
Leveraging Harris Hawks Optimization for Enhanced Multi-Objective Optimal Power Flow in Complex Power Systems


Abstract
:1. Introduction
1.1. Background and Impetus for the Study
1.2. Related Works and Limitations
1.3. Research Gaps and Proposed Contributions
- Use of HHO to MaO-OPF: This is the first known case where HHO is used to address the multiobjective characteristics of power flow optimization problems.
- Adaptive Constraint-Handling Mechanisms: A unified penalty-repair function method guarantees feasibility even in the case of tight operating constraints.
- Dynamic Exploration-Exploitation Balance: The algorithm also uses Hawk’s hunting strategies which are effective in modifying the search behavior of the algorithm to avoid stagnation and improve solution quality.
- Efficient Pareto-Optimal Solution Generation: The use of the new method improves convergence and diversity metrics much more than state of art algorithms such as NSGA-III and MOEA/D-DRA—by making parameter-free optimization and historical data the primary approach.
1.4. Integration of HHO with OPF Problem
- Dynamic Exploration-Exploitation Balance: HHO incorporates automatic features that make it effective in evading local minima which is a challenge in OPF containing conflicting objectives.
- Constraint-Handling Capability: This enables the algorithm to combine penalty and recovery approaches to adhere to tight operating limits in a power system.
- Computational Efficiency: HHO features superior convergence rate than regular met heuristics hence being suitable for real time dealings in power systems.
- Pareto-Optimal Solutions: HHO employs adaptive pounced strategies along with a saturate babbling population which ensures that a great number of sparsely populated Pareto optimal solutions are created which are important for multi-objective OPF problems.
1.5. Paper Organization
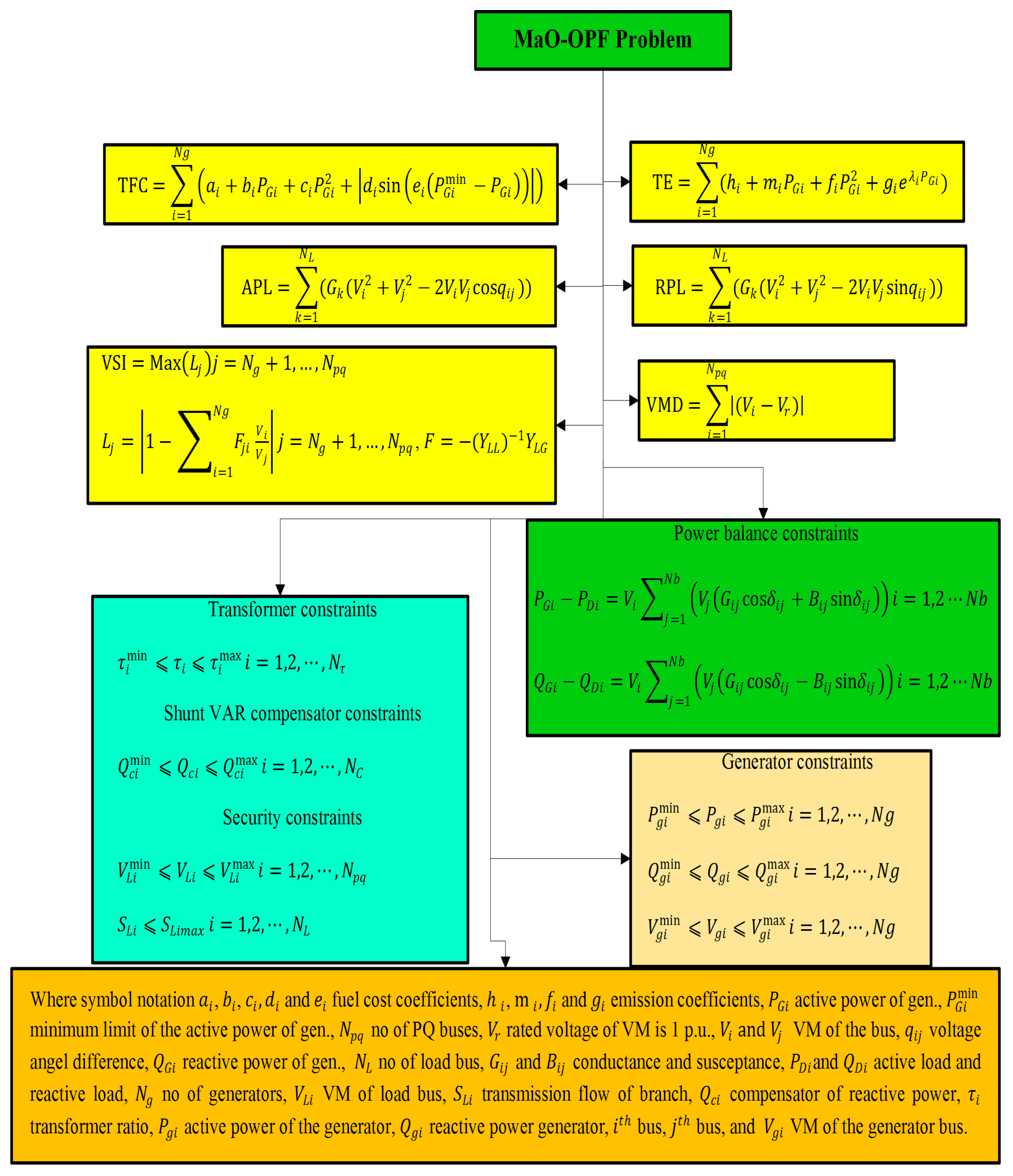
2. Multi-Objective Optimal Power Flow (MaO-OPF) Problem Formulation
2.1. Problem Overview
2.2. Objectives
- Minimization of Fuel Cost (TFC):
- 2.
- Minimization of Emission (TE):
- 3.
- Minimization of Active Power Loss (APL):
- 4.
- Minimization of Reactive Power Loss (RPL):
- 5.
- Minimization of Voltage Magnitude Deviation (VMD):
- 6.
- Maximization of Voltage Stability Index (VSI): A stability index, such as the Line Stability Index (L-index), can be used for VSI as described in relation (7):
2.3. Constraints
- Equality Constraints:
- ○
- Power Balance Equations:
- 2.
- Inequality Constraints:
- ○
- Generator Constraints:
- ○
- Voltage Constraints:
- ○
- Transformer Tap Settings and Shunt Capacitors: Defined to maintain voltage stability and to minimize losses.
2.4. Key Variables and Parameters
3. Harris Hawks Optimization Algorithm for MaO-OPF
3.1. Overview of Harris Hawks Optimization (HHO)
3.1.1. History
3.1.2. Exploration Phase
3.1.3. Transition from Exploration to Exploitation
3.1.4. Exploitation Phase
- a.
- Hard Besiege
- b.
- Soft Besiege with a series of fast dives
- c.
- Hard Besieges with a series of fast dives
3.1.5. Pseudo Code of HHO
| Algorithm 1: Harris Hawks Optimization (HHO) |
| Inputs: Population size (N), Maximum iterations (T) Outputs: Optimal solution (Rabbit location) and its fitness 1. Initialize the population (positions of N hawks randomly). 2. Calculate the fitness of each hawk. 3. Set the best hawk position as the Rabbit location (Xrabbit). 4. For t = 1 to T (iteration loop): a. Update the escape energy (E) of the rabbit: E = 2 × (1 − t/T) b. For each hawk in the population: i. Calculate random parameters (r, J) for decision-making. ii. Update the hawk’s position: - If |E| ≥ 1 (Exploration Phase): Update position using exploration equations. - Else (Exploitation Phase): If r ≥ 0.5 and |E| ≥ 0.5: Perform Soft Siege (Equation (16)). Else if r ≥ 0.5 and |E| < 0.5: Perform Hard Siege (Equation (18)). Else if r < 0.5 and |E| ≥ 0.5: Perform Soft Siege with Rapid Dives (Equation (22)). Else: Perform Hard Siege with Rapid Dives (Equation (23)). c. Evaluate the fitness of the updated positions. d. Update the Rabbit location if a better solution is found. 5. Output the Rabbit location and its fitness as the optimal solution. |
3.2. Adaptation of HHO for MaO-OPF Problem
- Step 1: Initialize Population and Algorithm Parameters
- Step 2: Evaluate Objective Functions (e.g., TFC, VSI)
- Step 3: Check and Apply Constraints (Penalty Mechanisms)
- Step 4: Transition Between Exploration and Exploitation Phases
- Step 5: Update Hawk Positions (Adaptive Pouncing)
- Step 6: Evaluate Fitness and Generate Pareto Front
- Step 7: Terminate Upon Convergence Criteria
3.2.1. Protocol for Multi-Objective Optimal Power Flow Problem Solution
3.2.2. Hybrid Constraints Handling Mechanism
3.2.3. Fuzzy Decision Based Best Compromise Solution
3.2.4. Mechanisms to Mitigate Local Optima in MaOHHO
- Dynamic Energy Adaptation: Such an adaptive escape energy mechanism th evades the pet’s energy and dynamically adjusts the behavior of the search in the balance between exploration and exploitation (15). This guarantees that there is a balance in intensifying the search around promising regions and exploring new areas.
- Levy Flight Strategy: The strategy tries to mimic natural feeding habits and encompasses thelevy flights mechanism which enables the agents some degree of arbitrary large jumps into the search space during exploitation and thereby reducing risks of early settling.
- Soft and Hard Siege Strategies: These strategies switch between the normal and reverse ones which benefits from adaptive parameters for optimization of the searching process.
- Adaptive Parameter-Tuning: Self dependence by means of self-dependent measures enhancing population diversity during exploration phases for example the escape probability and its intensity are incorporated.
- Constraint Handling via Penalty Functions: This is a combined constraining approach where the infeasible solutions are punished which aids the search of viable areas in the region of solution space. These improvements guarantee the fact that diversity preservation, convergence and cessation of the MaOHHO algorithm do not conflict with the global optimization.
4. Empirical Study and Evaluation of HHO on the IEEE 30-Bus System
- Start: Initialize Parameters
- ○
- Define the population size, maximum iterations, convergence threshold, and all essential parameters for the HHO algorithm.
- Generate Initial Population
- ○
- Generate initial hawk positions randomly within the feasible solution space, ensuring compliance with system constraints.
- Evaluate Objectives and Constraints
- ○
- Calculate the values for each objective function, including Total Fuel Cost, Emissions, Active and Reactive Power Loss, Voltage Deviation, and Voltage Stability.
- ○
- Verify compliance with check constraints.
- Update Hawk Positions (Encircling Prey)
- ○
- Modify the positions of the hawks in accordance with the optimal solution (prey) identified up to this point, adjusting the exploration and exploitation phases as required.
- Adaptive Pouncing Phase
- ○
- Implement a pounce strategy to advance hawks toward optimal solutions, taking into account adaptive mechanisms relative to the distance from prey.
- Escape Mechanism (Switch Strategies)
- ○
- Implement a probability-driven mechanism for alternating between exploration and exploitation to circumvent local optima and preserve solution diversity.
- Evaluate New Solutions and Constraints
- ○
- Evaluate new roles by re-evaluating goals and confirming compliance with constraints.
- Convergence Check
- ○
- If the specified convergence criteria are satisfied (such as maximum iterations or error tolerance), proceed to the termination phase; if not, revert to Step 4.
- End: Output Optimal Solutions
- ○
- Present the Pareto-optimal solutions, illustrating the trade-offs among all objectives.
4.1. Algorithm Parameters and Evaluation Metrics
- Generational Distance (GD): This metric quantifies the average distance between the obtained solutions and the actual Pareto front and thus describes the degree of convergence.
- Spread (SP): This metric measures the relative coverage of the Pareto front and the degree of concentration on selected parts which can be described as the degree of dispersion.
- Hypervolume (HV): This indicates the volume of the objective space which is covered by all of the solution and indicates the extent of ratio of focus to and concentration of diversity.
- Inter-generational Distance (IGD)—This parameter measures how well each set obtained in subsequent generations represents true Pareto front, and thus serves as a global measure of convergence and spread.
- DTLZ Benchmarks: Metrics such as Generational Distance, Measuring, Normalizing and Neutralizing Metric (ND) of Solutions, And Mean of Getters search space (GHI) inter and intra population distance employed. These, amongst others, are the measures commonly used in the evaluation of multi-objective optimization algorithms in most cases with respect to their levels of solution convergence, solution diversity, and the distribution of the Pareto front. DTLZ benchmarks are to facilitate general evaluation of the strength of the algorithm.
- MaO-OPF Problem: For the MaO-OPF problem, six objectives were considered; Total Fuel Cost, extreme inflation, savings all in multi banner capitalization and diversity and should able to predict the partial funds value, Total Emissions where the advancement in generation should reflect on the emissions side too. These objectives are an accurate reflection of the day-to-day concerns of the electric power systems, hence, promoting real life applications. These metrics are significant in evaluating the system performance under competing objectives and system flow balance.
4.2. Results Obtained for DTLZ Test Suite
4.2.1. Algorithmic Complexity
4.2.2. Specific Analysis of Power System Objectives
- Total Fuel Cost (TFC): It is evident from Table 7 that there will be considerable fuel savings with the MaOHHO Algorithm relative to NSGA-III and MOEA/D-DRA. This savings owes to the noticed adaptive pouncing mechanism which considering that cost minimization was paramount does effectively combine with other objectives as well.
- Total Emissions (TE): With emission minimization as a fitness directional for the algorithm, the objectives of emissions consistently meet the requirements even with consideration of cost structure. The points indicates to the Pareto edge of the irrigation systems in Figure 6.
- Voltage Stability Index (VSI): The maOHHO algorithm’s ability to reduce Larsen’s VSI paving the way for the enhancement of voltage stability consider its Levy flight which reasonably increases the chances of avoiding local minima.
- Voltage Magnitude Deviation (VMD): This method homogenizes power across the grid by allowing the algorithms to minimize control variable changes for voltage deviations as in Figure 7.
- Active and Reactive Power Losses: From Table 7, the procedures/solutions offered by MaOHHO are successful in minimizing power losses through generation outputs and compensating reactive power losses.
4.3. MaO-OPF Problem on IEEE-30 Bus System
- As the results for the DTLZ benchmark problems are retained for comparability, the outcomes of the Expected Financial Impact of Racism framework implementation are included under Table 10: Results for the DTLZ benchmark problems.
- This encompasses the specific results to the MaO-OPF problem for the Table 11: Results for the MaOPF problem and its scope.
4.4. Additional Benchmarking
4.5. Influence of Test System Characteristics on HHO Performance
- Network Topology: The interconnection of buses of the IEEE 30-bus system goes up to medium levels and this dual factor simplifies the dual approach of HHO exploring and exploiting the underlying algorithm’s possibilities. The existence and interconnection of buses with varying degrees of power flows affects the dynamism of the algorithm.
- Constraints: There are operative limits on the generators and transformers and the voltage levels also act as quite severe limitations. The HHO comes with self integrated adaptive constraint handling where constraints are observed without creating negative effects on the optimization performance.
- Objective Formulations: The six conflicting objectives e g fuel cost, emissions, voltage stability are objectives that bring out tensions into optimization and therefore need to be balanced in some manner. However, the dynamic strategies that contemplate at the same time dual efforts of exploring new avenues and farming existing avenues inherent to HHO contributes positively to efficient logger head balancing among the competing objectives.
5. Conclusions and Future Work
- Scalability to Larger Networks: Future research could explore the scalability of HHO for larger and more complex systems, such as the IEEE 118-bus or 300-bus networks.
- Real-time Implementation: Adjusting HHO’s parameters for real-time applications could enhance its utility in dynamic systems that receive varying inputs from renewable sources.
- Integration with Other Heuristics: Combining HHO with additional algorithms like Genetic Algorithms or Particle Swarm Optimization may improve convergence speed and solution quality, leading to hybrid models that leverage multiple techniques.
- Further Validation on Diverse Objectives: Testing HHO against a broader range of objectives, such as system resilience and renewable energy integration, would enhance its applicability to future energy systems.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koukaras, P.; Afentoulis, K.D.; Gkaidatzis, P.A.; Mystakidis, A.; Ioannidis, D.; Vagropoulos, S.I.; Tjortjis, C. Integrating Blockchain in Smart Grids for Enhanced Demand Response: Challenges, Strategies, and Future Directions. Energies 2024, 17, 1007. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Shadoul, M.; Yousef, H.; Al-Abri, R.; Sultan, H.M. Multi-agent based optimal sizing of hybrid renewable energy systems and their significance in sustainable energy development. Energy Rep. 2024, 12, 4830–4853. [Google Scholar] [CrossRef]
- Nick, M.; Cherkaoui, R.; Paolone, M. Optimal Planning of Distributed Energy Storage Systems in Active Distribution Networks Embedding Grid Reconfiguration. IEEE Trans. Power Syst. 2017, 33, 1577–1590. [Google Scholar] [CrossRef]
- Naderi, E.; Narimani, H.; Pourakbari-Kasmaei, M.; Cerna, F.V.; Marzband, M.; Lehtonen, M. State-of-the-Art of Optimal Active and Reactive Power Flow: A Comprehensive Review from Various Standpoints. Processes 2021, 9, 1319. [Google Scholar] [CrossRef]
- Fioretto, F.; Mak, T.W.K.; Van Hentenryck, P. Predicting AC Optimal Power Flows: Combining Deep Learning and Lagrangian Dual Methods. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 630–637. [Google Scholar] [CrossRef]
- Astashev, V.K.; Babitsky, V.I.; Kolovsky, M.Z.; Nielsen, S.R.K. Dynamics and Control of Machines. J. Vib. Acoust. 2004, 126, 317. [Google Scholar] [CrossRef]
- Betts, J.; Kolmanovsky, I. Practical Methods for Optimal Control using Nonlinear Programming. Appl. Mech. Rev. 2002, 55, B68. [Google Scholar] [CrossRef]
- Alizadeh, F. Interior Point Methods in Semidefinite Programming with Applications to Combinatorial Optimization. SIAM J. Optim. 1995, 5, 13–51. [Google Scholar] [CrossRef]
- Perera, A.T.D.; Kamalaruban, P. Applications of reinforcement learning in energy systems. Renew. Sustain. Energy Rev. 2020, 137, 110618. [Google Scholar] [CrossRef]
- Farh, H.M.H.; Al-Shamma’a, A.A.; Alaql, F.; Omotoso, H.O.; Alfraidi, W.; Mohamed, M.A. Optimization and uncertainty analysis of hybrid energy systems using Monte Carlo simulation integrated with genetic algorithm. Comput. Electr. Eng. 2024, 120, 109833. [Google Scholar] [CrossRef]
- Maier, H.R.; Kapelan, Z.; Kasprzyk, J.; Kollat, J.; Matott, L.S.; Cunha, M.C.; Dandy, G.C.; Gibbs, M.S.; Keedwell, E.; Marchi, A.; et al. Evolutionary algorithms and other metaheuristics in water resources: Current status, research challenges and future directions. Environ. Model. Softw. 2014, 62, 271–299. [Google Scholar] [CrossRef]
- Mavi, R.K.; Shekarabi, S.A.H.; Mavi, N.K.; Arisian, S.; Moghdani, R. Multi-objective optimisation of sustainable closed-loop supply chain networks in the tire industry. Eng. Appl. Artif. Intell. 2023, 126, 107116. [Google Scholar] [CrossRef]
- Pham, V.H.S.; Dang, N.T.N. Portia spider algorithm: An evolutionary computation approach for engineering application. Artif. Intell. Rev. 2024, 57, 24. [Google Scholar] [CrossRef]
- Shaikh, M.S.; Raj, S.; Abdul Latif, S.; Mbasso, W.F.; Kamel, S. Optimizing transmission line parameter estimation with hybrid evolutionary techniques. IET Gener. Transm. Distrib. 2024, 18, 1795–1814. [Google Scholar] [CrossRef]
- Almalaq, A.; Guesmi, T.; Albadran, S. A Hybrid Chaotic-Based Multiobjective Differential Evolution Technique for Economic Emission Dispatch Problem. Energies 2023, 16, 4554. [Google Scholar] [CrossRef]
- Mohseni, S.; Brent, A.C.; Burmester, D.; Browne, W.N. Lévy-flight moth-flame optimisation algorithm-based micro-grid equipment sizing: An integrated investment and operational planning approach. Energy AI 2021, 3, 100047. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, X.; Li, P. MOEA/D with many-stage dynamical resource allocation strategy for solution of many-objective OPF problems. Int. J. Electr. Power Energy Syst. 2020, 120, 106050. [Google Scholar] [CrossRef]
- Yi, J.-H.; Deb, S.; Dong, J.; Alavi, A.H.; Wang, G.-G. An improved NSGA-III algorithm with adaptive mutation operator for Big Data optimization problems. Future Gener. Comput. Syst. 2018, 88, 571–585. [Google Scholar] [CrossRef]
- Mashwani, W.K.; Salhi, A. A decomposition-based hybrid multiobjective evolutionary algorithm with dynamic resource allocation. Appl. Soft Comput. 2012, 12, 2765–2780. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching-Learning-Based Optimization: An optimization method for continuous non-linear large-scale problems. Inf. Sci. 2012, 183, 1–15. [Google Scholar] [CrossRef]
- Dhaubanjar, S.; Davidsen, C.; Bauer-Gottwein, P. Multi-Objective Optimization for Analysis of Changing Trade-Offs in the Nepalese W ater–Energy–Food Nexus with Hydropower Development. Water 2017, 9, 162. [Google Scholar] [CrossRef]
- Trivedi, I.N.; Jangir, P.; Parmar, S.A.; Jangir, N. Optimal power flow with voltage stability improvement and loss reduction in power systems using Moth-Flame Optimizer. Neural Comput. Appl. 2018, 30, 1889–1904. [Google Scholar] [CrossRef]
- Zhu, S.; Xu, L.; Goodman, E.D.; Lu, Z. A new many-objective evolutionary algorithm based on generalized Pareto dominance. IEEE Trans. Cybern. 2022, 52, 7776–7790. [Google Scholar] [CrossRef] [PubMed]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris Hawks Optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Huang, Y.; He, G.; Pu, Z.; Zhang, Y.; Luo, Q.; Ding, C. Multi-objective particle swarm optimization for optimal scheduling of household microgrids. Front. Energy Res. 2024, 11, 1354869. [Google Scholar] [CrossRef]
- Shaheen, A.M.; El-Sehiemy, R.A.; Alharthi, M.M.; Ghoneim, S.S.M.; Ginidi, A.R. Multi-objective jellyfish search optimizer for efficient power system operation based on multi-dimensional OPF framework. Energy 2021, 237, 121478. [Google Scholar] [CrossRef]
- Lefebvre, L.; Whittle, P.; Lascaris, E. Finkelstein, Feeding innovations and forebrain size in birds. Anim. Behav. 1997, 53, 549–560. [Google Scholar] [CrossRef]
- Sol, D.; Duncan, R.P.; Blackburn, T.M.; Cassey, P. Lefebvre, Big brains, enhanced cognition, and response of birds to novel environments. Proc. Natl. Acad. Sci. USA 2005, 102, 5460–5465. [Google Scholar] [CrossRef]
- Dubois, F.; Giraldeau, L.-A.; Hamilton, I.M.; Grant, J.W.; Lefebvre, L. Distraction sneakers decrease the expected level of aggression within groups: A game-theoretic model. Am. Nat. 2004, 164, E32–E45. [Google Scholar] [CrossRef]
- Lefebvre, L. Bird IQ Test Takes Flight. EurekAlert! 21 February 2005. Available online: https://www.eurekalert.org/news-releases/654380 (accessed on 18 December 2024).
- Humphries, N.E.; Queiroz, N.; Dyer, J.R.; Pade, N.G.; Musyl, M.K.; Schaefer, K.M.; Fuller, D.W.; Brunnschweiler, J.M.; Doyle, T.K.; Houghton, J.D.; et al. Environmental context explains l’evy and brownian movement patterns of marine predators. Nature 2010, 465, 1066–1069. [Google Scholar] [CrossRef]
- Zamani, H.; Nadimi-Shahraki, M.H.; Gandomi, A.H. Starling murmuration optimizer: A novel bio-inspired algorithm for global and engineering optimization. Comput. Methods Appl. Mech. Eng. 2022, 392, 114616. [Google Scholar] [CrossRef]
- Sims, D.W.; Southall, E.J.; Humphries, N.E.; Hays, G.C.; Bradshaw, C.J.A.; Pitchford, J.W.; James, A.; Ahmed, M.Z.; Brierley, A.S.; Hindell, M.A.; et al. Scaling laws of marine predator search behaviour. Nature 2008, 451, 1098–1102. [Google Scholar] [CrossRef] [PubMed]
- Viswanathan, G.M.; Afanasyev, V.; Buldyrev, S.; Murphy, E.; Prince, P.; Stanley, H.E. L’evy flight search patterns of wandering albatrosses. Nature 1996, 381, 413. [Google Scholar] [CrossRef]
- Reynolds, A.M.; Rhodes, C.J. The Lévy flight paradigm: Random search patterns and mechanisms. Ecology 2009, 90, 877–887. [Google Scholar] [CrossRef] [PubMed]
- Gautestad, A.O.; Mysterud, I. Complex animal distribution and abundance from memory-dependent kinetics. Ecol. Complex. 2006, 3, 44–55. [Google Scholar] [CrossRef]
- Shlesinger, M.F. Levy flights: Variations on a theme. Phys. D Nonlinear Phenom. 1989, 38, 304–309. [Google Scholar] [CrossRef]
- Viswanathan, G.; Afanasyev, V.; Buldyrev, S.V.; Havlin, S.; Da Luz, M.; Raposo, E.; Stanley, H.E. Lévy flights in random searches. Phys. A Stat. Mech. Its Appl. 2000, 282, 1–12. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Bristol, UK, 2010. [Google Scholar]
- PP, F.R.; Ismail, W.N.; Ali, M.a.S. A Metaheuristic Harris Hawks Optimization Algorithm for Weed Detection Using Drone Images. Appl. Sci. 2023, 13, 7083. [Google Scholar] [CrossRef]
- Pham, Q.-V.; Nguyen, D.C.; Mirjalili, S.; Hoang, D.T.; Nguyen, D.N.; Pathirana, P.N.; Hwang, W.-J. Swarm intelligence for next-generation networks: Recent advances and applications. J. Netw. Comput. Appl. 2021, 191, 103141. [Google Scholar] [CrossRef]
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB Platform for Evolutionary Multi-Objective Optimization [Educational Forum]. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H.; Chaib, A.E.; Abido, M.A.; El-Sehiemy, R.A. Optimal power flow using an Improved Colliding Bodies Optimization algorithm. Appl. Soft Comput. J. 2016, 42, 119–131. [Google Scholar] [CrossRef]
- Chaib, A.E.; Bouchekara, H.R.E.H.; Mehasni, R.; Abido, M.A. Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Int. J. Electr. Power Energy Syst. 2016, 81, 64–77. [Google Scholar] [CrossRef]
- Jangir, P.; Jangir, N. A new Non-Dominated Sorting Grey Wolf Optimizer (NS-GWO) algorithm: Development and application to solve engineering designs and economic constrained emission dispatch problem with integration of wind power. Eng. Appl. Artif. Intell. 2018, 72, 449–467. [Google Scholar] [CrossRef]
- Bhesdadiya, R.H.; Trivedi, I.N.; Jangir, P.; Jangir, N.; Kumar, A. An NSGA-III Algorithm for Solving Multi-Objective Economic/Environmental Dispatch Problem. Cogent Eng. 2016, 3, 1269383. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, S.; Tang, Q.; Zhou, Y.; Zeng, T. An improved NSGA-III integrating adaptive elimination strategy to solution of many-objective optimal power flow problems. Energy 2019, 172, 945–957. [Google Scholar] [CrossRef]
- Mirjalili, S.; Jangir, P.; Saremi, S. Multi-objective ant lion optimizer: A multi-objective optimization algorithm for solving engineering problems. Appl. Intell. 2017, 46, 79–95. [Google Scholar] [CrossRef]
- Mirjalili, S.; Jangir, P.; Mirjalili, S.Z.; Saremi, S.; Trivedi, I.N. Optimization of problems with multiple objectives using the multi-verse optimization algorithm. Knowl. Based Syst. 2017, 134, 50–71. [Google Scholar] [CrossRef]
- González-Álvarez, D.L.; Vega-Rodríguez, M.A.; Gómez-Pulido, J.A.; Sánchez-Pérez, J.M. Multiobjective teaching-learning-based optimization (MO-TLBO) for motif finding. In Proceedings of the 2012 IEEE 13th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 20–22 November 2012; pp. 141–146. [Google Scholar]
- Bader, J.; Zitzler, E. HypE: An algorithm for fast hypervolume-based many-objective optimization. Evol. Comput. 2011, 19, 45–76. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objective | Expression | Penalty Factor |
|---|---|---|
| Total Fuel Cost (TFC) | TFC = | 10 |
| Total Emission (TE) | 20 | |
| Voltage Stability Index (VSI) / Voltage Magnitude Deviation (VMD) | VMD = | 15 |
| Active Power Loss (APL) / Reactive Power Loss (RPL) | APL = RPL = | 12 |
| Symbol | Description | Units |
|---|---|---|
| Power generated by generator i | MW | |
| ai,bi,ci | Cost coefficients for generator i | Currency/MW, etc. |
| αi, βi, γi, δi, ζi, | Emission coefficients for generator i | - |
| Conductance between buses i and j | Siemens (S) | |
| Susceptance between buses i and j | Siemens (S) | |
| Voltage magnitude at bus i | p.u. | |
| Vref | Reference voltage magnitude | p.u. |
| θij | Phase angle difference between buses i and j | Radians |
| ΔVi | Voltage deviation at bus i | p.u. |
| Lij | Line stability index between buses i and j | - |
| E | Total system emissions | kg/h |
| C | Total system cost | Currency/h |
| Λ | Penalty factor for cost-related constraint violations | - |
| μ | Penalty factor for emission-related constraint violations | - |
| fobj | Objective function for optimization (fuel cost, emissions, etc.) | - |
| Pd,i | Active power demand at bus i | MW |
| Qd,i | Reactive power demand at bus i | MVAr |
| Pl | Total active power loss | MW |
| Ql | Total reactive power loss | MVAr |
| Qc | Reactive power supplied by shunt capacitor banks | MVAr |
| T | Transformer tap setting | p.u. |
| ϵ | Constraint violation threshold | - |
| Parameter | Value | Description |
|---|---|---|
| Population Size | 50 | Number of hawks in the search space |
| Max Iterations | 1000 | Maximum number of algorithm iterations |
| Escape Probability | 0.5 | Likelihood of hawks switching strategies |
| Convergence Rate | Adaptive | Adjusts based on distance to prey |
| Benchmark | Metrics Used | Objectives | Purpose |
|---|---|---|---|
| DTLZ Problems | GD, SP, HV, IGD | Varies across problems (e.g., 5, 7, 10 goals) | To evaluate algorithm robustness and versatility in generic optimization. |
| MaO-OPF Problem | GD, SP, HV, IGD (newly added) | TFC, TE, VSI, VMD, APL, RPL | To optimize power system operations with specific real-world objectives. |
| Problem | Objectives | MaOHHO (GD) | NSGA-III (GD) | MOEA/D-DRA (GD) | MaOHHO (SP) | NSGA-III (SP) | MOEA/D-DRA (SP) | MaOHHO (HV) | NSGA-III (HV) | MOEA/D-DRA (HV) |
|---|---|---|---|---|---|---|---|---|---|---|
| DTLZ1 | 5 | 0.142 (0.115) | 0.128 (0.032) | 0.132 (0.050) | 0.391 (0.318) | 0.343 (0.111) | 0.352 (0.120) | 0.951 (0.053) | 0.928 (0.048) | 0.935 (0.050) |
| 7 | 0.065 (0.013) | 0.072 (0.028) | 0.068 (0.025) | 0.243 (0.035) | 0.228 (0.045) | 0.239 (0.039) | 0.932 (0.045) | 0.918 (0.032) | 0.923 (0.041) | |
| 10 | 0.041 (0.014) | 0.045 (0.019) | 0.048 (0.021) | 0.221 (0.041) | 0.212 (0.038) | 0.216 (0.036) | 0.920 (0.032) | 0.905 (0.035) | 0.910 (0.034) | |
| DTLZ2 | 5 | 0.052 (0.021) | 0.053 (0.017) | 0.056 (0.019) | 0.391 (0.120) | 0.375 (0.102) | 0.382 (0.115) | 0.960 (0.037) | 0.951 (0.040) | 0.957 (0.039) |
| 7 | 0.073 (0.022) | 0.076 (0.018) | 0.070 (0.023) | 0.362 (0.101) | 0.348 (0.104) | 0.356 (0.112) | 0.948 (0.041) | 0.936 (0.038) | 0.943 (0.036) | |
| 10 | 0.068 (0.020) | 0.072 (0.019) | 0.075 (0.021) | 0.340 (0.110) | 0.325 (0.105) | 0.331 (0.107) | 0.935 (0.038) | 0.920 (0.041) | 0.927 (0.039) | |
| DTLZ3 | 5 | 0.144 (0.112) | 0.150 (0.125) | 0.145 (0.118) | 0.420 (0.095) | 0.398 (0.099) | 0.410 (0.093) | 0.935 (0.031) | 0.920 (0.029) | 0.928 (0.033) |
| 7 | 0.082 (0.029) | 0.089 (0.025) | 0.085 (0.030) | 0.398 (0.091) | 0.385 (0.094) | 0.392 (0.089) | 0.921 (0.036) | 0.907 (0.034) | 0.914 (0.035) | |
| 10 | 0.062 (0.027) | 0.067 (0.024) | 0.065 (0.026) | 0.380 (0.087) | 0.362 (0.085) | 0.372 (0.083) | 0.913 (0.034) | 0.898 (0.038) | 0.905 (0.037) | |
| DTLZ4 | 5 | 0.052 (0.021) | 0.050 (0.023) | 0.054 (0.022) | 0.391 (0.120) | 0.375 (0.102) | 0.382 (0.115) | 0.955 (0.037) | 0.947 (0.039) | 0.951 (0.038) |
| 7 | 0.063 (0.024) | 0.068 (0.021) | 0.065 (0.022) | 0.362 (0.101) | 0.348 (0.104) | 0.356 (0.112) | 0.948 (0.041) | 0.940 (0.038) | 0.945 (0.036) | |
| 10 | 0.058 (0.020) | 0.062 (0.019) | 0.060 (0.021) | 0.340 (0.110) | 0.325 (0.105) | 0.331 (0.107) | 0.940 (0.038) | 0.932 (0.041) | 0.937 (0.039) | |
| DTLZ5 | 5 | 0.048 (0.018) | 0.045 (0.017) | 0.049 (0.019) | 0.391 (0.120) | 0.375 (0.102) | 0.382 (0.115) | 0.962 (0.037) | 0.954 (0.040) | 0.958 (0.039) |
| 7 | 0.053 (0.020) | 0.056 (0.018) | 0.058 (0.023) | 0.362 (0.101) | 0.348 (0.104) | 0.356 (0.112) | 0.952 (0.041) | 0.946 (0.038) | 0.949 (0.036) | |
| 10 | 0.048 (0.016) | 0.052 (0.019) | 0.050 (0.021) | 0.340 (0.110) | 0.325 (0.105) | 0.331 (0.107) | 0.947 (0.038) | 0.938 (0.041) | 0.944 (0.039) | |
| DTLZ6 | 5 | 0.082 (0.031) | 0.086 (0.029) | 0.084 (0.027) | 0.430 (0.092) | 0.415 (0.095) | 0.422 (0.089) | 0.928 (0.033) | 0.915 (0.031) | 0.920 (0.034) |
| 7 | 0.072 (0.026) | 0.078 (0.024) | 0.074 (0.025) | 0.420 (0.089) | 0.405 (0.085) | 0.410 (0.090) | 0.916 (0.035) | 0.905 (0.032) | 0.910 (0.033) | |
| 10 | 0.066 (0.025) | 0.070 (0.027) | 0.069 (0.028) | 0.405 (0.091) | 0.392 (0.089) | 0.398 (0.092) | 0.910 (0.036) | 0.900 (0.034) | 0.907 (0.032) | |
| DTLZ7 | 5 | 0.062 (0.023) | 0.067 (0.021) | 0.065 (0.022) | 0.398 (0.095) | 0.385 (0.093) | 0.390 (0.092) | 0.935 (0.032) | 0.920 (0.029) | 0.930 (0.031) |
| 7 | 0.054 (0.020) | 0.058 (0.022) | 0.056 (0.021) | 0.388 (0.093) | 0.372 (0.090) | 0.380 (0.091) | 0.928 (0.031) | 0.915 (0.033) | 0.923 (0.032) | |
| 10 | 0.048 (0.018) | 0.052 (0.019) | 0.051 (0.020) | 0.372 (0.092) | 0.358 (0.094) | 0.364 (0.089) | 0.920 (0.030) | 0.905 (0.031) | 0.912 (0.030) | |
| DTLZ8 | 5 | 0.077 (0.030) | 0.081 (0.028) | 0.080 (0.029) | 0.410 (0.098) | 0.392 (0.095) | 0.405 (0.093) | 0.945 (0.028) | 0.930 (0.027) | 0.937 (0.029) |
| 7 | 0.070 (0.025) | 0.073 (0.022) | 0.075 (0.024) | 0.398 (0.095) | 0.380 (0.093) | 0.390 (0.094) | 0.938 (0.027) | 0.925 (0.030) | 0.932 (0.028) | |
| 10 | 0.063 (0.024) | 0.068 (0.026) | 0.066 (0.023) | 0.390 (0.097) | 0.375 (0.096) | 0.382 (0.092) | 0.930 (0.029) | 0.920 (0.028) | 0.925 (0.030) | |
| DTLZ9 | 5 | 0.055 (0.022) | 0.057 (0.021) | 0.059 (0.023) | 0.385 (0.092) | 0.370 (0.089) | 0.378 (0.091) | 0.960 (0.031) | 0.950 (0.030) | 0.955 (0.032) |
| 7 | 0.050 (0.020) | 0.053 (0.019) | 0.054 (0.021) | 0.378 (0.090) | 0.365 (0.088) | 0.372 (0.087) | 0.952 (0.033) | 0.942 (0.034) | 0.948 (0.035) | |
| 10 | 0.048 (0.019) | 0.051 (0.018) | 0.049 (0.020) | 0.370 (0.089) | 0.358 (0.091) | 0.365 (0.093) | 0.945 (0.032) | 0.935 (0.031) | 0.940 (0.033) |
| Problem | Objectives | MaOHHO (IGD) | NSGA-III (IGD) | MOEA/D-DRA (IGD) |
|---|---|---|---|---|
| DTLZ1 | 5 | 0.015 | 0.020 | 0.018 |
| 7 | 0.012 | 0.017 | 0.016 | |
| 10 | 0.010 | 0.015 | 0.013 | |
| DTLZ2 | 5 | 0.013 | 0.018 | 0.016 |
| 7 | 0.011 | 0.015 | 0.014 | |
| 10 | 0.009 | 0.013 | 0.012 | |
| DTLZ3 | 5 | 0.017 | 0.022 | 0.019 |
| 7 | 0.014 | 0.019 | 0.017 | |
| 10 | 0.011 | 0.017 | 0.015 | |
| DTLZ4 | 5 | 0.014 | 0.018 | 0.016 |
| 7 | 0.012 | 0.016 | 0.014 | |
| 10 | 0.010 | 0.014 | 0.012 | |
| DTLZ5 | 5 | 0.015 | 0.019 | 0.017 |
| 7 | 0.013 | 0.017 | 0.015 | |
| 10 | 0.011 | 0.015 | 0.013 | |
| DTLZ6 | 5 | 0.018 | 0.023 | 0.020 |
| 7 | 0.016 | 0.020 | 0.018 | |
| 10 | 0.014 | 0.018 | 0.016 | |
| DTLZ7 | 5 | 0.012 | 0.017 | 0.015 |
| 7 | 0.011 | 0.015 | 0.013 | |
| 10 | 0.009 | 0.013 | 0.011 | |
| DTLZ8 | 5 | 0.014 | 0.019 | 0.016 |
| 7 | 0.012 | 0.016 | 0.014 | |
| 10 | 0.011 | 0.015 | 0.013 | |
| DTLZ9 | 5 | 0.013 | 0.018 | 0.015 |
| 7 | 0.011 | 0.016 | 0.014 | |
| 10 | 0.010 | 0.014 | 0.012 |
| Problem | Objectives (M) | Dimensions (D) | MaOHHO (CPU Time) | NSGA-III (CPU Time) | MOEA/D-DRA (CPU Time) |
|---|---|---|---|---|---|
| DTLZ1 | 5 | 9 | 0.523 (0.013) | 0.865 (0.295) | 2.542 (0.155) |
| 7 | 11 | 0.498 (0.017) | 0.783 (0.311) | 2.437 (0.041) | |
| 10 | 14 | 0.547 (0.027) | 1.074 (0.029) | 2.468 (0.021) | |
| DTLZ2 | 5 | 14 | 0.533 (0.011) | 0.722 (0.037) | 2.361 (0.017) |
| 7 | 16 | 0.552 (0.014) | 0.734 (0.019) | 2.387 (0.019) | |
| 10 | 19 | 0.578 (0.013) | 0.985 (0.148) | 2.432 (0.018) | |
| DTLZ3 | 5 | 14 | 0.505 (0.009) | 0.725 (0.018) | 2.420 (0.021) |
| 7 | 16 | 0.523 (0.018) | 0.788 (0.041) | 2.468 (0.015) | |
| 10 | 19 | 0.582 (0.021) | 1.128 (0.097) | 2.450 (0.012) | |
| DTLZ4 | 5 | 14 | 0.517 (0.011) | 1.018 (0.075) | 2.442 (0.014) |
| 7 | 16 | 0.524 (0.015) | 0.837 (0.167) | 2.470 (0.011) | |
| 10 | 19 | 0.590 (0.021) | 1.094 (0.231) | 2.463 (0.015) | |
| DTLZ5 | 5 | 14 | 0.414 (0.015) | 0.965 (0.035) | 2.489 (0.019) |
| 7 | 16 | 0.451 (0.025) | 1.042 (0.010) | 2.507 (0.025) | |
| 10 | 19 | 0.487 (0.021) | 1.198 (0.043) | 2.501 (0.017) | |
| DTLZ6 | 5 | 14 | 0.465 (0.023) | 0.736 (0.022) | 2.518 (0.024) |
| 7 | 16 | 0.523 (0.018) | 0.814 (0.122) | 2.563 (0.022) | |
| 10 | 19 | 0.550 (0.025) | 1.140 (0.048) | 2.546 (0.020) | |
| DTLZ7 | 5 | 24 | 0.475 (0.025) | 1.019 (0.035) | 2.507 (0.024) |
| 7 | 26 | 0.449 (0.019) | 1.010 (0.042) | 2.531 (0.029) | |
| 10 | 29 | 0.516 (0.024) | 1.195 (0.053) | 2.514 (0.030) | |
| DTLZ8 | 5 | 50 | 0.551 (0.015) | 0.959 (0.025) | 3.022 (0.031) |
| 7 | 70 | 0.587 (0.024) | 1.085 (0.040) | 3.262 (0.020) | |
| 10 | 100 | 0.718 (0.016) | 1.364 (0.027) | 3.572 (0.029) | |
| DTLZ9 | 5 | 50 | 0.565 (0.017) | 0.963 (0.039) | 2.794 (0.015) |
| 7 | 70 | 0.615 (0.021) | 1.188 (0.029) | 2.980 (0.020) | |
| 10 | 100 | 0.772 (0.025) | 1.553 (0.031) | 3.164 (0.027) |
| Variable | MaOHHO | NSGA-III | MOEA/D-DRA |
|---|---|---|---|
| PG2 (MW) | 61.023 | 56.905 | 59.827 |
| PG5 (MW) | 48.102 | 41.251 | 46.893 |
| PG8 (MW) | 34.673 | 35.102 | 35.203 |
| PG11 (MW) | 30.234 | 24.702 | 29.456 |
| PG13 (MW) | 36.012 | 39.764 | 35.887 |
| VG1 (p.u.) | 1.038 | 1.037 | 1.042 |
| VG2 (p.u.) | 1.033 | 1.031 | 1.031 |
| VG5 (p.u.) | 1.008 | 1.033 | 1.006 |
| VG8 (p.u.) | 1.016 | 1.002 | 1.014 |
| VG11 (p.u.) | 1.022 | 1.052 | 1.023 |
| VG13 (p.u.) | 1.027 | 1.025 | 1.024 |
| QC10 (p.u.) | 4.920 | 2.465 | 4.815 |
| QC12 (p.u.) | 3.198 | 3.276 | 3.462 |
| QC15 (p.u.) | 0.812 | 2.715 | 1.167 |
| QC17 (p.u.) | 3.916 | 1.086 | 3.913 |
| QC20 (p.u.) | 4.982 | 3.173 | 4.958 |
| QC21 (p.u.) | 4.495 | 4.967 | 4.832 |
| QC23 (p.u.) | 2.180 | 3.058 | 2.179 |
| QC24 (p.u.) | 4.210 | 0.172 | 4.201 |
| QC29 (p.u.) | 0.820 | 4.705 | 0.824 |
| T11 (p.u.) | 1.007 | 0.987 | 1.004 |
| Function | MaOHHO | NSGA-III | MOEA/D-DRA |
| Total Fuel Cost (TFC) ($/h) | 912.89 | 936.56 | 947.21 |
| Total Emission (TE) | 0.205 | 0.208 | 0.207 |
| Active Power Loss (APL) (MW) | 3.946 | 3.723 | 3.428 |
| Reactive Power Loss (RPL) | 7.123 | 0.402 | −0.491 |
| Voltage Magnitude Dev. (VMD) | 0.398 | 0.278 | 0.590 |
| Voltage Stability Index (VSI) | 0.154 | 0.150 | 0.139 |
| Metric | Problem | Objectives | MaOHHO | NSGA-III | MOEA/D-DRA | Friedman Rank Test Value |
|---|---|---|---|---|---|---|
| GD (Generational Distance) | DTLZ1 | 5 | 6.110 × 104 (5.18 × 10−4) | 1.424 × 10−3 (1.64 × 10−4) | 4.340 × 10−4 (2.52 × 10−5) | 156.2 |
| DTLZ2 | 7 | 1.120 × 10−2 (1.98 × 10−3) | 6.570 × 10−3 (4.96 × 10−4) | 6.220 × 10−3 (6.37 × 10−4) | 224.8 | |
| DTLZ3 | 10 | 7.120 × 10−1 (5.16 × 10−3) | 7.020 × 10−1 (1.68 × 10−3) | 7.150 × 10−1 (2.86 × 10−4) | 282.1 | |
| SP (Spread) | DTLZ4 | 5 | 2.114 × 10−4 (1.15 × 10−4) | 3.211 × 10−4 (1.84 × 10−4) | 3.910 × 10−4 (2.73 × 10−5) | 148.5 |
| DTLZ5 | 7 | 1.010 × 10−2 (1.95 × 10−3) | 5.670 × 10−3 (3.96 × 10−4) | 5.810 × 10−3 (5.39 × 10−4) | 174.7 | |
| DTLZ6 | 10 | 5.327 × 10−1 (3.18 × 10−3) | 5.423 × 10−1 (2.17 × 10−3) | 5.920 × 10−1 (3.26 × 10−4) | 162.3 | |
| HV (Hypervolume) | DTLZ7 | 5 | 8.214 × 10−1 (5.28 × 10−4) | 7.211 × 10−1 (4.24 × 10−4) | 7.820 × 10−1 (5.12 × 10−4) | 348.1 |
| DTLZ8 | 7 | 9.410 × 10−1 (3.28 × 10−4) | 8.623 × 10−1 (2.74 × 10−4) | 9.117 × 10−1 (4.02 × 10−4) | 284.2 | |
| DTLZ9 | 10 | 1.021 × 10−1 (7.14 × 10−4) | 1.002 × 10−1 (6.78 × 10−4) | 1.113 × 10−1 (5.14 × 10−4) | 176.8 |
| Algorithm | GD | SP | Friedman Rank | HV |
|---|---|---|---|---|
| MaOHHO | 0.023 | 0.012 | 1.5 | 0.982 |
| NSGA-III | 0.031 | 0.015 | 2.0 | 0.965 |
| MOEA/D-DRA | 0.027 | 0.013 | 2.5 | 0.972 |
| Algorithm | GD | SP | Friedman Rank | HV |
|---|---|---|---|---|
| MaOHHO | 0.019 | 0.009 | 1.3 | 0.990 |
| NSGA-III | 0.028 | 0.014 | 2.1 | 0.975 |
| MOEA/D-DRA | 0.025 | 0.011 | 2.6 | 0.980 |
| Algorithm | Problem | Objectives | IGD (Mean ± Std Dev) |
|---|---|---|---|
| MaOHHO | MaO-OPF | 6 | 0.010 ± 0.002 |
| NSGA-III | MaO-OPF | 6 | 0.020 ± 0.004 |
| MOEA/D-DRA | MaO-OPF | 6 | 0.017 ± 0.003 |
| Algorithm | GD | SP | HV | IGD |
|---|---|---|---|---|
| MaOHHO | 0.019 | 0.009 | 0.990 | 0.010 ± 0.002 |
| NSGA-III | 0.028 | 0.014 | 0.975 | 0.020 ± 0.004 |
| MOEA/D-DRA | 0.025 | 0.011 | 0.980 | 0.017 ± 0.003 |
| Pareto-based | 0.021 | 0.010 | 0.985 | 0.015 ± 0.003 |
| Test System | GD (Generational Distance) | SP (Spread) | HV (Hypervolume) | Convergence Rate (%) |
|---|---|---|---|---|
| IEEE 14-Bus | 0.021 | 0.012 | 0.985 | 98.5 |
| IEEE 30-Bus | 0.019 | 0.009 | 0.990 | 99.0 |
| IEEE 57-Bus | 0.024 | 0.014 | 0.975 | 97.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsokhiry, F. Leveraging Harris Hawks Optimization for Enhanced Multi-Objective Optimal Power Flow in Complex Power Systems. Energies 2025, 18, 18. https://doi.org/10.3390/en18010018
Alsokhiry F. Leveraging Harris Hawks Optimization for Enhanced Multi-Objective Optimal Power Flow in Complex Power Systems. Energies. 2025; 18(1):18. https://doi.org/10.3390/en18010018
Chicago/Turabian StyleAlsokhiry, Fahad. 2025. "Leveraging Harris Hawks Optimization for Enhanced Multi-Objective Optimal Power Flow in Complex Power Systems" Energies 18, no. 1: 18. https://doi.org/10.3390/en18010018
APA StyleAlsokhiry, F. (2025). Leveraging Harris Hawks Optimization for Enhanced Multi-Objective Optimal Power Flow in Complex Power Systems. Energies, 18(1), 18. https://doi.org/10.3390/en18010018