A Coordinated Communication and Power Management Strategy for DC Converters in Renewable Energy Systems


Abstract
1. Introduction
2. Analysis of Pulse Signal Method Based on Bus Voltage
2.1. Droop Curve Analysis
2.2. Analysis of Communication Method
3. Controller Design
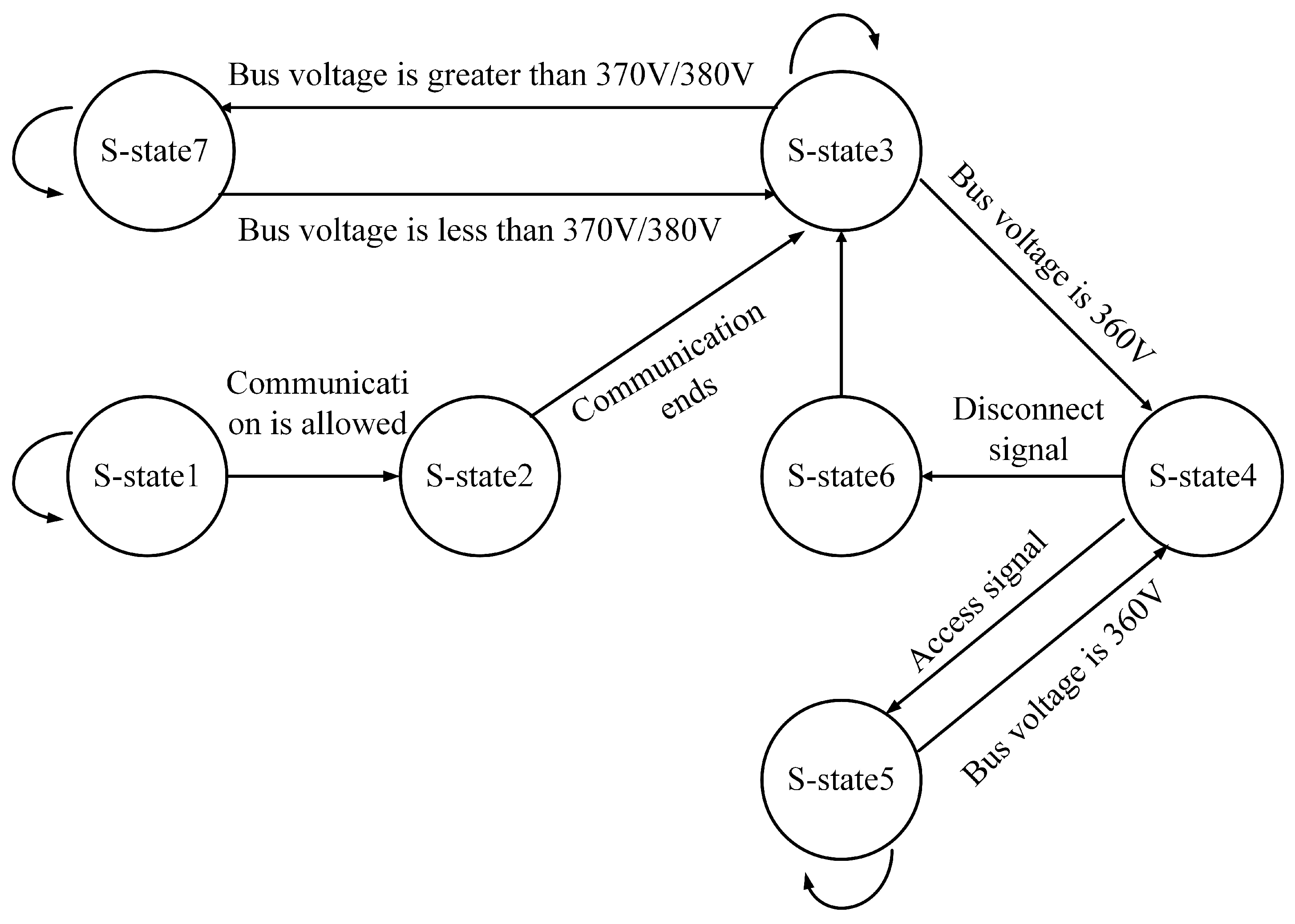
4. System Operating Mode Analysis
4.1. Master Module Operating Mode Analysis
4.2. Slave Module Operating Mode Analysis
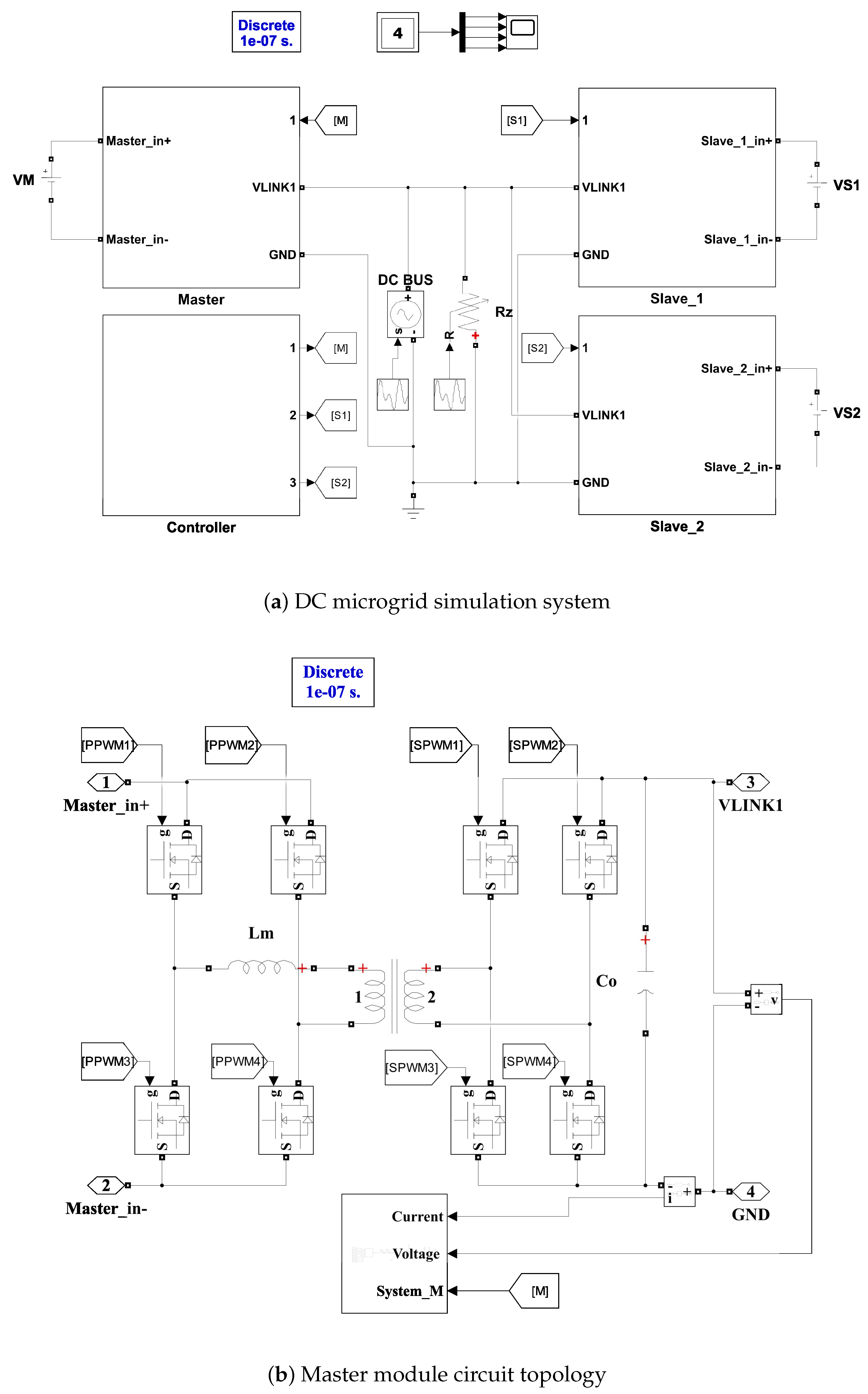
5. Simulation Verification
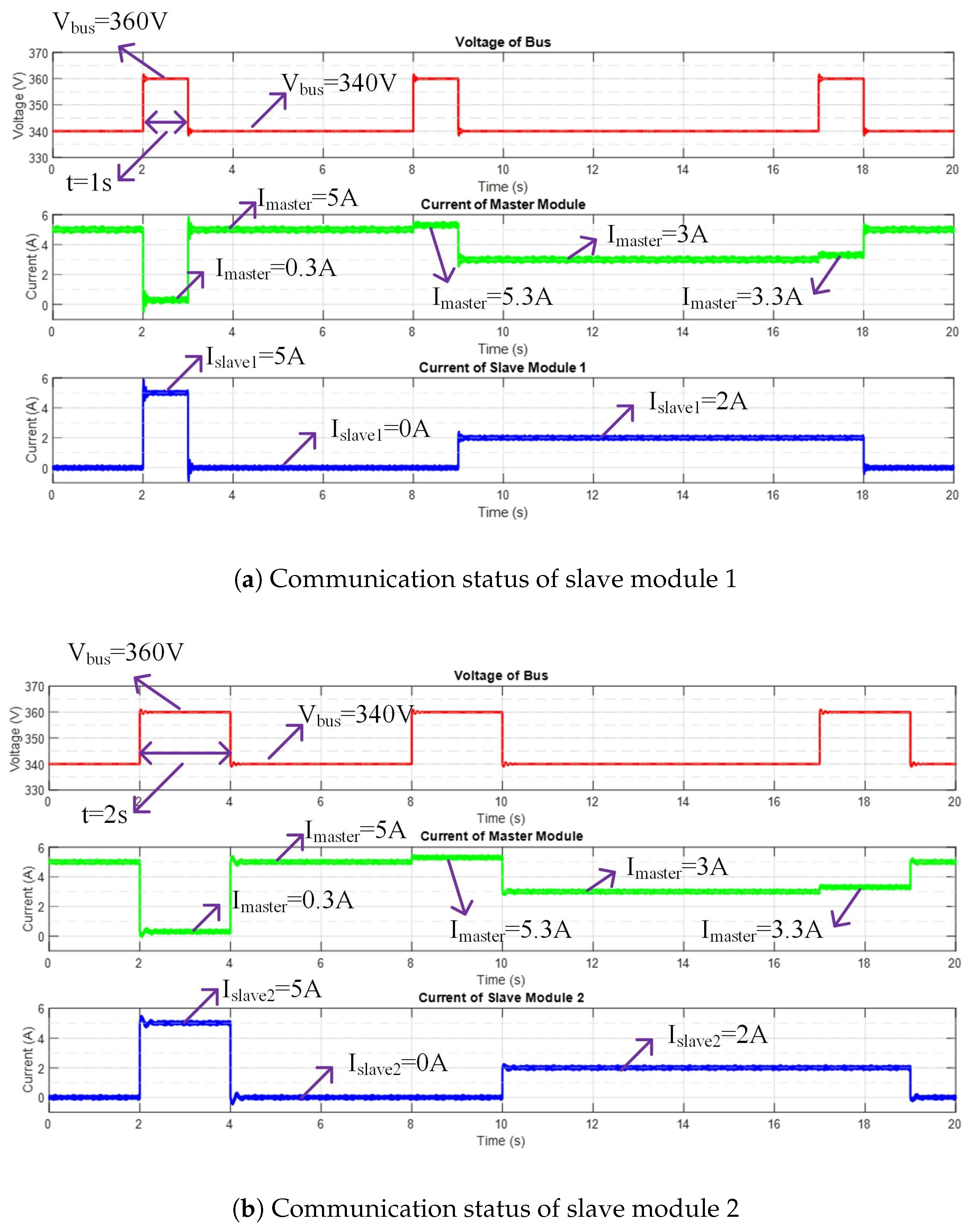
5.1. Simulation Verification of Fixed Load
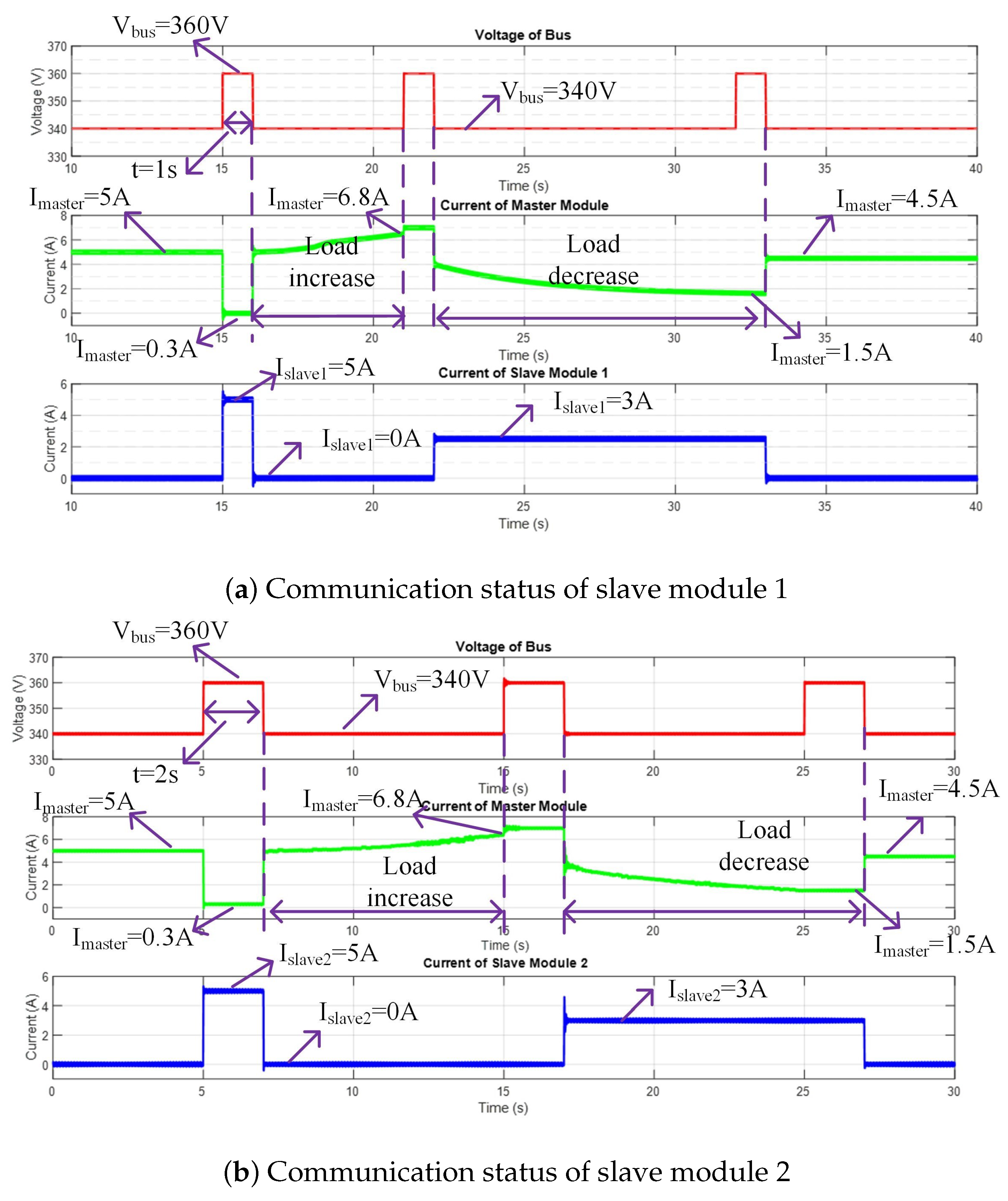
5.2. Simulation Verification of Load Variation
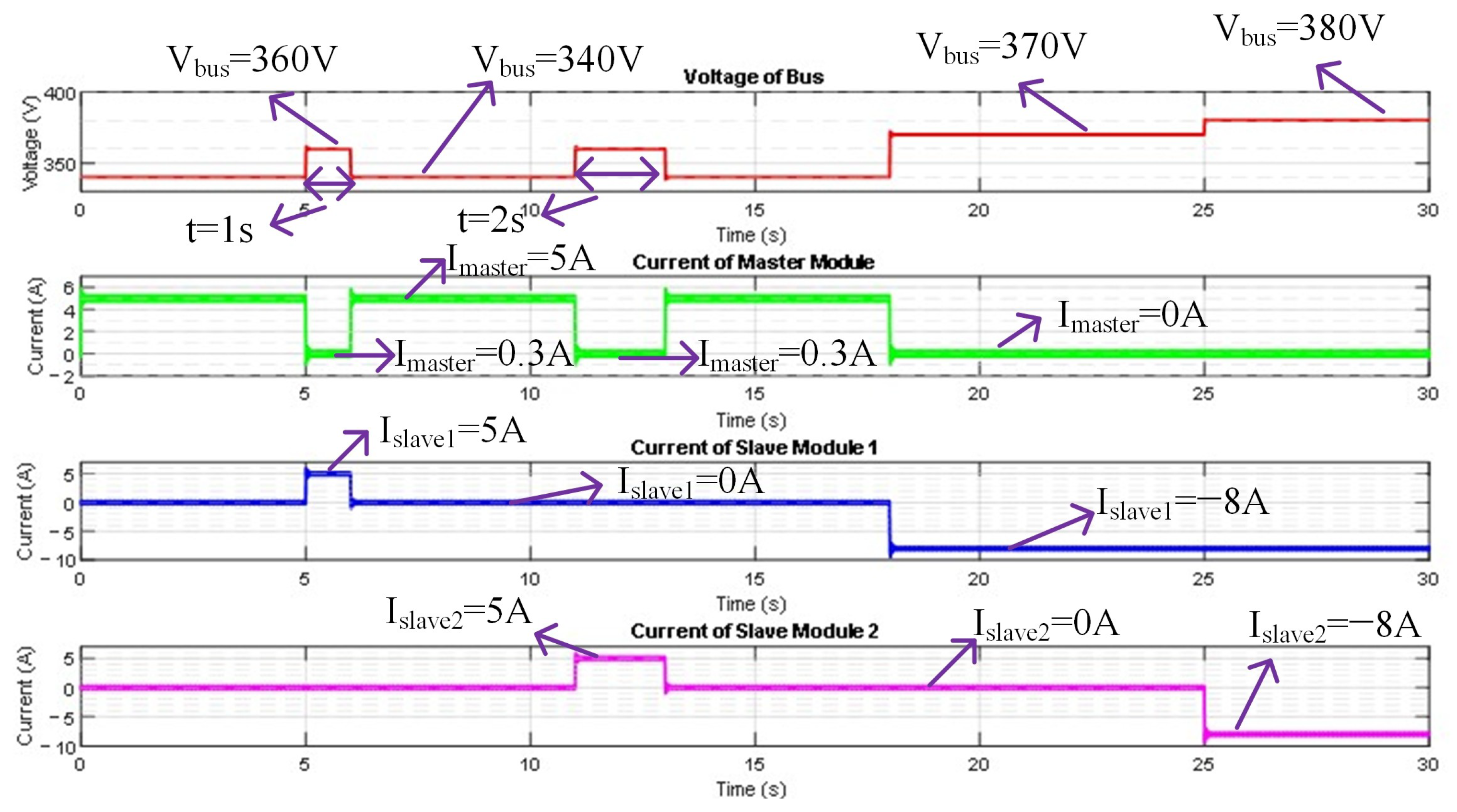
5.3. Simulation Verification of Bus Voltage Change
5.4. Simulation Verification of Constant Power Load
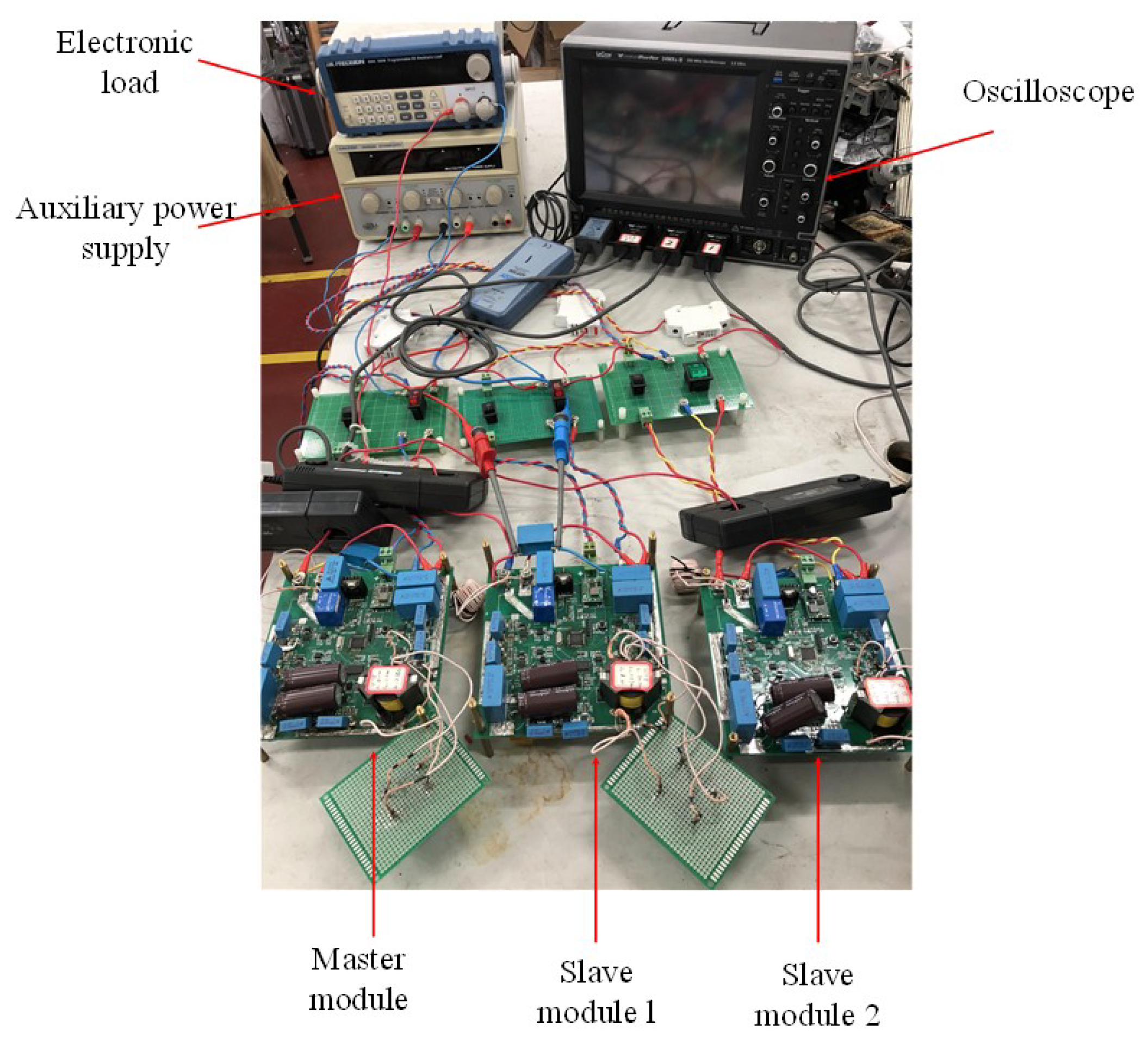
6. Experimental Verification
6.1. Experiment of Fixed Load
6.2. Experiment of Variable Load
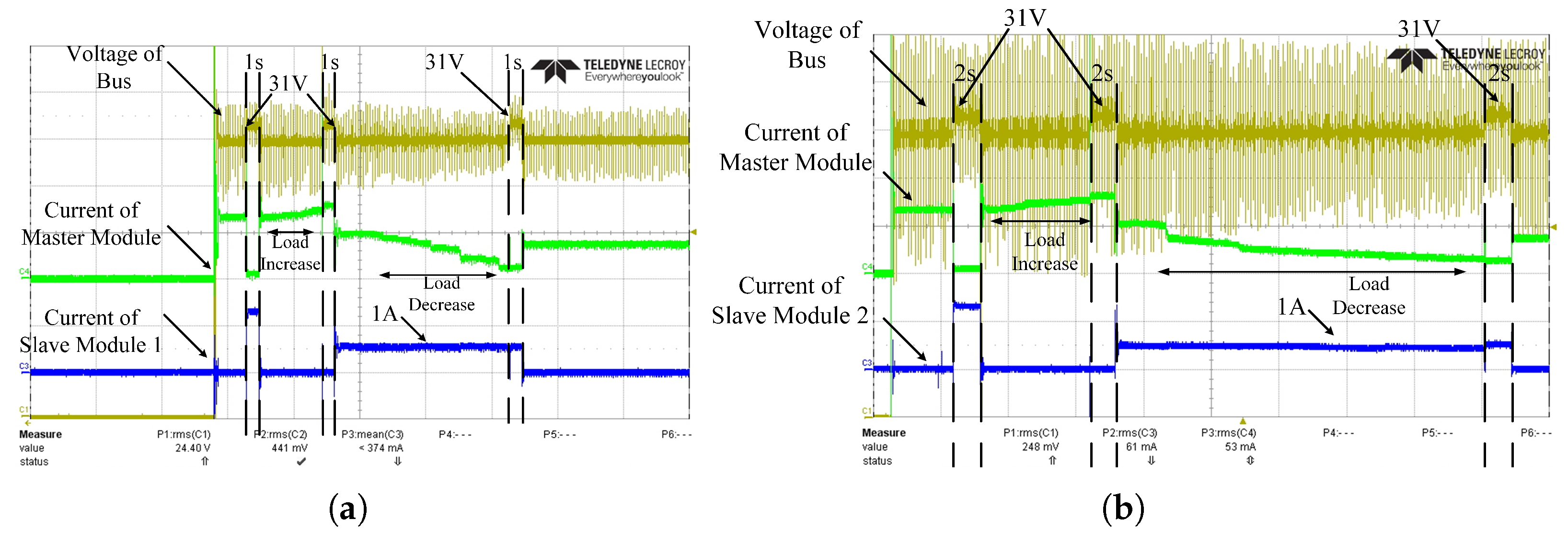
6.3. Experiment on Bus Voltage Variation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shi, Z.; Wang, W.; Huang, Y.; Li, P.; Dong, L. Simultaneous optimization of renewable energy and energy storage capacity with the hierarchical control. Csee J. Power Energy Syst. 2022, 8, 95–104. [Google Scholar]
- Li, J.; Fang, Z.; Wang, Q.; Zhang, M.; Li, Y.; Zhang, W. Optimal Operation with Dynamic Partitioning Strategy for Centralized Shared Energy Storage Station with Integration of Large-scale Renewable Energy. J. Mod. Power Syst. Clean Energy 2024, 12, 359–370. [Google Scholar] [CrossRef]
- Yang, H.; Shen, W.; Yu, Q.; Liu, J.; Jiang, Y.; Ackom, E.; Dong, Z.Y. Coordinated demand response of rail transit load and energy storage system considering driving comfort. CSEE J. Power Energy Syst. 2020, 6, 749–759. [Google Scholar]
- Kini, R.L.; Drigal, N.; Jiang, Y.; Vartanian, C.; Maple, S.; Kolln, J. Integration of Distributed Energy Resources for Microgrid. In Proceedings of the 2025 IEEE PES Grid Edge Technologies Conference Exposition (Grid Edge), San Diego, CA, USA, 21–23 January 2025; IEEE Power & Energy Society: San Diego, CA, USA, 2025; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, H.; Yang, Y.; Wang, X.; Loh, P.C.; Blaabjerg, F.; Wang, W.; Xu, D. An Enhanced Dual Droop Control Scheme for Resilient Active Power Sharing Among Paralleled Two-Stage Converters. IEEE Trans. Power Electron. 2017, 32, 6091–6104. [Google Scholar] [CrossRef]
- Song, A.; Tang, W.; Liu, Z.; Li, H. An Externally Adjustable Overcurrent Protection Circuit for High-Current DC-DC Converters. In Proceedings of the 2023 3rd International Conference on Electrical Engineering and Control Science (IC2ECS), Hangzhou, China, 29–31 December 2023; pp. 489–493. [Google Scholar] [CrossRef]
- Stallmann, F.; Liebchen, G.; Mertens, A. Initial Start and Synchronization Algorithm for Droop-Controlled Inverters with Consideration of the Inner Voltage Control Loop. In Proceedings of the 2022 IEEE PES 14th Asia-Pacific Power and Energy Engineering Conference (APPEEC), Melbourne, Australia, 20–23 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Fan, B.; Li, Q.; Wang, W.; Yao, G.; Ma, H.; Zeng, X.; Guerrero, J.M. A Novel Droop Control Strategy of Reactive Power Sharing Based on Adaptive Virtual Impedance in Microgrids. IEEE Trans. Ind. Electron. 2022, 69, 11335–11347. [Google Scholar] [CrossRef]
- Dadi, R.; Meenakshy, K.; Damodaran, S.K. A Modified Droop Control Method for DC Microgrid with Improved Voltage Regulation and Current Sharing. In Proceedings of the 2020 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 10–12 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sevostyanov, N.A.; Gorbunov, R.L. Control Strategy to Mitigate Voltage Ripples in Droop-Controlled DC Microgrids. IEEE Trans. Power Electron. 2023, 38, 15377–15389. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Bi, D.; Wen, Y.; Dai, Y.; Yin, X.; Shen, Z.J. Droop Control Strategy Incorporating Coupling Compensation and Virtual Impedance for Microgrid Application. IEEE Trans. Energy Convers. 2019, 34, 277–291. [Google Scholar] [CrossRef]
- Zhao, P.; Liu, Z.; Zhao, Y.; Wang, Q.; Liu, J. An Adaptive Piecewise Droop Control Strategy for DC Microgrids. In Proceedings of the 2021 IEEE Fourth International Conference on DC Microgrids (ICDCM), Arlington, VA, USA, 17–19 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Sharma, S.; Iyer, V.M.; Bhattacharya, S. A Load Profile Based Optimized Piecewise Droop Control for DC Microgrids. In Proceedings of the 2021 IEEE Fourth International Conference on DC Microgrids (ICDCM), Arlington, VA, USA, 18–21 July 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Ozcelik, M.A.; Clark, T.; Ruppert, M.; Sun, J. Modeling and Analysis of Transient Overvoltage due to Reclosing of Distributed Energy Resources. In Proceedings of the 2023 27th International Conference Electronics, Palanga, Lithuania, 19–27 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Sondharangalla, M.; Moldovan, D.; Ayyanar, R. A Novel Asymmetric Distributed Voltage Regulation Scheme to Enhance the Utilization of Distributed Energy Resources. In Proceedings of the 2024 IEEE 52nd Photovoltaic Specialist Conference (PVSC), Seattle, WA, USA, 8–13 June 2024; pp. 0469–0474. [Google Scholar] [CrossRef]
- Wang, W.; Lei, X.; Wei, B.; He, K.; Yang, P. Research on Adaptive Droop Control Strategy of DC Active Power and Voltage in DC Microgrid. In Proceedings of the 2023 International Conference on Power Energy Systems and Applications (ICoPESA), Nanjing, China, 24–26 February 2023; pp. 627–632. [Google Scholar] [CrossRef]
- He, J.; Liu, Y.; Wang, Y. Cascaded Droop and Inverse Droop Regulation for Two-Layer Coordinated Power Flow Control in Series-Connected Power Cells. IEEE Trans. Ind. Electron. 2021, 68, 6939–6951. [Google Scholar] [CrossRef]
- Xie, X.; Quan, X.; Wu, Z.; Cao, X.; Dou, X.; Hu, Q. Adaptive Master-Slave Control Strategy for Medium Voltage DC Distribution Systems Based on a Novel Nonlinear Droop Controller. IEEE Trans. Smart Grid 2021, 12, 4765–4777. [Google Scholar] [CrossRef]
- Eto, Y.; Noge, Y.; Shoyama, M.; Babasaki, T. Control System of PV Source for DC Distribution System with Seamless Operation Transition Between I-V Droop Control and Current Control for MPPT. IEEE Trans. Ind. Appl. 2024, 60, 3638–3652. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhong, F.; Jiang, Z.; Gao, J.; Yang, X.; Liu, S. Simulation and implementation of new energy grid-connected power line communication system based on FPGA. In Proceedings of the 2024 7th International Conference on Electronics Technology (ICET), Chengdu, China, 17–20 May 2024; pp. 796–801. [Google Scholar] [CrossRef]
- Nateghi, A.; Schaarschmidt, M.; Fisahn, S.; Garbe, H. Susceptibility of Power Line Communication (PLC) Channel to DS, AM and Jamming Intentional Electromagnetic Interferences. In Proceedings of the 2021 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Nusa Dua-Bali, Indonesia, 27–30 September 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Huo, X.; Xie, X.; Wu, Z.; Cao, X. A Novel DC Voltage Control Strategy for DC Distribution Based on Adaptive Droop Control. In Proceedings of the 2020 4th International Conference on Green Energy and Applications (ICGEA), Singapore, 7–9 March 2020; pp. 40–44. [Google Scholar] [CrossRef]
- Belal, E.K.; Yehia, D.M.; El Gebaly, A.E.; Azmy, A.M.; Ali, G.E.M. Enhancing Transient Response in Autonomous DC microgrids Via Adaptive Droop control with Virtual inertia. In Proceedings of the 2024 25th International Middle East Power System Conference (MEPCON), Cairo, Egypt, 17–19 December 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Nasab, M.R.; Cometa, R.; Ghalebani, P.; Bruno, S.; Scala, M.L. Distributed Adaptive Droop Control Method for Flexibility Enhancement of Islanded DC Microgrids Including Electric Springs. In Proceedings of the 2024 Energy Conversion Congress Expo Europe (ECCE Europe), Darmstadt, Germany, 2–6 September 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Matehkolaei, M.J.; Peyghami, S.; Mokhtari, H.; Blaabjerg, F. An Adaptive droop Curve for the Superimposed Frequency Method in DC Microgrids. In Proceedings of the 2020 IEEE 21st Workshop on Control and Modeling for Power Electronics (COMPEL), Aalborg, Denmark, 9–12 November 2020; pp. 1–6. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| System input voltage | 200–400 V |
| Switching frequency | 100 kHz |
| Primary inductor | 810 H |
| Secondary inductor | 1.6 mH |
| Output capacitor | 2200 F |
| Load resistance | 40–180 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, F.; Kawaguchi, T.; Hashimoto, S.; Jiang, W. A Coordinated Communication and Power Management Strategy for DC Converters in Renewable Energy Systems. Energies 2025, 18, 3329. https://doi.org/10.3390/en18133329
Zhou F, Kawaguchi T, Hashimoto S, Jiang W. A Coordinated Communication and Power Management Strategy for DC Converters in Renewable Energy Systems. Energies. 2025; 18(13):3329. https://doi.org/10.3390/en18133329
Chicago/Turabian StyleZhou, Feng, Takahiro Kawaguchi, Seiji Hashimoto, and Wei Jiang. 2025. "A Coordinated Communication and Power Management Strategy for DC Converters in Renewable Energy Systems" Energies 18, no. 13: 3329. https://doi.org/10.3390/en18133329
APA StyleZhou, F., Kawaguchi, T., Hashimoto, S., & Jiang, W. (2025). A Coordinated Communication and Power Management Strategy for DC Converters in Renewable Energy Systems. Energies, 18(13), 3329. https://doi.org/10.3390/en18133329