

Enhanced Fault Localization for Active Distribution Networks via Robust Three-Phase State Estimation

Abstract
1. Introduction
1.1. Literature Review
1.2. Research Gaps and Contributions
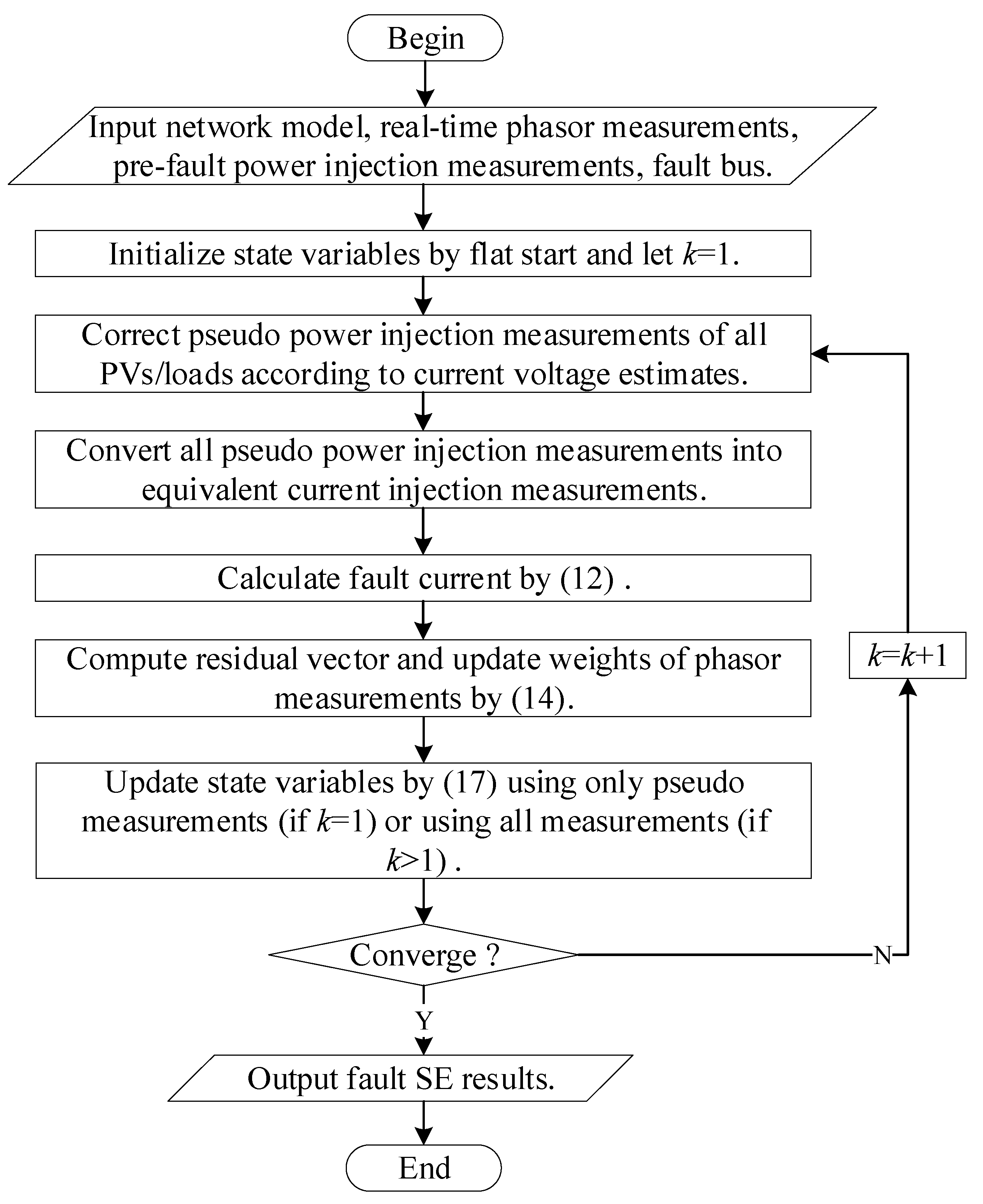
- A measurement transformation-based SE model is built for fault conditions, leveraging real-time voltage phasor measurements combined with pseudo-measurements derived from pre-fault SE results. To address photovoltaic (PV) power output distortions caused by fault-induced voltage sags, the method incorporates dynamic correction of PV pseudo power injection measurements through successive SE iterations, utilizing voltage magnitude estimates during each iteration.
- A robust fault SE model is built using the quadratic-constant (QC)-based generalized maximum likelihood estimation. The model is solved using the iteratively reweighted least squares (IRLS) algorithm with adaptive measurement weighting. Given the inherently low measurement redundancy in distribution networks, residual contamination is prevented by deferring phasor measurement weight adjustments until post-initial iterations.
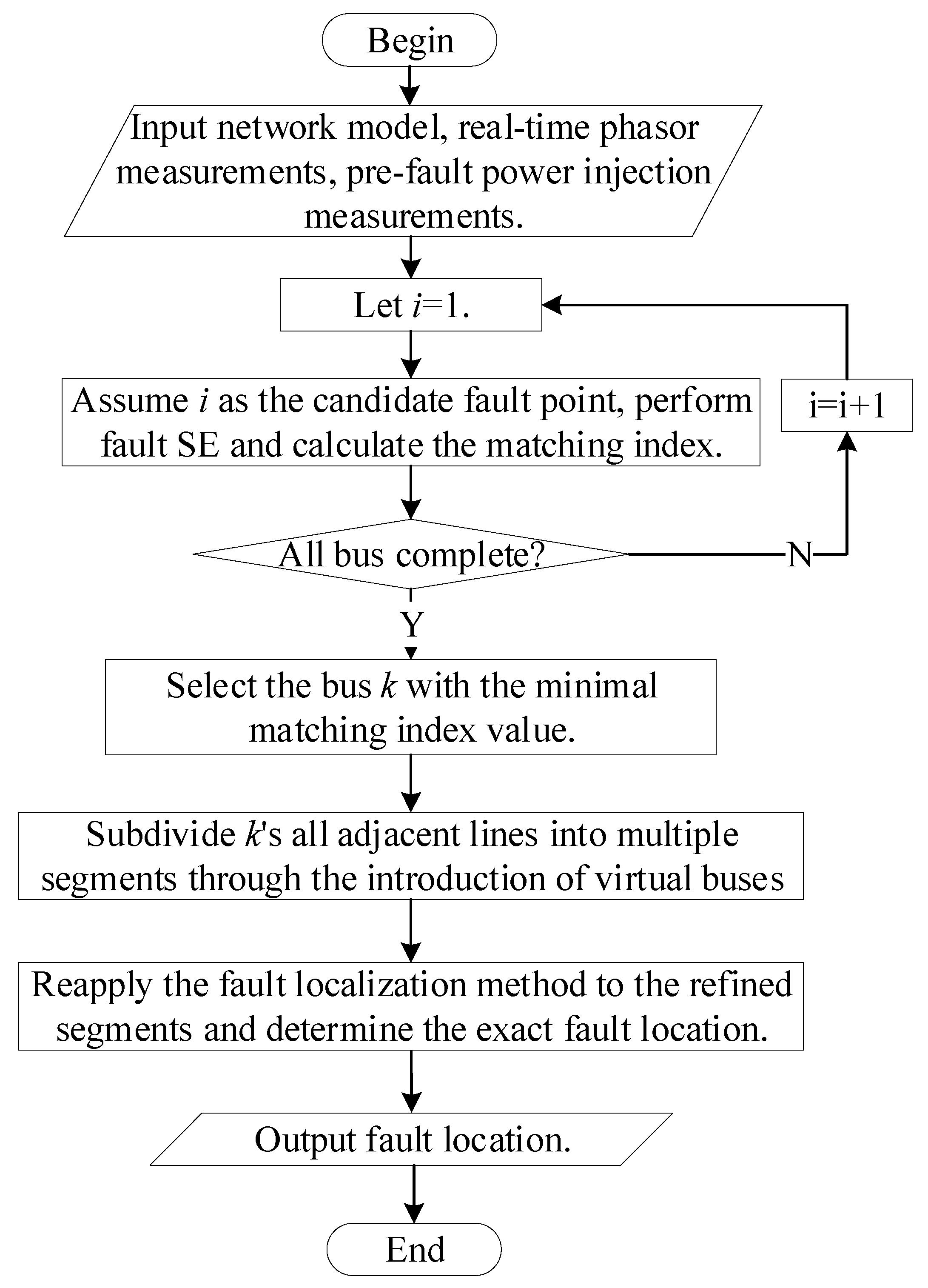
- A fault SE matching-based fault localization algorithm is proposed through systematic traversal of candidate buses, where each candidate is evaluated by performing fault SE with injected calculated fault current into this candidate bus during each iteration. The matching index is designed to account for the weight disparity of different types of measurements and measurement placement for fault localization.
2. Fault SE for Three-Phase Distribution Networks
2.1. Three-Phase SE Based on Measurement Transformation
- (1)
- Pseudo power injection measurements at all non-slack buses: These measurements can be obtained from pre-fault SE results. Due to the nonlinear coupling between power measurements and voltages, needs to be updated at each iteration, resulting in a huge computational burden. To mitigate this, the power measurements are transformed into equivalent complex current measurements in each iteration, enabling the Jacobian matrix to remain constant throughout the iteration:
- (2)
- Real-time complex voltage measurements at all μPMU buses: These measurements can be directly used in the SE calculation. The effects of harmonics and transient components are not considered due to two factors. First, following a network fault, the fundamental frequency components of voltage and current typically stabilize within a few cycles. Although transient disturbances such as high-frequency oscillations and decaying DC components emerge initially, their energy diminishes exponentially due to the impedance of the fault path and the inherent damping of the system. Consequently, before protective devices operate to clear the fault (typically within 4–5 cycles), the fundamental frequency components dominate the electrical quantities and sufficiently characterize fault location information. Second, μPMUs equipped with full-cycle Fourier transform algorithms and adaptive filtering techniques can extract fundamental frequency component magnitudes, phases, and frequencies in real-time during transient fault conditions, while effectively suppressing residual transient/harmonic interference.
2.2. Three-Phase Fault SE
2.2.1. Correction of Pseudo-PV Power Injection Measurements Under Fault Conditions
2.2.2. Correction of Pseudo-Load Power Measurements Under Fault Conditions
2.2.3. Fault Current Compensation During Ground Fault Conditions
3. Robust Three-Phase Fault SE-Based Fault Localization
3.1. Robust Three-Phase Fault SE
- Efficiency: Under the assumed measurement model, the estimation should be optimal or nearly optimal.
- Stability: When there is a slight deviation between the actual measurement model and the assumed model, the estimation should be minimally affected.
- Breakdown resistance: When there is a significant deviation between the actual measurement model and the assumed model, the estimation should not suffer from catastrophic failure.
3.2. Robust SE-Based Fault Node Localization
- (1)
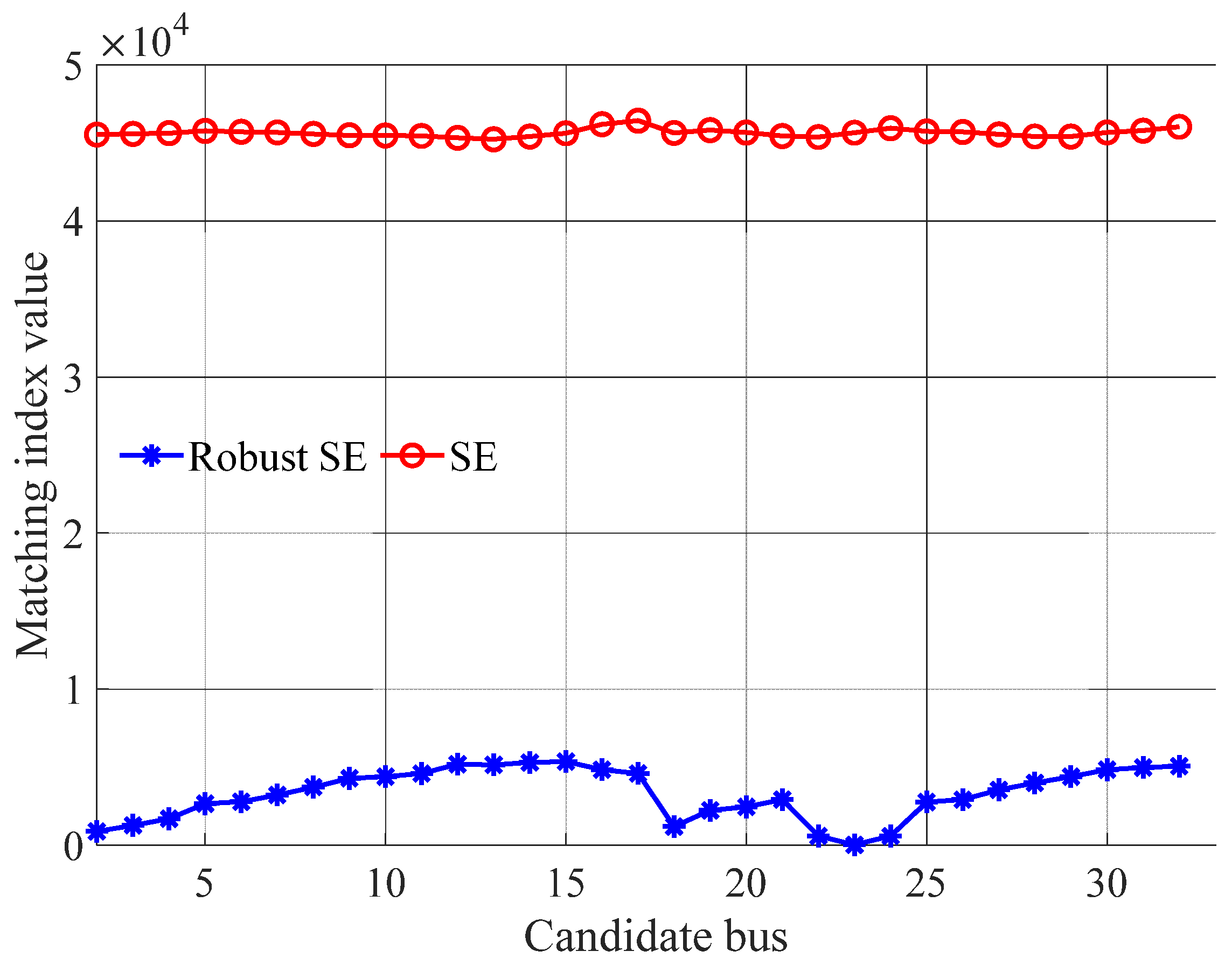
- The first term is the L2 norm of the measurement residual vector, excluding phasor measurements with zero weighting factors. Since the weights of phasor measurements and pseudo-measurements differ significantly, the initial weight matrix W is not considered to prevent a situation where the large disparity in weights causes one type of measurement residuals dominate the matching index, thereby masking the characteristics of the other type of measurement residuals.
- (2)
- The second term is the L1 norm of the residual vector of voltage magnitude measurements specifically at remote-end buses of distribution laterals. These voltage magnitude measurements come from low-cost smart meters and do not participate in SE as the nonlinear relation with state variables make the Jacobian matrix no longer constant. However, if μPMUs are configured at these buses, the phasor measurements they provide can be incorporated into the SE, and the second term can be dropped to simplify the formulation.
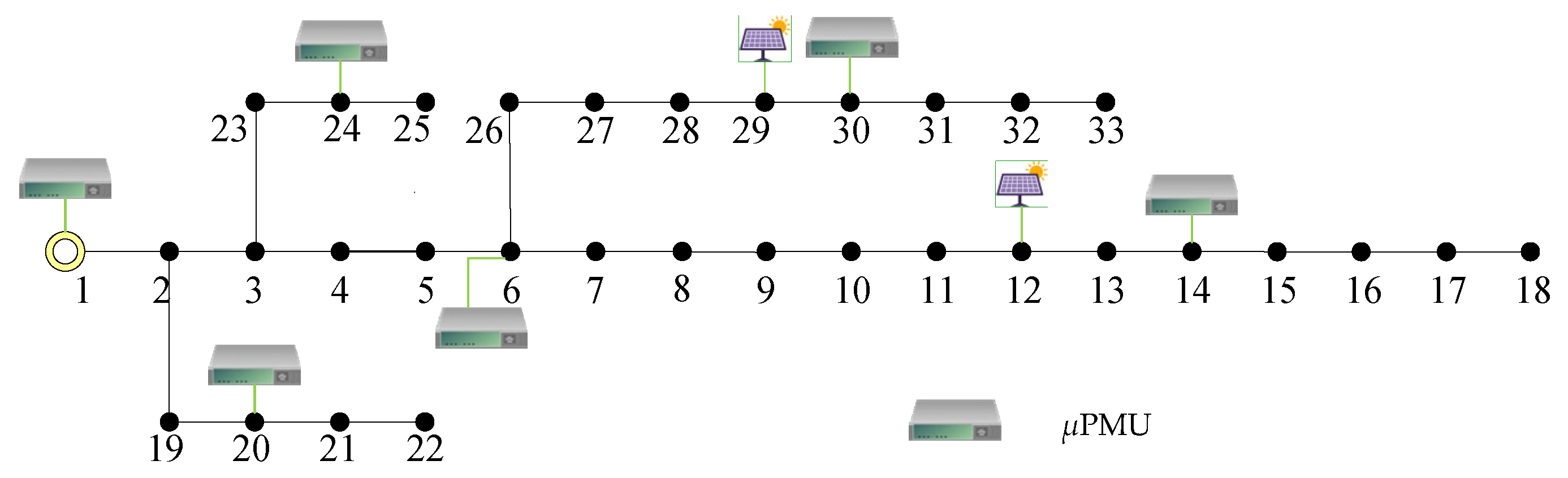
3.3. Measurement Configuration
- If the assumed tentative bus is also at the downstream of bus i, then the compensated fault current always flows through the path from the root bus to bus i. It is easy for the SE algorithm to make the estimated voltage magnitude of bus i close to the measured value, regardless of which downstream bus is assumed. Therefore, it is impossible to distinguish which downstream bus is a terminal bus of the true faulted line.
- If the assumed tentative bus is at the upstream of bus i, then the compensated fault current only flows through a part of the path from the root bus to bus i. The estimated voltage value of bus i tends to be greater than the measured value. Being unable to minimize the overall objective function value, the SE algorithm will try to increase the pseudo-measurements’ residuals to reduce the voltage magnitude measurement’s residual. In other words, the high pseudo measurement residuals are the cost that must to be paid for accurately fitting of the voltage magnitude measurement. The further away the assumed tentative bus is from the fault point, the larger the cost (the first term in (18)) that needs to be paid. In this case, it is possible to distinguish which upstream bus is a terminal bus of the true faulted line.
4. Simulation Results
4.1. Typical Scenario Testing
4.2. Comprehensive Multi-Scenario Testing
4.3. Comparative Tests Between Robust SE-Based and AI-Based Fault Localization Methods
5. Conclusions
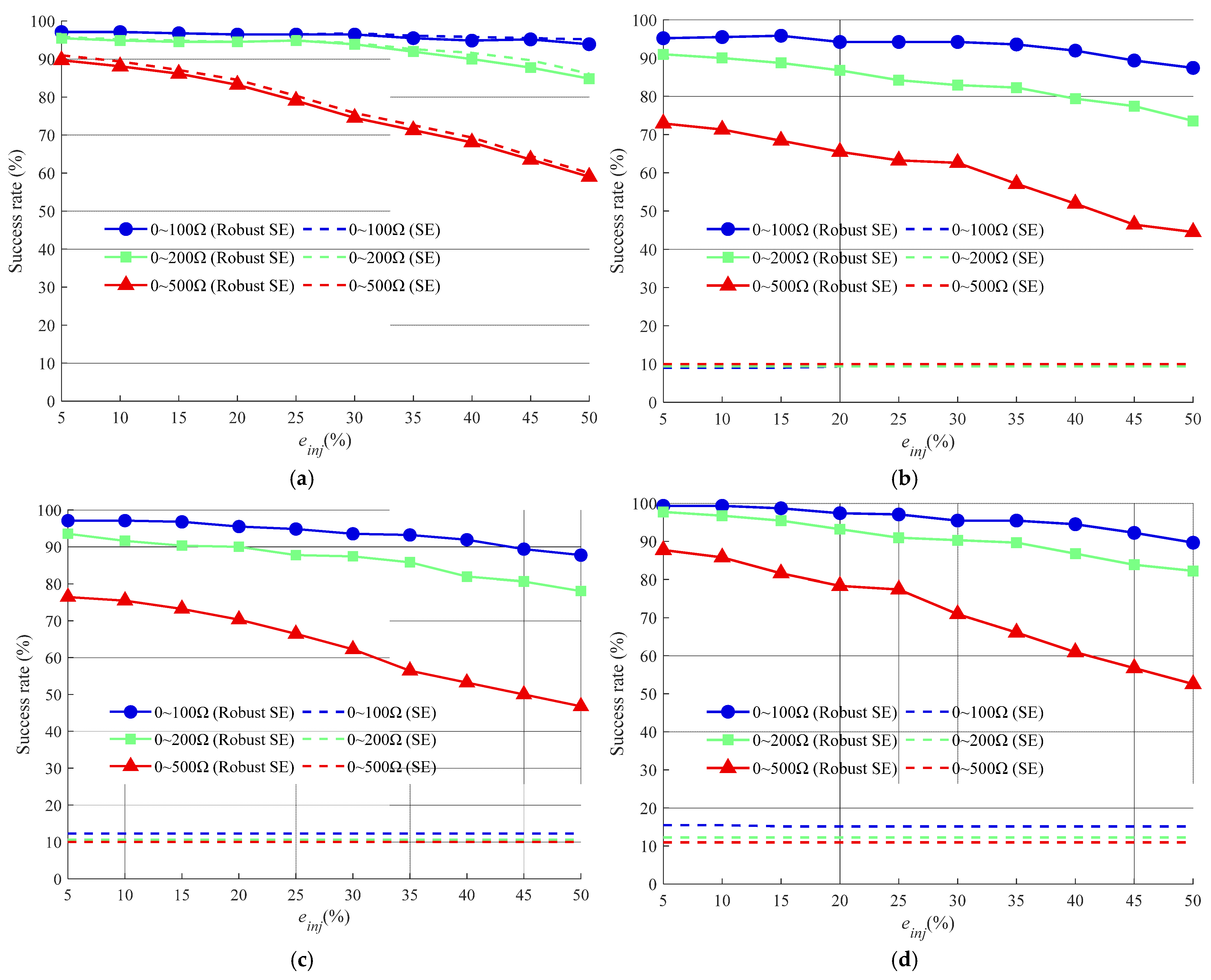
- Under ideal measurement conditions without incorrect data, the robust SE-based method demonstrates similar performance to the conventional SE-based method. Consequently, the proposed approach can be integrated into various existing SE-based fault localization methods to enhance their robustness against incorrect data.
- The robust SE-based method maintains high effectiveness even under severe data corruption, while the conventional SE-based localization fails completely. Specifically, it achieves a 90% success rate despite simultaneous challenges, including 20% relative errors in pseudo-power injection measurements, high-resistance faults (up to 200 Ω), and the contamination of 20% erroneous voltage measurements.
- The method demonstrates stable performance under measurement value deterioration. Specifically, it shows only a 5% success rate reduction when erroneous measurements degrade from 0.8 to 0.4. This controlled accuracy attenuation persists even under high fault-resistance conditions (200 Ω), validating its resilience to uncalibrated measurement distortions while maintaining fault signature detectability.
- The proposed robust SE-based fault localization method demonstrates a superior incorrect data rejection capability compared to GNN-based approaches. Furthermore, it eliminates the need for extensive fault sample training, exhibiting stronger adaptability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abdalla, O.H.; Mostafa, A. Optimal number and locations of smart RMUs for self-healing distribution networks. Int. Trans. Electr. Energy Syst. 2022, 2022, 4819129. [Google Scholar] [CrossRef]
- Mirshekali, H.; Dashti, R.; Keshavarz, A.; Torabi, A.J.; Shaker, H.R. A novel fault location methodology for smart distribution networks. IEEE Trans. Smart Grid 2021, 12, 1277–1288. [Google Scholar] [CrossRef]
- Tashakkori, A.; Wolfs, P.J.; Islam, S.; Abu-Siada, A. Fault location on radial distribution networks via distributed synchronized traveling wave detectors. IEEE Trans. Power Deliv. 2020, 35, 1553–1562. [Google Scholar] [CrossRef]
- Chen, B.C.; Yu, N.; Chen, B.; Tian, C.H.; Chen, Y.J.; Chen, G.R. Fault location for underground cables in ungrounded MV distribution networks based on ZSC signal injection. IEEE Trans. Power Deliv. 2021, 36, 2965–2977. [Google Scholar] [CrossRef]
- Stipetic, N.; Filipovic-Grcic, B.; Ziger, I. LF signal injection for earth-fault localization in unearthed distribution network. Electr. Power Syst. Res. 2023, 220, 109249. [Google Scholar] [CrossRef]
- Yang, M.; Liu, Y.; Guo, L.; Wang, Z.; Zhu, J.; Zhang, Y.; Cheng, B.; Wang, C. Hierarchical distributed chance-constrained voltage control for HV and MV DNs based on nonlinearity-adaptive data-driven method. IEEE Trans. Power Syst. 2025, 40, 806–819. [Google Scholar] [CrossRef]
- Ge, L.; Liu, H.; Yan, J.; Sun, B.; Li, Y.; Hou, L. A novel distributed PV data virtual collection with continuous-binary denoising auto-encoders. IEEE Trans. Smart Grid 2024, 15, 1152–1164. [Google Scholar] [CrossRef]
- Li, W.T.; Deka, D.; Chertkov, M.; Wang, M. Real-Time faulted line localization and PMU placement in power systems through convolutional neural networks. IEEE Trans. Power Syst. 2019, 34, 4640–4651. [Google Scholar] [CrossRef]
- Guo, M.F.; Yang, N.C.; Chen, W.F. Deep-learning-based fault classification using Hilbert-Huang transform and convolutional neural network in power distribution systems. IEEE Sens. J. 2019, 19, 6905–6913. [Google Scholar] [CrossRef]
- Rizeakos, V.; Bachoumis, A.; Andriopoulos, N.; Birbas, M.; Birbas, A. Deep learning-based application for fault location identification and type classification in active distribution. Appl. Energy 2023, 338, 120932. [Google Scholar] [CrossRef]
- Mirshekali, H.; Keshavarz, A.; Dashti, R.; Hafezi, S.; Shaker, H.R. Deep learning-based fault location framework in power distribution grids employing convolutional neural network based on capsule network. Electr. Power Syst. Res. 2023, 223, 109529. [Google Scholar] [CrossRef]
- Jamei, M.; Ramakrishna, R.; Tesfay, T.; Gentz, R.; Roberts, C.; Scaglione, A.; Peisert, S. Phasor measurement units optimal placement and performance limits for fault localization. IEEE J. Sel. Areas Commun. 2020, 38, 180–192. [Google Scholar] [CrossRef]
- Al-Hinai, A.; Karami-Horestani, A.; Alhelou, H.H. A multi-objective optimal PMU placement considering fault-location topological observability of lengthy lines: A case study in OMAN grid. Energy Rep. 2023, 9, 1113–1123. [Google Scholar] [CrossRef]
- Sheta, A.N.; Abdulsalam, G.M.; Eladl, A.A. Online tracking of fault location in distribution systems based on PMUs data and iterative support detection. Int. J. Electr. Power Energy Syst. 2021, 128, 106793. [Google Scholar] [CrossRef]
- Pignati, M.; Zanni, L.; Romano, P.; Cherkaoui, R.; Paolone, M. Fault detection and faulted line identification in active distribution networks using synchrophasors-based real-time state estimation. IEEE Trans. Power Deliv. 2017, 32, 381–392. [Google Scholar] [CrossRef]
- Gholami, M.; Abbaspour, A.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M.; Lehtonen, M. Detecting the location of short-circuit faults in active distribution network using PMU-based state estimation. IEEE Trans. Smart Grid 2020, 11, 1396–1406. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.H.; Khodayar, M.E. Graph-based faulted line identification using micro-PMU data in distribution systems. IEEE Trans. Smart Grid 2020, 11, 3982–3992. [Google Scholar] [CrossRef]
- Pegoraro, P.A.; Sitzia, C.; Solinas, A.V.; Sulis, S.; Carta, D.; Benigni, A. Compensation of systematic errors for improved PMU-based fault detection and location in three-phase distribution grids. IEEE Trans. Instrum. Meas. 2024, 73, 9003712. [Google Scholar] [CrossRef]
- Abur, A.; Exposito, A.G. Power System State Estimation: Theory and Implementation; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Su, S.; Liang, D.; Zeng, L.; Wang, X. Robust state estimation of integrated electricity gas systems based on constrained iteratively reweighted least squares. In Proceedings of the 2023 International Conference on Power System Technology (PowerCon), Jinan, China, 21–22 September 2023; pp. 1–6. [Google Scholar]
- Dugan, R.C.; McDermott, T.E. IEEE In An open source platform for collaborating on smart grid research. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Different Fault Resistance Levels | ||
|---|---|---|---|
| 0~100 Ω | 0~200 Ω | 0~500 Ω | |
| SE | 14.4% | 12.5% | 11.7% |
| Robust SE | 95.5% | 87.6% | 75.3% |
| GNN | 67.1% | 56.9% | 42.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, G.; Liang, D.; Zhao, Y.; Wang, X. Enhanced Fault Localization for Active Distribution Networks via Robust Three-Phase State Estimation. Energies 2025, 18, 2551. https://doi.org/10.3390/en18102551
He G, Liang D, Zhao Y, Wang X. Enhanced Fault Localization for Active Distribution Networks via Robust Three-Phase State Estimation. Energies. 2025; 18(10):2551. https://doi.org/10.3390/en18102551
Chicago/Turabian StyleHe, Guorun, Dong Liang, Yuezi Zhao, and Xiaoxue Wang. 2025. "Enhanced Fault Localization for Active Distribution Networks via Robust Three-Phase State Estimation" Energies 18, no. 10: 2551. https://doi.org/10.3390/en18102551
APA StyleHe, G., Liang, D., Zhao, Y., & Wang, X. (2025). Enhanced Fault Localization for Active Distribution Networks via Robust Three-Phase State Estimation. Energies, 18(10), 2551. https://doi.org/10.3390/en18102551