1. Introduction
In recent years, with the proposal and promotion of China’s “dual carbon” goals, distributed renewable energy has become increasingly prevalent [
1]. The volatility and uncertainty of these resources present new challenges to the safe and stable operation of power systems [
2,
3,
4]. In the new power system being developed in China, the distribution network layer encompasses a massive amount of distributed energy resources (DERs). By aggregating these distributed resources, it is possible to create a virtual power plant (VPP) that can be managed by grid operators. This approach is crucial for supporting the efficient utilization of distributed renewable energy, improving grid regulation capabilities, and ensuring the high-quality operation of the power system [
5]. However, the dispersed and heterogeneous characteristics of distributed flexible resources [
6] present considerable difficulties for the aggregation of these resources into a VPP and for assessing their regulation capabilities. Consequently, accurately and efficiently evaluating and characterizing the feasible regulation power range of a VPP has emerged as a key research topic.
Current research predominantly determines the power-feasible region of a VPP as the projection of the feasible region onto the P-Q plane at a single moment [
7], the relationship of active power output between different connection nodes at a single moment [
8,
9], and the output boundaries and virtual state-of-charge boundaries over multiple moments [
10,
11,
12,
13]. Ref. [
14] employs an inscribed hyperbox-based aggregated flexibility projection method to characterize the day-ahead multi-period peak load regulation domain of a VPP that aggregates distributed electricity and hydrogen resources. By considering the integration of electricity and hydrogen, this approach enhances the total power range and net income. Ref. [
15] constructs a VPP aggregation model that takes into account DER network constraints and temporal coupling constraints. Based on a two-stage robust optimization model, it proposes an aggregation method under uncertainty scenarios and characterizes the P-Q feasible region of the VPP. In Ref. [
16], Brouwer’s fixed-point theorem is applied to the second-order Taylor expansion of the nonlinear Dist-flow equations. This application allows for the construction of linear constraints that serve to internally approximate the Alternating Current (AC) feasible region for power transmission. The study then verifies the effectiveness of this approach by employing a vertex search method on an IEEE 33-node test system. Ref. [
17] combines a data-driven approach with a distributed robust optimization model to propose a time-varying feasible domain evaluation method across multiple periods. This significantly improves computational efficiency and accuracy. Ref. [
18] proposes a boundary contraction method based on high-dimensional polytopes to characterize the multi-period output and ramping boundaries of a VPP, and it equivalently models this as a combination of virtual energy storage and a virtual generator. Ref. [
19] focuses on coupled constraint models such as the ramping constraints of gas turbines in smart distribution networks. It transforms the vertex search problem into a min–max bi-level progressive vertex search problem, significantly improving computational efficiency compared to the original vertex search method. This has substantial methodological implications for solving the feasible region of VPPs. Ref. [
20] focuses on a VPP with decoupled electricity and heat, proposing a virtual energy storage (VES) modeling method for electric and thermal demand response. It introduces the Minkowski sum to represent the VES power range as an aggregated low-dimensional flexibility region, effectively improving the economic efficiency and carbon reduction of the VPP. Ref. [
21] proposes a feasible region projection method based on a two-stage robust optimization model. It reformulates the dynamic economic robust scheduling model equivalently into a single-level linear programming model. This model can be effectively solved while ensuring the optimality of the solution, laying the methodological foundation for characterizing the robust feasible region of a VPP.
In summary, existing studies predominantly focus on evaluating the P-Q safe operating power region of a VPP at a single time period or the output and ramping upper bounds of a VPP over multiple periods. Fewer studies accurately characterize the output relationships between adjacent time periods. Additionally, due to the limited consideration of the impact of single-time-period feasibility region characterization on other time periods in current research, this results in an inability to fully assess the potential regulation capacity brought by other time periods (without considering temporal coupling constraints) or significant deviations between the full-time output and original power operating points near the feasibility region boundary (considering temporal coupling constraints but not the impact of single-time-period feasibility region characterization on other time periods). Therefore, there is an urgent need to research methods for constructing a multi-objective time–domain coupled feasible region for VPPs that considers global stability. Based on the above research needs, this paper introduces Lyapunov stability theory. During the process of characterizing the VPP feasibility region, we construct a full-time output stability index for VPPs to control the deviation between full-time output and original operating power points. Based on this, we propose a method for constructing a multi-objective time–domain coupled feasibility region for VPPs considering global stability. The proposed method ensures full-time output stability of VPPs while accurately characterizing the temporal coupling feasibility region, promoting the efficient participation of VPPs in China’s electricity market, and accelerating the development of new power systems.
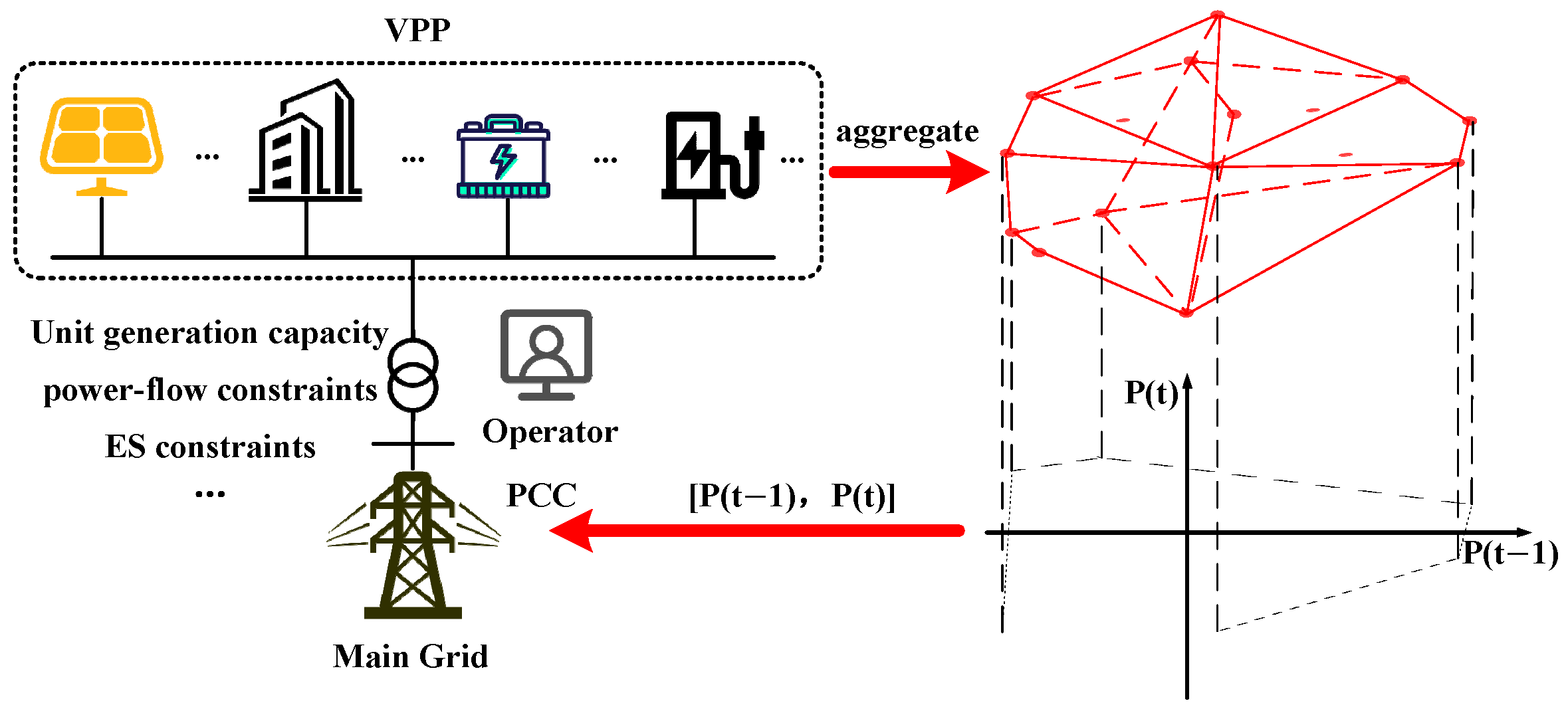
First, this paper cites Reference [
14] to determine the feasible region of a VPP as the projection of its high-dimensional space aggregate onto the active power in adjacent time periods. The resulting temporal coupling feasibility region of the VPP not only represents the upper and lower limits of VPP output for specific time periods but also determines the upper and lower limits of ramping capability to the next time period based on the current operating power, as shown in
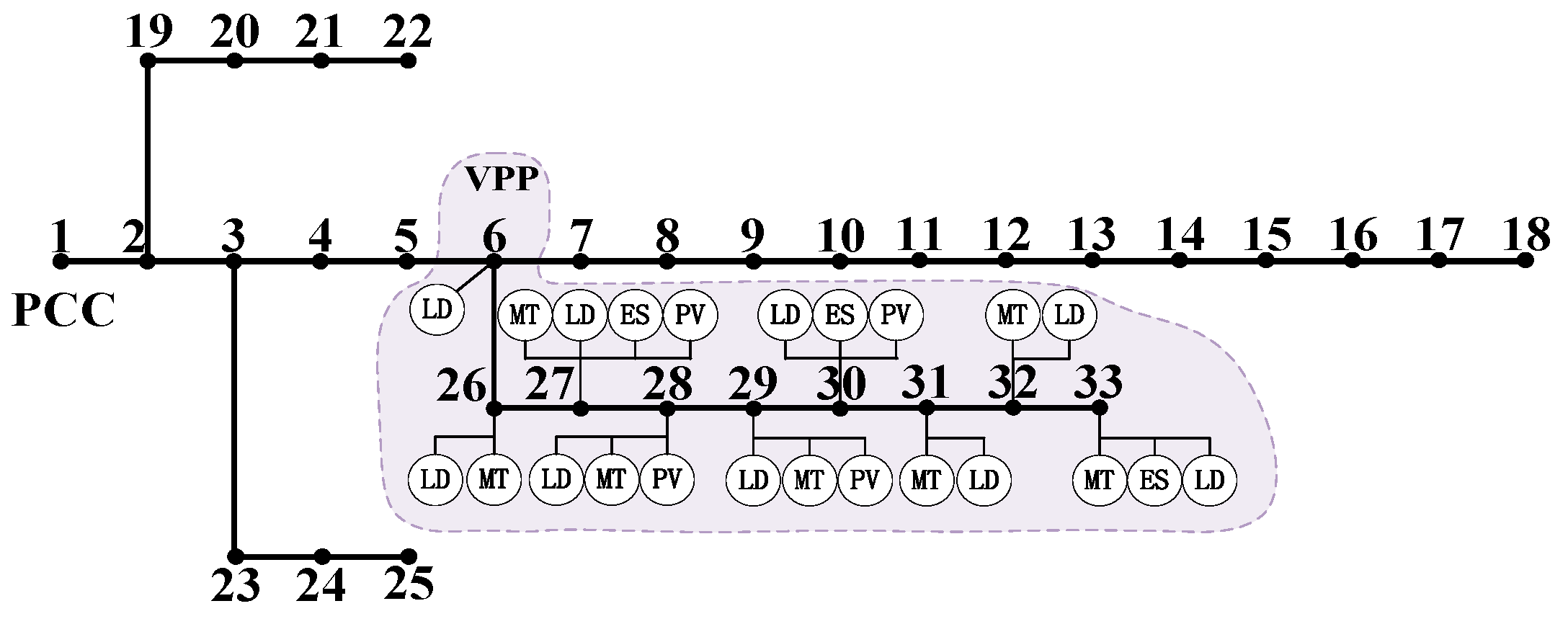
Figure 1; Then, based on the principles of Lyapunov stability analysis, this paper proposes a global stability index to characterize the output stability of VPPs. Combining this with the method for characterizing the feasible region of VPPs, the paper introduces a multi-objective time–domain coupled feasible region construction method that considers global stability. Finally, this paper applies the vertex search method to characterize the output boundaries and active power-feasible region of adjacent time periods for a VPP aggregated on the IEEE 33-bus standard distribution network system, and it verifies the feasibility of the proposed method.
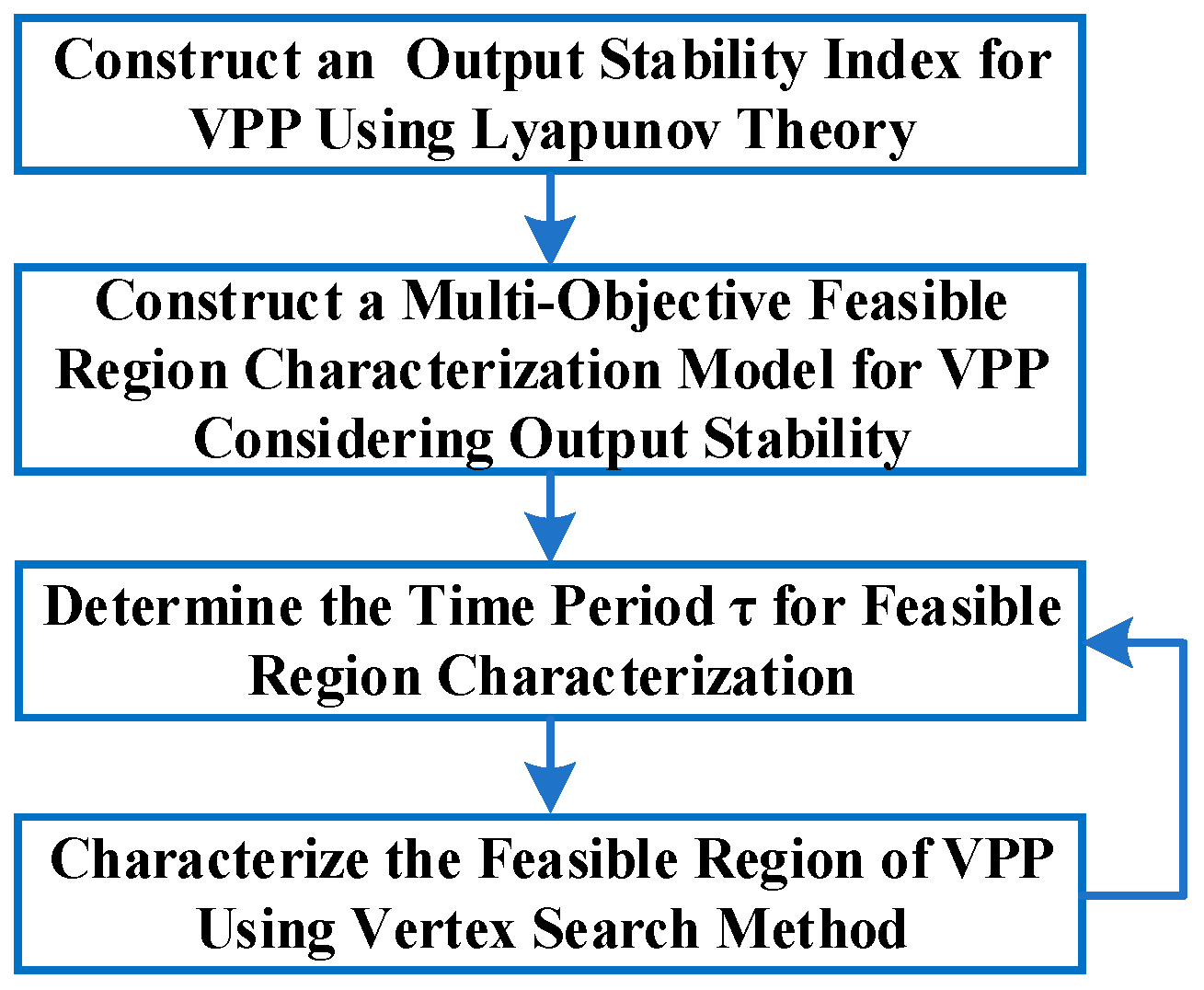
The brief process framework of the proposed method is shown in
Figure 2. Firstly, this paper introduces Lyapunov theory to construct a VPP output stability index. Secondly, by integrating the VPP aggregation model, it develops a multi-objective feasibility region characterization model for VPPs considering output stability. Finally, it iteratively solves the temporal coupling feasibility regions of VPPs for different time periods, thereby obtaining the multi-objective time–domain coupled feasibility region of VPPs considering global stability.
The symbols and abbreviations used in this paper are listed in
Table 1.
2. The Feasible Region Characterization Model for VPPs
2.1. Establishment of VPP Model
The aggregated resources within a VPP include DERs and flexible loads. Specifically, the DERs consist of distributed photovoltaic (PV) systems and distributed wind power, while the flexible loads include shiftable loads and distributed energy storage systems. The setting background for the feasible region model used in this paper involves the aggregation of large-scale flexible resources to participate in grid scheduling. Therefore, under the premise of establishing a reasonable model, a balance between detailed modeling and solution efficiency is sought. To achieve this, the study adopts the linearized power flow model proposed in Ref. [
22].
2.1.1. DERs
Given the fluctuating nature of PV output, constraints involving random variables can be represented as chance constraints. This means that the constraints are maintained at a specific confidence level. The general form of a chance constraint is as follows:
where
is the probability that event
holds true;
represents a random variable associated with
;
denotes the confidence level for the corresponding chance constraint.
The above chance constraints are transformed into deterministic constraints as:
where
is the quantile;
is the inverse function of
.
The specific form of Equation (2) can be calculated by giving the confidence level α into the corresponding .
- 2.
Distributed gas turbine
The constraints of distributed gas turbines include output upper and lower bound constraints and ramp constraints.
where
is the active power output by
at time
;
is the upper limit of
output power at time
;
is the upper limit of
ramp power at time
.
- 3.
Distributed energy storage
The constraints of distributed energy storage include power constraints and state of charge (SOC) operation constraints [
23,
24,
25]. The model is:
where
and
are the charge and discharge power of energy storage e at time t, respectively;
is the charge and discharge state of energy storage e at time t, 1 is discharge, 0 is charging;
is the maximum charge and discharge power of energy storage e;
is the state of charge of energy storage e at time t;
is the charge and discharge efficiency of energy storage e;
and
are the maximum and small state of charge of the energy storage e, respectively;
is the initial state of charge of the energy storage e during the scheduling period;
is the state of charge at the end of the energy storage e in the scheduling period.
- 4.
Flexible load
The VPP can interrupt the supply to flexible loads within acceptable limits, without affecting users’ comfort levels. This demonstrates the adjustable capability of flexible loads. The model for this is described as follows:
where
is the actual power of the adjustable load
l in the VPP;
and
are the upper and lower limits of the adjustable load power in the VPP,
, where
is the actual power demand of the load;
represents the accumulated electricity that does not meet the load demand.
2.1.2. Network Constraint
The network constraints are represented as follows:
where
is the active power of line
ij at time
t;
is the reactance of line
ij;
is the phase angle of node i at time t;
is the external active power output of VPP at time t;
, and
are the upper and lower limits of active power flow of line
ij.
2.1.3. Return Constraint
Given that the stability of a VPP alliance relies on objective revenues to sustain itself, profitability is a necessary condition for the formation of a feasible region for the VPP. To address this, this paper considers the dispatch costs and revenues of various resources within the VPP and constructs revenue chance constraints for the VPP as follows:
where
represents the difference between the VPP and the original operating point. Considering that there is a nonlinear term
in the revenue opportunity constraint of the VPP, this paper completely linearizes
by mathematical method. The linearized revenue opportunity constraint is as follows:
where
represents the adjustment power compensation of VPP;
and
are linear variables representing absolute values;
is a maximal number;
and
are Boolean variables;
represents the adjustment cost of photovoltaic in VPP;
represents the regulation cost of micro gas turbine in VPP;
represents the adjustment cost of flexible load in VPP;
is the adjusted expected return of VPP.
where
is the photovoltaic on-grid price;
represents the output offset of PV units in the process of VPP feasible region boundary characterization.
- 2.
Regulation cost of micro gas turbine
In this paper, the secondary operation cost function of the micro gas turbine is piecewise linearized, as shown below.
where
represents the piecewise linearization slope of the quadratic cost function of the micro gas turbine;
represents the offset of the output of the gas turbine in the linearization stage
u.
- 3.
Regulation cost of flexible load
where
is the electricity price of the flexible load at time t;
represents the offset between the flexible load
l and the original power demand at time t.
- 4.
Regulation cost of energy storage
where
is the operating cost of energy storage unit;
and
represent the offset between the energy storage charging and discharging power and the original operating point.
2.2. Virtual-Power-Plant-Feasible Region Search Method
Given that all constraints within the VPP model are linear constraints, the facets of the high-dimensional polytope characterized by the VPP model are all planes. Therefore, the projection of this polytope into lower dimensions results in a polygon with a finite number of edges. The vertex search method’s basic approach involves solving a sequence of optimization problems that have varying objective functions. This process is designed to systematically identify each vertex of the feasible region. Once all vertices are obtained, the next step is to compute the convex hull from these vertices, which ultimately delineates the feasible region as a polygon. In the subsequent sections, we will first define the optimization problems and the conditions under which the algorithm terminates. Finally, we will provide a detailed explanation of the vertex search method process.
- 1.
Optimization method problem
Firstly, the objective function of the feasible region vertex search is determined to be:
where
is the unit direction vector for searching the new vertex;
is the variable representing the overall external feasible region of the virtual power plant, which is the point in the feasible region
.
The optimal solution of each optimization problem under different is represented by the coordination variable , which corresponds to a vertex of the feasible region.
- 2.
Stopping condition
The polygon represented by the neighborhood feasible region boundary is a collection of vertices and edges. Among the different characteristics between new vertices and original vertices, relative displacement is one of the most intuitive and effective measures. Therefore, the termination condition is set as the relative displacement of a new vertex from its corresponding original line being less than a specific value
. Let the relative displacement be
, that is:
where
is the new vertex generated at time t;
is the vertex on the clockwise side of the generated new vertex;
is the two norm of the search direction vector;
is the set termination condition.
- 3.
Algorithm procedure
The vertex search method transforms the problem of constructing the feasibility region of a VPP into an optimization problem of the VPP’s external power output. Therefore, the VPP’s output boundaries can be iteratively solved using the GUROBI solver. The process of solving the time-neighbor-feasible region based on the vertex search method is shown in
Figure 3:
Step 1: The time-neighborhood-feasible region of the solution time t is determined, and the direction vector set and the vertex set are initialized.
Step 2: belonging to different is obtained in turn and stored in the vertex set .
Step 3: The unit outer normal vector between all adjacent vertices is calculated as the direction vector of the next round of search, and the direction vector set is updated.
Step 4: The corresponding to each vertex is calculated. If the corresponding to a vertex is less than the set threshold , the outer normal vector search link determined by the vertex and the adjacent vertex is stopped. If it is greater than the set threshold , steps 2–4 are repeated until all vertices meet the termination condition.
Step 4: By solving the convex hull of each vertex, the time–domain coupling feasible region of t − 1 time and t time is obtained.
3. Lyapunov-Based VPP Global Stability Problem Transformation
In the process of characterizing the boundary of the feasible region for the VPP using the vertex search method, constraints such as those expressed in Equations (7), (9), (11), and (13) introduce time–coupling effects. Searching for the boundary at a single time point can lead to cascading changes in power output at other time points, resulting in a lack of global stability in the VPP’s power output. Therefore, it is necessary to perform wide-area temporal decoupling of the VPP to ensure global stability during the feasible region boundary search process. This paper, referencing literature [
26], employs a Lyapunov function to represent the stability of VPP power output, with the specific approach detailed below.
3.1. Construct Virtual Queue
This paper constructs virtual queues for VPP output based on the principles of Lyapunov stability analysis. These virtual queues are used to analyze the stability of the VPP, specifically by modeling the global output within the VPP.
Firstly, a virtual queue
is constructed for the VPP to reflect the cumulative offset of the VPP relative to the original operating point in the process of feasible region boundary characterization, that is:
The concept of virtual queues can be used to describe the stability of the wide-time-domain output in the VPP as the net flow value of virtual queues being zero over a certain period. This can be equivalently framed as a stability problem of the virtual queues.
3.2. Multi-Objective Problem Transformation Based on Lyapunov Function
To address the stability issues of virtual queues, this paper constructs a Lyapunov function that characterizes the congestion level of these virtual queues. This approach enables the modeling and solving of the virtual queue stability problem, leading to the development of a robust stability model for VPP [
26].
Firstly, the Lyapunov function
is constructed as
From the above discussion, it can be seen that when is small, all virtual queues experience low congestion levels, leading to better stability of the virtual queues. Conversely, when is large, at least one virtual queue will have a high congestion level, resulting in poor stability of the virtual queues. Therefore, the stability problem of VPP output can be relaxed into a problem of minimizing .
However, Equation (27) contains squared terms of the variables, transforming the original optimization problem into a Mixed-Integer Quadratically Constrained Program (MIQCP). This significantly increases the computational burden on the solver. To simplify the computation, this paper employs the principle of piecewise linearization to convert Equation (27) into piecewise lower bounds. The detailed process is described below.
where
is a square linear variable, which represents the value of
after piecewise linearization;
denotes the slope of the
kth segment;
denotes the intercept of paragraph
k;
is the piecewise linearized Lyapunov function. Through Equations (29) and (30), the original problem is transformed from finding the minimum A to taking the lower boundary of B, and the original MIQCP is transformed into a MILP problem, which greatly improves the efficiency of problem solving.
To ensure the stability of virtual queues over the entire time period, while also considering the vertex search objective function represented by Equation (20), we refer to the L-DPP function from reference [
27]. The original problem is transformed into a vertex characterization problem that considers the overall stability of virtual queues in the VPP. The detailed formulation is provided below.
By combining constraints (1)–(17), (19)–(23), (26), and (28)–(30), we formulate the multi-objective time-neighborhood-feasible region construction method proposed in this paper, which considers the full-time sequential coupling stability of the VPP.
5. Conclusions
In response to the limitations of existing methods that do not consider the stability of wide-area time–period output, this paper proposes a multi-objective feasible region search problem that incorporates Lyapunov stability indicators. By constructing a method for building a multi-objective time–domain coupled feasible region for VPPs with global stability considerations, we characterize the feasible output region of neighboring time periods for VPPs while ensuring the stability of wide-area time–period outputs.
The multi-objective time–domain coupled feasible region construction method for VPPs with global stability considerations proposed in this paper has the following characteristics:
The proposed method can accurately characterize the neighborhood output feasible region of VPPs. Based on this neighborhood feasible region, VPP operators can precisely assess the output boundaries and ramping boundaries of the VPP.
The proposed method introduces a global output stability indicator for VPPs. Through multi-objective optimization, it achieves varying degrees of decoupling between neighborhood and wide-area considerations. When characterizing the neighborhood feasible region of VPPs, this approach reduces the deviation in wide-area output, thereby ensuring global stability.
The proposed method introduces VPP revenue constraints, enabling VPP operators to effectively assess the potential revenue from regulation commands by controlling these constraints. This approach helps VPP operators make informed decisions that balance economic benefits and operational stability.
In summary, the proposed method provides a methodology for VPPs to assess the output boundaries and ramping parameters of aggregated resources. By employing the neighborhood feasible region characterization method provided in this paper, it is possible to accurately characterize the output boundaries and ramping boundaries of VPPs while ensuring the stability of wide-area outputs. This approach meets the practical needs of evaluating VPP regulation capabilities, encourages VPP operators to actively participate in the regulation market, and promotes long-term sustainable operations.
While addressing key issues in the field of VPP regulation capability assessment, this paper also has limitations. It primarily uses conventional vertex search methods to characterize the VPP’s feasible region and does not employ fixed-point methods or AC region approximation to optimize the efficiency and accuracy of characterizing the feasible region for massive resource aggregation. Additionally, this paper ignores the impact of source-load uncertainty on the boundaries of the VPP’s feasible region.
Future research should focus on designing more efficient and accurate algorithms for characterizing the feasible region, such as improving vertex search methods using fixed-point methods or combining convex polyhedron approximation with mathematical programming to accommodate massive heterogeneous distributed resources. Additionally, considering the risks of output and command response uncertainties in the process of characterizing the VPP’s feasible region will also be a key focus of future research.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}