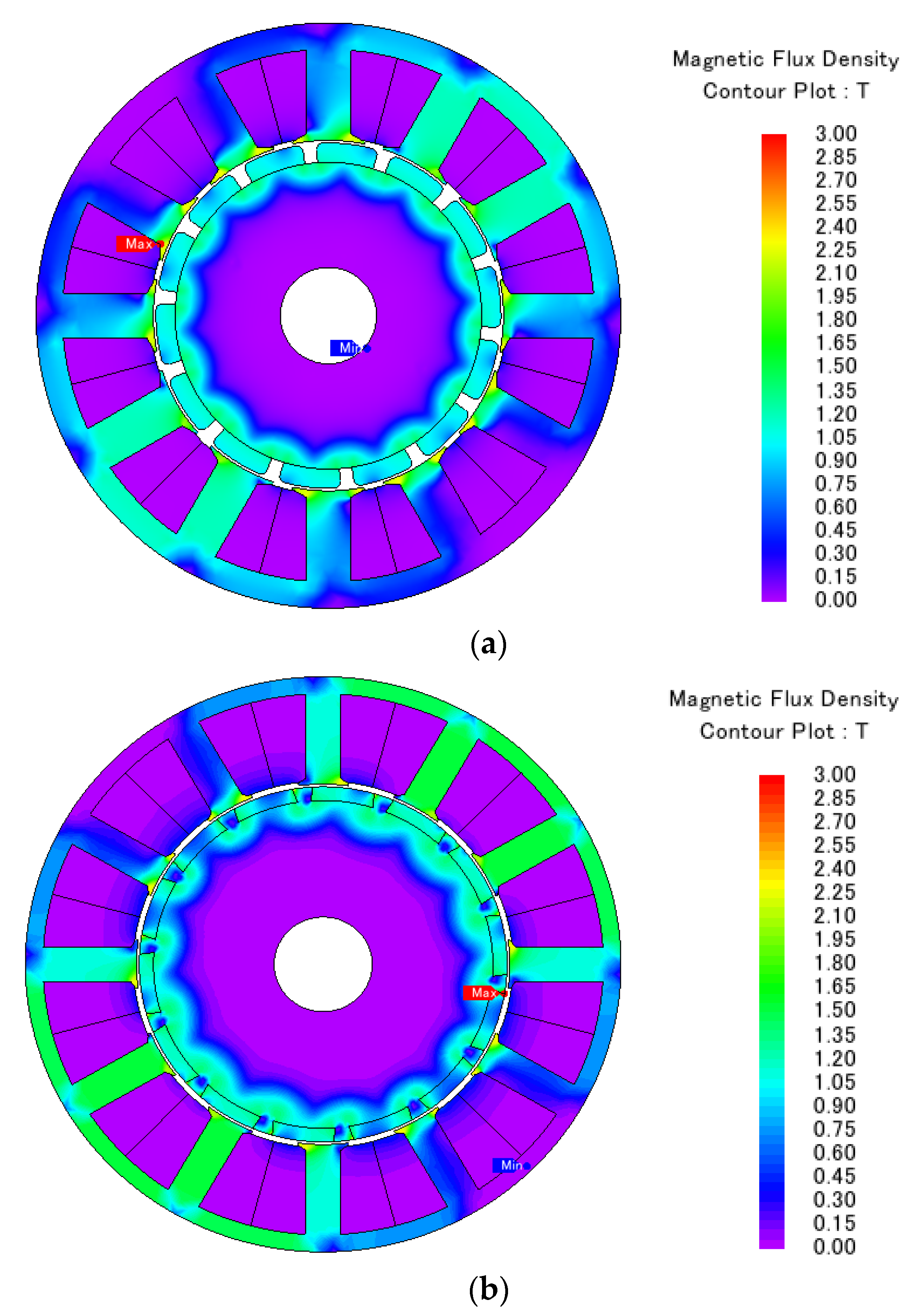
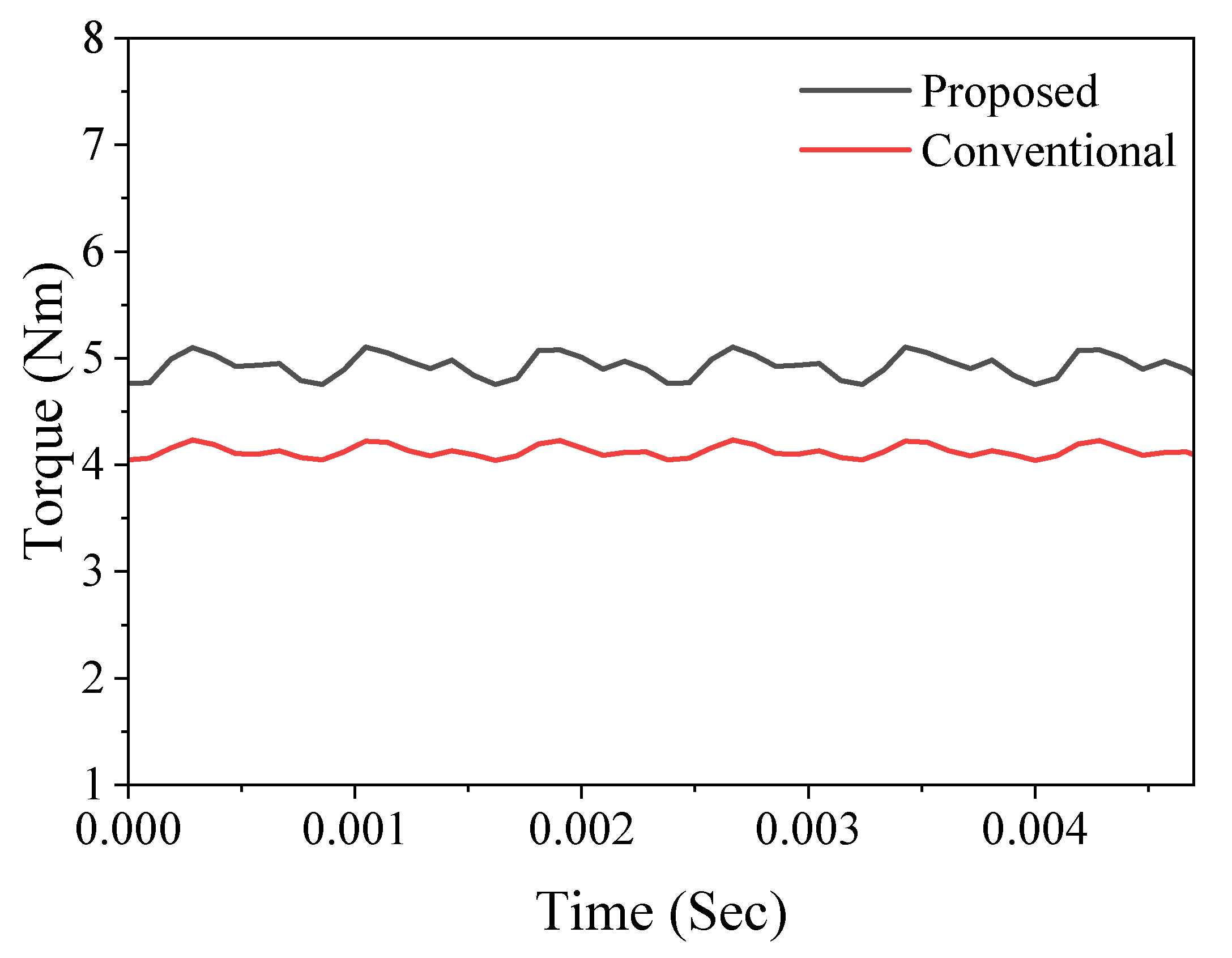
Finite Element Analysis Simulated Results
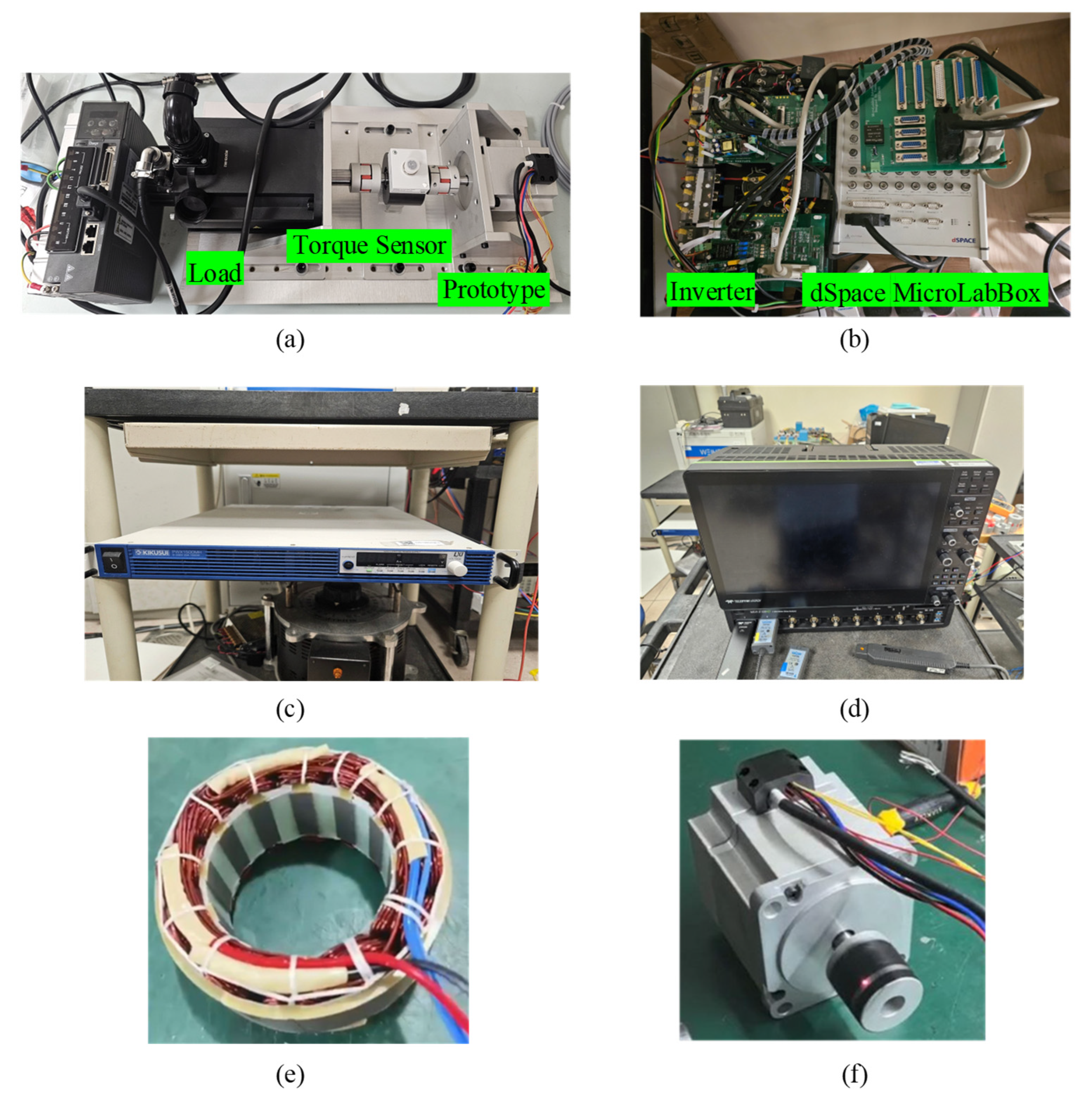
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Contò, C.; Bianchi, N. E-Bike Motor Drive: A Review of Configurations and Capabilities. Energies 2022, 16, 160. [Google Scholar] [CrossRef]
- Contò, C.; Bianchi, N. A Guideline for Selecting Motors for Electric Bikes Based on Magnetic Analysis and Measurements. IEEE Trans. Energy Convers. 2024, 39, 97–106. [Google Scholar] [CrossRef]
- Muetze, A.; Tan, Y.C. Modeling and Analysis of the Technical Performance of DC-Motor Electric Bicycle Drives Based on Bicycle Road Test Data. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; Volume 2, pp. 1574–1581. [Google Scholar]
- E-Bike Lithium-ion Battery Market Size, Market Outlook, Trends & Forecast; Bikes and Motorcycles; V.M. Reports: Washington, DC, USA, February 2025; Available online: https://www.verifiedmarketreports.com/product/e-bike-lithium-ion-battery-market/ (accessed on 14 May 2025).
- Xie, S.; Yu, Y.; Yang, G.; He, Y.; Yan, Y.; Cai, S.; Yuan, X.; Han, B.S.; Hoang, C.C.; Lee, C.H.T. Comprehensive Comparison of Permanent Magnet Synchronous Machine and Vernier Machine. In Proceedings of the IECON 2023—49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 16–19 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Lee, C.H.T.; Hua, W.; Long, T.; Jiang, C.; Iyer, L.V. A Critical Review of Emerging Technologies for Electric and Hybrid Vehicles. IEEE Open J. Veh. Technol. 2021, 2, 471–485. [Google Scholar] [CrossRef]
- Cao, L.; Chau, K.T.; Lee, C.H.T.; Lam, W.-H. Design and Analysis of a New Parallel-Hybrid-Excited Machine With Harmonic-Shift Structure. IEEE Trans. Ind. Electron. 2020, 67, 1759–1770. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, S.; Aguilar-Zamorate, I.S.; Galluzzi, R.; Zenerino, E.C.; Tonoli, A. Optimizing Mid-Drive Electric Motor Performance and Cost for Electric Bike Applications. In Proceedings of the 2024 International Conference on Electrical Machines (ICEM), Torino, Italy, 1–4 September 2024; pp. 1–7. [Google Scholar]
- Lin, J.; Schofield, N.; Emadi, A. External-Rotor 6-10 Switched Reluctance Motor for an Electric Bicycle. IEEE Trans. Transp. Electrif. 2015, 1, 348–356. [Google Scholar] [CrossRef]
- Chlebosz, W.; Ombach, G.; Junak, J. Comparison of permanent magnet brushless motor with outer and inner rotor used in e-bike. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–5. [Google Scholar]
- Zhu, J.; Yuan, X.; Eric Cheng, K.W.; Lee, C.H.T. Deep-investigated Flux Weakening Analysis of the Direct-drive Surface Permanent Magnet Vernier Motors for Traction Applications. In Proceedings of the 2022 IEEE 9th International Conference on Power Electronics Systems and Applications (PESA), Hong Kong, China, 20–22 September 2022; IEEE: Piscataway, NJ, USA; pp. 1–7. [Google Scholar]
- Turbo Levo—Specialized. Available online: https://www.specialized.com/us/en/shop/bikes/electric-bikes/electric-mountain-bikes/turbo-levo (accessed on 14 May 2025).
- Performance Line CX: The Sportiest Bosch Motor for eMTBs. Available online: https://www.bosch-ebike.com/en/products/performance-line-cx (accessed on 14 May 2025).
- EP8 DRIVE UNIT. Available online: https://bike.shimano.com/products/components/pdp.P-DU-EP801.html (accessed on 14 May 2025).
- Hunger, M. Yamaha PW-X3—In Our Big E-Mountainbike Motor Comparison Test. Available online: https://ebike-mtb.com/en/yamaha-pw-x3-review/ (accessed on 14 May 2025).
- Datasheet_Brose_DrivePeak3. Available online: https://www.brose-ebike.com/de-en/products/ (accessed on 19 June 2025).
- Bafang Home. Available online: https://www.bafang-e.com/en/products/motors/m-series/m510 (accessed on 14 May 2025).
- FAZUA RIDE 60. Available online: https://fazua.com/en/products/ride-60/ (accessed on 14 May 2025).
- The New TQ-HPR50 E-BIKE SYSTEM. Available online: https://www.tq-ebike.com/en/ (accessed on 14 May 2025).
- GX Ultimate Mountain. Available online: https://industry.panasonic.eu/products/devices/e-bike-systems/e-bike-motor-unit/gx-ultimate-mountain (accessed on 14 May 2025).
- Ecodrive Plus Battery E-Bike Battery 36V 48V Spare Battery Pack. Available online: https://www.falconpev.com.sg/collections/best-e-bike-e-scooter-for-singapore-ul2272-en15194/products/ecodrive-48v-10ah-detachable-battery (accessed on 30 May 2025).
- Infineon Technologies AG. REF_48V_270W_EBIKE|Compact Motor Inverter for E-Bikes and Micromobility—Infineon Technologies. Available online: https://www.infineon.com/cms/en/product/evaluation-boards/ref_48v_270w_ebike/ (accessed on 30 May 2025).
- 60V-72V 1500W-3000W 45A 3-Mode Sine Wave Ebike Controller with Colorful LCD Display (Regenerative only for 60/72V). Available online: https://hallomotor.com/products/60v-72v-1500w-3000w-45a-3-mode-sine-wave-ebike-controller-with-colorful-lcd-display-regenerative-only-for-60v-72v (accessed on 30 May 2025).
- Brose Significantly Extends the Lifespan of the S Mag. Available online: https://www.brose-ebike.com/de-en/presse/smag.html (accessed on 30 May 2025).
- Mark, S. E-Bike Tech Explained: Torque Sensor or Cadence Sensor? Cycling Electric. 2023. Available online: https://www.cyclingelectric.com/in-depth/e-bike-tech-explained-torque-sensor-or-cadence-sensor (accessed on 30 May 2025).
- TT-EBIKE Bicycle Crank Arm, 170mm Aluminium Alloy Crank Arm Set Bike Cr. Available online: https://www.tt-ebike.com/?srsltid=AfmBOoqTBIeebUIwuXEJ4iqh-SYRhnX85avFgbdGMm3St4ULxOjtjWiV (accessed on 30 May 2025).
- Faradonbeh, M.A.; Faradonbeh, V.Z.; Amiri, E. Design Modeling and Prototyping of a 55 Watts Surface Mounted PM Machine With High Torque and Low Torque Ripple for Cooling Fan Application. IEEE Access 2024, 12, 50244–50253. [Google Scholar] [CrossRef]
- El-Refaie, A.M.; Jahns, T.M.; Novotny, D.W. Analysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated Windings. IEEE Trans. Energy Convers. 2006, 21, 34–43. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Instantaneous magnetic field distribution in brushless permanent magnet DC motors. III. Effect of stator slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the Performances and Parameters of Interior PMSM Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Yang, Y.; Castano, S.M.; Yang, R.; Kasprzak, M.; Bilgin, B.; Sathyan, A.; Dadkhah, H.; Emadi, A. Design and Comparison of Interior Permanent Magnet Motor Topologies for Traction Applications. IEEE Trans. Transp. Electrif. 2017, 3, 86–97. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Atallah, K. Design Optimization of a Surface-Mounted Permanent-Magnet Motor With Concentrated Windings for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2013, 62, 1053–1064. [Google Scholar] [CrossRef]
- Gan, J.; Chau, K.T.; Chan, C.C.; Jiang, J.Z. A new surface-inset, permanent-magnet, brushless DC motor drive for electric vehicles. IEEE Trans. Magn. 2000, 36, 3810–3818. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Brand | Motor | Torque (Nm) | Motor Weight (kg) |
|---|---|---|---|
| Specialized | Specialized Turbo [12] | 90 | 2.98 |
| Bosch | Bosch Performance Line CX [13] | 85 | 2.9 |
| Shimano | Shimano EP8 [14] | 85 | 2.6 |
| Yamaha | Yamaha PW-X3 [15] | 85 | 2.75 |
| Brose | Brose Drive 3 [16] | 95 | 2.9 |
| Bafang | Bafang M510 [17] | 95 | 2.9 |
| Fazua | Fazua Ride 60 [18] | 60 | 1.96 |
| TQ | TQ-HPR50 [19] | 50 | 1.85 |
| Panasonic | Panasonic GX Ultimate [20] | 95 | 2.95 |
| Parameters | Conventional Prototype | Proposed |
|---|---|---|
| Number of stator slots | 12 | |
| Number of rotor pole pairs | 7 | |
| Gear ratio | 27.1 | |
| Stator outer diameter (mm) | 91 | |
| Stator inner diameter (mm) | 54.5 | 57 |
| Stack length (mm) | 25 | |
| Winding factor | 0.933 | |
| Stator yoke thickness (mm) | 4.1 | 2.7 |
| Stator teeth width (mm) | 7 | 5.4 |
| Tooth tip (mm) | 3 | 7.2 |
| Pole arc (degrees) | 21 | 19.3 |
| PM thickness (mm) | 3 | 2.18 |
| Slot filling factor | 0.3 | 0.4 |
| Current density A/mm2 | 14.5 | 10 |
| PM material | N42UH | N48 |
| Steel type | 50JN1300 | |
| Parameters | Benchmark Motor | Proposed Motor Simulation | Experimental |
|---|---|---|---|
| Peak torque | 4 Nm | 4.9 Nm | 4.62 Nm |
| Torque density | 24.6 kNm/m3 | 30.14 kNm/m3 | 28.41 kNm/m3 |
| Efficiency | 83% | 84% | 80% |
| Copper losses | 93 W | 85 W | - |
| Torque/PM volume | 416 Nm/L | 673 Nm/L | 635 Nm/L |
| Peak power | 628 W | 770 W | 726 W |
| Rated speed (rpm) | 1500 | 1500 | 1500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goh, J.W.; Xie, S.; Wang, H.; Zhu, S.; Yu, K.; Lee, C.H.T. Development of a Surface-Inset Permanent Magnet Motor for Enhanced Torque Density in Electric Mountain Bikes. Energies 2025, 18, 3709. https://doi.org/10.3390/en18143709
Goh JW, Xie S, Wang H, Zhu S, Yu K, Lee CHT. Development of a Surface-Inset Permanent Magnet Motor for Enhanced Torque Density in Electric Mountain Bikes. Energies. 2025; 18(14):3709. https://doi.org/10.3390/en18143709
Chicago/Turabian StyleGoh, Jun Wei, Shuangchun Xie, Huanzhi Wang, Shengdao Zhu, Kailiang Yu, and Christopher H. T. Lee. 2025. "Development of a Surface-Inset Permanent Magnet Motor for Enhanced Torque Density in Electric Mountain Bikes" Energies 18, no. 14: 3709. https://doi.org/10.3390/en18143709
APA StyleGoh, J. W., Xie, S., Wang, H., Zhu, S., Yu, K., & Lee, C. H. T. (2025). Development of a Surface-Inset Permanent Magnet Motor for Enhanced Torque Density in Electric Mountain Bikes. Energies, 18(14), 3709. https://doi.org/10.3390/en18143709