
Grid-Forming Converter Fault Control Strategy and Its Impact on Relay Protection: Challenges and Adaptability Analysis

 , ,
, ,
Abstract
1. Introduction
- In-depth Analysis of Fault Control Strategies for Grid-Forming Converters: Conducted an in-depth analysis of the switching strategy and virtual impedance strategy for grid-forming converters, clarifying the differences in their principles and fault characteristics.
- Synthesis of Protection Impact Mechanisms: The article synthesizes existing research on the impact of converter fault response characteristics on various types of relay protection, identifying common themes and gaps in the literature.
- Investigated and prospected protection countermeasures: In response to the identified impact mechanisms, investigated and prospected countermeasures for different types of relay protection to enhance their adaptability and reliability.
- Developed a simulation verification model: Utilized PSCAD to build models to verify the fault characteristics of converters under different fault strategies, providing empirical support for the theoretical findings.
2. Control Strategies for Grid-Forming Converter
2.1. The Control Strategy of the Grid-Forming Converter During Normal Operation
2.2. Fault Strategies and Fault Characteristics of Grid-Forming Converter
2.2.1. Switching Strategy
2.2.2. Virtual Impedance Control Strategy
2.2.3. Fault Response Features
- Amplitude limitation. Regardless of the fault strategy employed during a fault, the fault current of the converter is suppressed due to the inherent characteristics of the converter itself. The short-circuit current level that a grid-forming converter can withstand is between 1 and 2 pu [13]. In the short term, inverters that comply with IEEE 1547 [16] and UL 1741 [17] standards generate fault currents approximately two to five times the rated current within 1 to 4.25 ms [18].
- Negative sequence currents induce additional losses in the power electronic devices of the converter. These losses subsequently lead to overheating and potential damage, ultimately shortening the converter’s life cycle. The method for suppressing negative sequence currents is shown in Equation (12).In the equation, and represent the reference values of the negative sequence currents on the d-axis and q-axis, respectively.
- Low-Voltage Ride-Through (LVRT) characteristics. When a short-circuit fault in the grid causes a voltage dip and if the fault strategy is a switching strategy, the reactive current injected by the new energy source into the grid should satisfy Equation (1). This would maintain voltage stability and provide reactive power support during grid voltage dips.
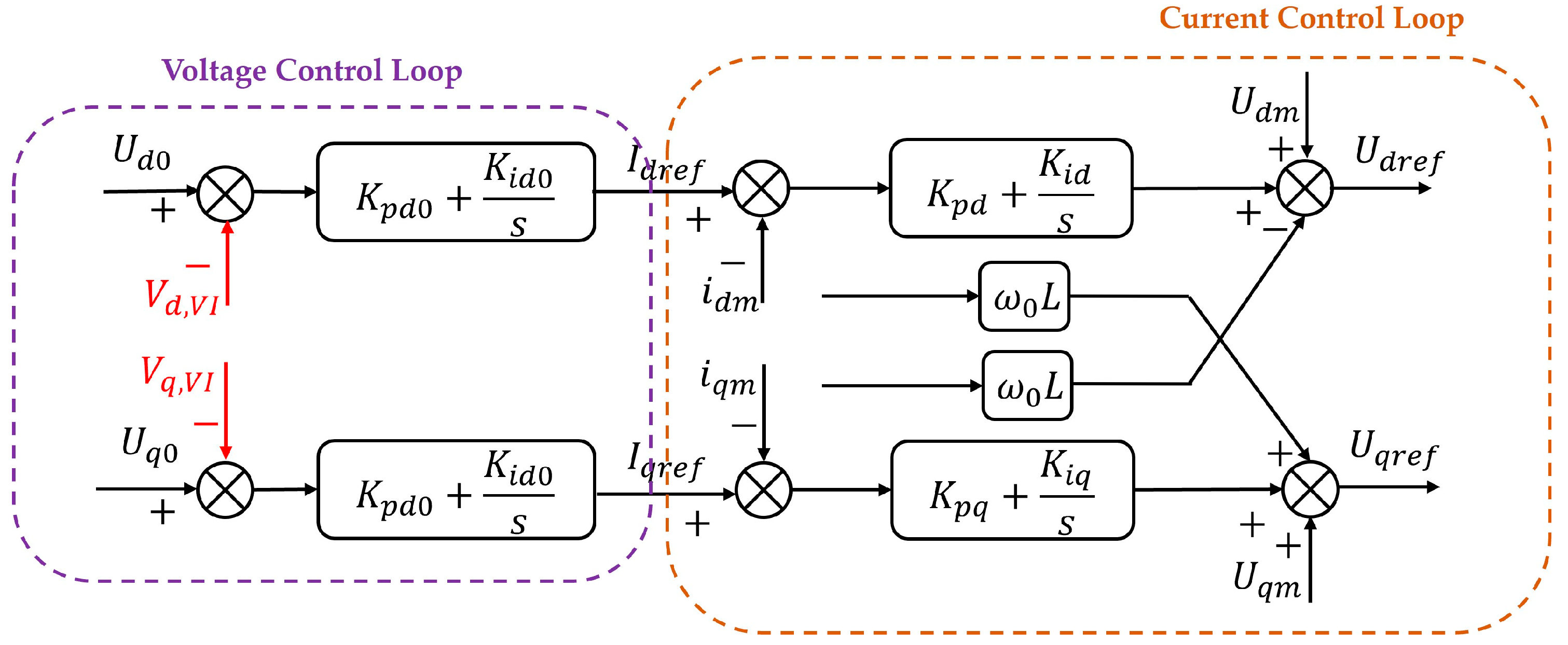
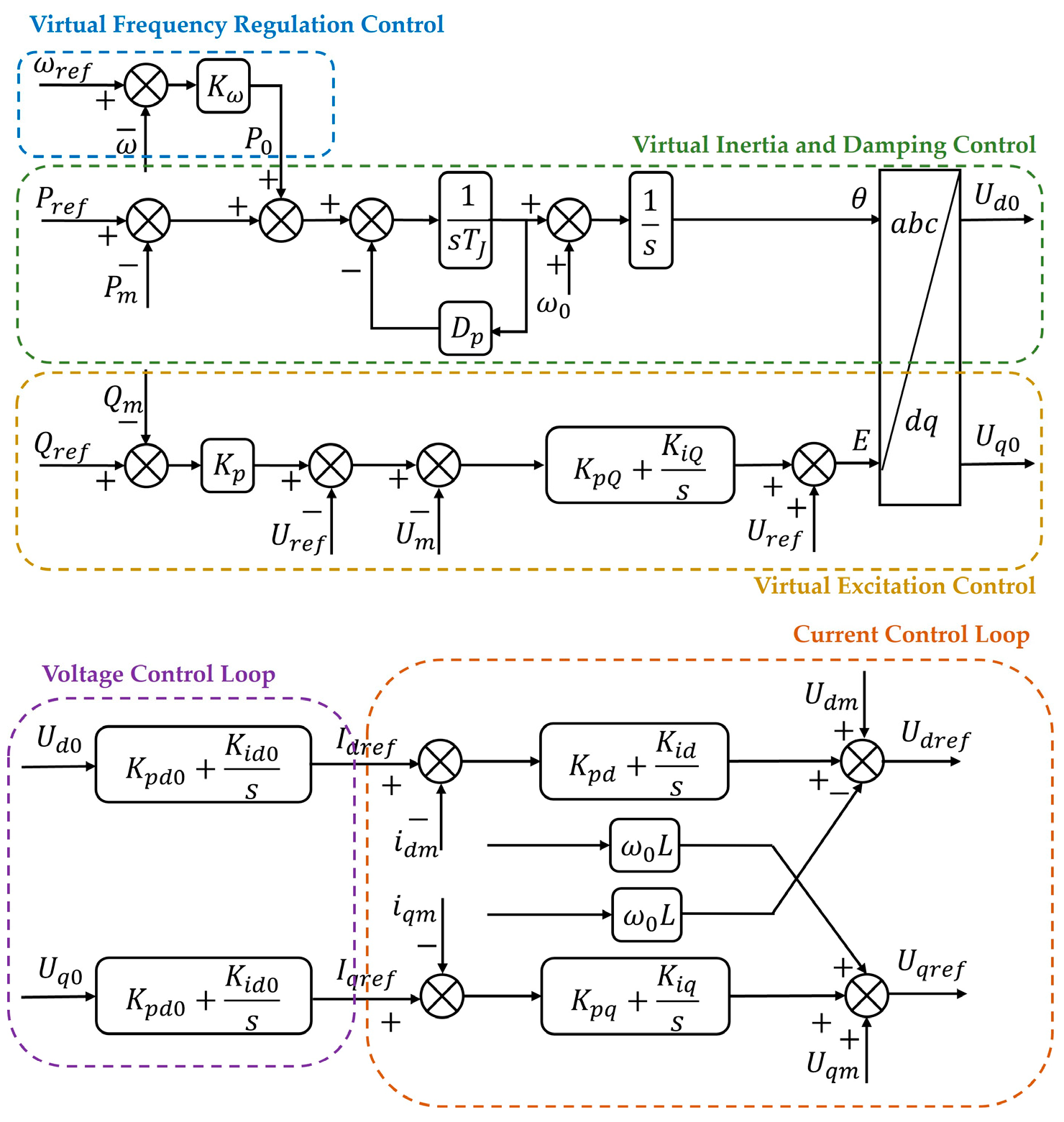
- Voltage source characteristics. VSG control regulates the output voltage through virtual excitation control; it also introduces virtual inertia and damping components and employs voltage closed-loop control. The system continuously monitors the output voltage, compares it with the reference value, and adjusts the inverter’s switching state via the controller to compensate for voltage deviations, thereby ensuring stable output voltage. Under the virtual impedance strategy, only the outer-loop voltage reference value is altered, while the voltage source characteristics remain unchanged, as shown in Figure 7.Figure 7. Dual-loop voltage and current control diagram after adding virtual impedance.
![Energies 18 02933 g007]()
- Nonlinear impedance. Under the virtual impedance strategy, the adaptively varying virtual impedance value implies that the power source side is no longer a linear impedance. The operation of protection devices will be affected by the Thevenin equivalent issue of the backside power source.
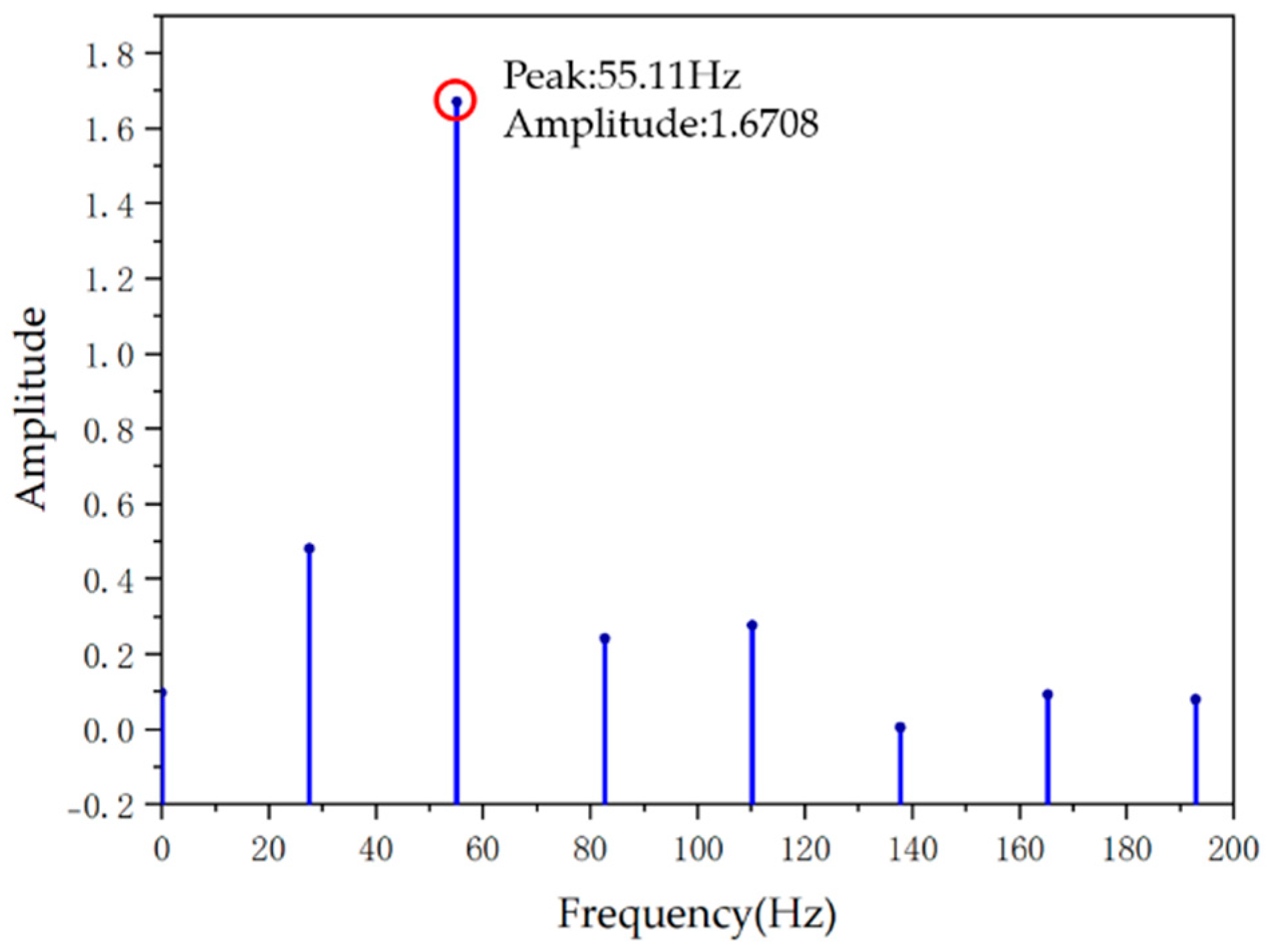
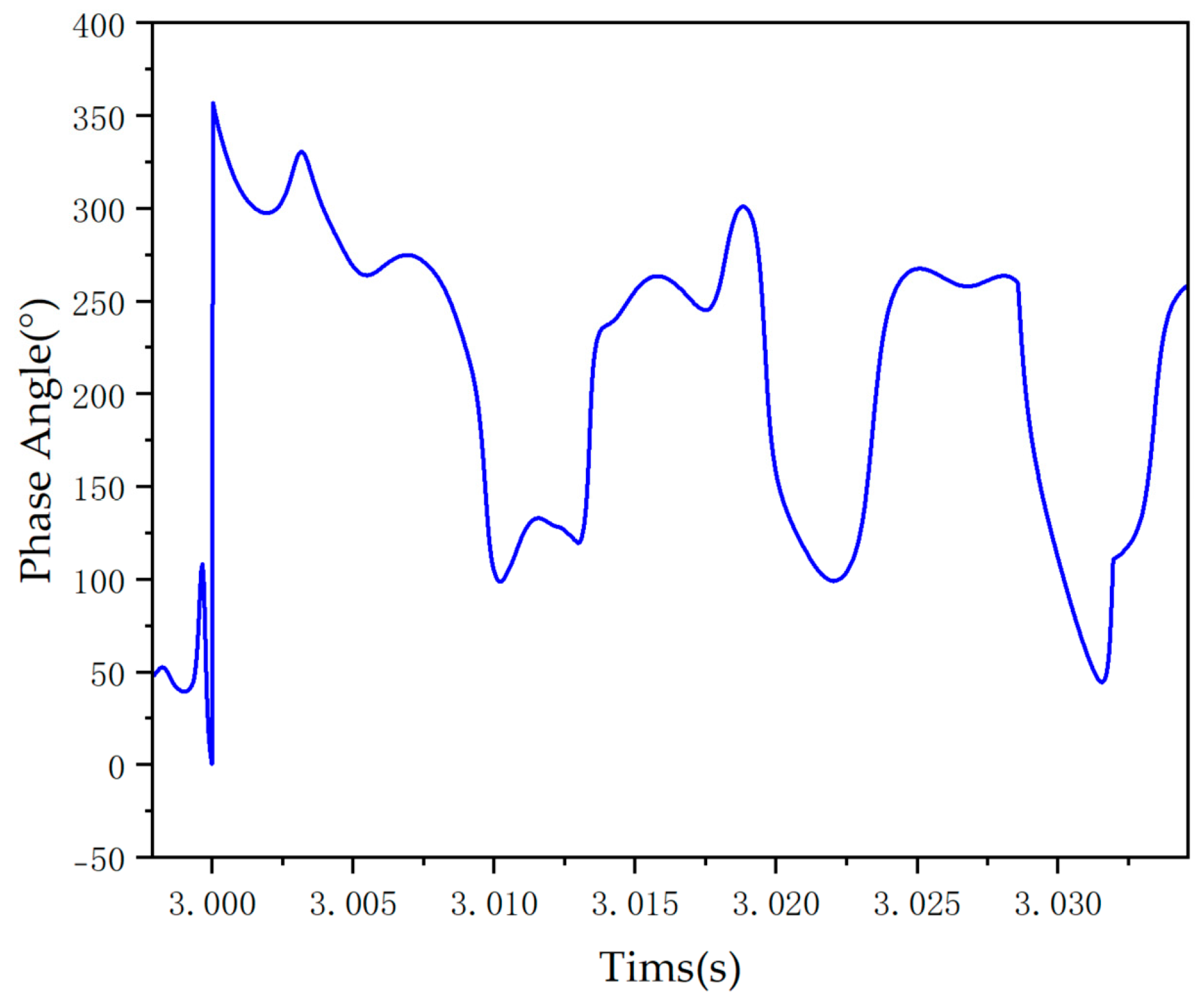
- Frequency offset. The switching strategy, due to the lag effect of the PLL tracking the abrupt phase angle and the PI regulation, can cause the problem of the system frequency deviating from the power frequency.
3. The Impact of Grid-Forming Converters on Relay Protection
3.1. Overcurrent Protection
3.2. Pilot Protection
3.3. Distance Protection
3.4. Differential Protection
4. Countermeasures for Relay Protection
4.1. Overcurrent Protection
4.2. Pilot Protection
4.3. Distance Protection
4.4. Differential Protection
5. Case Studies
5.1. Nonlinear Impedance
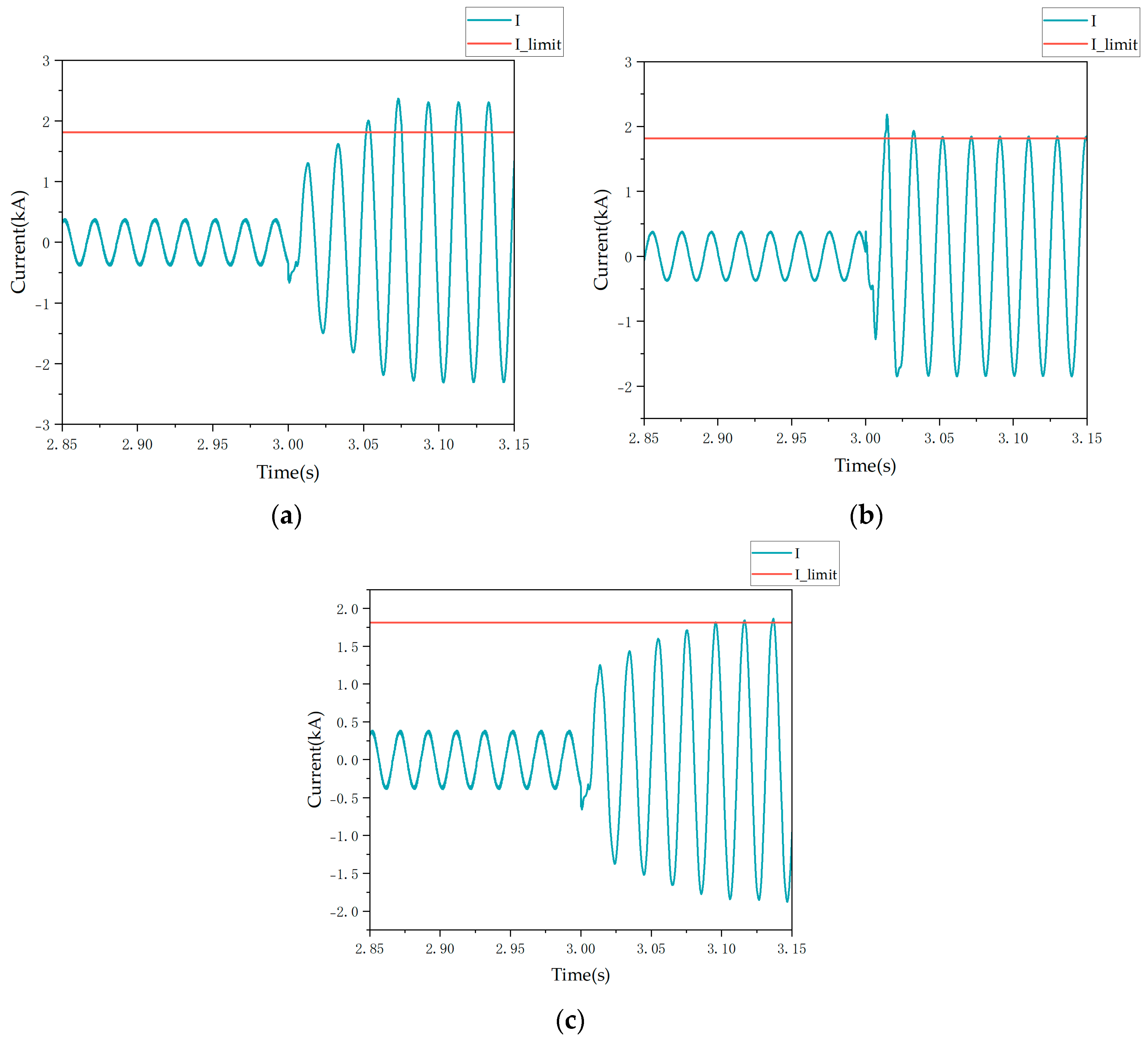
5.2. Amplitude Limitation
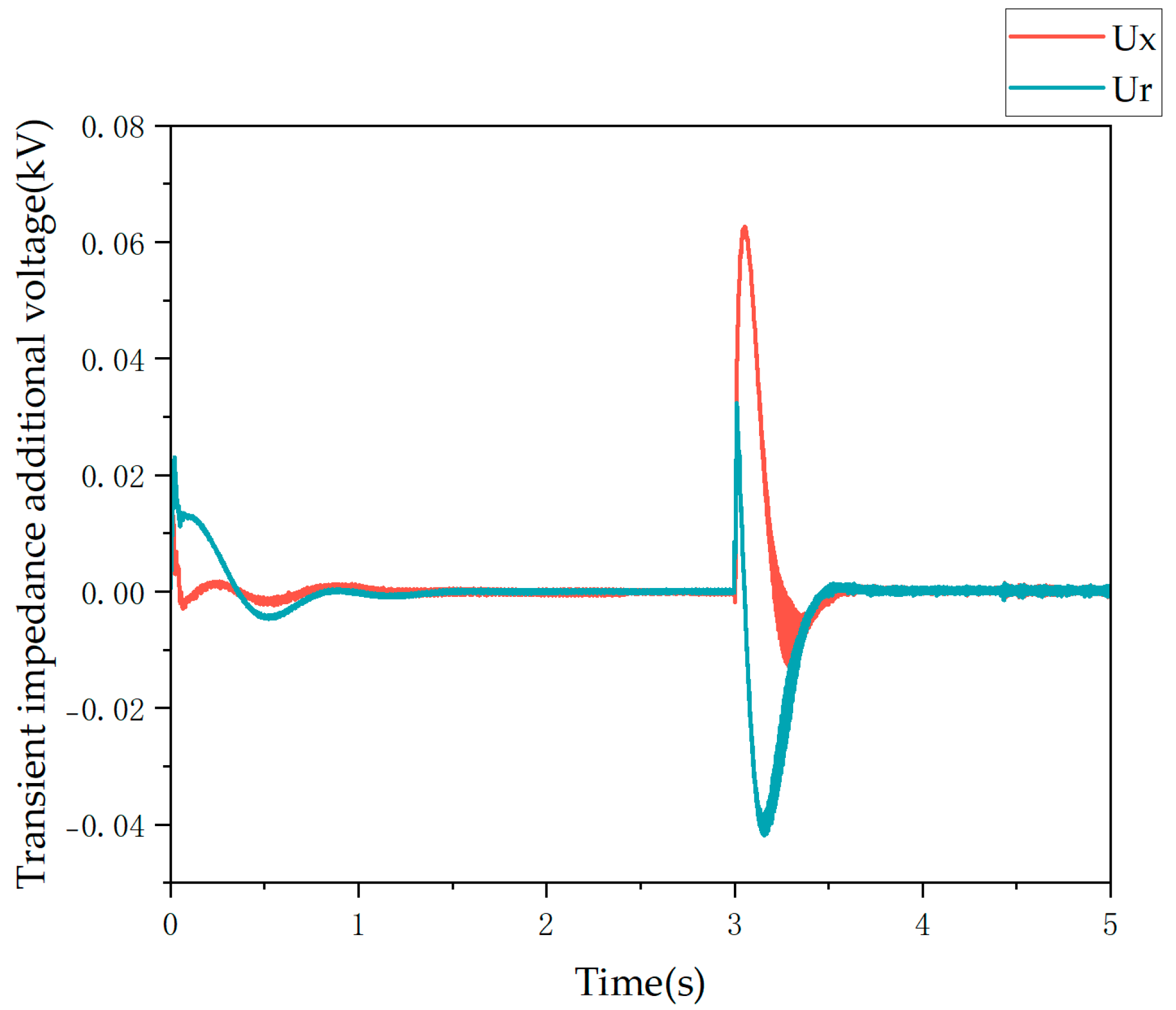
5.3. Frequency Offset
6. Conclusions
- Both fault strategies exhibit negative sequence suppression and limited amplitude fault characteristics. However, the virtual impedance strategy results in a smoother current waveform during faults, without surge currents, and offers a more flexible adjustment of fault current. The switching strategy causes frequency offset, which the virtual impedance strategy can mitigate while maintaining the voltage source characteristic, although it introduces nonlinear impedance on the renewable energy side.
- The limited amplitude of fault current renders Overcurrent Protection Zones I and II inoperative and reduces the sensitivity of Zone III, while zero and negative sequence suppression strategies affect the performance of zero and negative sequence current protection. The non-power frequency characteristics of the fault waveform from grid-forming converters mean that the current phasors calculated using the traditional full-cycle Fourier algorithm do not reflect the true fault characteristics, leading to significant errors in directional element calculations and thus affecting the reliability of pilot protection. The limited fault current amplitude and changes in short-circuit current phase angle make distance protection on the renewable energy side prone to failure or misoperation while reducing the probability of failure on the system side. The nonlinearity and frequency offset characteristics of virtual impedance affect the accuracy of power frequency fault component distance protection. The switching current-limiting control strategy destabilizes the phase of fault current, and the virtual impedance control strategy introduces a nonlinear relationship between voltage and current at the point of common coupling, both of which increase the risk of incorrect operation of differential protection.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VSG | Virtual Synchronous Generator |
| PLL | Phase-Locked Loop |
| VCO | Voltage-Controlled Oscillator |
| PI | Proportional Integral |
| LVRT | Low-Voltage Ride-Through |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter Names | Values |
|---|---|---|
| PV1 | Rated Capacity | 4 MVA |
| Base frequency | 50 Hz | |
| DC Bus Rated Voltage/Capacitance | 0.67 kV/10,000 μF | |
| LCL filter Valve-Side Inductance | H | |
| LCL filter Valve-Side Inductance and Grid-Side Inductance | H | |
| LCL filter Resistance | 0.1 Ω | |
| LCL filter Capacitance | 400 μF | |
| Frequency droop slope | 50 | |
| Damping coefficient | 20 | |
| Moment of inertia | 0.84 kg·m2 | |
| Voltage droop slope | 0.1 | |
| Reactive power–voltage loop PI Parameters | 0.02 pu/0.2 pu | |
| Inverter Voltage Loop PI Parameters | 0.4 pu/0.1 pu | |
| Inverter Current Loop PI Parameters | 2 pu/0.006 pu | |
| Nominal virtual resistance | 0.0707 pu | |
| Nominal virtual inductance | 0.0707/(2π50) pu | |
| Current limiting max current setting | 1.2 pu | |
| Current limiting threshold | 1 pu | |
| Virtual resistance current limiting proportional gain | 0.1 pu | |
| Current limiting virtual impedance X/R ratio | 10 | |
| PV2 | Rated Capacity | 2 MVA |
| DC Bus Rated Voltage/Capacitance | 0.82 kV/10,000 μF | |
| RLC Filter Parameters | 0.1 ohm/150 μH/400 μF | |
| LCL filter Valve-Side Inductance | H | |
| LCL filter Valve-Side Inductance and Grid-Side Inductance | H | |
| LCL filter Resistance | 0.1 Ω | |
| LCL filter Capacitance | 400 μF | |
| PLL PI Parameters | 50 pu/0.0001 pu | |
| Transmission Line | Line 1/2/3/4/5 length | 1 km |
| Positive sequence resistance | 0.02 Ω/km | |
| Positive sequence inductance | 1.273 mH/km | |
| Positive sequence capacitance | 0.351 μF/Km | |
| Zero sequence resistance | 2.0 Ω/km | |
| Zero sequence inductance | 1.019 μH/km | |
| Zero sequence capacitance | 1 μF/Km | |
| TV1 | Three-Phase Transformer Capacity | 4.2 MVA |
| Winding #1 Type | Y | |
| Winding #2 Type | Delta | |
| Voltage transformation ratio | 0.27 kV/35 kV | |
| TV2 | Three-Phase Transformer Capacity | 6 MVA |
| Winding #1 Type | Delta | |
| Winding #2 Type | Y | |
| Voltage transformation ratio | 35 kV/110 kV | |
| TV3 | Three-Phase Transformer Capacity | 6 MVA |
| Winding #1 Type | Y | |
| Winding #2 Type | Y | |
| Voltage transformation ratio | 0.27 kV/35 kV | |
| Load1 | Load size | 0.5 MW |
| Load2 | Load size | 1.7 MW |
| Simulation Environment | Sampling rates | 24 kHz |
| Solution time step | 41.667 μs |
References
- Guo, X.; Liu, Y.; Yu, W.; Xing, Z.; Zheng, H.; Liang, Y.; Yuan, Y.; Xu, Q. Analysis and Improvement Method of Over Current Direction Element in Doubly-Fed Wind Farm. In Proceedings of the 2024 3rd Asia Power and Electrical Technology Conference (APET), Shanghai, China, 15–17 October 2024; pp. 701–707. [Google Scholar]
- Jalali, A.; Farahani, E.; Delac, M.; Modi, N. Impact of Grid-Forming Inverters on Frequency Control of a Grid with High Share of Inverter-Based Resources. In Proceedings of the CAIRNS International Symposium, Cairns, Australia, 4–7 September 2023; pp. 1–13. [Google Scholar]
- Jongudomkarn, J.; Liu, J.; Ise, T. Virtual synchronous generator control with reliable fault ride-through ability: A solution based on finite-set model predictive control. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 3811–3824. [Google Scholar] [CrossRef]
- Bottrell, N.; Green, T.C. Comparison of current-limiting strategies during fault ride-through of inverters to prevent latch-up and wind-up. IEEE Trans. Power Electron. 2013, 29, 3786–3797. [Google Scholar] [CrossRef]
- Lin, X.; Zheng, Y.; Liang, Z.; Kang, Y. The suppression of voltage overshoot and oscillation during the fast recovery process from load short-circuit fault for three-phase stand-alone inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 858–871. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Q.; Wu, D.; Yan, B.; Zhang, J. Advanced current-droop control for storage converters for fault ride-through enhancement. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 2461–2474. [Google Scholar] [CrossRef]
- Li, Z.; Chan, K.W.; Hu, J.; Or, S.W. An adaptive fault ride-through scheme for grid-forming inverters under asymmetrical grid faults. IEEE Trans. Ind. Electron. 2021, 69, 12912–12923. [Google Scholar] [CrossRef]
- Etemadi, A.H.; Iravani, R. Overcurrent and overload protection of directly voltage-controlled distributed resources in a microgrid. IEEE Trans. Ind. Electron. 2012, 60, 5629–5638. [Google Scholar] [CrossRef]
- Denis, G.; Prevost, T.; Debry, M.S.; Xavier, F.; Guillaud, X.; Menze, A. The Migrate project: The challenges of operating a transmission grid with only inverter-based generation. A grid-forming control improvement with transient current-limiting control. IET Renew. Power Gener. 2018, 12, 523–529. [Google Scholar] [CrossRef]
- Peralta, C.L.; Villegas Pico, H.N. Impact of grid-forming converters on distance elements based on the x and m calculations. In Proceedings of the 2024 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 12–13 February 2024; pp. 1–6. [Google Scholar]
- Peng, F.; Gao, H.; Guo, Y.; Fang, Y.; Song, H.; Luo, R.; Xu, B. A Review of Fault Ride-through Control Strategies of Grid-forming Inverter-based Resources and the Influence on Protection. Power Syst. Technol. 2024, 48, 3673–3685. [Google Scholar]
- Rathnayake, D.B.; Akrami, M.; Phurailatpam, C.; Me, S.P.; Hadavi, S.; Jayasinghe, G.; Zabihi, S.; Bahrani, B. Grid Forming Inverter Modeling, Control, and Applications. IEEE Access 2021, 9, 114781–114807. [Google Scholar] [CrossRef]
- Jia, J.; Yang, G.; Nielsen, A.H.; Jia, J.; Yang, G.; Nielsen, A.H. A review on grid-connected converter control for short-circuit power provision under grid unbalanced faults. IEEE Trans. Power Deliv. 2017, 33, 649–661. [Google Scholar] [CrossRef]
- Paquette, A.D.; Divan, D.M. Virtual impedance current limiting for inverters in microgrids with synchronous generators. IEEE Trans. Ind. Appl. 2014, 51, 1630–1638. [Google Scholar] [CrossRef]
- Li, Y.; Wu, H.; Wang, X. A Protection-Interoperable Fault Ride-Through Control for Grid-Forming Inverters. arXiv 2025, arXiv:2504.21592. [Google Scholar]
- IEEE Std 1547™-2018; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Electric Power Systems. IEEE: New York, NY, USA, 2018.
- Underwriters Laboratories (UL) UL 1741; Standard for Inverters, Converters, Controllers, and Interconnection System Equipment for Use with Distributed Energy Resources. Underwriters Laboratories Inc.: Northbrook, IL, USA, 2020.
- Keller, J.; Kroposki, B. Understanding Fault Characteristics of Inverter-Based Distributed Energy Resources; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Bu, M.; Zhang, J.; Zhou, H.; Zheng, T. Improved Fault Ride-Through Control Strategy for Grid-Forming Inverters to Enhance Adaptability of Distance Protection. In Proceedings of the 2024 3rd Asia Power and Electrical Technology Conference (APET), Fuzhou, China, 15–17 November 2024; pp. 361–366. [Google Scholar]
- Li, Z.; Zhu, Y.; Hu, C.; Tan, H.; Weng, H.; Li, Z. Optimal negative sequence current suppression strategy without phase-locked loop based on the control of clustered new energy power stations. IET Gener. Transm. Distrib. 2023, 17, 4248–4257. [Google Scholar] [CrossRef]
- Fang, Y.; Jia, K.; Yang, Z.; Li, Y.; Bi, T. Impact of inverter-interfaced renewable energy generators on distance protection and an improved scheme. IEEE Trans. Ind. Electron. 2018, 66, 7078–7088. [Google Scholar] [CrossRef]
- Liu, D.; Hong, Q.; Khan, M.A.U.; Dyśko, A.; Alvarez, A.E.; Booth, C. Evaluation of grid-forming converter’s impact on distance protection performance. In IET Conference Proceedings CP800; The Institution of Engineering and Technology: Stevenage, UK, 2022; Volume 2022, pp. 285–290. [Google Scholar]
- Baeckeland, N.; Venkatramanan, D.; Dhople, S.; Kleemann, M. On the distance protection of power grids dominated by grid-forming inverters. In Proceedings of the 2022 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Novi Sad, Serbia, 10–12 October 2022; pp. 1–6. [Google Scholar]
- Johansson, H.; Xing, Q.; Taylor, N.; Wang, X. Impacts of grid-forming inverters on distance protection. IET Gener. Transm. Distrib. 2025, 19, e13354. [Google Scholar] [CrossRef]
- Baeckeland, N.; Chatterjee, D.; Lu, M.; Johnson, B.; Seo, G.-S. Overcurrent limiting in grid—Forming inverters: A comprehensive review and discussion. IEEE Trans. Power Electron. 2024, 39, 14493–14517. [Google Scholar] [CrossRef]
- Huang, L.; Wu, C.; Zhou, D.; Blaabjerg, F. A power-angle-based adaptive overcurrent protection scheme for grid-forming inverter under large grid disturbances. IEEE Trans. Ind. Electron. 2022, 70, 5927–5936. [Google Scholar] [CrossRef]
- Li, B.; Liu, J.; Wang, X.; Zhao, L. Fault studies and distance protection of transmission lines connected to DFIG-based wind farms. Appl. Sci. 2018, 8, 562. [Google Scholar] [CrossRef]
- Peralta, C.L.; Pico, H.N.V. A time-domain protection approach for AC transmission systems with grid-forming resources. IEEE Trans. Instrum. Meas. 2023, 73, 9000318. [Google Scholar] [CrossRef]
- Wang, L.; Cheng, L.; Hu, Y. Action Behavior Analysis of Current Transformer Position and Dead-zone Fault Protection. Sichuan Electr. Power Technol. 2022, 45, 40–44. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Yao, J.; Chen, W.; Zhou, W.; Zhou, Z.; Wang, H.; Jiang, Z.; Dai, W.; Wang, Z. Grid-Forming Converter Fault Control Strategy and Its Impact on Relay Protection: Challenges and Adaptability Analysis. Energies 2025, 18, 2933. https://doi.org/10.3390/en18112933
Li X, Yao J, Chen W, Zhou W, Zhou Z, Wang H, Jiang Z, Dai W, Wang Z. Grid-Forming Converter Fault Control Strategy and Its Impact on Relay Protection: Challenges and Adaptability Analysis. Energies. 2025; 18(11):2933. https://doi.org/10.3390/en18112933
Chicago/Turabian StyleLi, Xiaopeng, Jiaqi Yao, Wei Chen, Wenyue Zhou, Zhaowei Zhou, Hao Wang, Zhenchao Jiang, Wei Dai, and Zhongqing Wang. 2025. "Grid-Forming Converter Fault Control Strategy and Its Impact on Relay Protection: Challenges and Adaptability Analysis" Energies 18, no. 11: 2933. https://doi.org/10.3390/en18112933
APA StyleLi, X., Yao, J., Chen, W., Zhou, W., Zhou, Z., Wang, H., Jiang, Z., Dai, W., & Wang, Z. (2025). Grid-Forming Converter Fault Control Strategy and Its Impact on Relay Protection: Challenges and Adaptability Analysis. Energies, 18(11), 2933. https://doi.org/10.3390/en18112933