
Transmitting Double-D Coil to Wirelessly Recharge the Battery of a Drone with a Receiving Coil Integrated in the Landing Gear

 , , ,
, , , 
Abstract
1. Introduction
2. MCR-WPT Circuit Model and Performances
3. WPT System Design
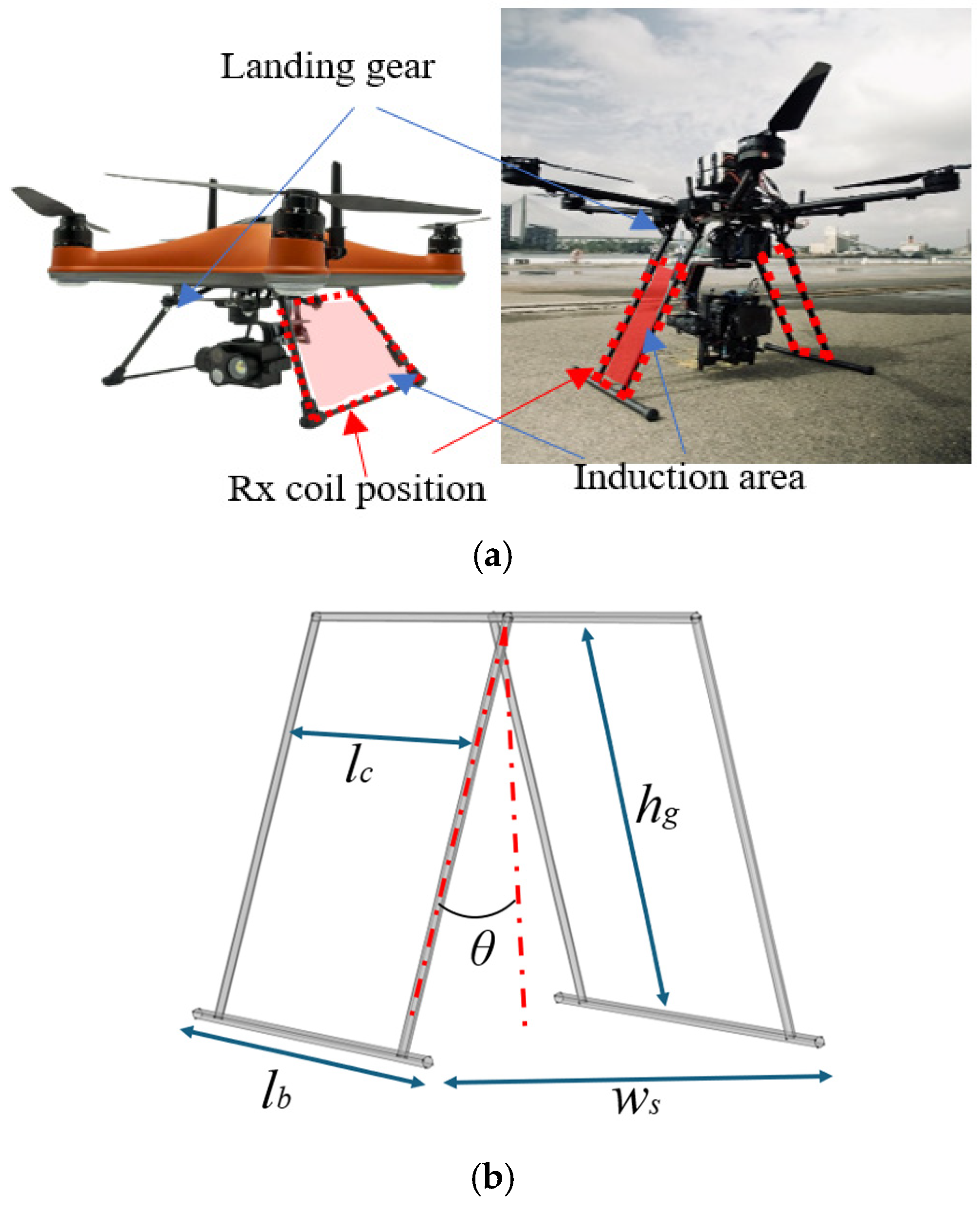
3.1. WPT Receiving Coil Design
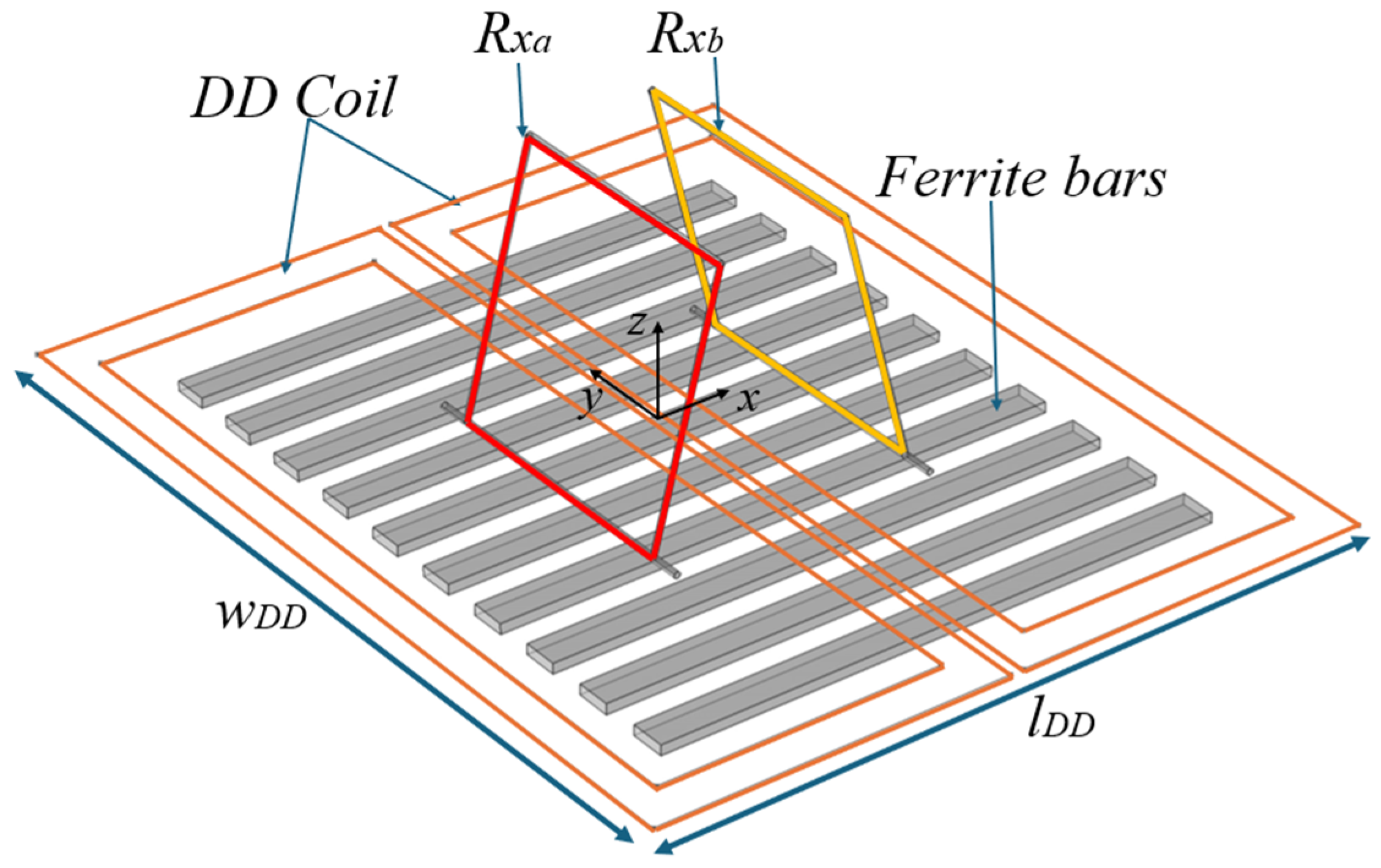
3.2. WPT Transmitting Coil Design
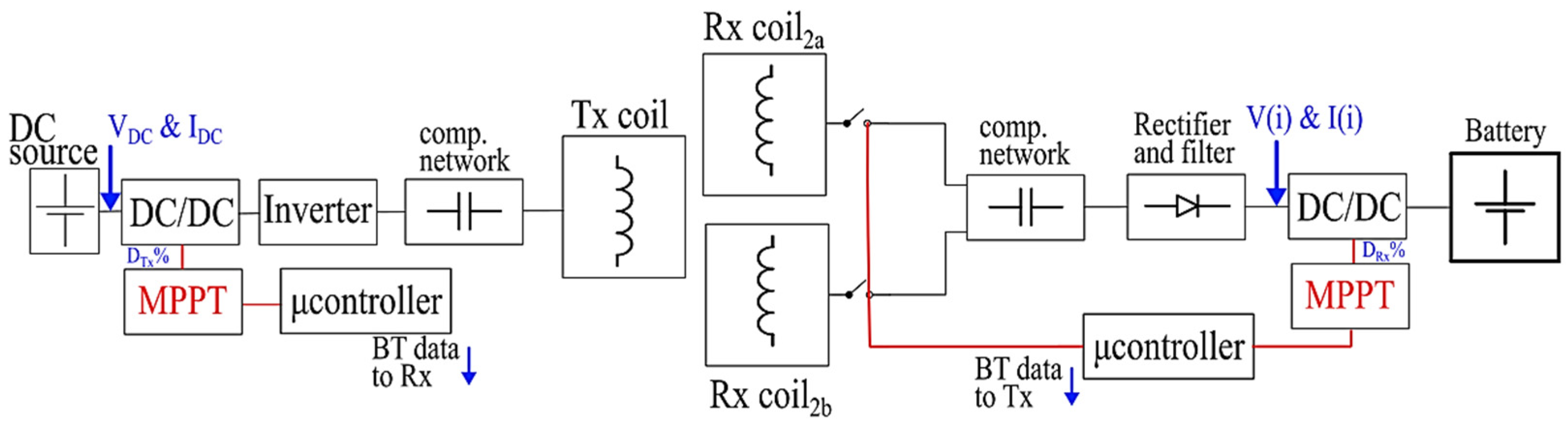
4. Electronic Design and Control System
4.1. Receiving Side Converter and Logic Control
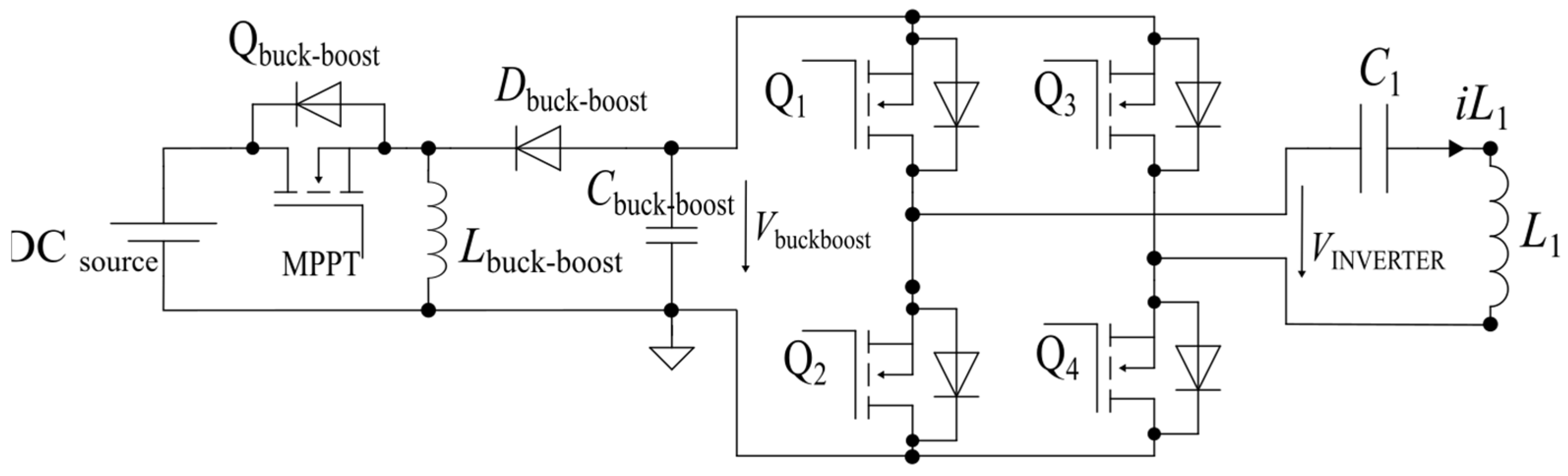
4.2. Transmitting Side Converter and Logic Control
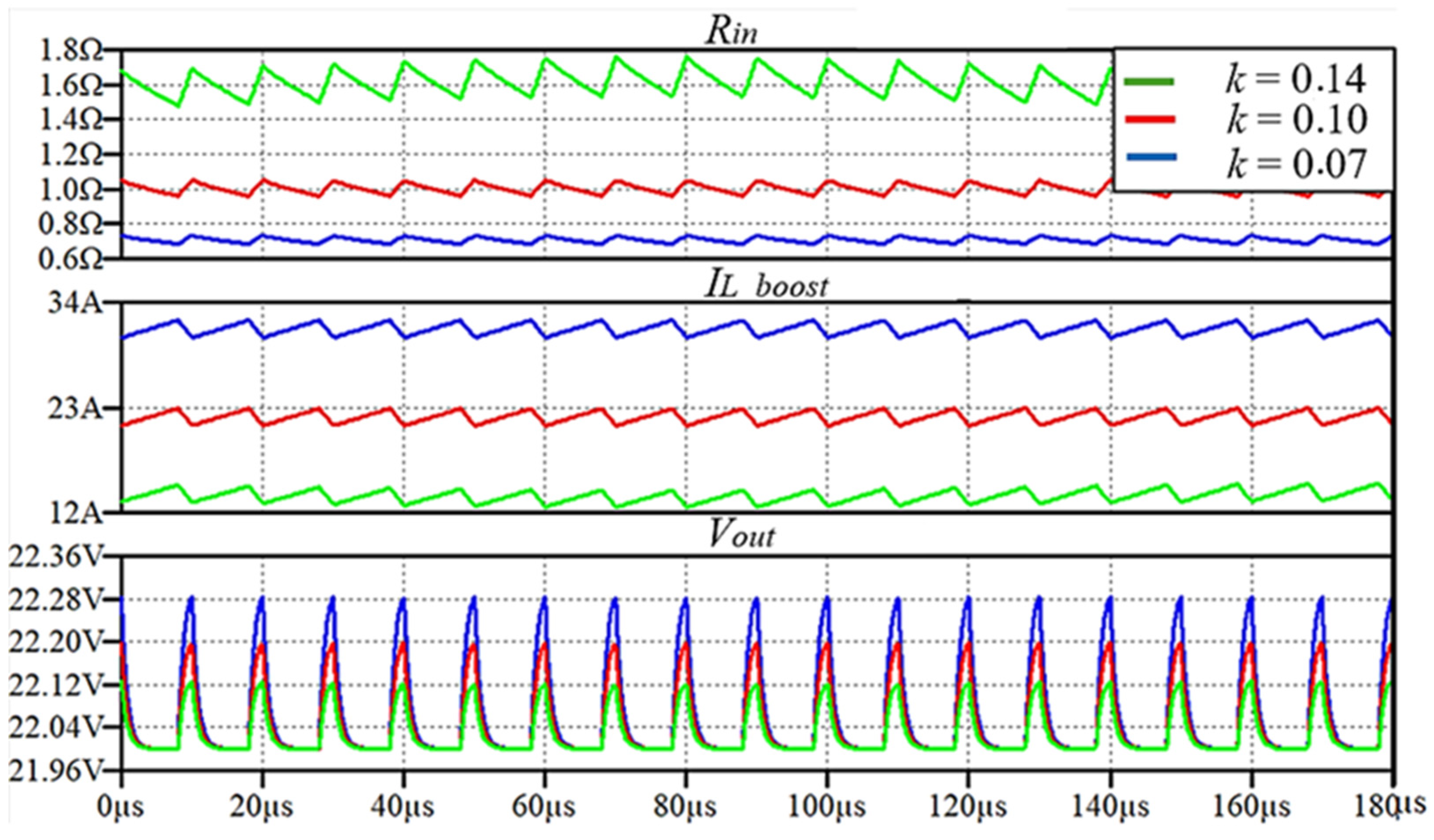
5. Numerical Simulation and Experimental Measurements Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Misalignment | Measurements | |||||
|---|---|---|---|---|---|---|
| x (cm) | y (cm) | L1 (µH) | L2a (µH) | L2b (µH) | ka | kb |
| −10 | 0 | 209 | 1.09 | 1.07 | 0.158 | 0.045 |
| 0 | 0 | 0.129 | 0.137 | |||
| 25 | 0 | 0.064 | 0.061 | |||
| −10 | 20 | 0.113 | 0.017 | |||
| 10 | 20 | 0.038 | 0.062 | |||
| 20 | 20 | 0.054 | 0.006 | |||
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sujit, P.B.; Ghose, D. Search using multiple UAVS with flight time constraints. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 491–509. [Google Scholar] [CrossRef]
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active Power Management System for an Unmanned Aerial Vehicle Powered by Solar Cells, a Fuel Cell, and Batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177. [Google Scholar] [CrossRef]
- De Silva, S.C.; Phlernjai, M.; Rianmora, S.; Ratsamee, P. Inverted docking station: A conceptual design for a battery-swapping platform for quadrotor UAVs. Drones 2022, 6, 56. [Google Scholar] [CrossRef]
- Swieringa, K.A.; Hanson, C.B.; Richardson, J.R.; White, J.D.; Hasan, Z.; Qian, E.; Girard, A. Autonomous battery swapping system for small-scale helicopters. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3335–3340. [Google Scholar]
- Mostafa, T.M.; Muharam, A.; Hattori, R. Wireless battery charging system for drones via capacitive power transfer. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Chongqing, China, 20–22 May 2017; pp. 1–6. [Google Scholar]
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A review on UAV wireless charging: Fundamentals, applications, charging techniques and standards. IEEE Access 2021, 9, 69235–69266. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless power transfer technology applied to an autonomous electric UAV with a small secondary coil. Energies 2018, 11, 352. [Google Scholar] [CrossRef]
- Song, C.; Kim, H.; Kim, Y.; Kim, D.; Jeong, S.; Cho, Y.; Lee, S.; Ahn, S.; Kim, J. EMI reduction methods in wireless power transfer system for drone electrical charger using tightly coupled three-phase resonant magnetic field. IEEE Trans. Ind. Electron. 2018, 65, 6839–6849. [Google Scholar] [CrossRef]
- Junaid, A.B.; Lee, Y.; Kim, Y. Design and implementation of autonomous wireless charging station for rotary-wing UAVs. Aerosp. Sci. Technol. 2016, 54, 253–266. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. High efficiency and lightweight wireless charging system for drone batteries. In Proceedings of the 2017 AEIT International Annual Conference (AEIT), Cagliari, Italy, 20–22 September 2017; pp. 1–4. [Google Scholar]
- Hong, S.; Jeong, S.; Lee, S.; Sim, B.; Kim, H.; Kim, J. A Dual Resonance Near Field Communication Coil for EMF Reduction in Near Field Communication and Wireless Power Transfer Dual Coil System. In Proceedings of the 2019 IEEE International Symposium on Electromagnetic Compatibility, Signal & Power Integrity (EMC+SIPI), New Orleans, LA, USA, 22–26 July 2019; pp. 644–647. [Google Scholar] [CrossRef]
- Pahlavan, S.; Shooshtari, M.; Ashtiani, S.J. Star-Shaped Coils in the Transmitter Array for Receiver Rotation Tolerance in Free-Moving Wireless Power Transfer Applications. Energies 2022, 15, 8643. [Google Scholar] [CrossRef]
- Kim, J.-D.; Sun, C.; Suh, I.-S. A proposal on wireless power transfer for medical implantable applications based on reviews. In Proceedings of the 2014 IEEE Wireless Power Transfer Conference, Jeju, Republic of Korea, 8 May 2014; pp. 166–169. [Google Scholar] [CrossRef]
- Shinohara, N. Power without wires. IEEE Microw. Mag. 2011, 11, 64–73. [Google Scholar] [CrossRef]
- Covic, G.A.; Boys, J.T. Inductive power transfer. Proc. IEEE 2013, 101, 1276–1289. [Google Scholar] [CrossRef]
- Campi, T.; Dionisi, F.; Cruciani, S.; De Santis, V.; Feliziani, M.; Maradei, F. Magnetic field levels in drones equipped with Wireless Power Transfer technology. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; pp. 544–547. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Innovative design of drone landing gear used as a receiving coil in wireless charging application. Energies 2019, 12, 3483. [Google Scholar] [CrossRef]
- Ji, L.; Zhang, C.; Ge, F.; Qian, B.; Sun, H. A Parameter Design Method for a Wireless Power Transmission System with a Uniform Magnetic Field. Energies 2022, 15, 8829. [Google Scholar] [CrossRef]
- Prosen, N.; Truntič, M.; Domajnko, J. Control of an Inductive Power Transfer System Using a Double Coil Structure. Electronics 2022, 11, 2148. [Google Scholar] [CrossRef]
- Domajnko, J.; Prosen, N. A Control of a z-Axis Rotation-Tolerant Wireless Power TransferSystem Using a Double DD Coil. Electronics 2023, 12, 606. [Google Scholar] [CrossRef]
- Aubakirov, R.R. Comparison of the Geometry of the Optimized Coil Pair of Wireless Power Transmission Systems with SS and SP Compensation. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), Moscow, Russia, 26–29 January 2021. [Google Scholar] [CrossRef]
- Obayashi, T.S.S. UAV/Drone Fast Wireless Charging FRP Frustum Port for 85-kHz 50-V 10-A Inductive Power Transfer. In Proceedings of the 2020 IEEE Wireless Power Transfer Conference (WPTC), Seoul, Republic of Korea, 15–19 November 2020. [Google Scholar]
- Um, I.; Park, S.; Kim, H.T.; Kim, H. Configuring RTK-GPS architecture for system redundancy in multi-drone operations. IEEE Access 2020, 8, 76228–76242. [Google Scholar] [CrossRef]
- Su, M.; Zhao, Z.; Zhu, Q.; Dan, H. A converter based on energy injection control for AC-AC, AC-DC, DC-DC, DC-AC conversion. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May 2018–2 June 2018; pp. 1394–1398. [Google Scholar] [CrossRef]
- de Alencar, V.T.; Andersen, R.L. A High-Gain Non-Isolated Boost-SEPIC DC-DC Converter. In Proceedings of the 2024 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Mangalore, India, 18–21 December 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New Sensorless Hybrid MPPT Algorithm Based on Fractional Short-Circuit Current Measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar] [CrossRef]
- Katche, M.L.; Makokha, A.B.; Zachary, S.O.; Adaramola, M.S. A Comprehensive Review of Maximum Power Point Tracking (MPPT) Techniques Used in Solar PV Systems. Energies 2023, 16, 2206. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, X.; Gao, Z.; Bai, T. Summary of the novel MPPT (maximum power point tracking) algorithm based on few intelligent algorithms specialized on tracking the GMPP (global maximum power point) for photovoltaic systems under partially shaded conditions. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 311–315. [Google Scholar] [CrossRef]
- Niu, S.; Zhao, Q.; Niu, S.; Jian, L. A Comprehensive Investigation of Thermal Risks in Wireless EV Chargers Considering Spatial Misalignment from a Dynamic Perspective. IEEE J. Emerg. Sel. Top. Ind. Electron. 2024, 5, 1560–1571. [Google Scholar] [CrossRef]






| Misalignment | Activated Coil | Efficiency | |
|---|---|---|---|
| x (cm) | y (cm) | Rx Coil a or b | % |
| 0 | 0 | b | 94.5 |
| 25 | 0 | a | 86.7 |
| −10 | 20 | a | 90.08 |
| 10 | 20 | b | 86.4 |
| 20 | 20 | a | 84.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boumerdassi, W.; Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Transmitting Double-D Coil to Wirelessly Recharge the Battery of a Drone with a Receiving Coil Integrated in the Landing Gear. Energies 2025, 18, 2587. https://doi.org/10.3390/en18102587
Boumerdassi W, Campi T, Cruciani S, Maradei F, Feliziani M. Transmitting Double-D Coil to Wirelessly Recharge the Battery of a Drone with a Receiving Coil Integrated in the Landing Gear. Energies. 2025; 18(10):2587. https://doi.org/10.3390/en18102587
Chicago/Turabian StyleBoumerdassi, Wassim, Tommaso Campi, Silvano Cruciani, Francesca Maradei, and Mauro Feliziani. 2025. "Transmitting Double-D Coil to Wirelessly Recharge the Battery of a Drone with a Receiving Coil Integrated in the Landing Gear" Energies 18, no. 10: 2587. https://doi.org/10.3390/en18102587
APA StyleBoumerdassi, W., Campi, T., Cruciani, S., Maradei, F., & Feliziani, M. (2025). Transmitting Double-D Coil to Wirelessly Recharge the Battery of a Drone with a Receiving Coil Integrated in the Landing Gear. Energies, 18(10), 2587. https://doi.org/10.3390/en18102587