1. Introduction
In recent decades, advancements in both experimental and computational research have facilitated a comprehensive examination of the fundamental physical processes taking place within spark-ignition (SI) internal combustion engines (ICEs) [
1,
2,
3]. In the field of ICE, researchers often rely on single-cylinder optical access engines to perform a morphological analysis of the flame front evolution [
4,
5]. The identification of kernel formations holds significant importance in assessing the ability of an igniter to guarantee strong combustion events [
6], particularly in critical operating conditions such as lean–ultra-lean fuel mixtures [
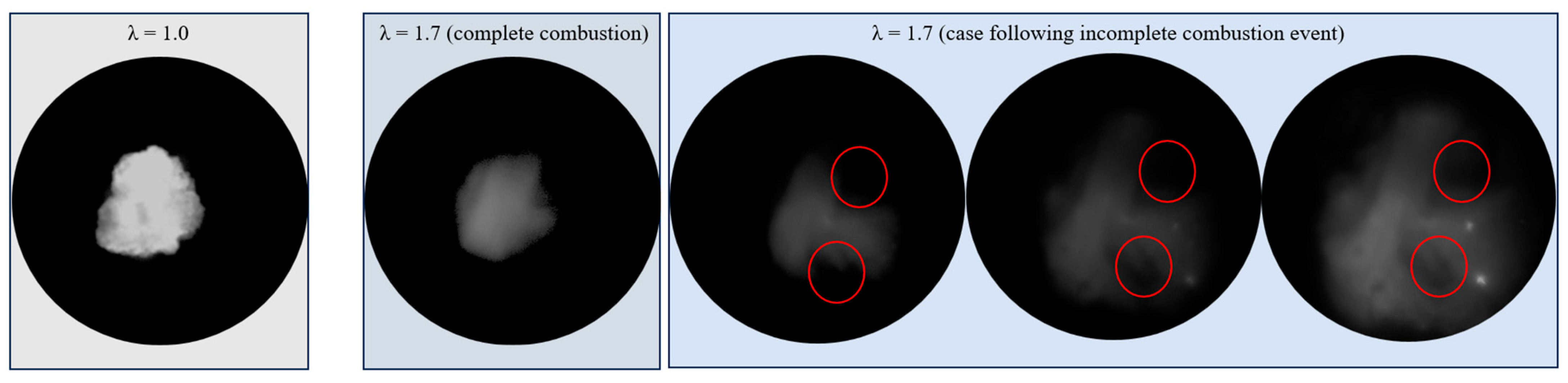
7]. These conditions, characterized by low luminosity, notably hinder the recognition of combustion evolution, particularly in capturing the early stages of flame development. Moreover, the opacity of the images, caused by the accumulation of residues on the piston head together with reflections from objects inside the combustion chamber, complicates the observation process, intensifying the haze effect with each cycle [
8]. The challenges in successfully detecting the physical aspects of flame front evolution therefore require robust and advanced techniques. At present, Machine Learning (ML) sees growing utilization in controlling engine parameters [
9], categorizing images [
10], eliminating background noise [
11], and identifying objects and edges [
12]. Concerning the latter, the literature shows the promising results of deep learning algorithms based on a Convolutional Neural Network (CNN) [
13,
14].
In previous works of the same research group [
15], ML algorithms with CNN structures were employed to detect the flame front evolving in a single-cylinder optical access engine and the corresponding performance compared with the ones obtained through the utilization of a semi-automatic algorithm proposed by Shawal et al. [
16] and used as a base reference. The results show that the proposed methods identify some combustions, initially marked as misfires or anomalies by the base reference method as valid. This shift allows for a closer examination of the igniter’s performance during the early kernel formation. It creates a strong match between an analysis using indicators and visual imaging. Additionally, metric parameters confirm superiority in accuracy, sensitivity, and specificity [
17] on average of the proposed algorithms, making it more suitable for analyzing ultra-lean combustion, a focal point in automotive research. The algorithms’ automated threshold estimation enhances detailed flame analyses, showcasing their potential in improving combustion analysis techniques. However, the segmentation and labeling process needed for training the abovementioned models required human intervention. This manual effort is time-consuming and introduces subjectivity, potentially affecting the model’s ability to generalize across different datasets or conditions. Moreover, the training of such models demands substantial computational power, particularly when handling a large volume of images or high-resolution data. This necessity for significant computing resources can be costly and time-consuming. Therefore, exploring the potential of diverse approaches is deemed necessary. Employing an autoencoder-based methodology [
18] presents an opportunity to streamline the preprocessing phase, diminishing the reliance on manual segmentation and labeling [
19]. By harnessing the autoencoder’s capacity to autonomously extract meaningful features, this approach could mitigate subjectivity, enhance generalizability across diverse datasets, and curtail the computational resources necessitated during training [
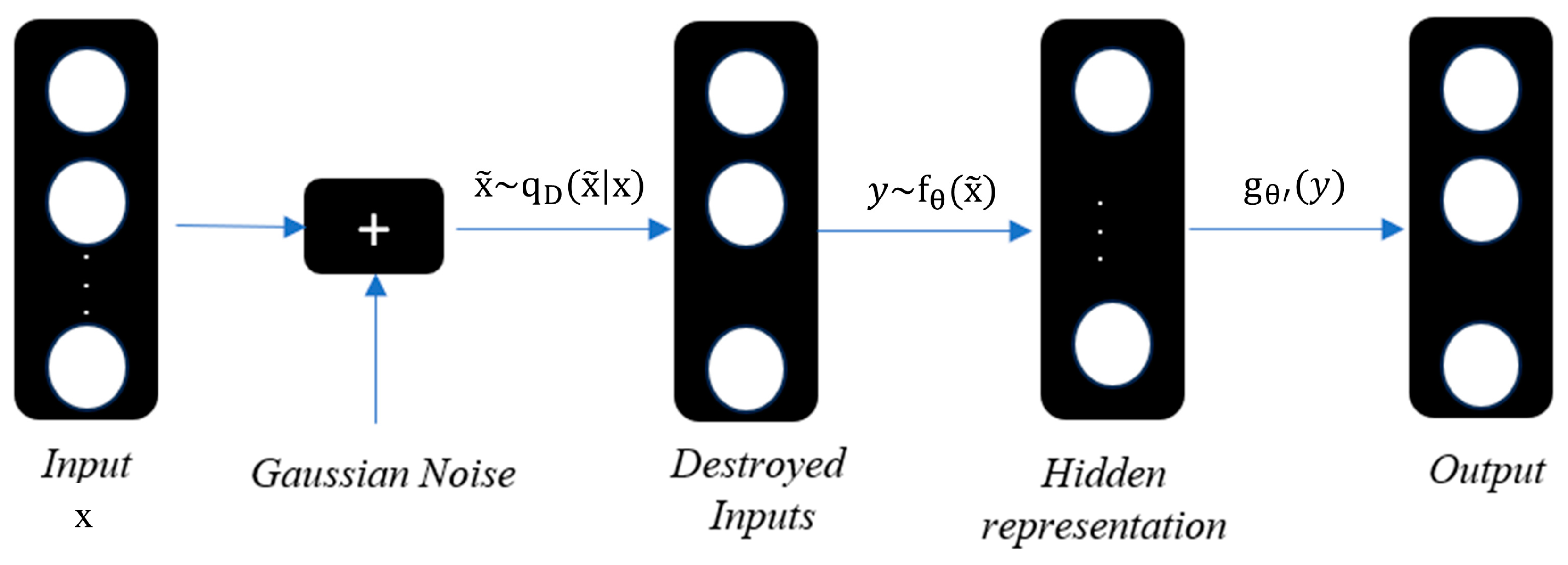
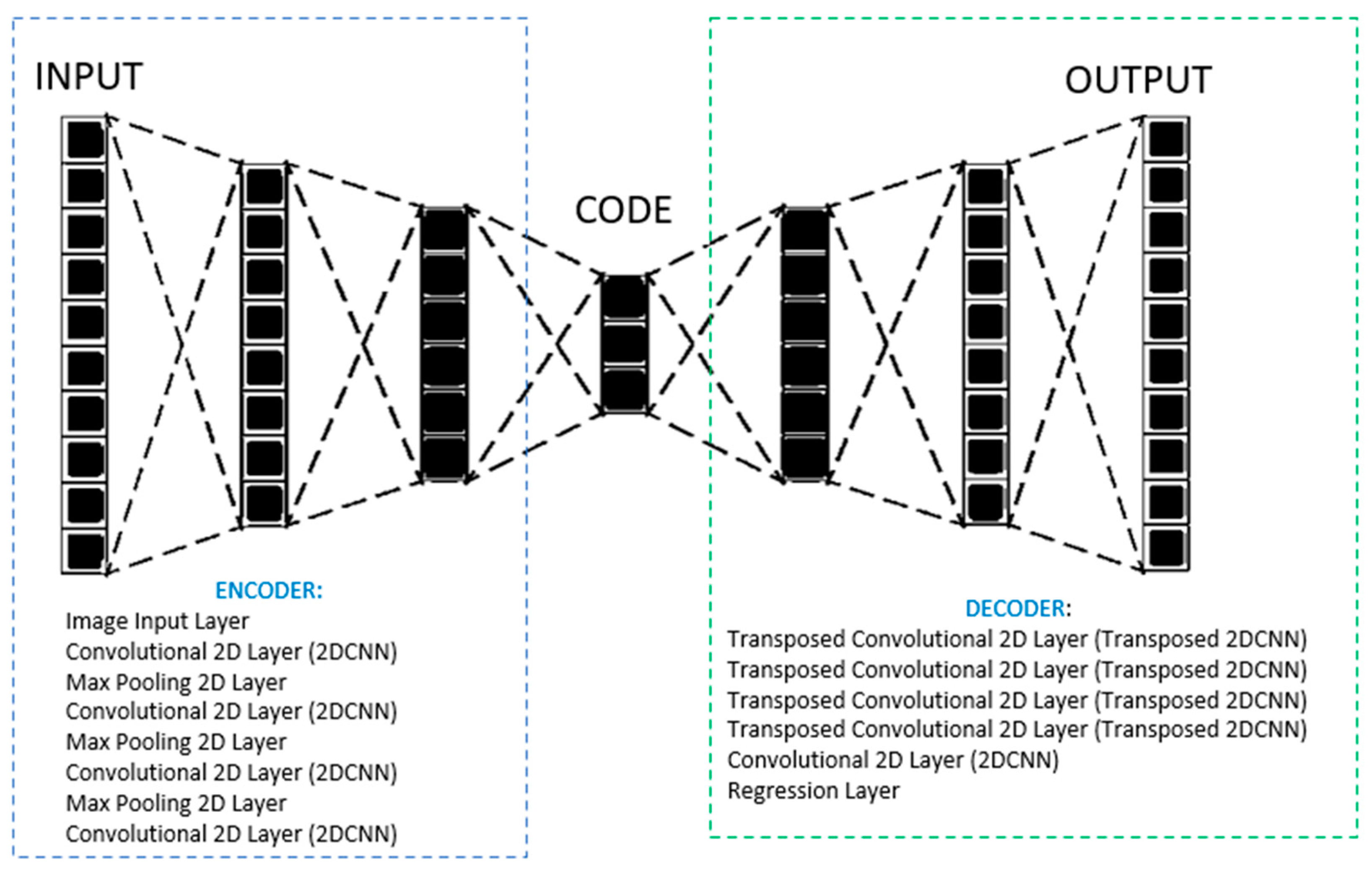
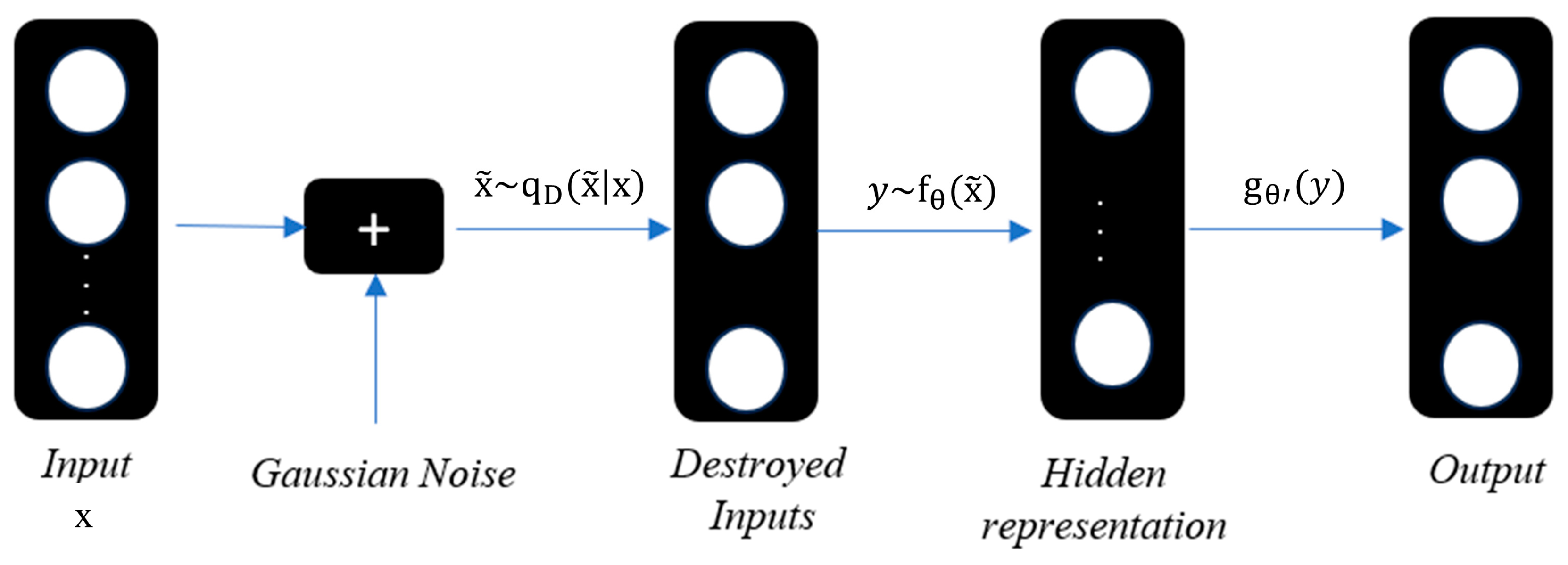
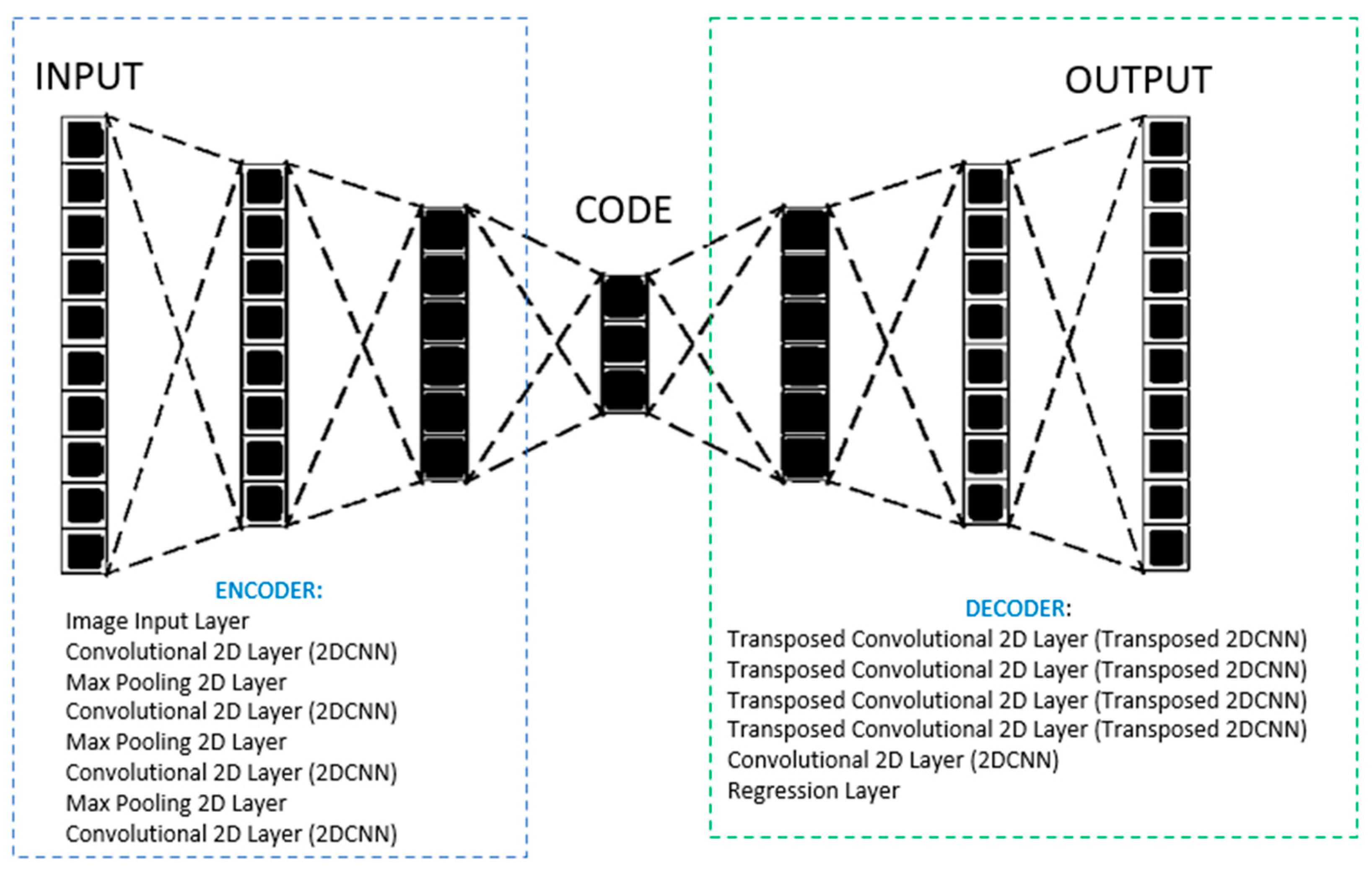
20]. Delving into this path could reveal a better and more adaptable system for identifying flame fronts in a combustion analysis. An autoencoder is a type of artificial neural network used for unsupervised learning, which consists of an encoder and a decoder [
21]. The encoder compresses the input data into a latent space representation, reducing it to its core features. This compressed representation is then decoded by the decoder to reconstruct the original input as accurately as possible. It aims to learn efficient representations of the data by minimizing the reconstruction error between the input and the output [
21]. Karimpouli et al. [
22] enhanced Digital Rock Physics (DRP) segmentation using a convolutional autoencoder algorithm on 20 Berea sandstone images. Through data augmentation, 20,000 realizations were generated. The extended CNN architecture achieved a 96% categorical accuracy on the test set, surpassing conventional methods that utilize thresholding to define separate stages, making it challenging to automatically differentiate them. Cheng et al. [
23] introduced a novel image compression architecture based on a convolutional autoencoder. The design involved a symmetric convolutional autoencoder (CAE) with multiple down-sampling and up-sampling units, replacing conventional transforms. This CAE underwent training using an approximated rate-distortion function to optimize coding efficiency. Additionally, applying a principal component analysis (PCA) to feature maps resulted in a more energy-compact representation, enhancing coding efficiency further. The experiments showcased superior performance, achieving a remarkable 13.7% BD-rate improvement over JPEG2000 on Kodak database images. Posch et al. [
24] employed a variational autoencoder (VAE) to create artificial flow fields for engine combustion simulations. The VAE accurately replicated input data and produced 20 sets of fields for simulations. Results indicated a decrease in variability in VAE-generated cycles compared to the original data: original data showed 1.69% and 1.29% variability in peak firing pressure and MFB 50%, while VAE-generated cycles exhibited 0.65% and 0.71%, respectively. The VAE maintained fundamental physics, surpassing traditional methods in preserving flow field properties.
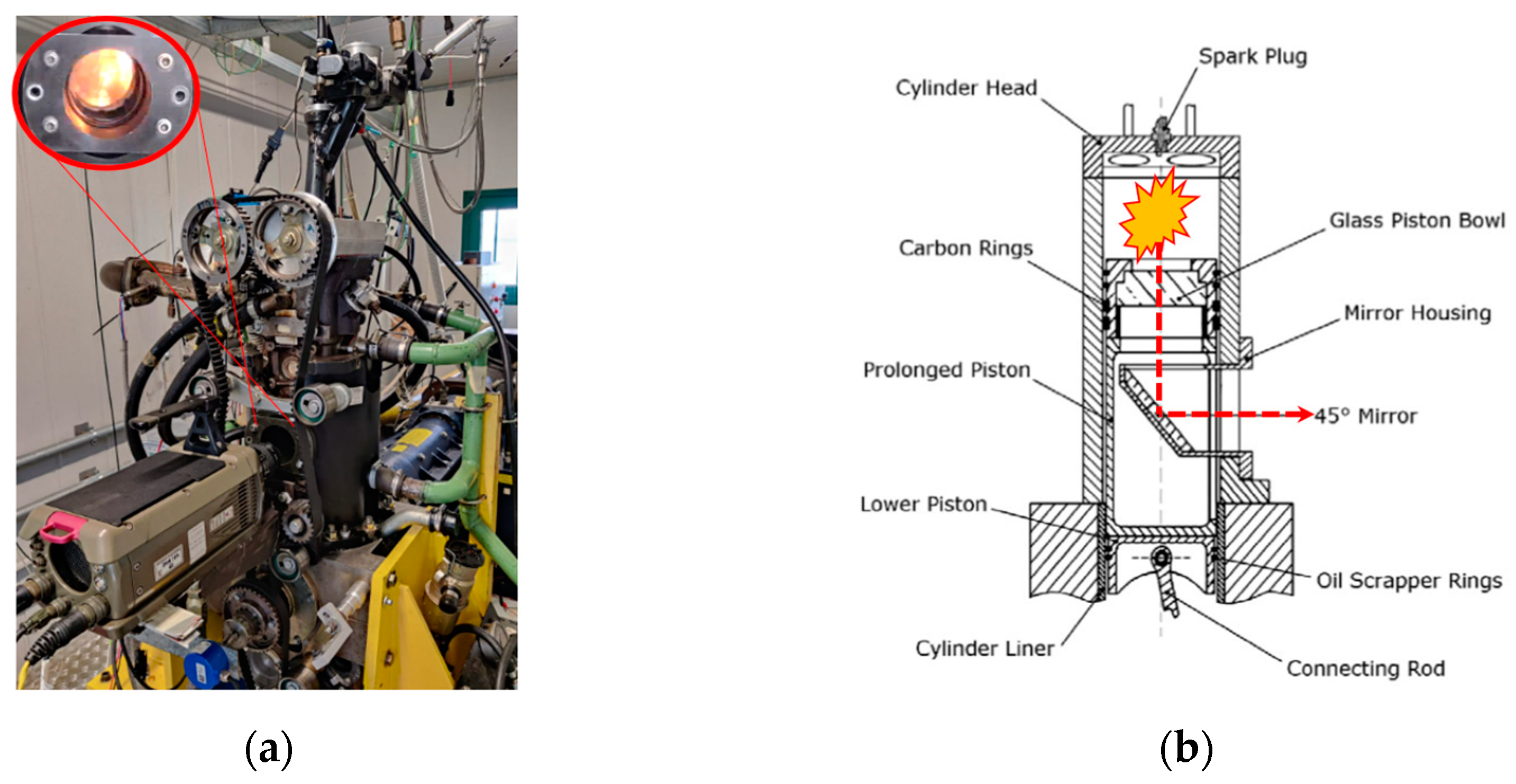
Within this contest, the present work delves into a comprehensive analysis of combustion processes, specifically focusing on the flame front evolution detection of images obtained via a high-speed camera and coming from an optical access engine. This study employs an autoencoder, i.e., an innovative neural network architecture, and operates via unsupervised learning, utilizing an encoder–decoder structure to reconstruct input data, thereby delineating flame fronts. Tests were conducted at 1000 rpm under two different air excess coefficient λ [
25] conditions. The initial evaluation of the proposed ANN algorithm’s performance occurred at λ = 1, while subsequent tests explored lower brightness and critical conditions due to quartz fouling risk, at λ = 1.7. The proposed method eliminates noise effectively, leveraging learned representations within its latent space, resulting in enhanced precision and accuracy compared to the method previously established by the same research group [
26]. This research conducts an in-depth comparison between these methodologies, evaluating their performance through various quantitative metrics. Sensitivity, specificity, and accuracy metrics were employed to gauge the precision in identifying flame pixels, distinguishing edge and non-edge pixels, and overall performance in delineating combustion evolution. The evaluation involved an analysis of over 63 combustion cycles, leveraging both qualitative and quantitative assessments. Results showcase the superiority of the proposed method over the base-reference approach. The autoencoder architecture [
27,
28,
29,
30] (from now on AE) exhibits higher sensitivity levels, indicating its superior capability in accurately identifying pixels outside the flame edge, leading to reduced overestimations if compared to the method used as the base reference (from now on BR). Moreover, AE demonstrates improved accuracy, precisely delineating both edge and non-edge pixels, which significantly enhances the representation of combustion evolution. Notably, the AE method’s robustness and reliability are highlighted by its independence from specific threshold exploration, a requirement in the BR methodology. AE’s automated processing and reliance on learned representations within its latent space eliminate the need for laborious threshold searches, offering enhanced reliability and reduced workload pressures. Furthermore, the comparative analysis with manually obtained binarized images and early flame development assessments consistently affirm AE’s superior performance in accurately reproducing and delineating combustion evolution compared to the established BR method. These findings underscore AE’s potential as a promising methodology for accurate flame front evolution detection in combustion processes.
3. Results and Discussion
First, at λ = 1.0, a randomly selected case from the recorded 63 is chosen to assess AE’s performance against BR.
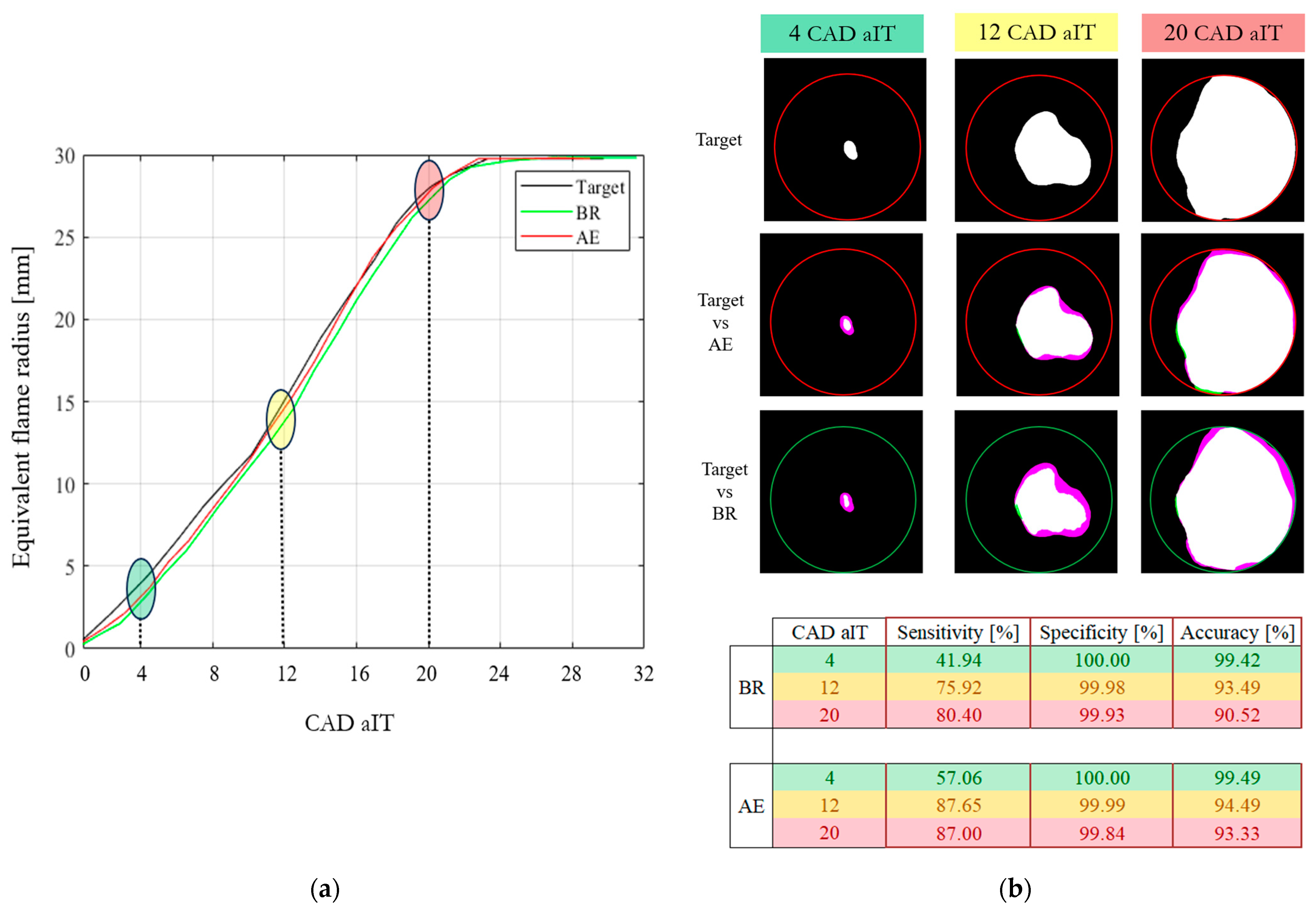
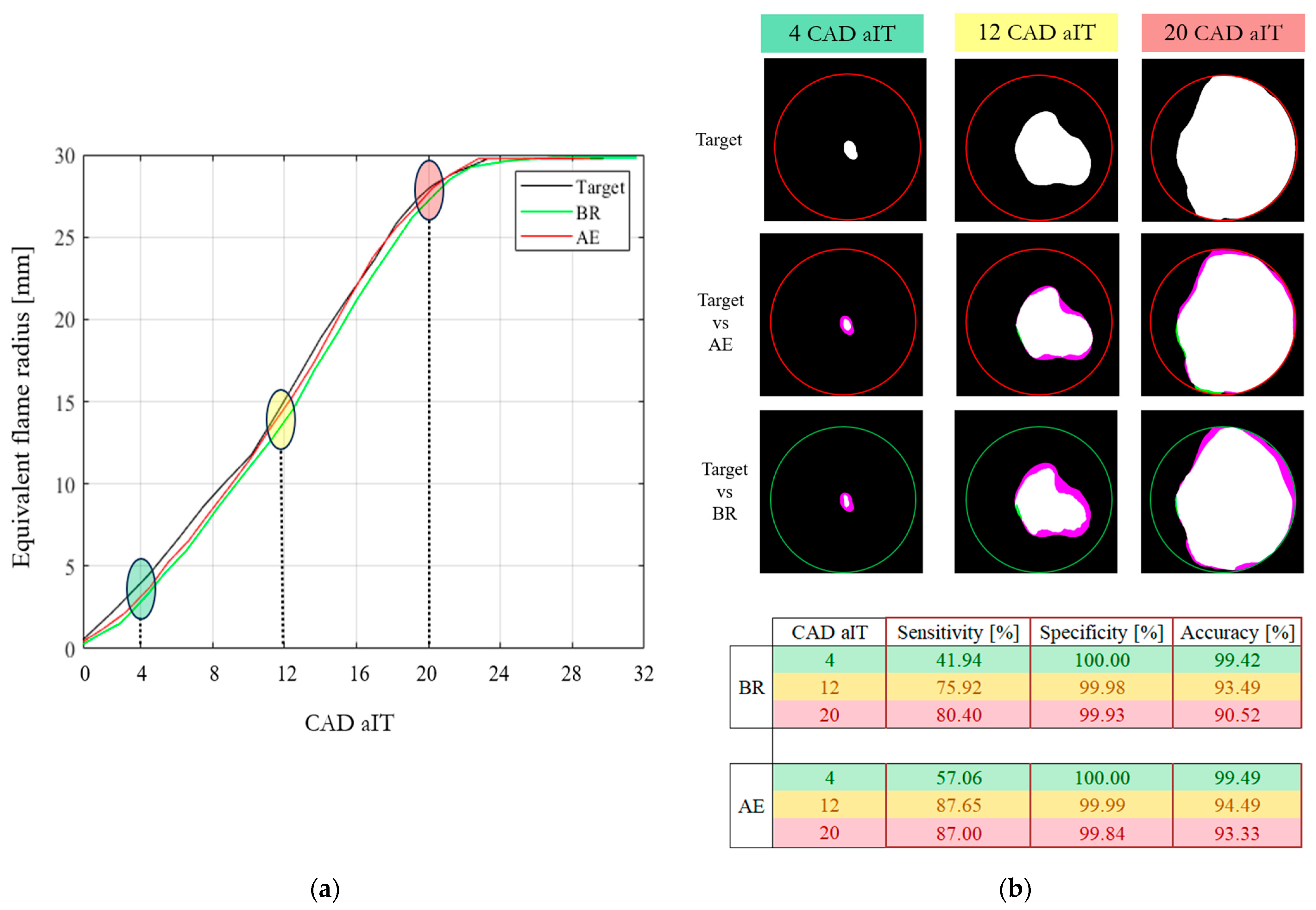
Figure 10a showcases the equivalent flame radius obtained from both methods, represented by the blue curve for BR and the red curve for AE. The target values, employed as a reference (depicted as the black line), will be used for comparison. No appreciable differences are found between the compared approaches.
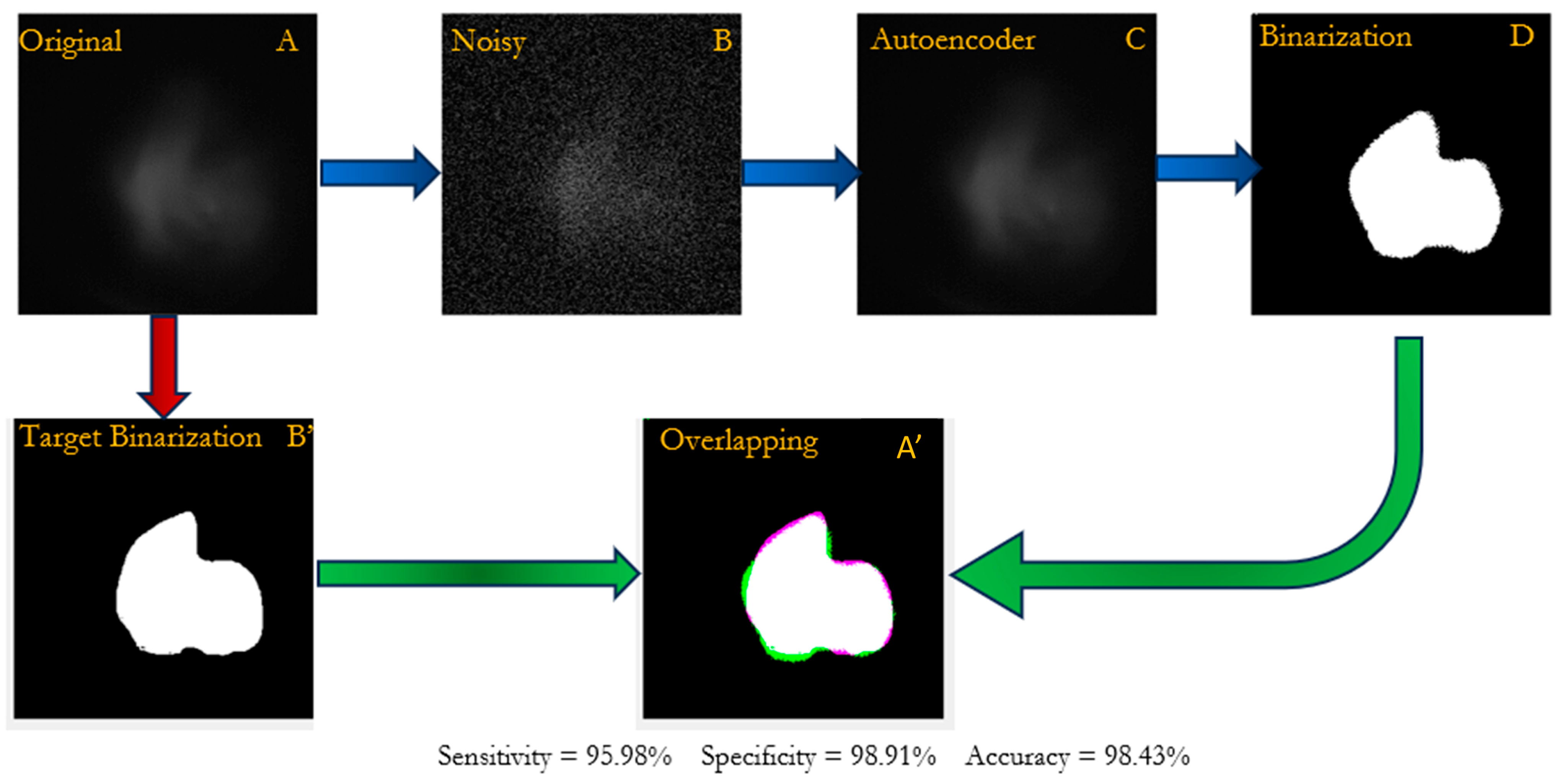
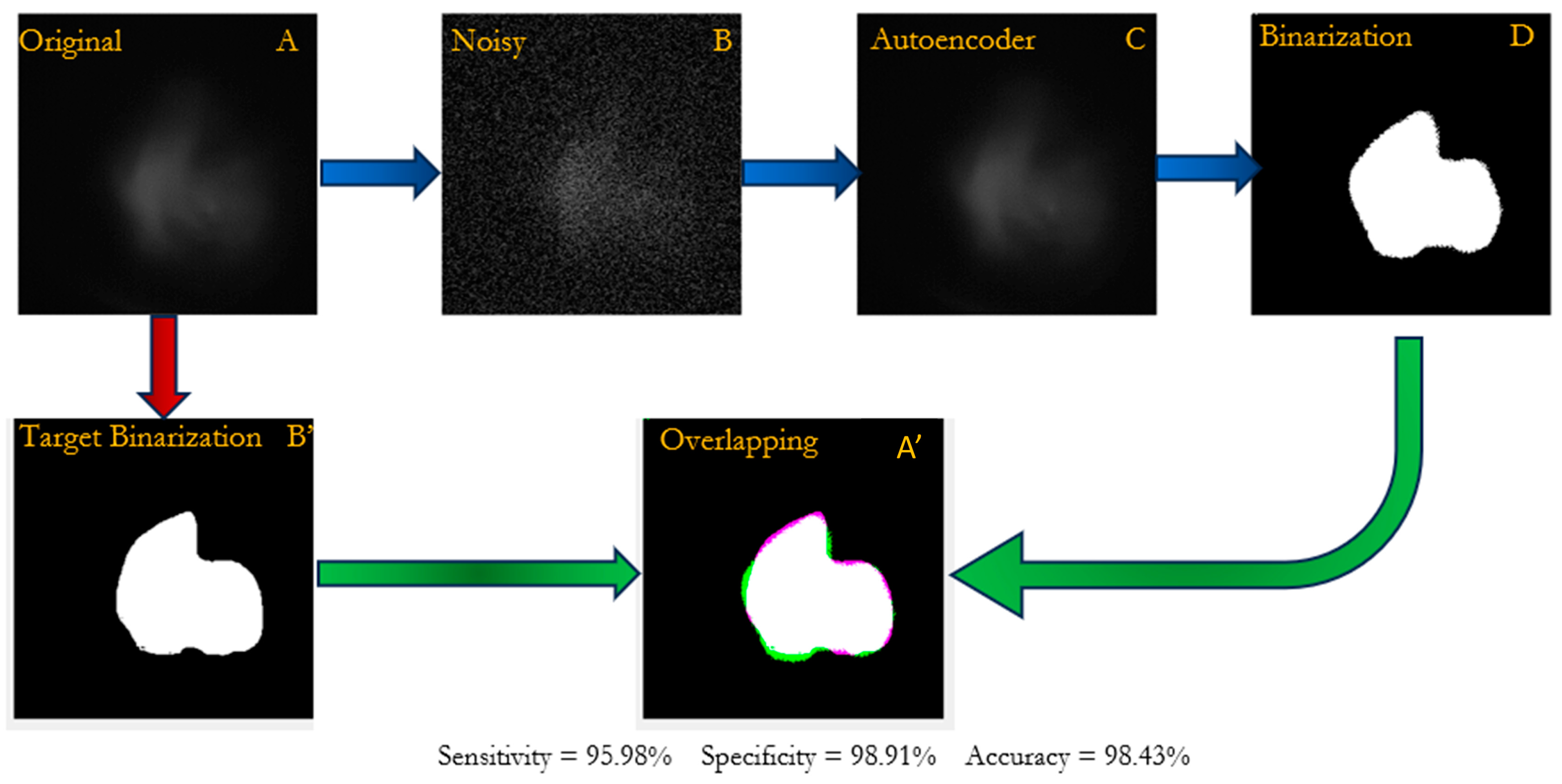
With slight underestimations in the first part of the combustion, i.e., kernel formation, both algorithms prove to be capable of effectively reproducing the target trend. A complementary analysis is carried out by overlapping the corresponding binarized images, as performed in
Figure 9, at three representative frames after the ignition timing (IT), to quantify any over- and underestimations (
Figure 10b).
This additional analysis is necessary to highlight how the proposed method, despite a slight underestimation of the front with respect to the target, still obtains a much better result than the BR method. Starting from the specificity levels, both algorithms show values equal to about 100%, testifying great proficiency in detecting pixels within the target boundary at each shown CAD aIT.
Concerning the sensitivity, the levels gradually increase as the flame front evolves, confirming the initial underestimation performed by both algorithms during the early stage of the combustion and their capability to progressively replicate the target as the process advances.
However, at 4 CAD aIT, there is a noticeable enhancement in AE’s capability to replicate the flame shape compared to BR. Specifically, the sensitivity level indicates an improvement of about 36% in performance by AE over BR (reaching approximately 57% for AE, compared to around 42% for BR).
Progressing further, an increase in BR enhances both sensitivity levels and AE, resulting in approximately a 16% increment at 12 CAD aIT and about an 8% increase at 20 CAD aIT.
The higher sensitivity levels of AE testify its superiority in accurately identifying pixels outside the flame edge as ‘no flame’, thereby indicating lower overestimations made by the proposed structure.
In terms of accuracy, AE exhibits improved performance compared to BR, showcasing a more comprehensive and precise delineation of the combustion evolution. Higher accuracy signifies a more comprehensive measure of the algorithm’s overall performance in correctly identifying both edge and non-edge pixels.
It accounts for true positives, true negatives, false positives, and false negatives, providing an inclusive evaluation of the algorithm’s precision in delineating the combustion evolution accurately.
Due to the impracticality in defining a target curve for all 63 recorded cycles, the outputs of both AE and BR are subsequently compared by considering data coming from the indicating analysis.
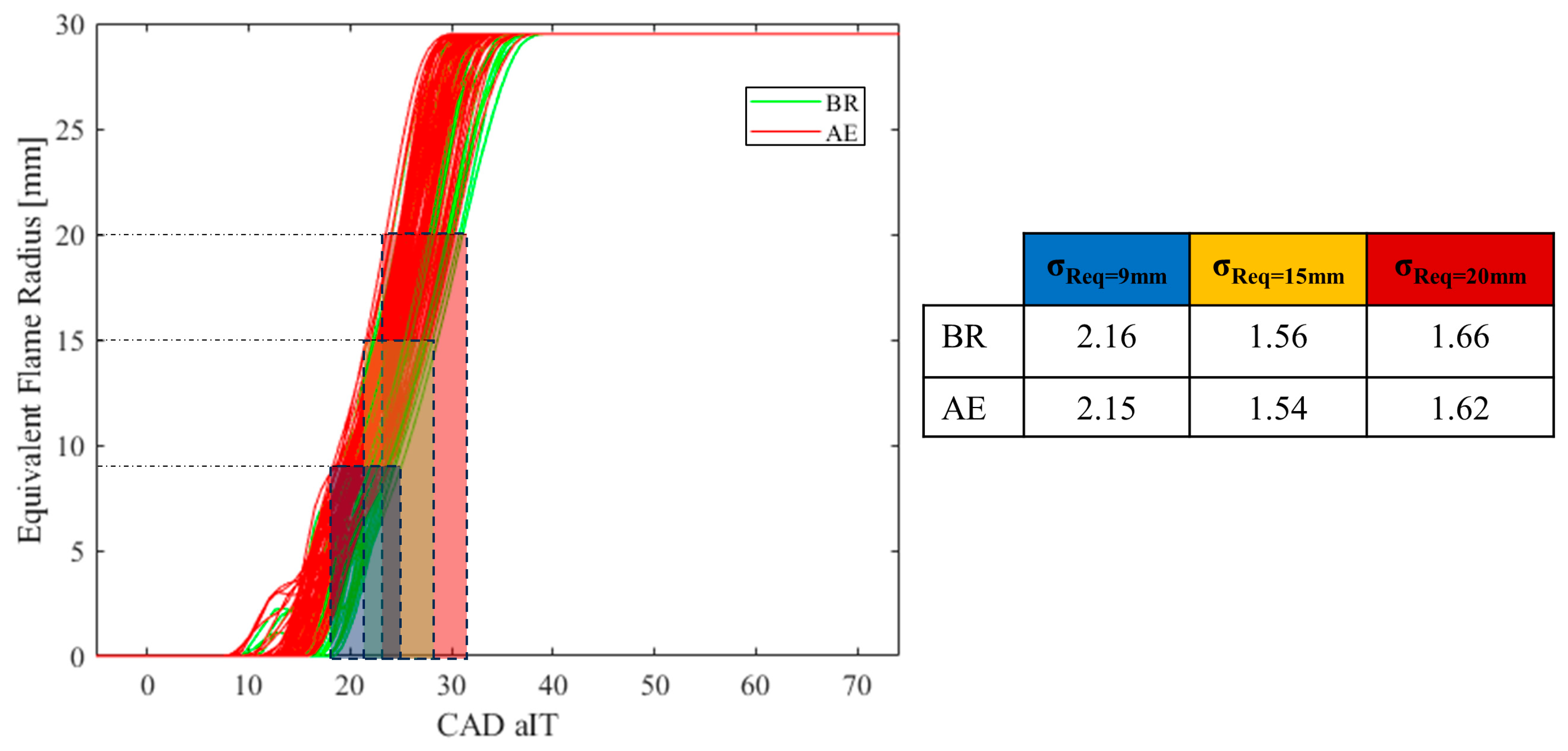
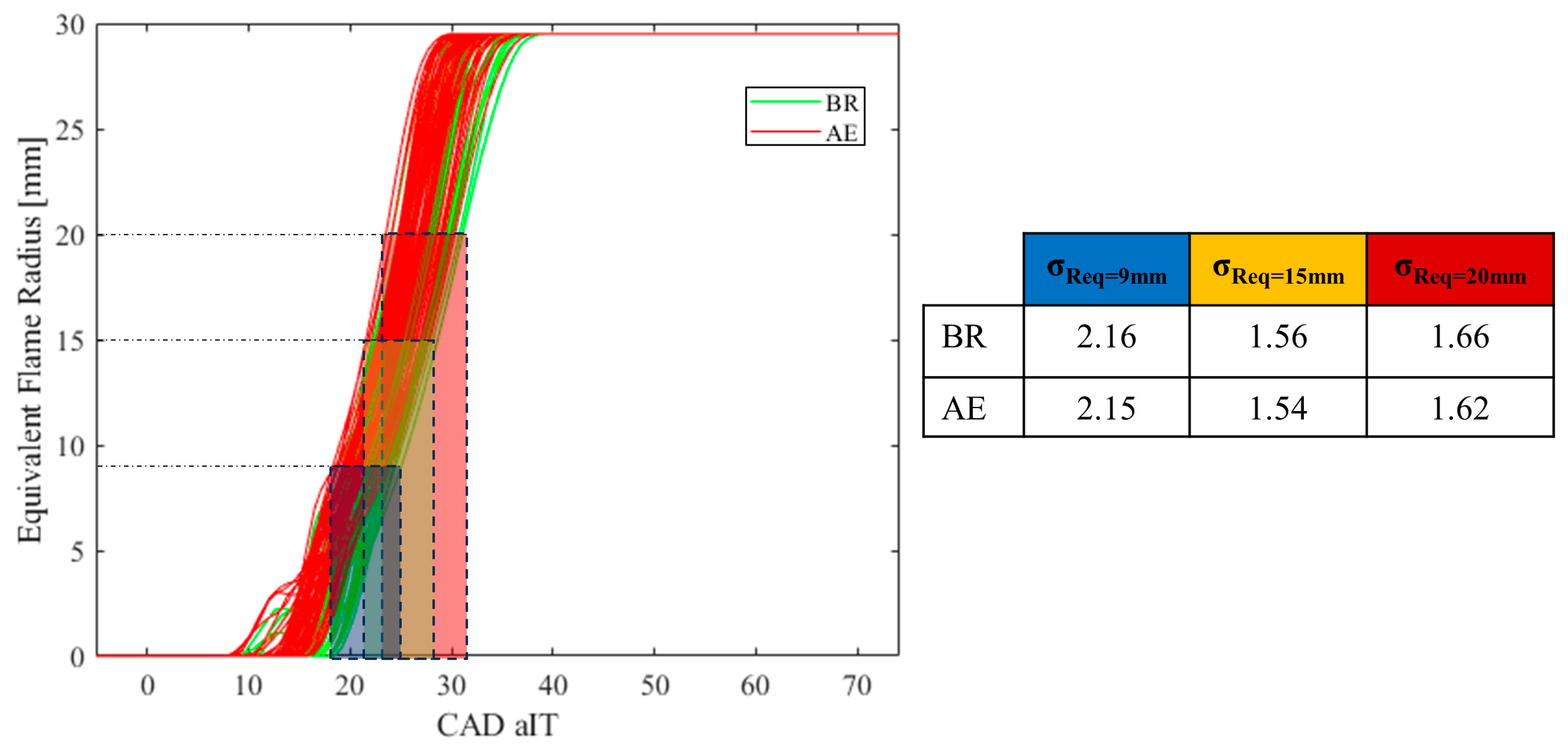
The curves depicted in
Figure 11 represent the trend of the equivalent flame radius for all 63 combustion cases analyzed at λ = 1.0. The curves identified as BR and AE are narrow, indicating low dispersion. Low dispersion suggests high event repeatability, meaning minimal variation from cycle to cycle, consistent with the CoV
IMEP value recorded through the indicated analysis (
Table 2). To quantify which of the two sets is narrower and therefore more faithful to the CoV
IMEP value, we consider the dispersion in CAD when the equivalent front radius is, for instance, equal to 9, 15, and 20 mm, i.e., σ
Req = 9 mm, σ
Req = 15 mm, σ
Req = 20 mm. This involves determining, for each R
eq calculated by both algorithms being compared, the CAD aIT corresponding to the first frame presenting, for example, R
eq ≥ 9, 15, and 20 mm. The uncertainty associated with identifying the CAD aIT where R
eq is equal to or exceeds 9, 15, or 20 mm reflects the variability inherent in the determination process. This variability aligns with the uncertainty observed in the data obtained from the KIBOX system analysis, and notably corresponds to the 0.6 CAD per frame sampling frequency of the high-speed camera. Looking at the three dispersion values displayed in
Figure 11, during the initial flame front growth, both methods demonstrate similar dispersion levels. However, as the equivalent radius reaches 15 mm and 20 mm, AE shows superior performance compared to BR, displaying reduced dispersion values. This outcome could indicate a higher fidelity of AE with the experimental data if compared to BR.
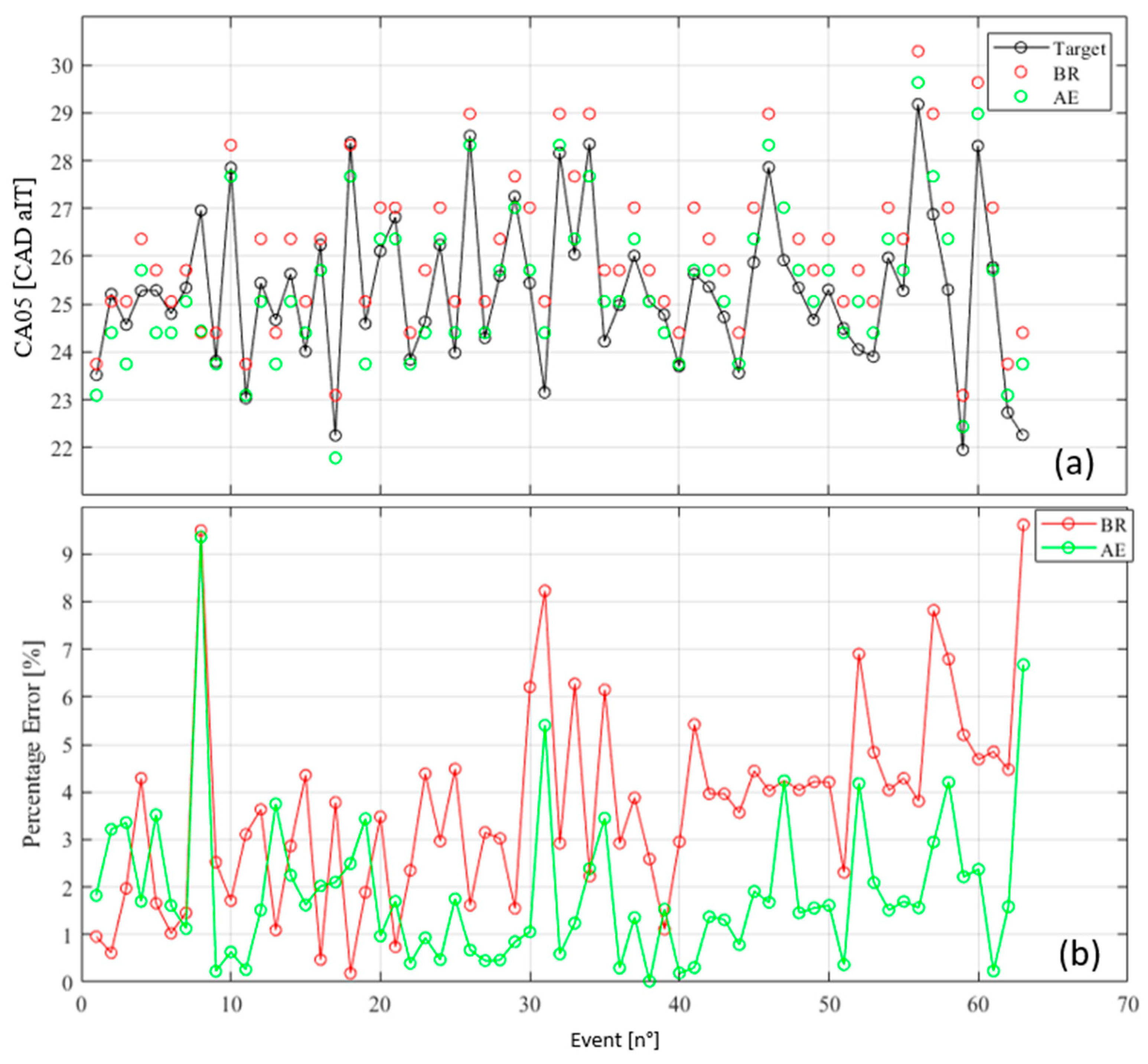
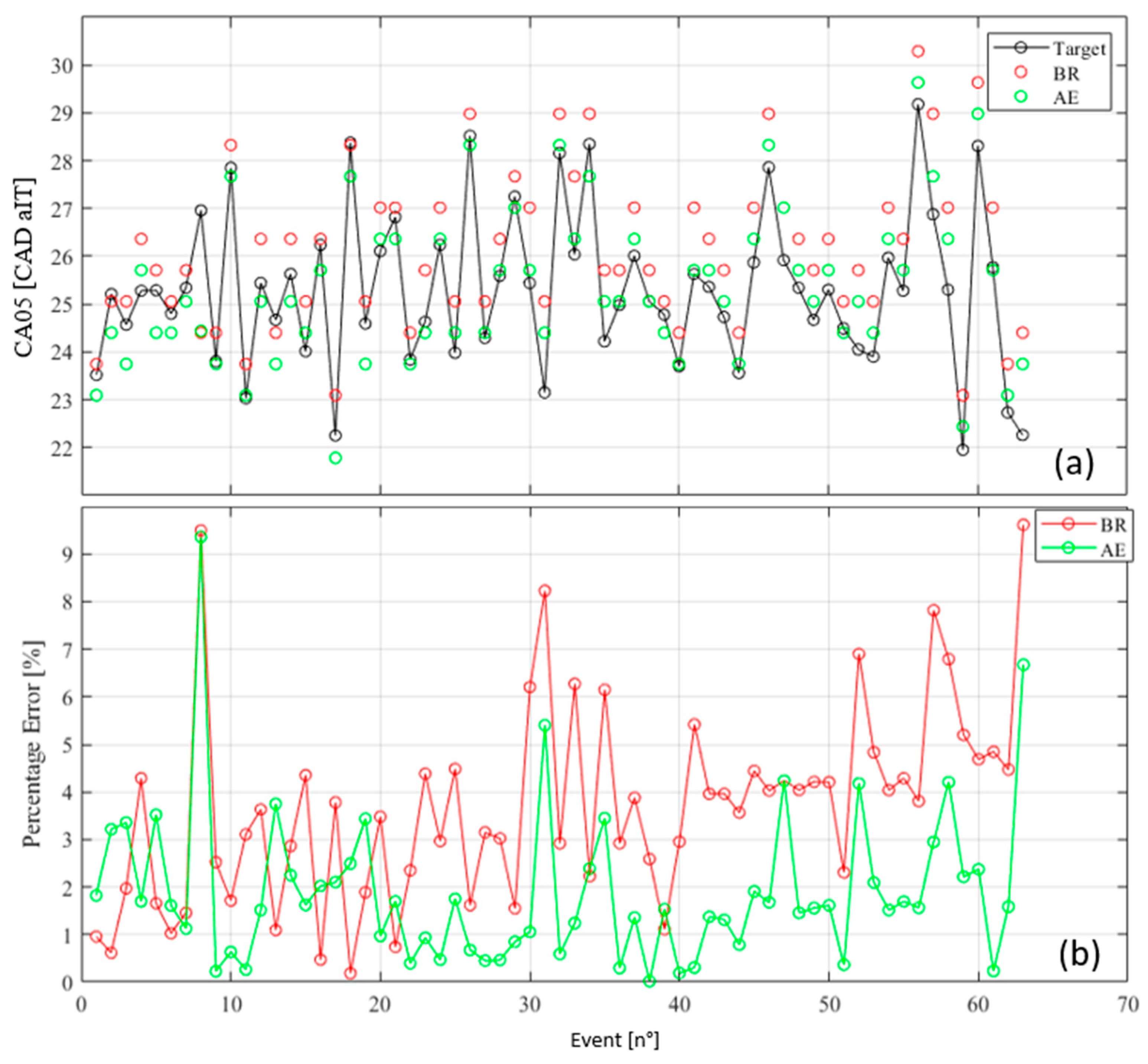
To better emphasize the latter outcome, another analysis can be performed by using the CA05 acquired from the indicating analysis. At λ = 1.0, the CA05 is derived from the equivalent flame radius value R
eq = 20 mm, as detailed in
Section 2 [
26].
Figure 12a presents the CA05 trend observed across the 63 cycles (depicted by black markers) alongside those estimated from the R
eq values generated by both algorithms (green markers for BR and red for AE). Meanwhile,
Figure 12b illustrates the absolute difference (%Err =
) between the estimation of CAD aIT corresponding to the appearance of CA05 performed by the compared algorithm and the target. In this analysis, the CAD aIT of CA05 identified by the indicating system is referred to as the target value.
As observable from the graph, AE demonstrates lesser deviation from the target compared to BR. Specifically, except for a few sporadic instances, the proposed algorithm maintains the difference below 4% in 57 out of 63 cases, equal to 90%. In contrast, BR exhibits a discrepancy exceeding 4% in 40% of the cases. Therefore, this outcome signifies a better alignment of the data from the indicated analysis, indicating a greater confidence of the AE algorithm in physically reproducing the front development.
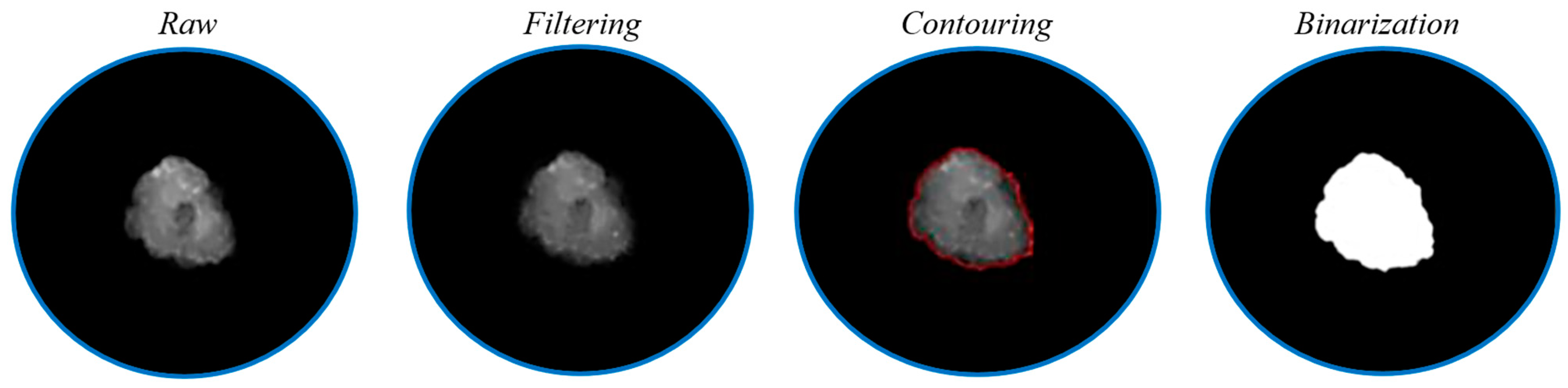
The binarization process following the autoencoder outperforms alternative post-processing methods in flame front evolution detection due to its ability to exploit the learned representations within the autoencoder’s latent space. This process effectively translates the extracted features into a clearer and more distinct delineation of the flame front, resulting in enhanced precision and accuracy compared to other algorithms that might not leverage such learned representations.
Consequently, this approach does not require specific threshold exploration, which can be laborious. For instance, unlike the BR case that necessitates semi-automatic threshold searches, the AE case employs a standard binarization algorithm.
This independence from user intervention results in reduced workload, as the AE process is entirely automated. Further, as evident from the results, this method exhibits greater reliability in its output.
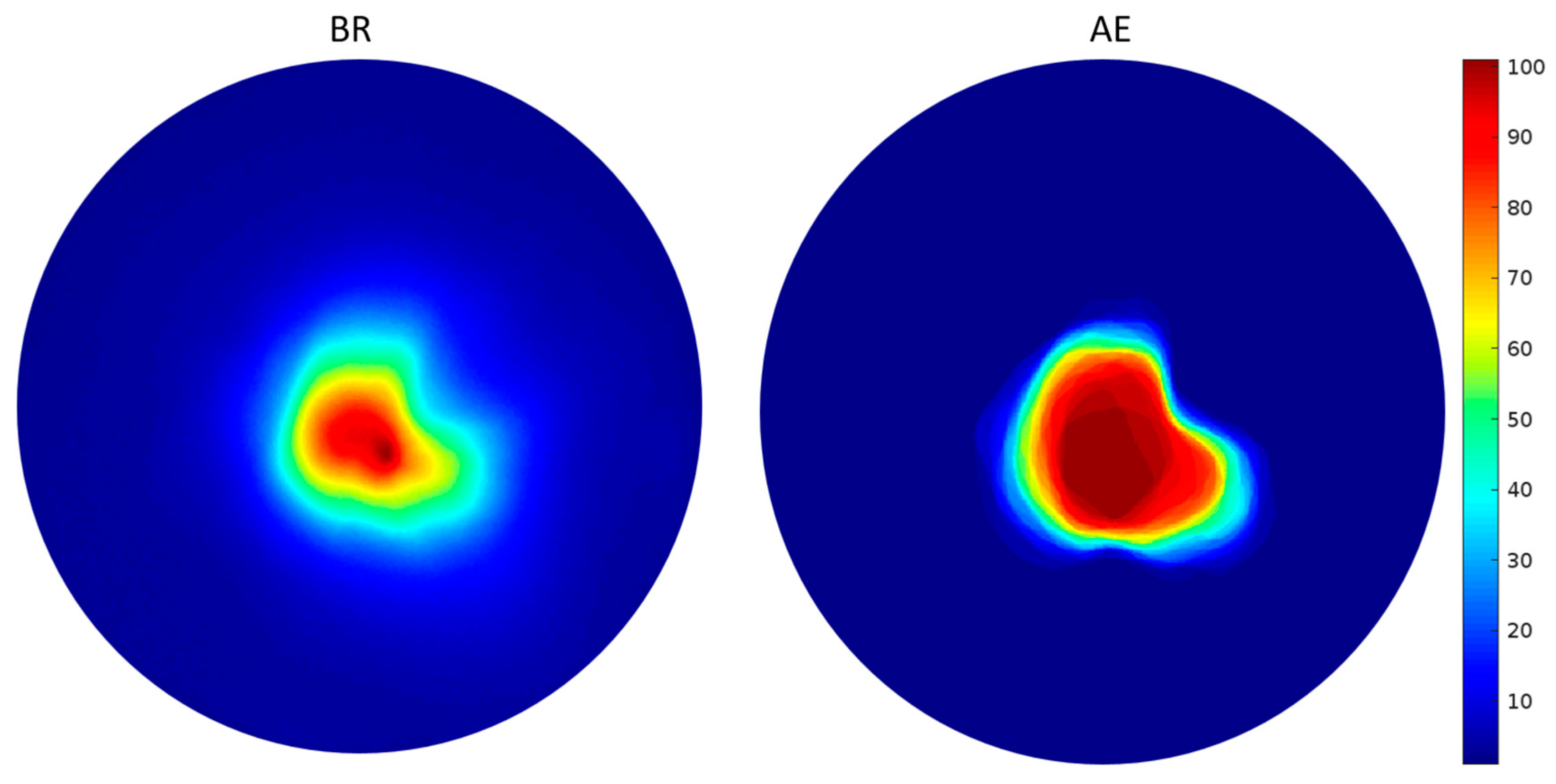
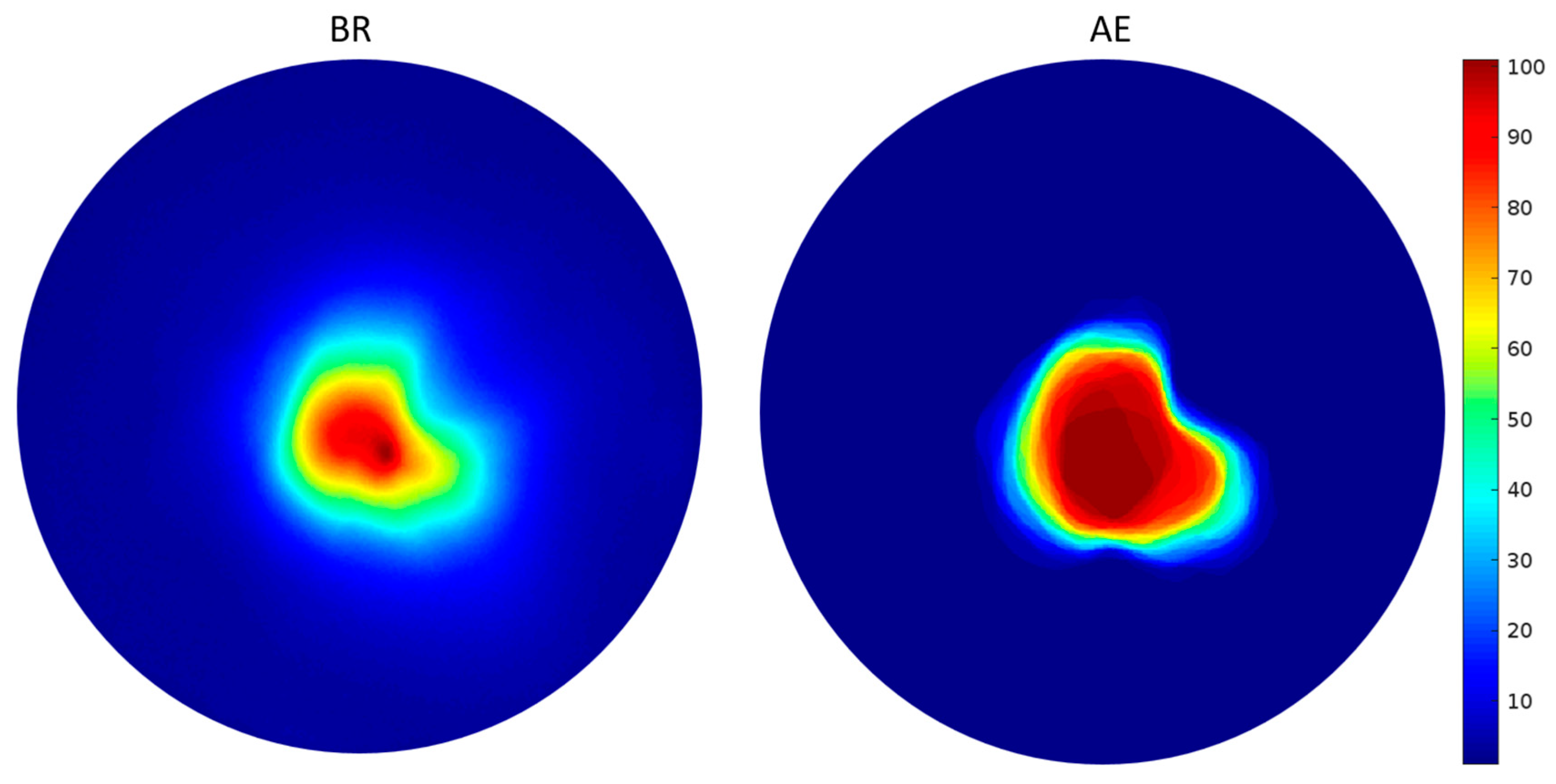
To better emphasize the obtained outcomes,
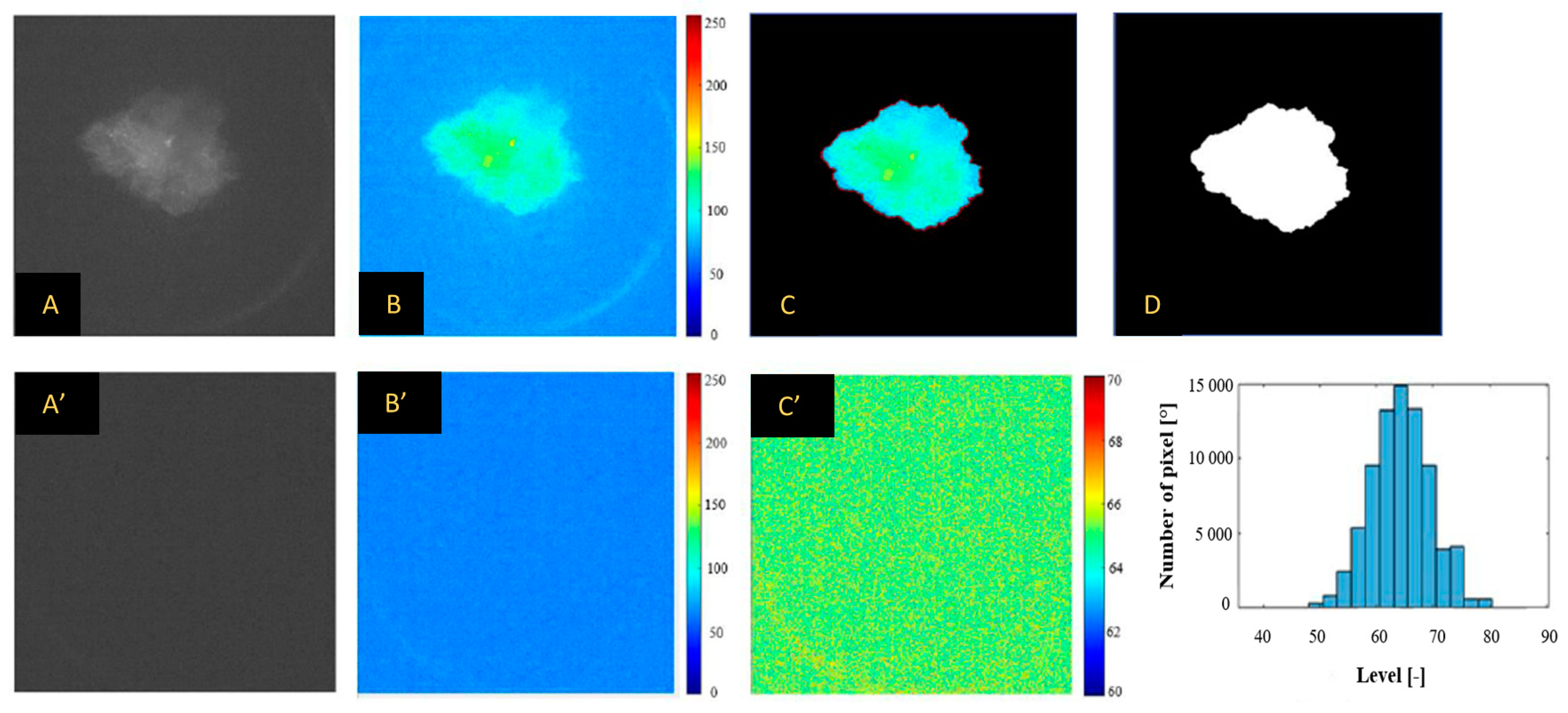
Figure 13 reports the early flame spatial repeatability when Req = 9 mm. The image is obtained by averaging the luminosity levels of the 63 consecutive values, i.e., by means of the flame probability presence when the mean equivalent flame radius is equal to 9 mm [
21]. The autoencoder effectively eliminates noise, evidenced by the near absence of gradients beyond the flame front boundary and reduced internal gradients. This precision is notable in the high-probability flame zone, which is distinctly clearer if compared to the BR approach. This underscores two crucial points, i.e., AE aligns with the evaluation of CoV
IMEP from the indicated analysis, where a larger flame area corresponds to greater stability, consistent with the λ = 1.0 scenario, and, moreover, it demonstrates a stronger ability to detect the initial flame development if compared to the BR method. In summary, the autoencoder achieves superior precision in flame front segmentation, aligning with the indicated analysis’s stability assessment and outperforming the BR method in early flame evolution detection.
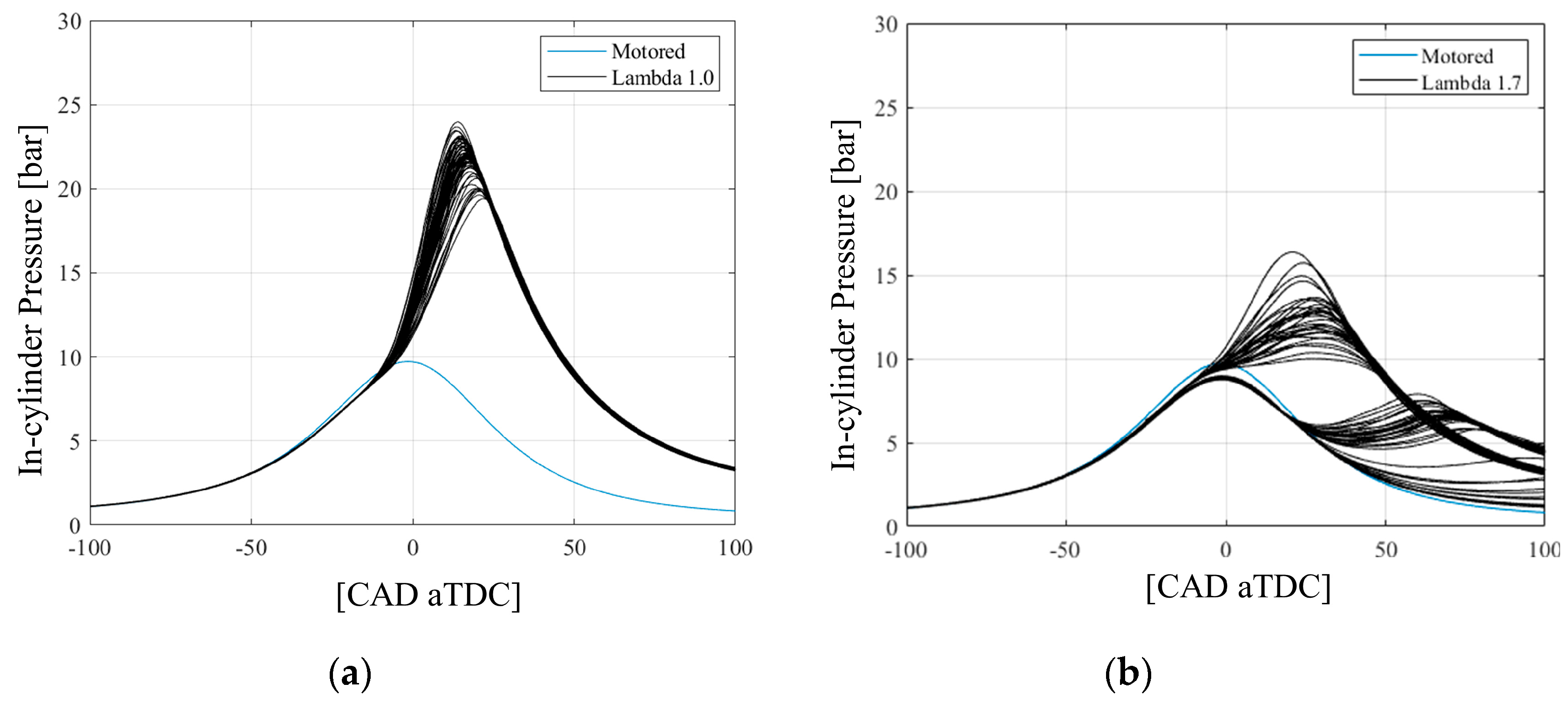
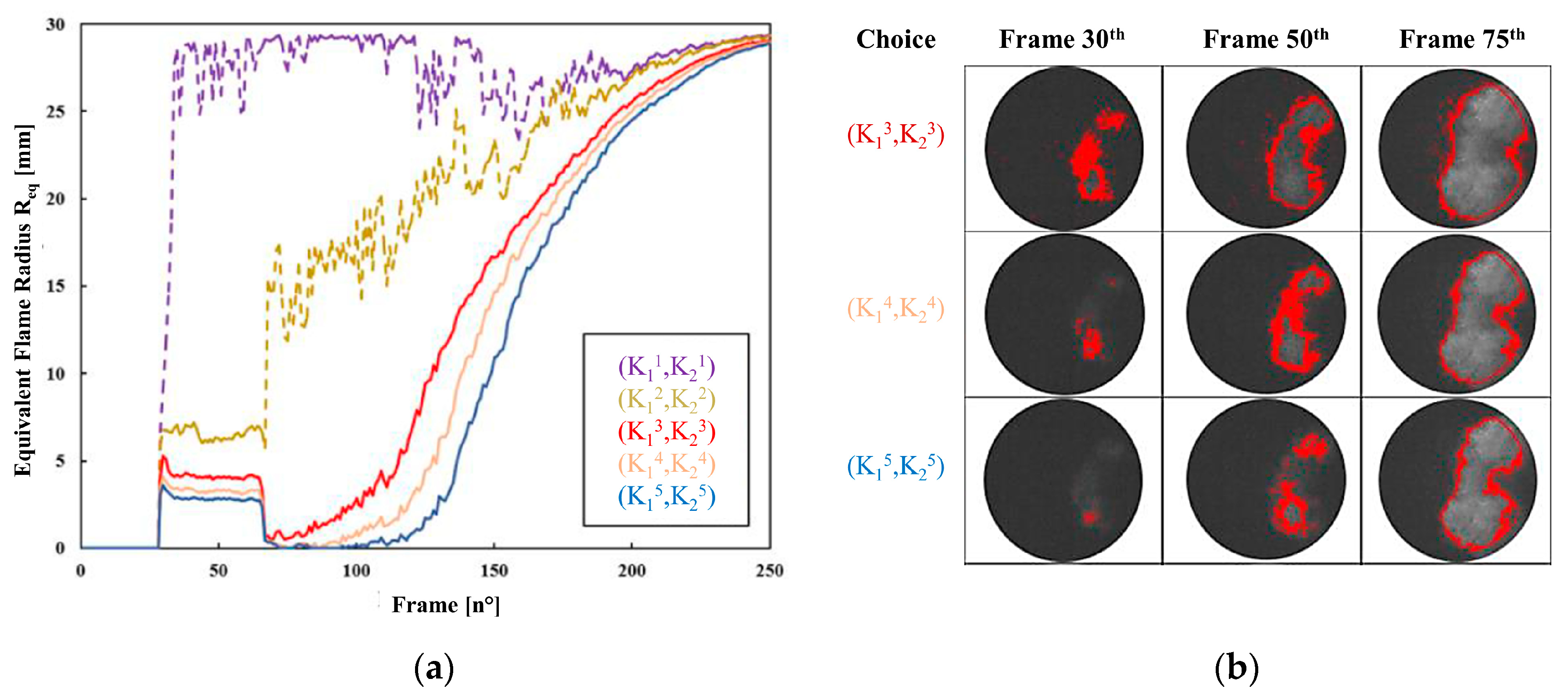
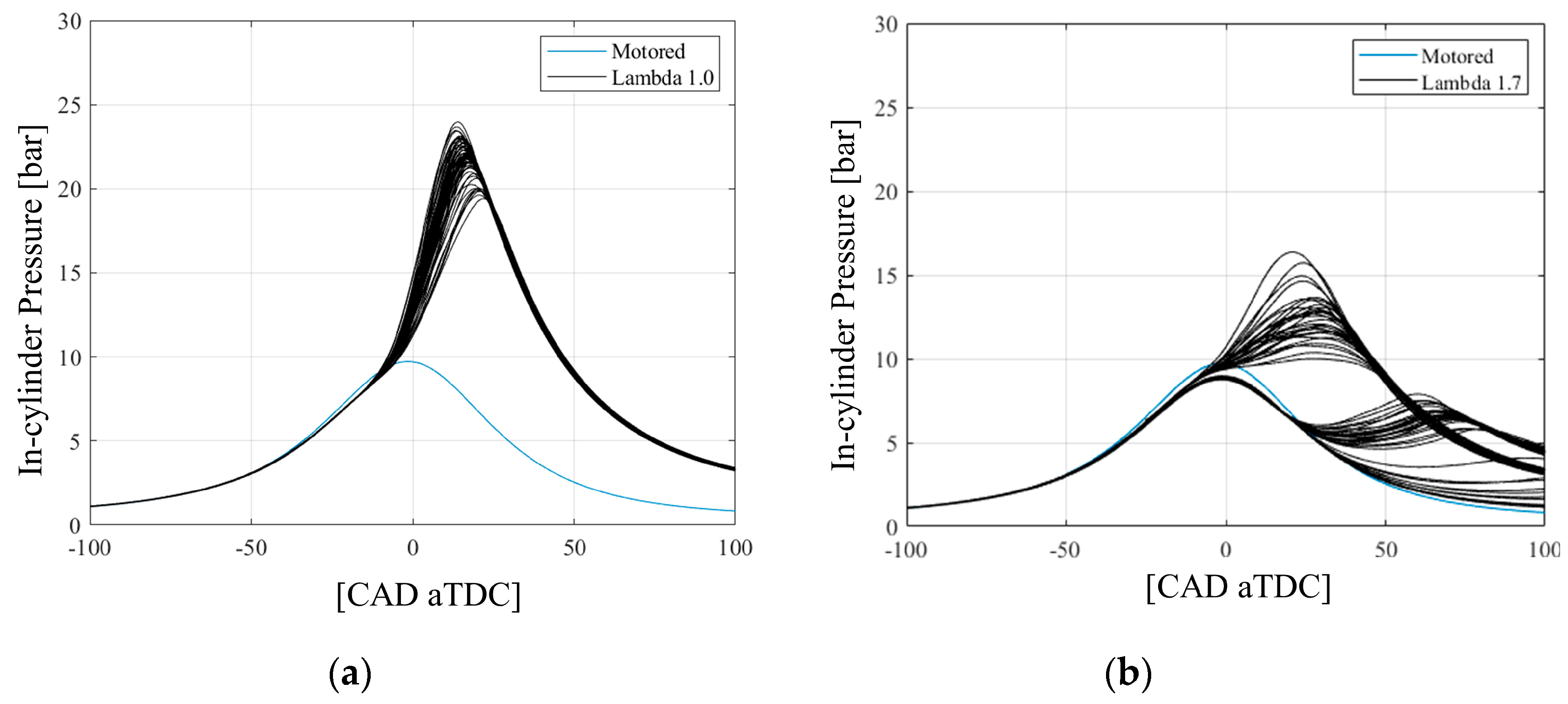
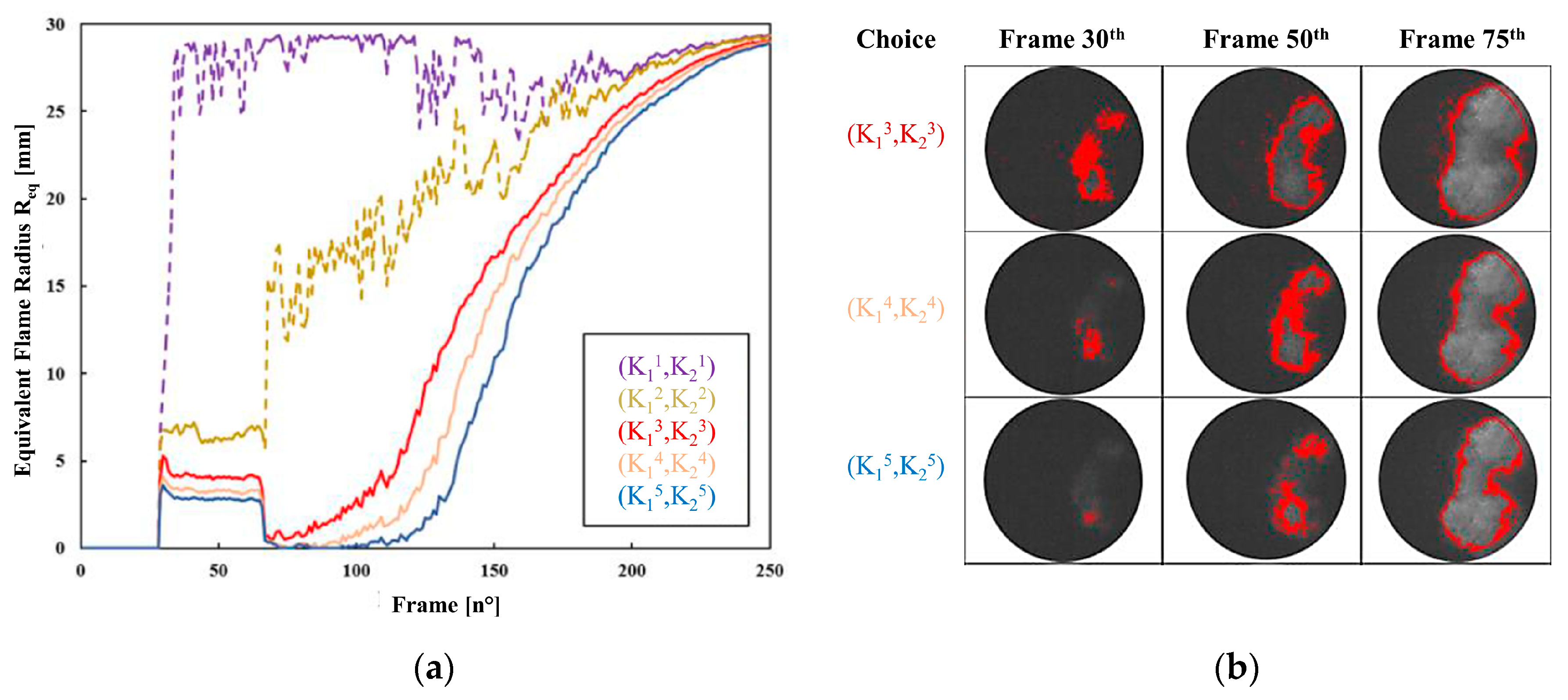
By examining
Figure 2b, three distinct behaviors can be identified summarily. The first relates to the curve exhibiting the highest-pressure level, the second is associated with combustion featuring delayed ignitions, and the third set of curves highlights abnormal combustion occurrences such as misfires. Following an evaluation of the proposed ANN structure in this study at a specific setting (λ = 1.0), a combustion event was selected for each of the abovementioned groups to gauge the autoencoder’s performance against BR under critical conditions (λ = 1.7). As previously demonstrated at λ = 1.0 in
Figure 1, similar assessments have been conducted, and the corresponding outcomes are presented in
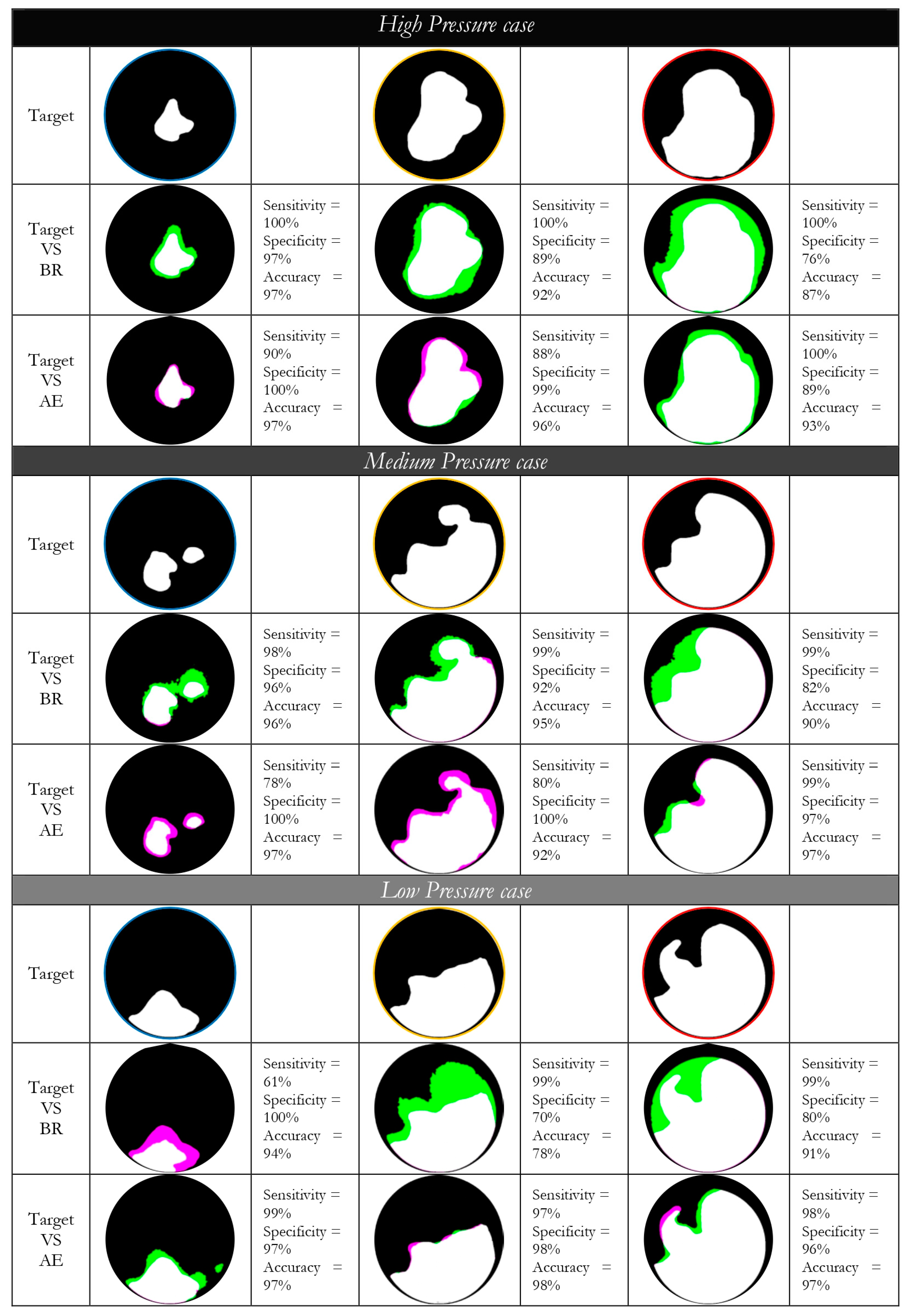
Figure 14.
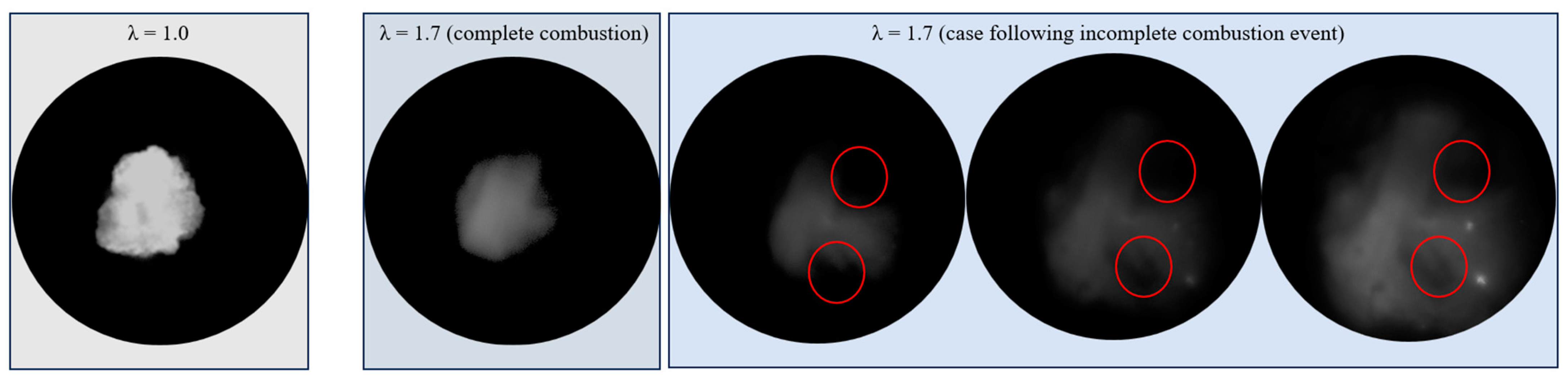
Starting with the ‘High Pressure’ combustion events, in Frame 1, both methods exhibit promising results. BR achieves a perfect sensitivity of 100%, indicating its ability to correctly identify all positive cases. However, its specificity is at 97%, suggesting the possibility of some false positives. The overall accuracy stands at 97%. On the other hand, AE maintains a sensitivity of 90%, with no false positives (specificity of 100%). Despite sacrificing a small part of sensitivity, it achieves a higher specificity, and accuracy remains at 97%. Moving to Frame 2, BR sustains a high sensitivity of 100%, but its specificity decreases to 89%, implying a higher likelihood of false positives. The accuracy in this frame is 92%. AE exhibits a sensitivity of 88%, a slight reduction compared to BR. However, its specificity significantly improves to 99%, indicating greater precision in negative cases. The accuracy is 96%. In Frame 3, BR maintains a sensitivity of 100%, but both specificity and accuracy decrease to 76% and 87%, respectively. AE sustains a sensitivity of 100%, and its specificity is at 89%, with an accuracy of 93%. Once again, AE maintains higher specificity compared to BR.
Moving on to the scenario of ‘Medium Pressure’, in Frame 1, BR demonstrates a sensitivity of 98%, meaning it can accurately identify 98% of positive cases. The specificity is at 96%, suggesting a relatively low rate of false positives, and the overall accuracy is 96%. In comparison, AE exhibits a sensitivity of 78%, indicating a lower ability to correctly identify positive cases. However, it compensates with a perfect specificity of 100%, resulting in an accuracy of 97%. Moving to Frame 2, BR achieves a sensitivity of 99% with a specificity of 92% and an accuracy of 95%. The high sensitivity suggests the effective identification of positive cases, but the lower specificity implies a higher likelihood of false positives. AE, on the other hand, maintains a sensitivity of 80% and a perfect specificity of 100%, resulting in an accuracy of 92%. In Frame 3, BR maintains a high sensitivity of 99%, but both specificity and accuracy decrease to 82% and 90%, respectively. In contrast, AE sustains a sensitivity of 99% with a specificity of 97%, leading to an accuracy of 97%.
Lastly, addressing the circumstances involving ‘Low Pressure’, in Frame 1, BR displays a sensitivity of 61%, indicating its ability to correctly identify 61% of positive cases. The specificity is at 100%, implying an absence of false positives, and the overall accuracy is 94%. On the other hand, AE achieves a higher sensitivity of 99%, coupled with a specificity of 97%, resulting in an accuracy of 97%. In Frame 2, BR attains a sensitivity of 99%, suggesting the effective identification of positive cases. However, the specificity is lower at 70%, leading to a higher likelihood of false positives, and the accuracy is 78%. AE, in contrast, maintains a sensitivity of 97% and a higher specificity of 98%, resulting in an accuracy of 98%. Moving to Frame 3, BR maintains a high sensitivity of 99%, but both specificity and accuracy decrease to 80% and 91%, respectively. AE sustains a sensitivity of 98%, a specificity of 96%, and an accuracy of 97%. The comparisons between the equivalent flame radius confirm the superiority of AE in comparison to BR in reproducing the Req target.
In summary, AE tends to demonstrate a more balanced and consistent performance across various scenarios, especially excelling in specificity and precision. BR, while achieving high sensitivity, may encounter challenges in maintaining specificity, impacting its ability to avoid false positives. Considering these outcomes, it is correct to conclude that there is a noticeable decrease in BR’s performance and an increase in AE’s performance across the frames. This gradual difference in performance suggests that AE is more suitable for lean combustions, showing increased and consistent performance, especially in anomalous combustion scenarios, making it superior to BR. In summary, the observations align with the idea that AE is better suited for the scenarios presented, offering improved performance over BR, especially in terms of specificity and the ability to handle ultra-lean and anomalous combustions.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}