
Investigation of Frequency Response Sharing-Induced Power Oscillations in VSC-HVDC Systems for Asynchronous Interconnection

Abstract
1. Introduction
- (1)
- A state-space model of the asynchronously interconnected system, incorporating the effects of frequency control in the VSC-HVDC system, is developed. The developed model serves as the foundation for analyzing the damping characteristics of low-frequency power oscillations LFPOs.
- (2)
- The nature of the LFPO observed in practical HVDC systems originates from the interaction between the frequency controller and the machine dynamic of SGs. The parameters of the frequency control are identified as the primary influencing factors. In addition, the damping contributions from both the turbine and governor of SGs and the DC voltage-controlled VSC station are examined.
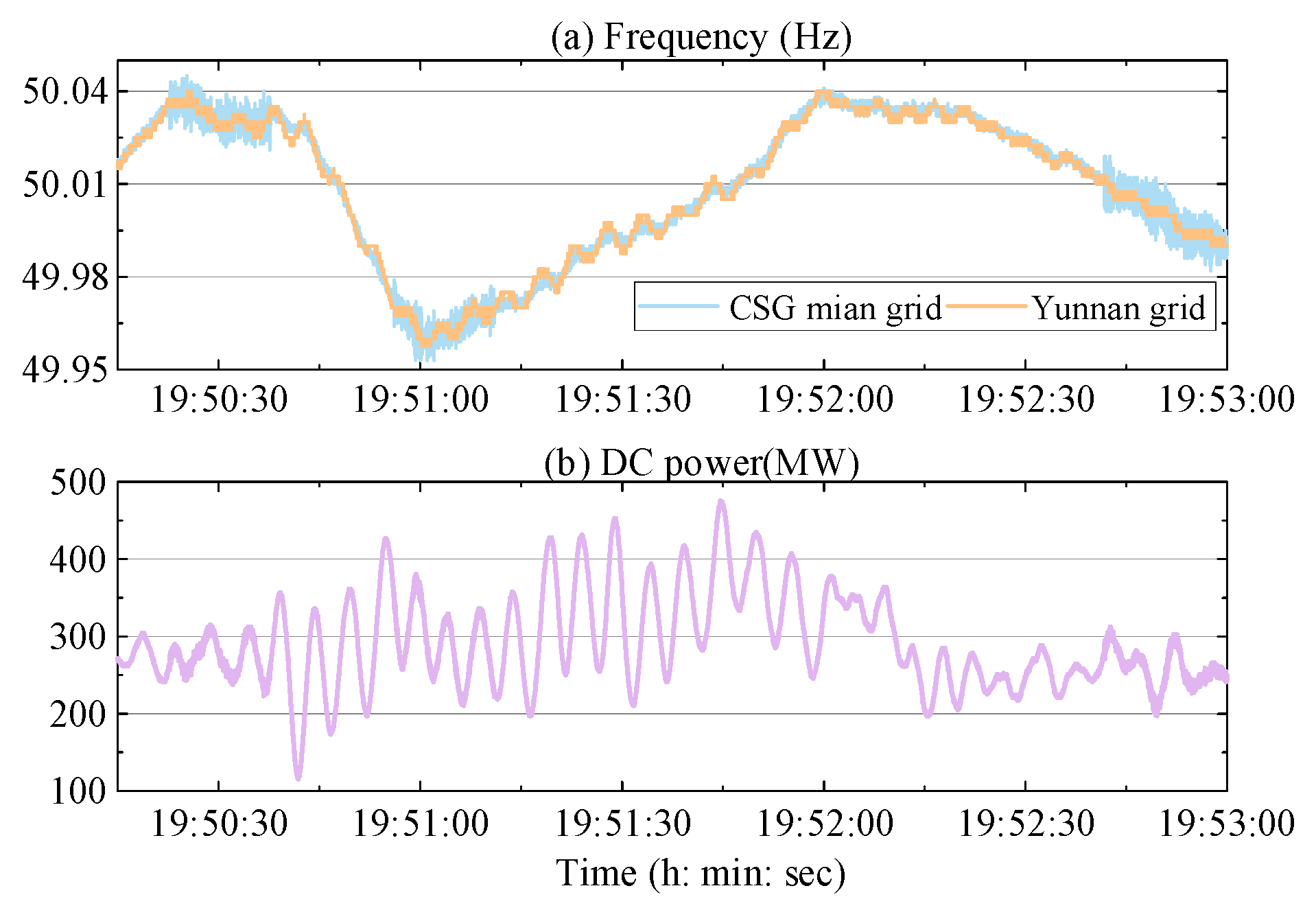
2. LFPO Report
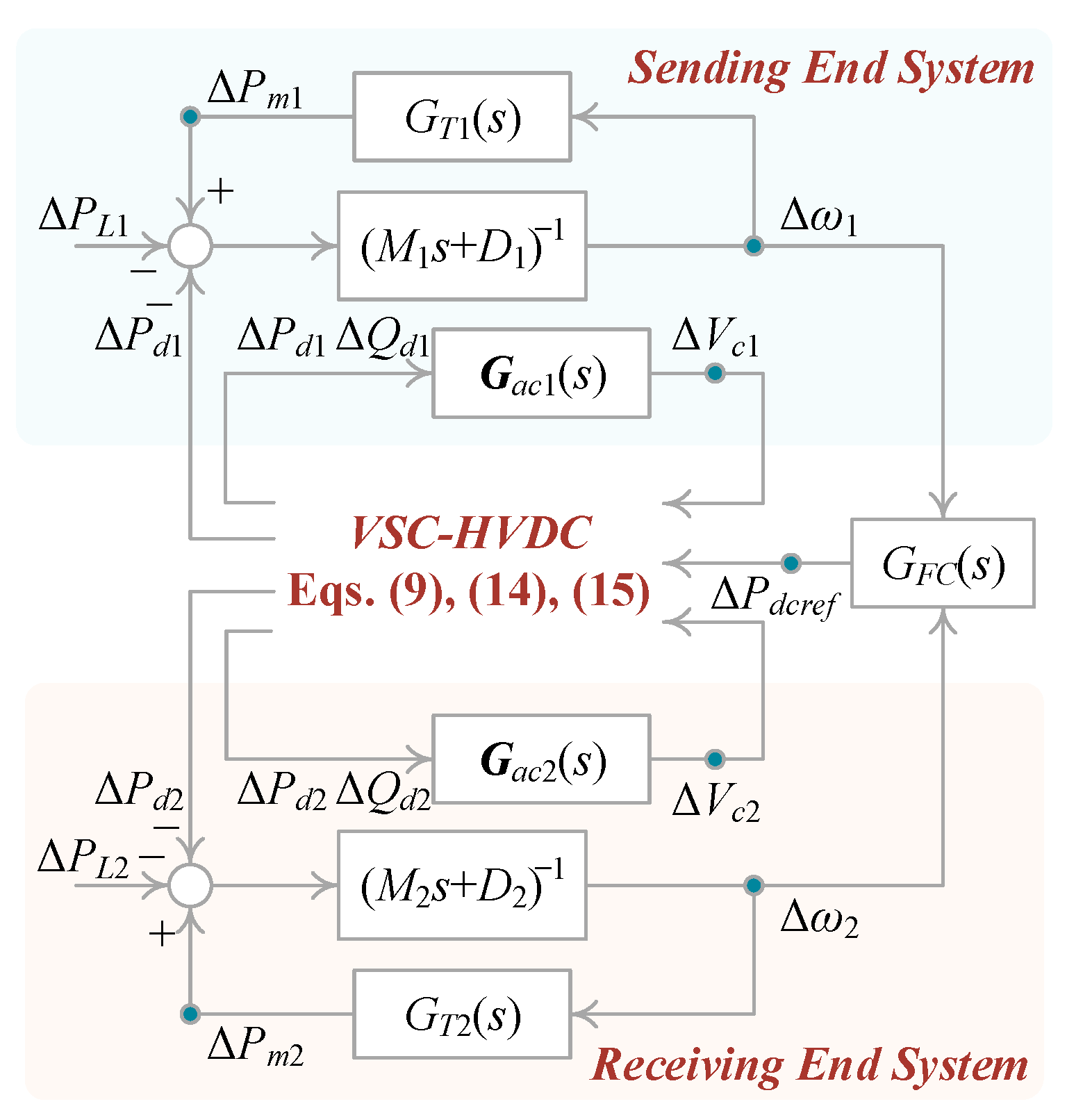
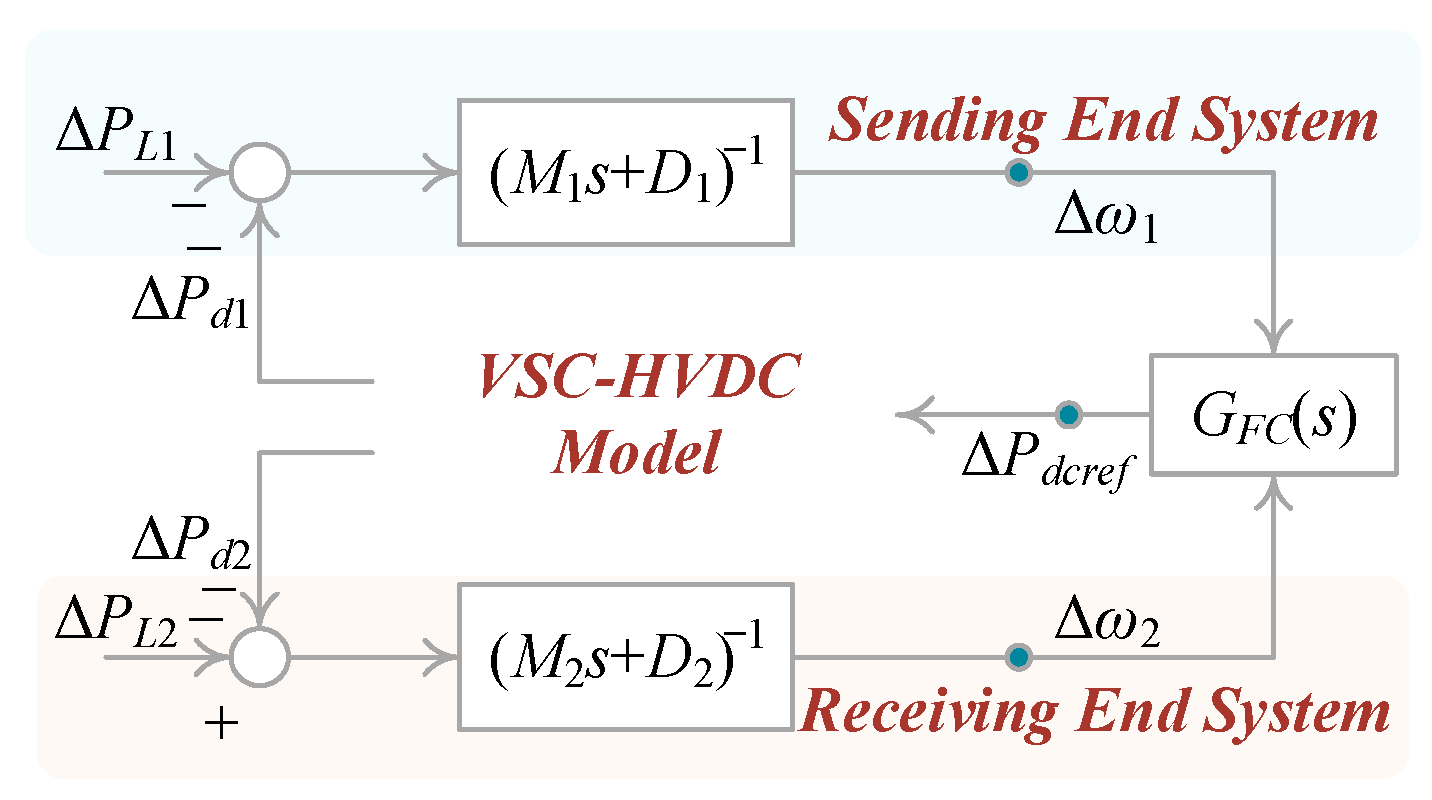
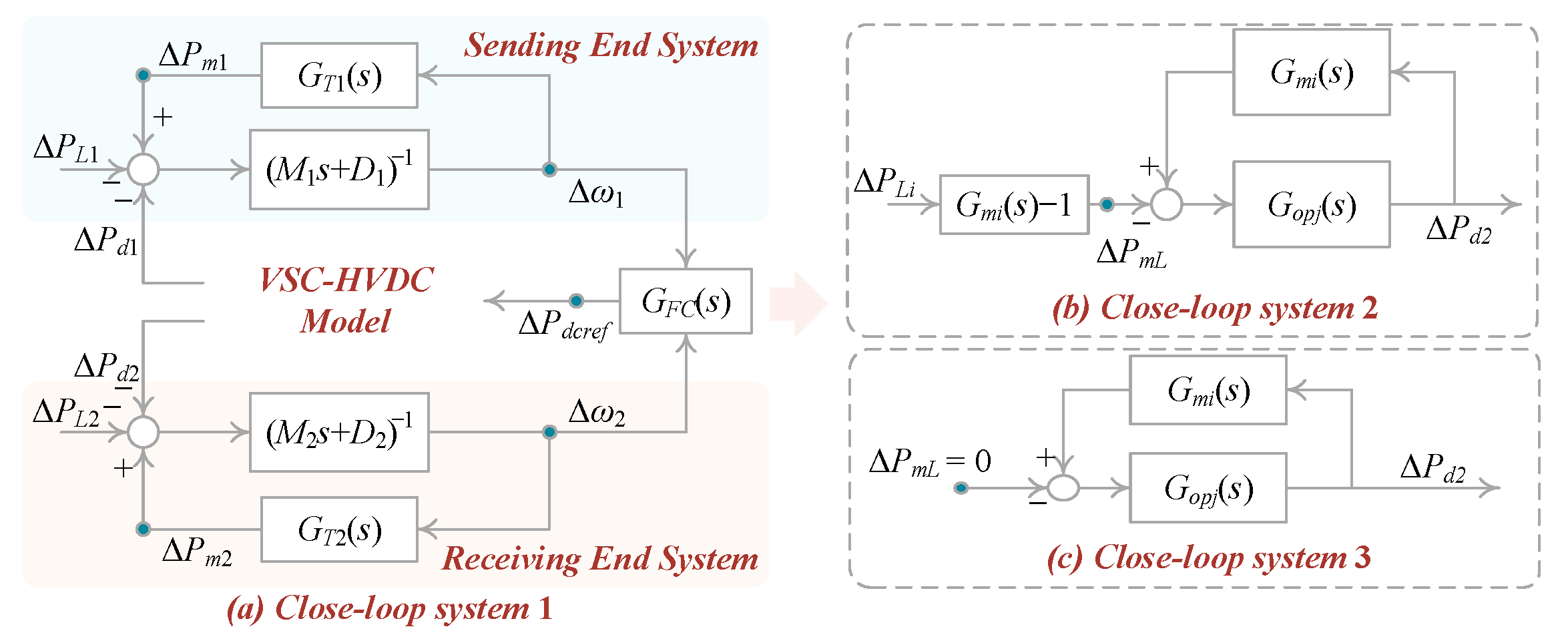
3. System Modeling
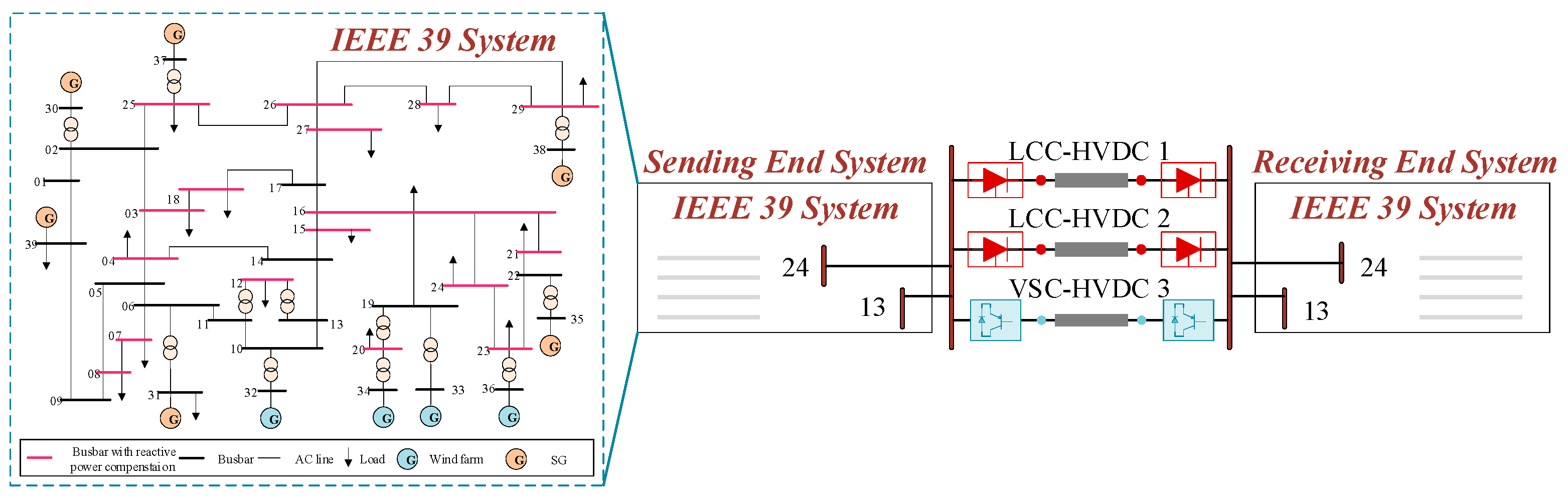
- Two asynchronous grids, i.e., the Yunnan grid and the CSG main grid, are equivalently represented by two SGs, and the AC transmission lines are assumed to be purely inductive.
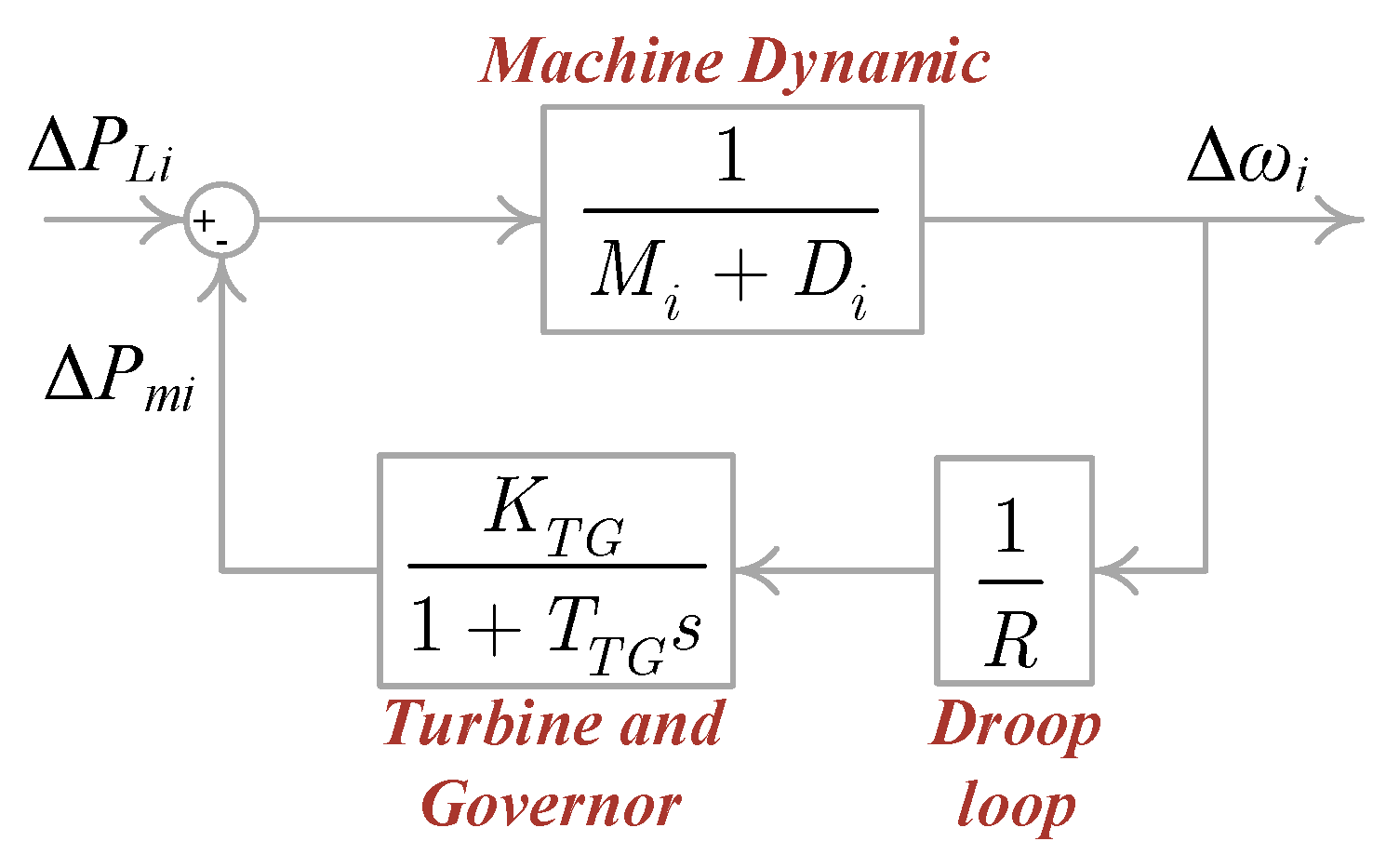
- The damping effects of the machine field circuit, AVR, and PSS are lumped into the damping coefficients Di.
- The AC voltage at the machine terminal of the SGs is assumed to remain constant, and the frequency response of the SG is only determined by the swing equation, governor, and turbine [26].
- The parallel LCC-HVDC systems are equivalently modeled as constant power loads since these LCC-HVDC systems operate in constant power mode.
- The VSC station is assumed to be lossless, and the inner current control loop is ideal, i.e., idrefi = idi.
3.1. Modeling of DC Voltage Controlled-VSC 1
3.2. Modeling of Active Power Controlled-VSC 2
3.3. Modeling of Asynchronous AC Gird
4. Damping Analysis
4.1. The Nature of the LFPO Mode
- (1)
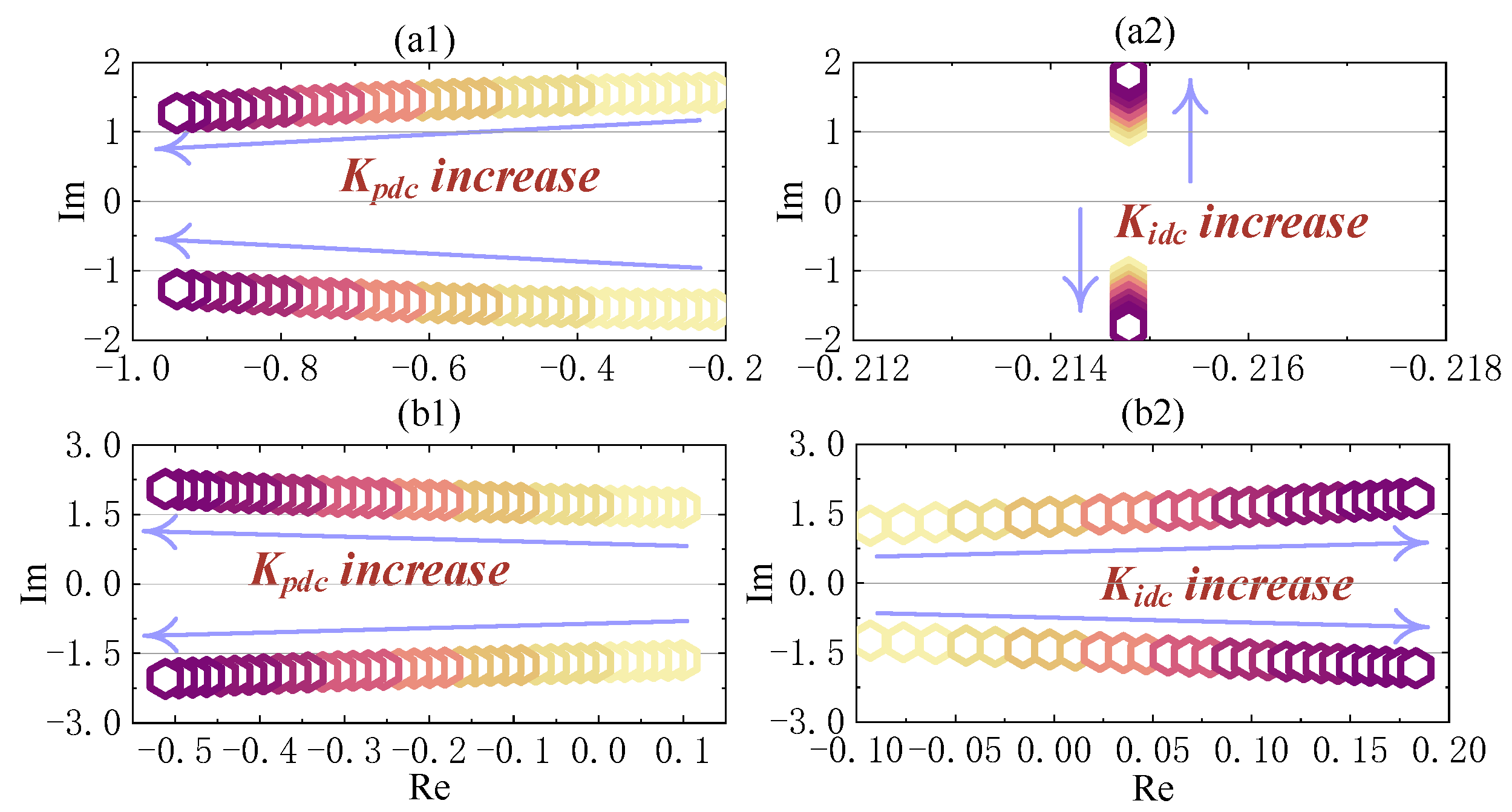
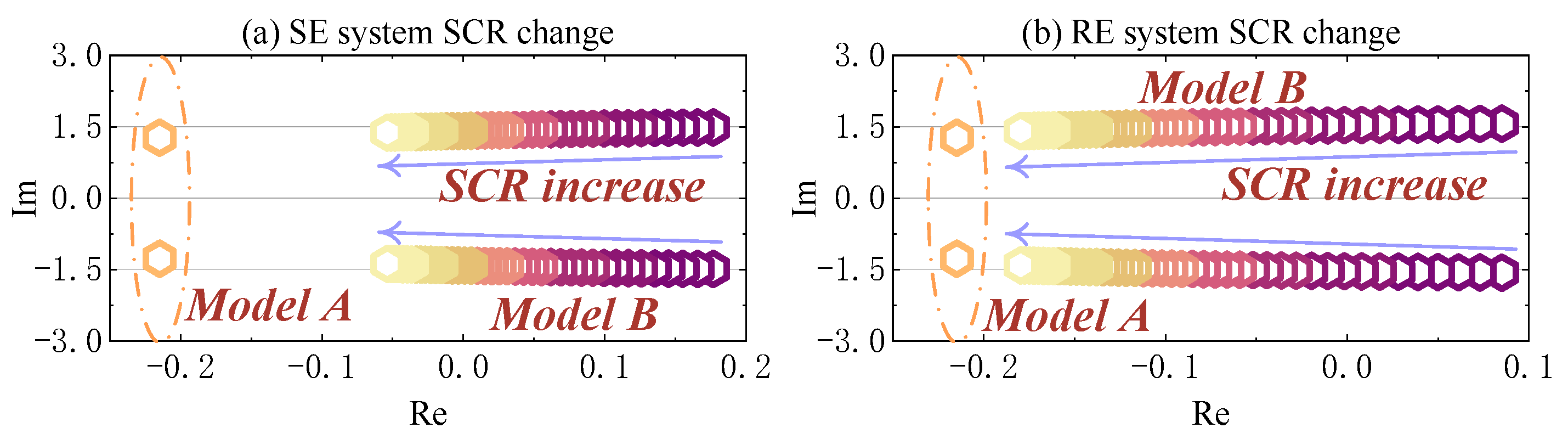
- The damping coefficient and angular frequency of the LFPO mode are determined by the equivalent inertia and damping coefficients of the asynchronously interconnected systems, as well as the proportional and integral gains of the co-frequency control. Since these parameters are related to the SGs at both ends of the AC systems and the co-frequency controller, it can be concluded that this frequency response sharing-induced LFPO is caused by the interaction between the swing dynamics of the SGs and the co-frequency control.
- (2)
- The damping coefficient of the LFPO mode is positively related to the proportional coefficient Kpdc, and the angular frequency of this mode is positively related to the integral coefficient Kidc. Therefore, by properly increasing Kpdc while decreasing Kidc, the damping ratio of the LFPO model can be effectively improved.
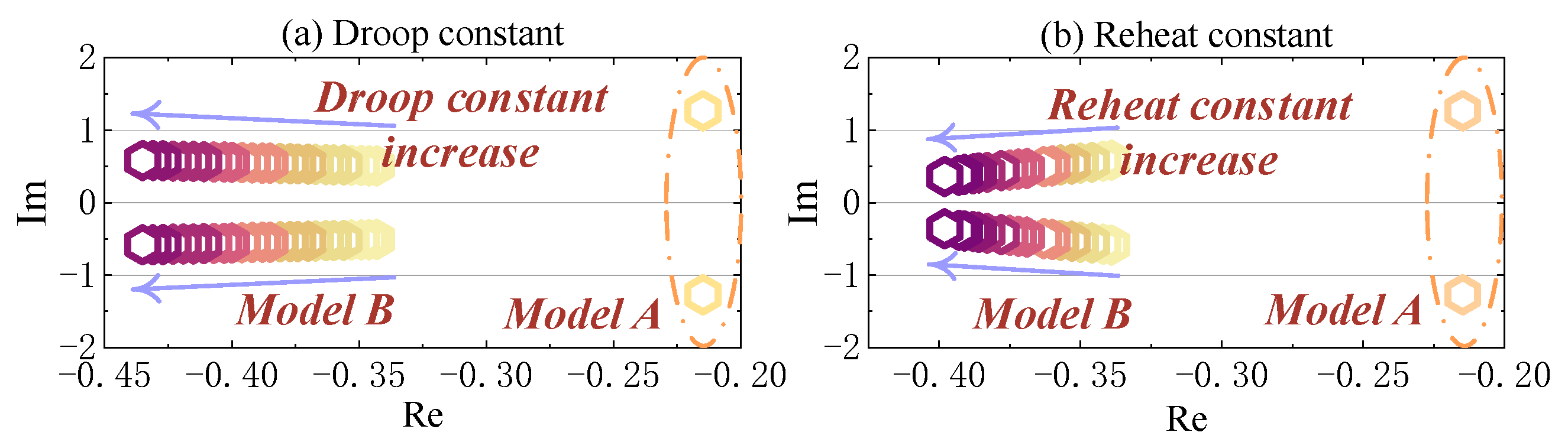
4.2. The Damping Contribution from the Governor and Turbine
4.3. The Damping Contribution from the VSC 1
5. Simulation Validation
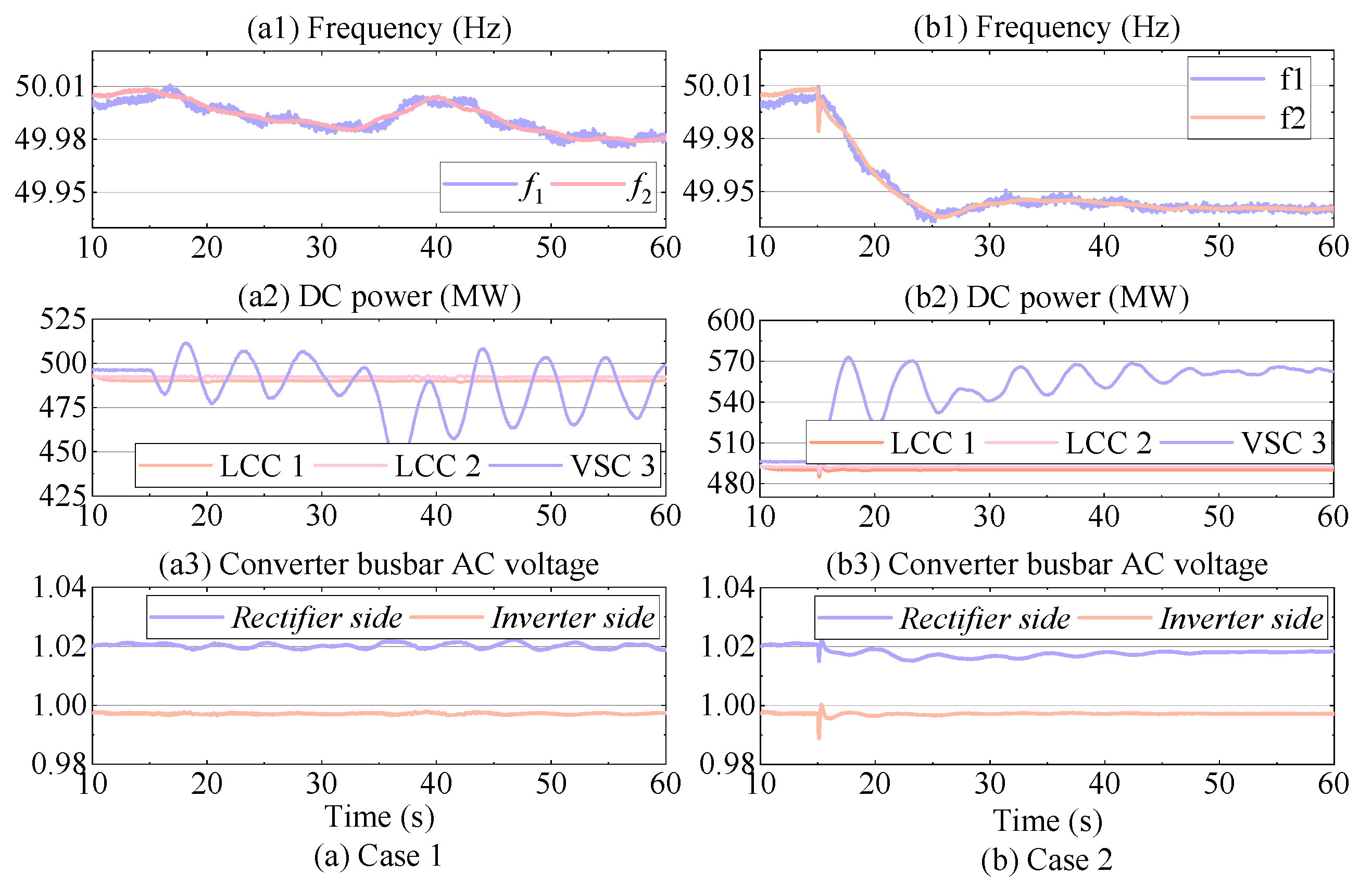
5.1. LFPO Replication
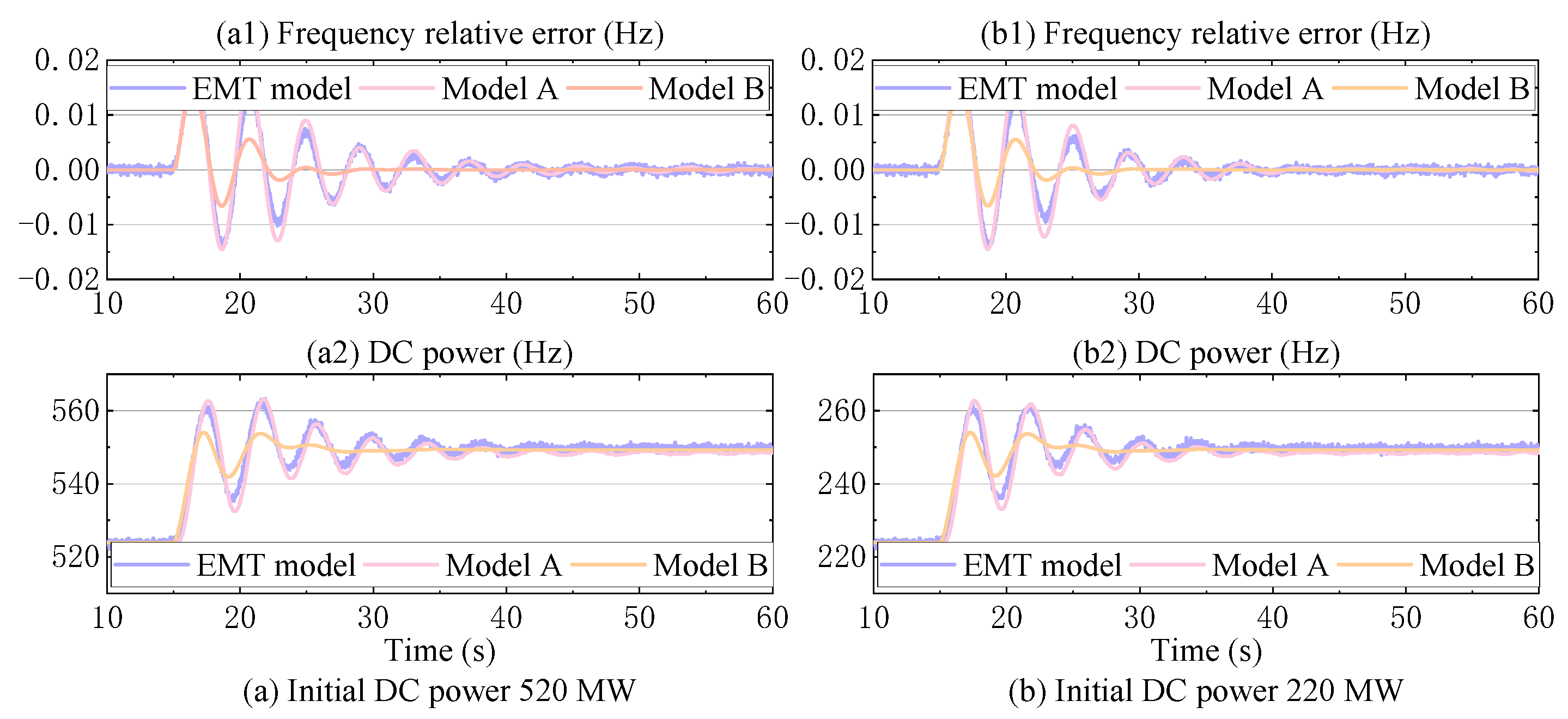
5.2. Model Validation and Parameters Effect Analysis
5.3. Damping Analysis Validation
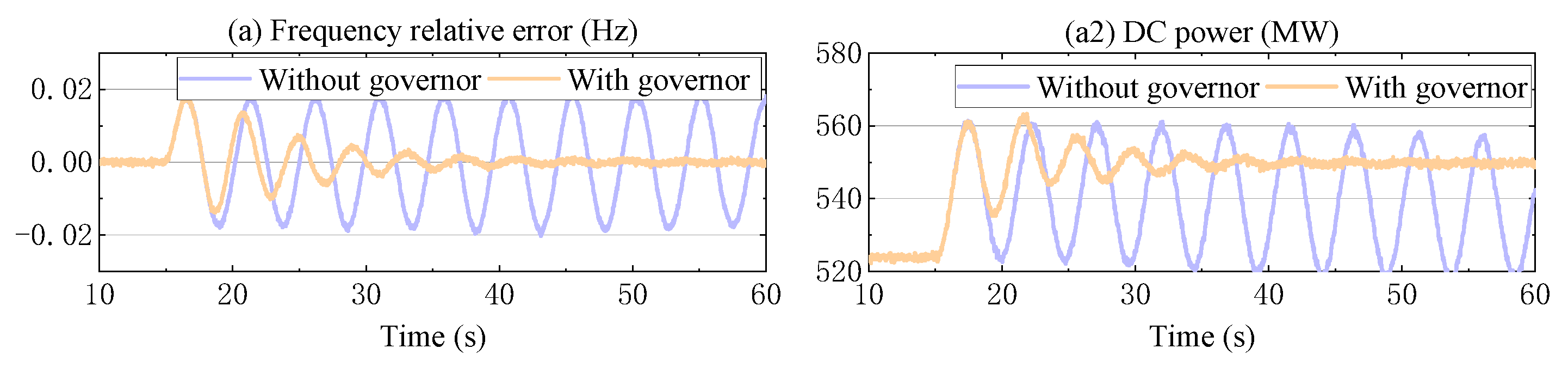
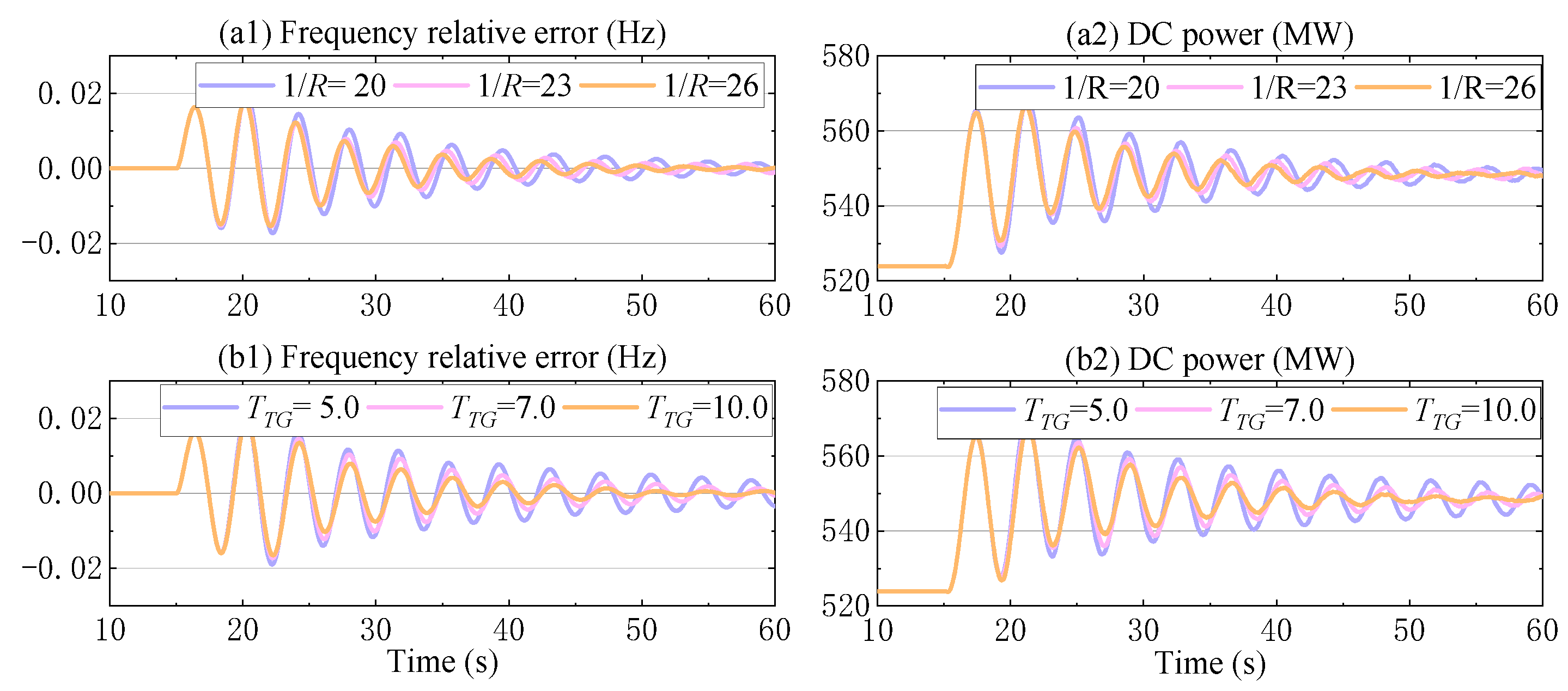
5.3.1. Damping Effect of Turbine and Governor
5.3.2. Damping Effect of the VSC 1
5.4. Discussion
- Determine the system operating conditions, including the equivalent system inertia, damping coefficient, short-circuit ratio (SCR), and HVDC system parameters.
- Predefine the desired damping ratio of the DC power oscillation mode, typically within the range of 0.3 to 0.7, to balance control responsiveness and system stability performance.
- Calculate the feasible range of control parameters based on Equations (28), (36), and (43), such that the resulting damping ratio of the DC power oscillation mode falls within the predefined range.
- Verify the calculated control parameters through time-domain simulations to ensure that the system response meets the expected performance criteria.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronyms | |
| AVR | Automatic Voltage Regulator |
| BTB | Back-to-Back |
| CSG | China Southern Power Gird |
| LFPO | Low-frequency power oscillation |
| MTDC | Multi-terminal High Voltage Direct Current |
| PCC | Point of Common Coupling |
| POD | Power Oscillation Damping |
| PSS | Power System Stabilizer |
| SCR | Short Circuit Ratio |
| SE, RE | Sending and Receiving Ends |
| SG | Synchronous generator |
| VSC-HVDC | Voltage Source Converter based High Voltage Direct Current |
| WF | Wind Farm |
| Variables | |
| Ci | Equivalent capacitance of the DC-link of the VSC |
| Pdi, Qdi | Active and reactive power output of the VSC |
| Pdcref, Qdcref | Active power reference value |
| Vdci, Idci | DC voltage and DC current |
| Vdcref | DC voltage reference value |
| Vci | AC voltage the point of common coupling |
| Iini | DC current inject into the DC-link |
| iabci | AC current output of the VSC |
| Kpdi + Kidi/s | Transfer function of the outer DC voltage or active power control loop of the VSC |
| Kpqi + Kiqi/s | Transfer function of the reactive power control loop of the VSC |
| Kpdc + Kidc/s | Transfer function of the co-frequency controller |
| Rdc | Equivalent resistance of the DC line |
| ωi | Angular frequency of Sending- or Receiving-end systems |
| Mi, Di | Equivalent inertia and damping coefficients of the synchronous area |
| s | Laplace operator |
| I | Identify matrix |
| Δ | Small increment in a variable |
| Subscript i | Sending-end or Receiving-end |
| Subscript 0 | Value of variables at steady state |
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LCC-HVDC links 1 and 2 | Rated DC power | 1000 MW | VSC-HVDC link 3 | Rated DC power | 1000 MW |
| Rated DC voltage | 500 kV | Rated DC voltage | ±360 kV | ||
| Rated DC current | 2.0 kA | Rated DC current | 1.389 kA | ||
| Rated transformer ratio | 525/135.2 kV | Rated transformer ratio | 525/375 kV | ||
| Transformer Capacity | 398.1 MVA | Transformer Capacity | 398.1 MVA | ||
| Equivalent transformer inductance | 0.14 p.u. | Equivalent transformer inductance | 0.14 p.u. | ||
| Smoothing reactor | 150 mH | Smoothing reactor | 20 mH | ||
| DC line equivalent resistance | 0.05 Ω | DC line equivalent resistance | 0.05 Ω | ||
| Equivalent Capacity of DC link | 5000 uF | ||||
| PI control parameters of the DC current controller (Kp, Ti) | (0.789, 0.05092) | PI control parameters of the DC voltage outer controller (Kp1, Ti1) | (12, 0.08) | ||
| PI control parameters of the DC voltage controller (Kp, Ti) | (0.667, 0.595) | PI control parameters of the active power outer controller | (0.25, 0.2) | ||
| Filter time constant of DC current | 0.025 s | PI control parameters of d-axis current loop control | (0.65, 0.01) | ||
| Filter time constant of DC voltage | 0.0325 s | PI control parameters of q-axis current loop control | (0.65, 0.01) |
| Steam governor GVO4 | Frequency deadband | ±0.03 Hz | Gate servo time constant | 0.1 s |
| Permanent droop | 0.05 p.u. | Maximum opening rate | 0.1 p.u./s | |
| Speed relay lad time constant | 0.25 s | Maximum closing rate | −0.1 p.u./s | |
| Steam turbine TUR1 | Lp turbine (K2, K4, K6, K8) | 0.0 p.u. | Steam chest time constant | 0.2 s |
| K1 | 0.3 p.u. | Reheater time constant | 6.0 s | |
| K3 | 0.4 p.u. | Reheater/Cross-over time constant | 0.4 s | |
| K5 | 0.3 p.u. | Cross-over time constant | 1.0 s | |
| Exciter DCA1 | Lead time constant | 0.0 s | Saturation at Efd1 | 0.15685 p.u. |
| Lag time constant | 0.0 s | Exciter voltage for SE1 | 3.10 p.u. | |
| Regulator gain | 20.0 p.u. | Saturation at Efd2 | 0.06637 p.u. | |
| Regulator time constant | 0.055 s | Exciter voltage for SE2 | 2.30 p.u. | |
| Exciter time constant | 0.3 s | Rate feedback gain | 0.125 p.u. | |
| Regular output limit | ±1.7 | Rate feedback time constant | 1.8 s | |
| PSS STAB1 | Transducer time constant | 0.0 s | 1st lead time constant | 0.0 s |
| PSS gain | 5.0 p.u. | 1st lad time constant | 6.0 s | |
| Washout time constant | 10.0 s | 2nd lead time constant | 0.08 s | |
| Filter constant A1 | 0.0 s | 2nd lad time constant | 0.01 s | |
| Filter constant A2 | 0.0 s | PSS output limit | ±0.1 p.u. | |
| co-frequency controller | Proportional Gain Kpdc | 100 p.u. | Power output limit | ±300 MW |
| Integral Gain Kidc | 350 s | Filter time constant | 0.09 s |
References
- Li, Y.; Tang, G.; An, T.; Pang, H.; Wang, P.; Yang, J.; Wu, Y.; He, Z. Power Compensation Control for Interconnection of Weak Power Systems by VSC-HVDC. IEEE Trans. Power Deliv. 2017, 32, 1964–1974. [Google Scholar]
- Zhou, B.; Rao, H.; Wu, W.; Wang, T.; Hong, C.; Huang, D.; Yao, W.; Su, X.; Mao, T. Principle and Application of Asynchronous Operation of China Southern Power Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1032–1040. [Google Scholar]
- de Haan, J.E.; Concha, C.E.; Gibescu, M.; van Putten, J.; Doorman, G.L.; Kling, W.L. Stabilising system frequency using HVDC between the Continental European, Nordic, and Great Britain systems. Sustain. Energy Grids Netw. 2016, 5, 125–134. [Google Scholar]
- Obradovic, D.; Dijokas, M.; Misyris, G.S.; Weckesser, T.; Van Cutsem, T. Frequency Dynamics of the Northern European AC/DC Power System: A Look-Ahead Study. IEEE Trans. Power Syst. 2022, 37, 4661–4672. [Google Scholar] [CrossRef]
- Rao, H.; Wu, W.; Mao, T.; Zhou, B.; Hong, C.; Liu, Y.; Wu, X. Frequency control at the power sending side for HVDC asynchronous interconnections between Yunnan power grid and the rest of CSG. CSEE J. Power Energy Syst. 2020, 7, 105–113. [Google Scholar]
- Yan, K.; Li, G.; Zhang, R.; Xu, Y.; Jiang, T.; Li, X. Frequency Control and Optimal Operation of Low-Inertia Power Systems with HVDC and Renewable Energy: A Review. IEEE Trans. Power Syst. 2024, 39, 4279–4295. [Google Scholar]
- Misyris, G.S.; Tosatto, A.; Chatzivasileiadis, S.; Weckesser, T. Zero-Inertia Offshore Grids: N-1 Security and Active Power Sharing. IEEE Trans. Power Syst. 2022, 37, 2052–2062. [Google Scholar]
- Shifa, F.A.; Moursi, M.S.E.; Khadkikar, V. Fuzzy-Adaptive Droop Gain Selection for Enhanced Frequency Support and DC Voltage Regulation in MTDC System. IEEE Trans. Power Syst. 2024, 40, 2310–2323. [Google Scholar]
- Zhu, J.; Shen, Z.; Yu, L.; Bu, S.; Li, X.; Chung, C.Y.; Booth, C.D.; Jia, H.; Wang, C. Bilateral Inertia and Damping Emulation Control Scheme of VSC-HVDC Transmission Systems for Asynchronous Grid Interconnections. IEEE Trans. Power Syst. 2023, 38, 4281–4292. [Google Scholar]
- Sun, K.; Li, K.J.; Pan, J.; Xiao, H.; Liu, Y. Frequency Response Reserves Sharing through VSC-HVDC for Interconnections. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Zhu, J.; Wang, X.; Zhao, J.; Yu, L.; Li, S.; Li, Y.; Guerrero, J.M.; Wang, C. Inertia Emulation and Fast Frequency-Droop Control Strategy of a Point-to-Point VSC-HVdc Transmission System for Asynchronous Grid Interconnection. IEEE Trans. Power Electron. 2022, 37, 6530–6543. [Google Scholar]
- Lee, D.; Jang, G. Sub-Synchronous Oscillation Constrained Communication-Free Grid Frequency Control of Offshore Wind Farm Linked HVDC System. IEEE Trans. Power Syst. 2024, 39, 4397–4408. [Google Scholar]
- Kabsha, M.M.; Rather, Z.H. A New Control Scheme for Fast Frequency Support from HVDC Connected Offshore Wind Farm in Low-Inertia System. IEEE Trans. Sustain. Energy. 2020, 11, 1829–1837. [Google Scholar] [CrossRef]
- Shadabi, H.; Kamwa, I. Dual Adaptive Nonlinear Droop Control of VSC-MTDC System for Improved Transient Stability and Provision of Primary Frequency Support. IEEE Access 2021, 9, 76806–76815. [Google Scholar]
- Wang, W.; Cao, Y.; Jiang, L.; Chen, C.; Li, Y.; Li, S.; Shi, X. A Perturbation Observer-Based Fast Frequency Support for Low-Inertia Power Grids Through VSC-HVDC Systems. IEEE Trans. Power Syst. 2024, 39, 2461–2474. [Google Scholar]
- Sun, K.; Xiao, H.; Liu, S.; Liu, Y. Machine learning-based fast frequency response control for a VSC-HVDC system. CSEE J. Power Energy Syst. 2020, 7, 688–697. [Google Scholar]
- Pan, R.; Yang, Y.; Yang, J.; Liu, D. Enhanced grid forming control for MMC-HVDC with DC power and voltage regulation. Electr. Power Syst. Res. 2024, 229, 110166. [Google Scholar]
- Lee, G.-S.; Kwon, D.-H.; Kim, Y.-K.; Moon, S.-I. A New Communication-Free Grid Frequency and AC Voltage Control of Hybrid LCC-VSC-HVDC Systems for Offshore Wind Farm Integration. IEEE Trans. Power Syst. 2023, 38, 1309–1321. [Google Scholar]
- Shao, B.; Zhao, S.; Gao, B.; Yang, Y.; Blaabjerg, F. Adequacy of the Single-Generator Equivalent Model for Stability Analysis in Wind Farms with VSC-HVDC Systems. IEEE Trans. Energy Convers. 2021, 36, 907–918. [Google Scholar]
- Harnefors, L.; Johansson, N.; Zhang, L. Impact on Interarea Modes of Fast HVDC Primary Frequency Control. IEEE Trans. Power Syst. 2016, 32, 1350–1358. [Google Scholar]
- Li, Z.; Xue, Y.; Chen, M.; Swanson, A.; Yang, C.; Li, J. Analysis of the Impact of HVDC Frequency Control Parameters on HVDC Power Oscillation and Interarea Oscillation. In Proceedings of the 2024 International Conference on HVDC (HVDC), Urumqi, China, 8–9 August 2024. [Google Scholar]
- Harnefors, L.; Johansson, N.; Zhang, L.; Berggren, B. Interarea Oscillation Damping Using Active-Power Modulation of Multiterminal HVDC Transmissions. IEEE Trans. Power Syst. 2014, 29, 2529–2538. [Google Scholar] [CrossRef]
- Renedo, J.; Garcia-Cerrada, A.; Rouco, L.; Sigrist, L. Coordinated Design of Supplementary Controllers in VSC-HVDC Multi-Terminal Systems to Damp Electromechanical Oscillations. IEEE Trans. Power Syst. 2021, 36, 712–721. [Google Scholar]
- Zhang, Z.; Zhao, X. Coordinated Power Oscillation Damping from a VSC-HVDC Grid Integrated with Offshore Wind Farms: Using Capacitors Energy. IEEE Trans. Sustain. Energy 2023, 14, 751–762. [Google Scholar]
- Pipelzadeh, Y.; Chaudhuri, N.R.; Chaudhuri, B.; Green, T.C. Coordinated Control of Offshore Wind Farm and Onshore HVDC Converter for Effective Power Oscillation Damping. IEEE Trans. Power Syst. 2017, 32, 1860–1872. [Google Scholar] [CrossRef]
- Guo, C.; Xu, L.; Yang, S.; Jiang, W. A Supplementary Damping Control for MMC-HVDC System to Mitigate the Low-Frequency Oscillation Under Low Inertia Condition. IEEE Trans. Power Deliv. 2023, 38, 287–298. [Google Scholar]
- Fu, Q.; Du, W.; Wang, H.; Ma, X.; Xiao, X. DC Voltage Oscillation Stability Analysis of DC-Voltage-Droop-Controlled Multiterminal DC Distribution System Using Reduced-Order Modal Calculation. IEEE Trans. Smart Grid 2022, 13, 4327–4339. [Google Scholar]
- Sajadi, A.; Kenyon, R.W.; Hodge, B.-M. Synchronization in electric power networks with inherent heterogeneity up to 100% inverter-based renewable generation. Nat. Commun. 2022, 13, 2490. [Google Scholar] [CrossRef]
- Fu, Q.; Du, W.; Wang, H.; Ren, B.; Xiao, X. Small-Signal Stability Analysis of a VSC-MTDC System for Investigating DC Voltage Oscillation. IEEE Trans. Power Syst. 2021, 36, 5081–5091. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Zhou, C.; Chen, Y.; Guo, Y.; Fan, Z.; Li, Z. Investigation of Frequency Response Sharing-Induced Power Oscillations in VSC-HVDC Systems for Asynchronous Interconnection. Energies 2025, 18, 2928. https://doi.org/10.3390/en18112928
Wang K, Zhou C, Chen Y, Guo Y, Fan Z, Li Z. Investigation of Frequency Response Sharing-Induced Power Oscillations in VSC-HVDC Systems for Asynchronous Interconnection. Energies. 2025; 18(11):2928. https://doi.org/10.3390/en18112928
Chicago/Turabian StyleWang, Ke, Chunguang Zhou, Yiping Chen, Yan Guo, Zhantao Fan, and Zhixuan Li. 2025. "Investigation of Frequency Response Sharing-Induced Power Oscillations in VSC-HVDC Systems for Asynchronous Interconnection" Energies 18, no. 11: 2928. https://doi.org/10.3390/en18112928
APA StyleWang, K., Zhou, C., Chen, Y., Guo, Y., Fan, Z., & Li, Z. (2025). Investigation of Frequency Response Sharing-Induced Power Oscillations in VSC-HVDC Systems for Asynchronous Interconnection. Energies, 18(11), 2928. https://doi.org/10.3390/en18112928