
Research on Sub-Synchronous-Oscillation Energy Analysis and Traceability Method Based on Refined Energy


Abstract
1. Introduction
2. Construction and Analysis of Fine Energy Function of D-PMSG Grid-Connected System
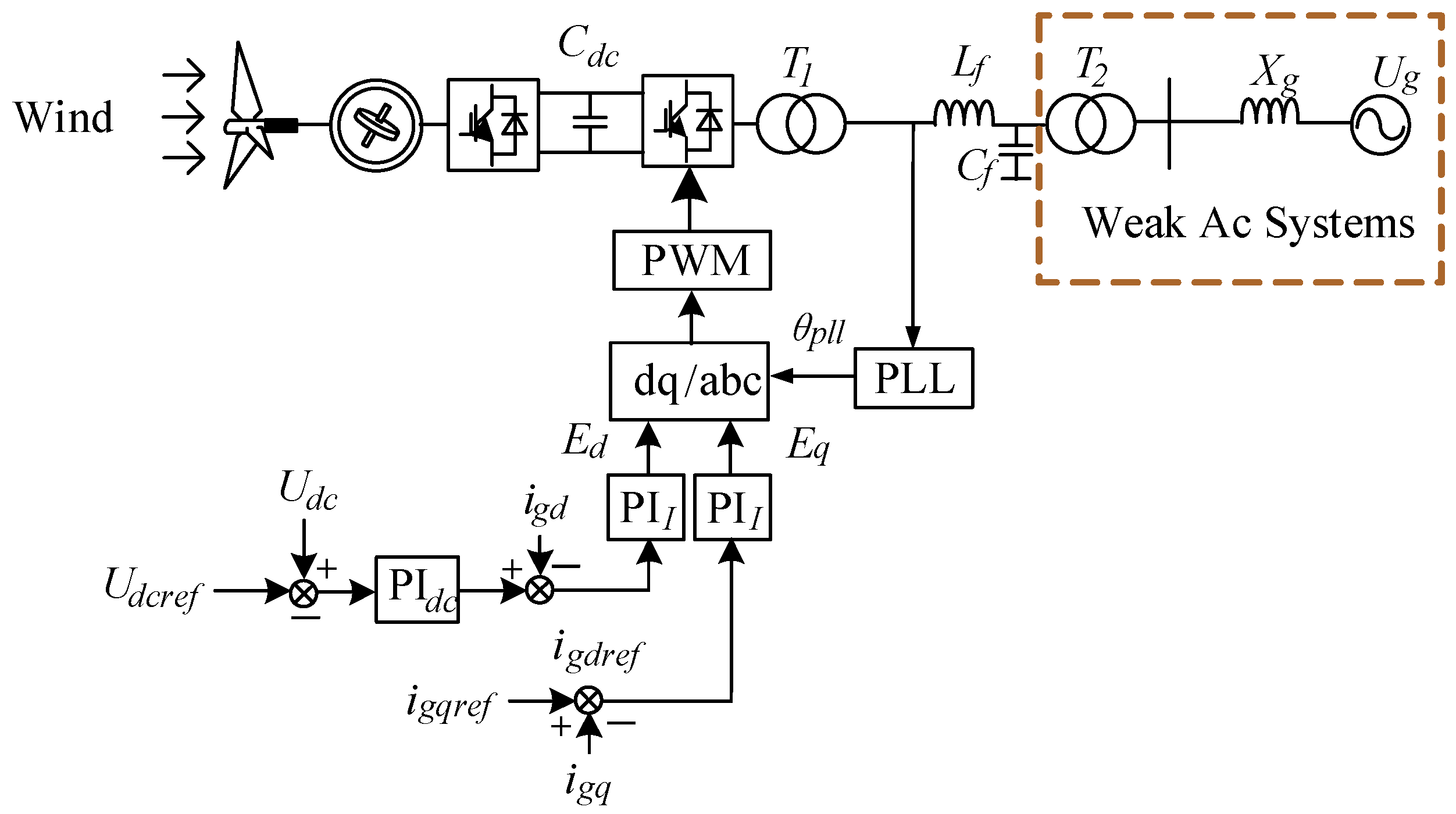
2.1. System Topology Structure
2.2. Small Signal Model of Each Control Link
- (1)
- Small signal model of the current loop
- (2)
- Small signal model of DC voltage loop
- (3)
- The linearization model of PLL is as follows:
2.3. Refined Energy Function Construction of D-PMSG
3. Sensitivity Analysis
4. Results Simulation Analysis
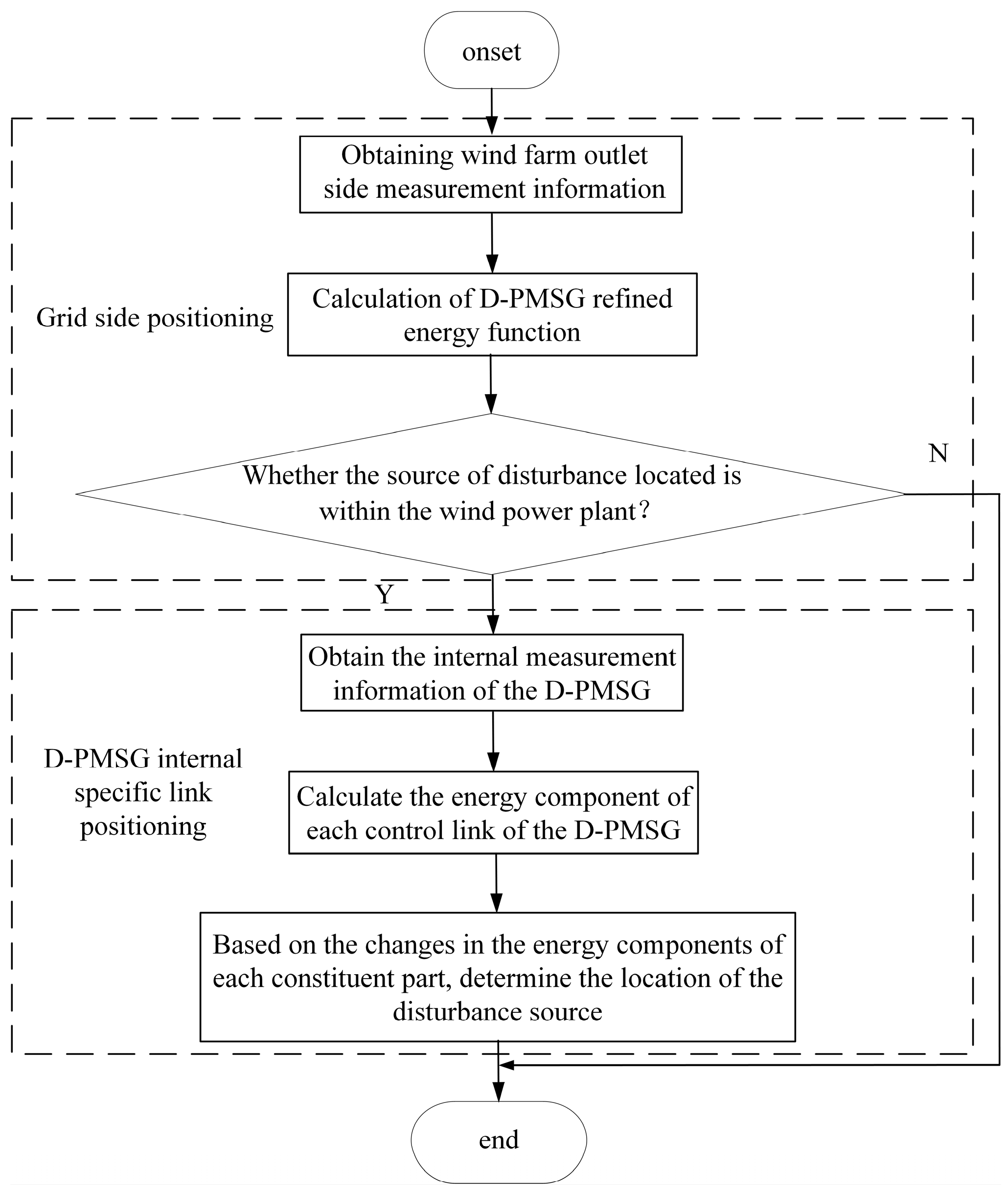
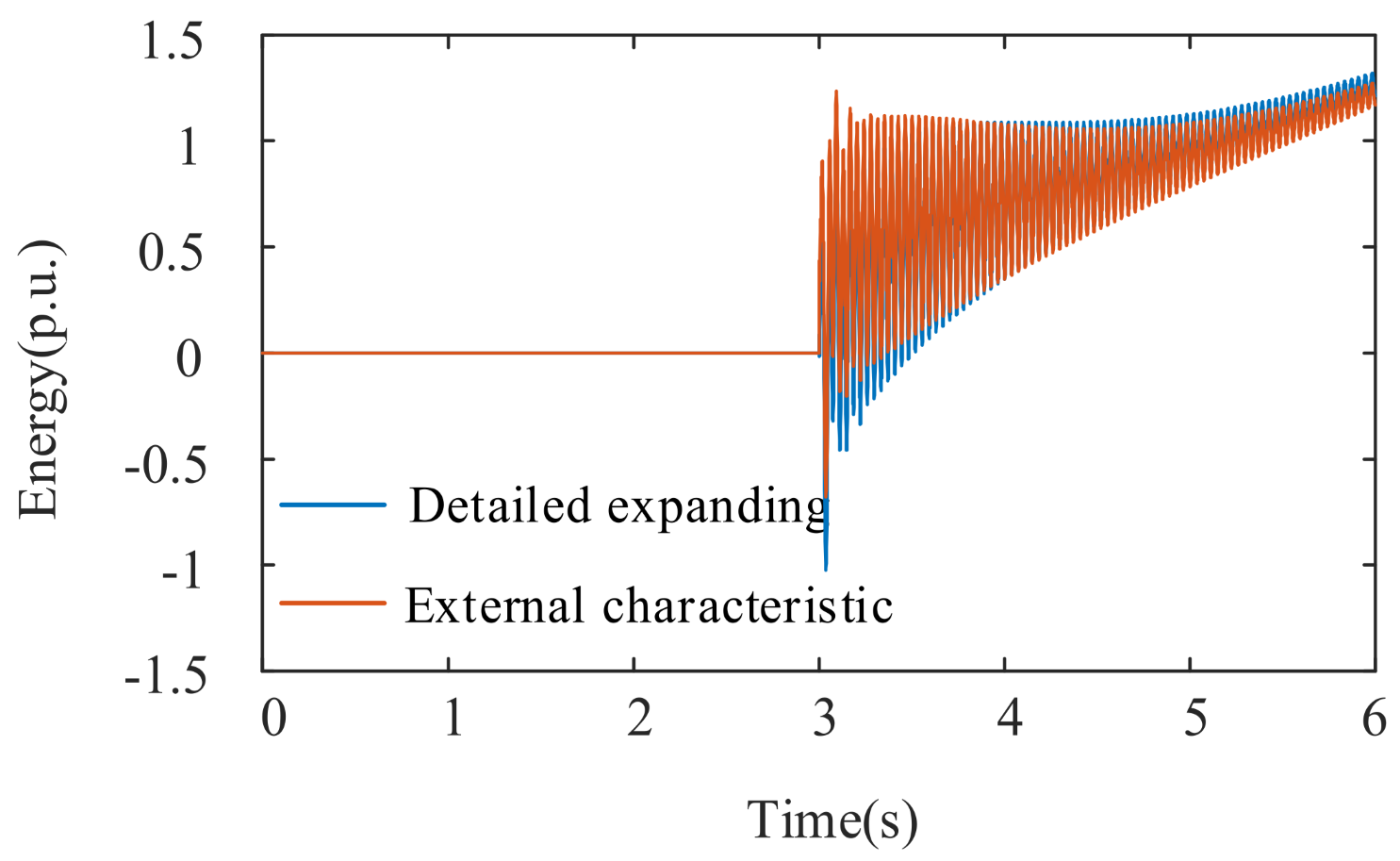
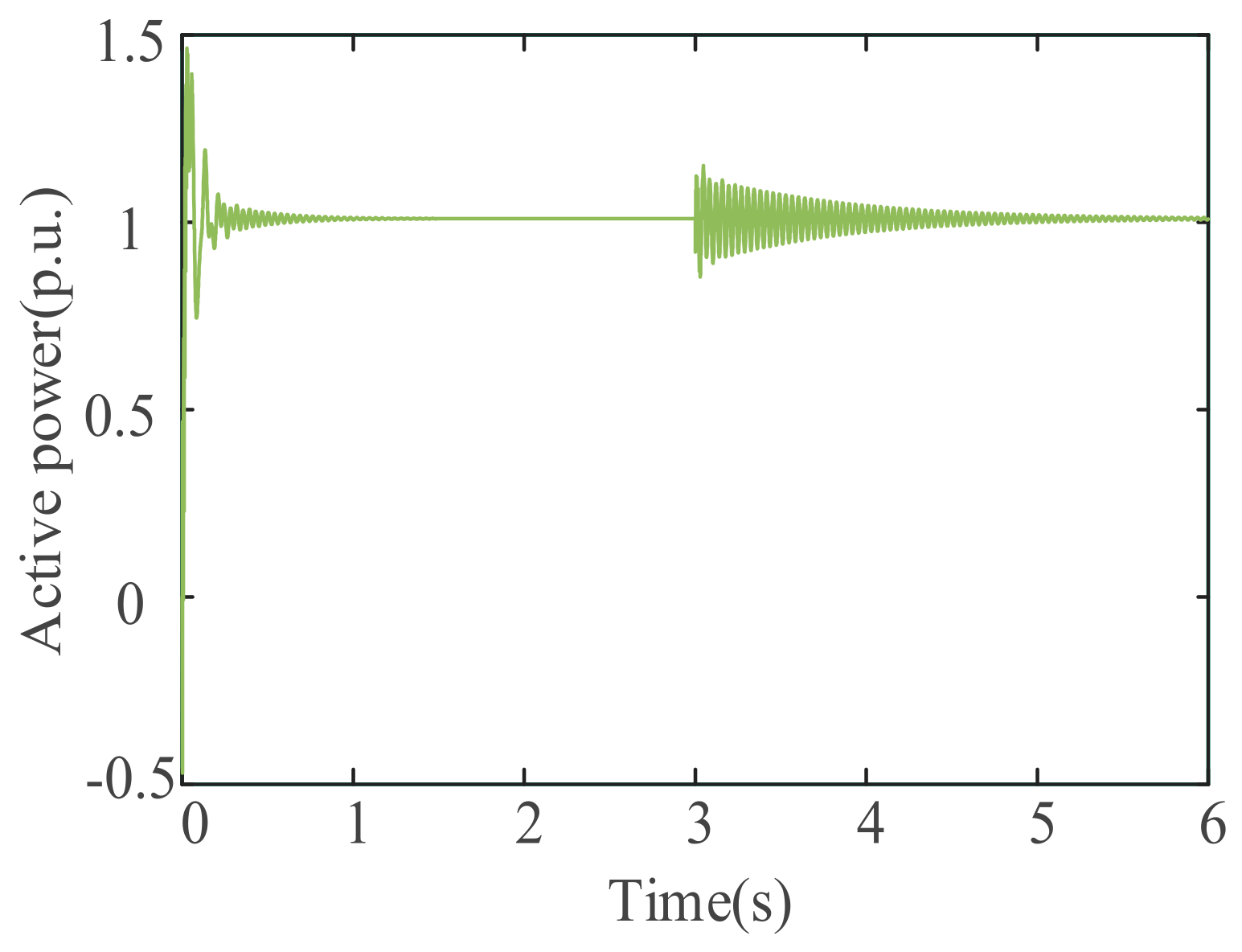
4.1. Validation of the Technique
4.2. Example Analysis
- (1)
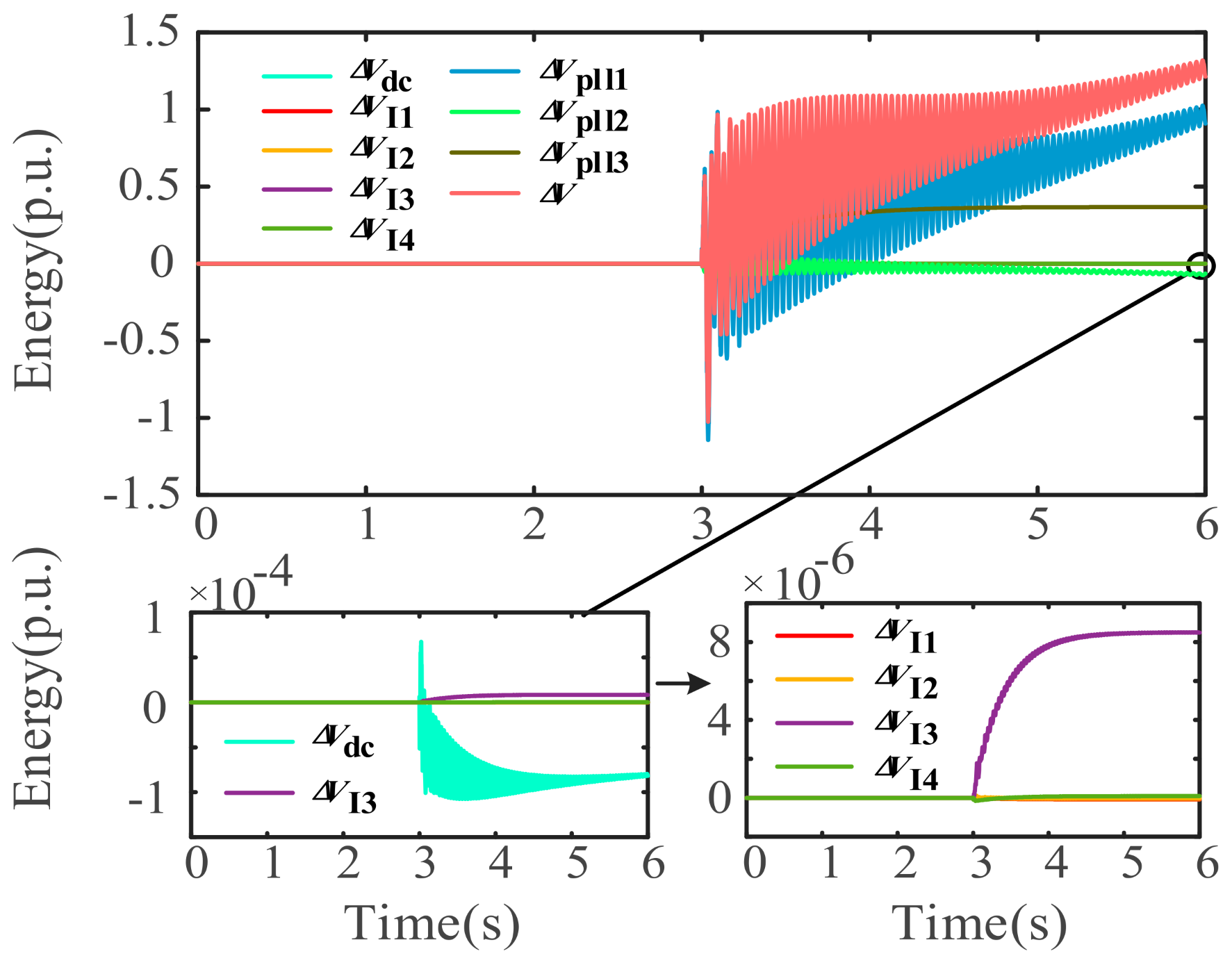
- Weak damping-type SSO
- (2)
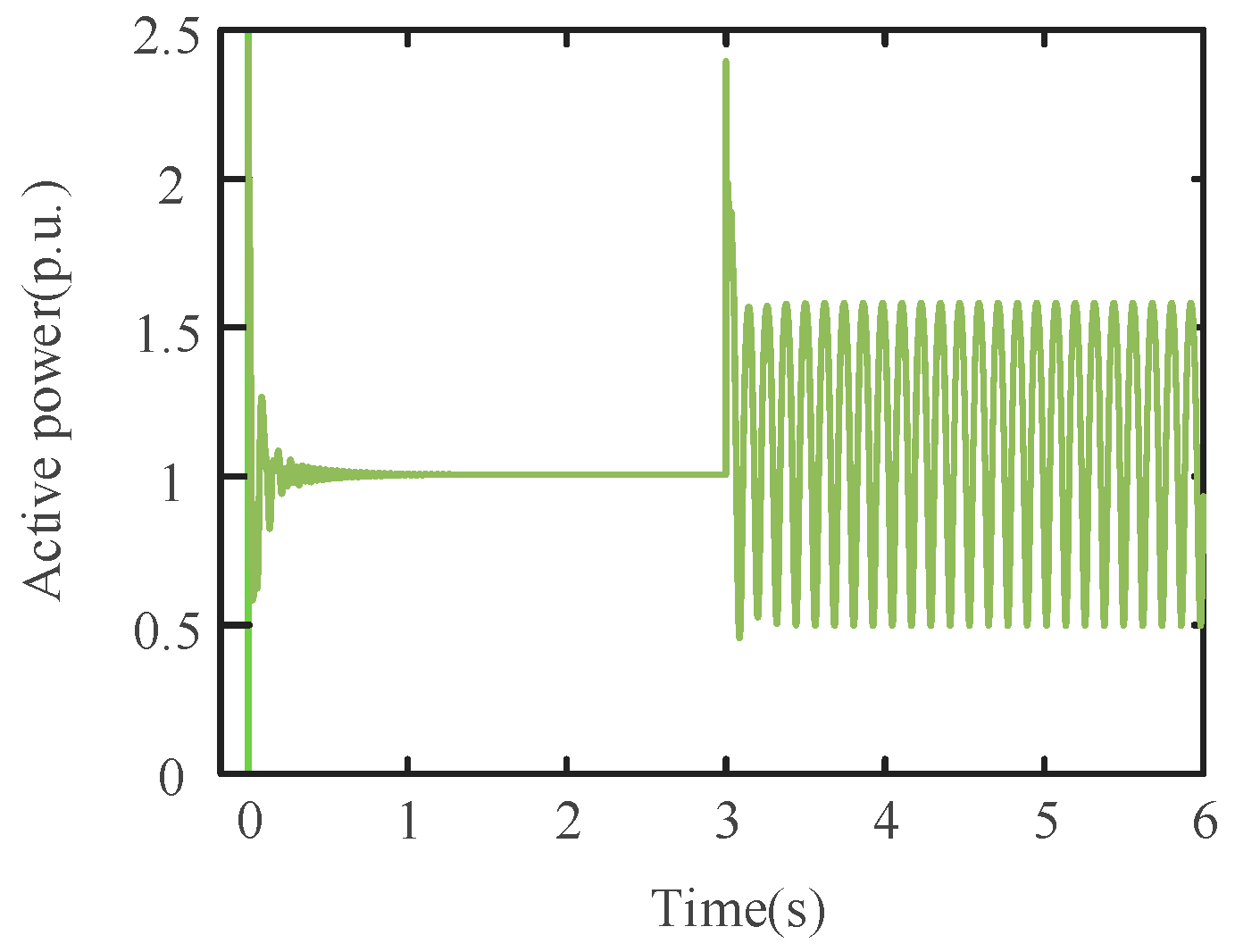
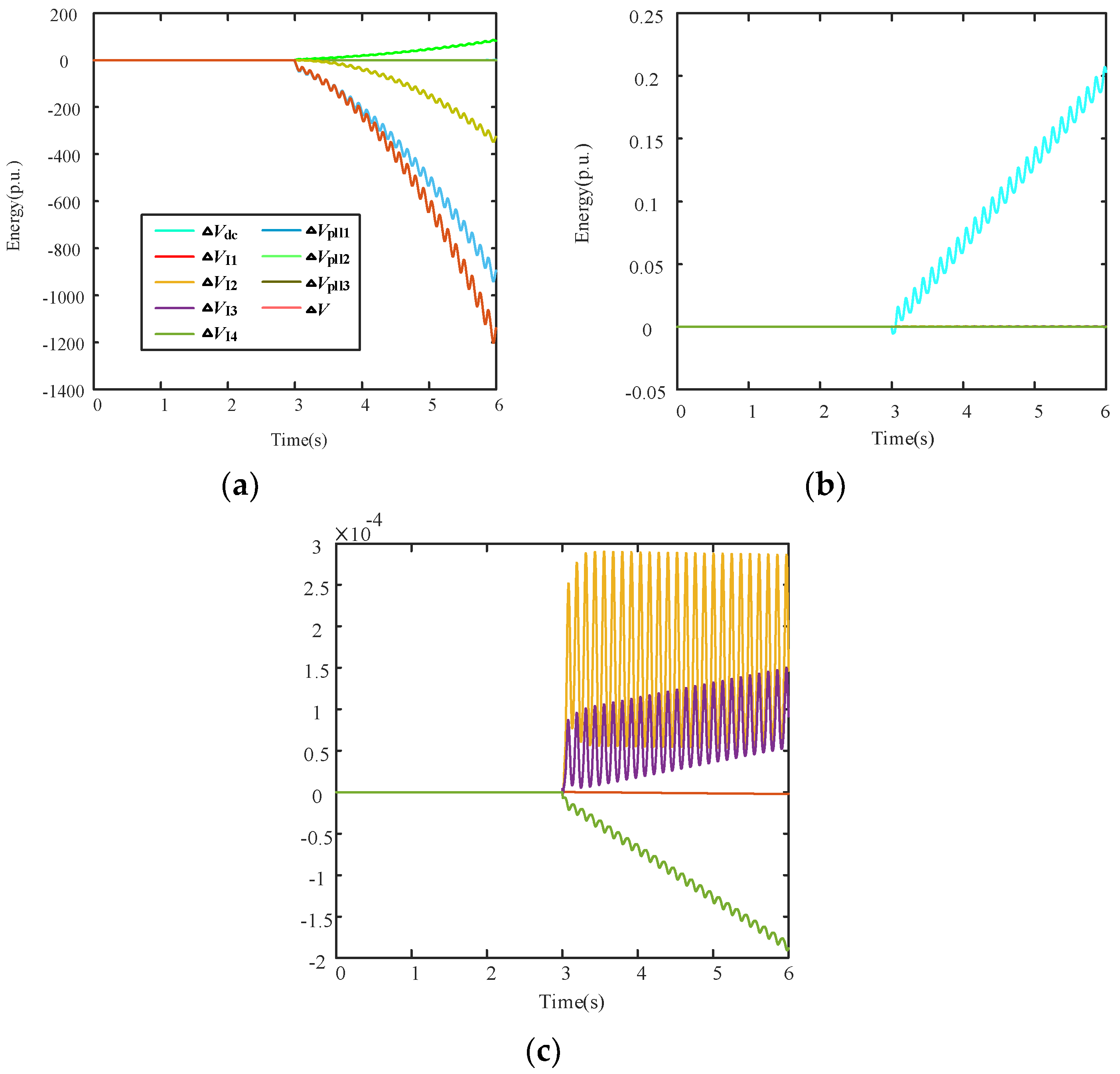
- Forced-oscillation-Type SSO
5. Conclusions
- (1)
- The development of an improved D-PMSG energy function. A layered analysis is performed based on the small-signal models of different control loops in D-PMSG, and transient energy methods are used to meticulously analyze the energy structure. As a result, a refined-energy function that captures the dynamic properties of D-PMSG and accounts for its internal control loops is developed. In the example study employed in this research, it is observed through simulations in SIMULINK that the majority of the energy of D-PMSG is concentrated in the phase-locked loop;
- (2)
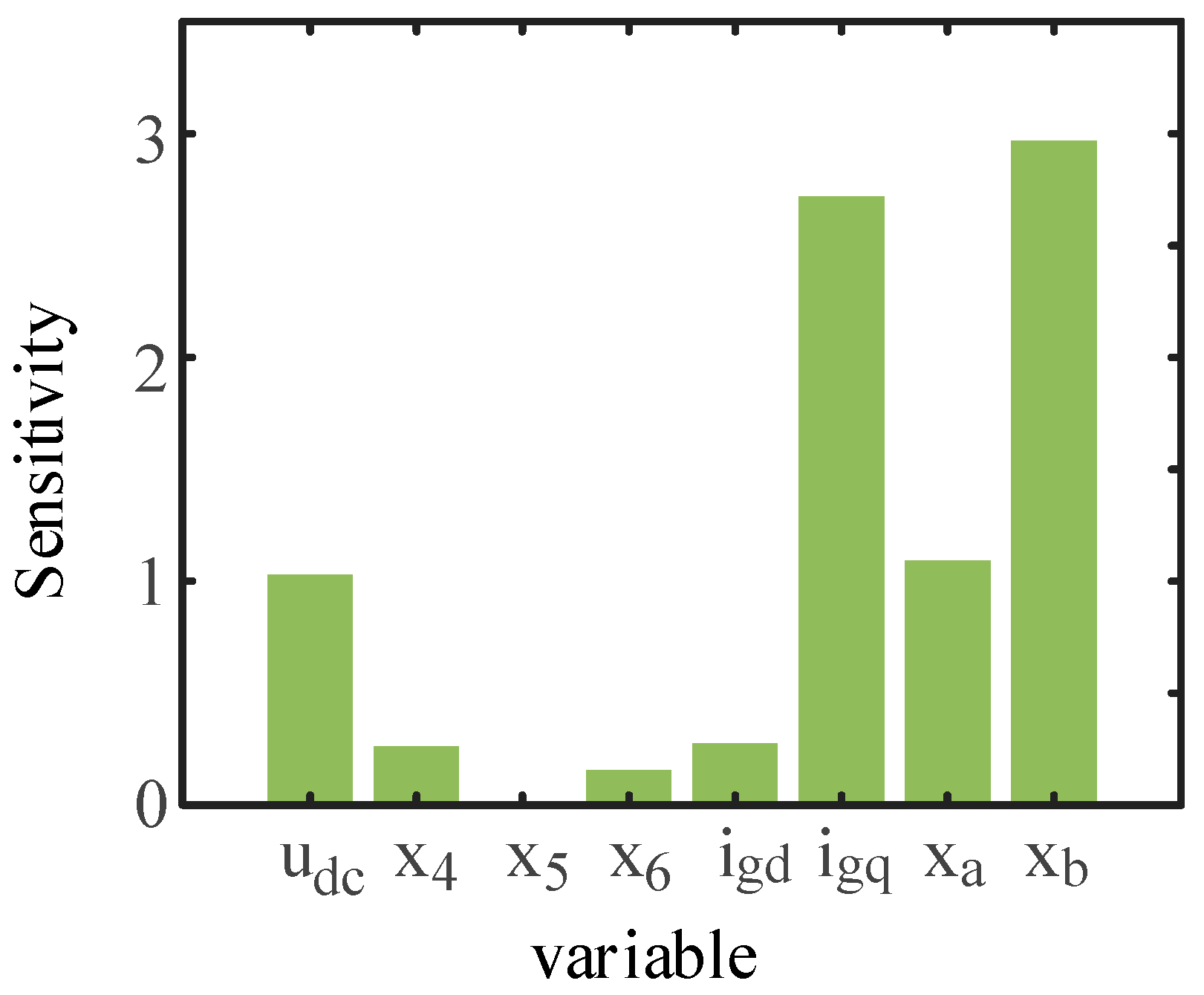
- The identification of internal state variables in D-PMSG that exhibit high sensitivity to energy. By improving upon the traditional perturbation method, a sensitivity analysis is conducted on various state variables of D-PMSG with respect to the refined-energy function constructed in this paper. The analysis reveals that, in the case study used here, the state variables xa, xb, corresponding to the D-PMSG phase-locked loop control and the q-axis component igq related to phase-locked loop control, are primarily involved in SSO phenomena, which aligns with the results obtained through the disturbance-source-localization method employed in this paper;
- (3)
- The validation of the suggested approach within the framework of forced-oscillation SSO. A forced-oscillation SSO scenario is created in SIMULINK simulations by putting the disturbance source on the grid side. The efficacy of the suggested approach is validated when the disturbance source is found not to originate from within D-PMSG using the disturbance-source-localization method employed in this work.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, D.; Sun, Y. Generalized Impedance-Based Stability Analysis for System- Level Small-Signal Stability Assessment of Large-Scale Power Electronics-Dominated Power Systems. In Proceedings of the 2021 IEEE 12th Energy Conversion Congress & Exposition—Asia (ECCE-Asia), Virtual, 24 May 2021; IEEE: Singapore; pp. 2069–2074. [Google Scholar]
- Xiao, X.; Luo, C.; Liao, K. Review of the Research on Subsynchronous Oscillation Issues in Electric Power System with Renewable Energy Sources. Diangong Jishu Xuebao/Trans. China Electrotech. Soc. 2017, 32, 85–97. [Google Scholar]
- Xie, X.; Zhang, X.; Liu, H.; Liu, H.; Li, Y.; Zhang, C. Characteristic Analysis of Subsynchronous Resonance in Practical Wind Farms Connected to Series-Compensated Transmissions. IEEE Trans. Energy Convers. 2017, 32, 1117–1126. [Google Scholar] [CrossRef]
- Shao, B.; Zhao, Z.; Xiao, Q.; Yang, Z.; Meng, X. Weak Robustness Analysis of Close Subsynchronous Oscillation Modes’ Participation Factors in Multiple Direct-Drive Wind Turbines with the VSC-HVDC System. Diangong Jishu Xuebao/Trans. China Electrotech. Soc. 2023, 38, 754–769. [Google Scholar]
- Adams, J.; Carter, C.; Huang, S.-H. ERCOT Experience with Sub-Synchronous Control Interaction and Proposed Remediation. In Proceedings of the PES T&D 2012, Orlando, FL, USA, 7–10 May 2012; IEEE: Orlando, FL, USA; pp. 1–5. [Google Scholar]
- Sun, Z.; Cai, G.; Yang, D.; Liu, C.; Wang, B.; Wang, L. A Method for the Evaluation of Generator Damping During Low-Frequency Oscillations. IEEE Trans. Power Syst. 2019, 34, 109–119. [Google Scholar] [CrossRef]
- Ma, J.; Wang, L.; Shen, Y. Interaction Energy-Based Stability Analysis Method and Application in Grid-Tied Type-4 Wind Turbine Generator. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 5542–5557. [Google Scholar] [CrossRef]
- Chen, X.; Wu, X.; Gu, W.; Fan, L. Research on Energy Analysis and SSO Source Location Method for Power Grids with DFIGs Based on the Sub-Synchronous Modal Energy. Zhongguo Dianji Gongcheng Xuebao/Proc. Chin. Soc. Electr. Eng. 2023, 43, 5863–5876. [Google Scholar]
- Chen, W.; Yu, X.; Han, X.; Jia, Y.; Chang, X.; Guo, X. Analysis of Forced SSOs Excited by Subsynchronous Interharmonics From DPMSG-Based Wind Farms. IEEE Trans. Sustain. Energy 2021, 12, 978–989. [Google Scholar] [CrossRef]
- Xie, X.; Zhan, Y.; Shair, J.; Ka, Z.; Chang, X. Identifying the Source of Subsynchronous Control Interaction via Wide-Area Monitoring of Sub/Super-Synchronous Power Flows. IEEE Trans. Power Deliv. 2020, 35, 2177–2185. [Google Scholar] [CrossRef]
- Gao, B.; Wang, Y.; Xu, W.; Yang, G. Identifying and Ranking Sources of SSR Based on the Concept of Subsynchronous Power. IEEE Trans. Power Deliv. 2020, 35, 258–268. [Google Scholar] [CrossRef]
- Chen, L.; Min, Y.; Hu, W. Low Frequency Oscillation Analysis and Oscillation Source Location Based on Oscillation Energy. Part One: Mathematical Foundation and Energy Flow Computation. Dianli Xitong Zidonghua/Autom. Electr. Power Syst. 2012, 36, 22–27+86. [Google Scholar]
- Maslennikov, S.; Wang, B.; Litvinov, E. Dissipating Energy Flow Method for Locating the Source of Sustained Oscillations. Int. J. Electr. Power Energy Syst. 2017, 88, 55–62. [Google Scholar] [CrossRef]
- Maslennikov, S.; Litvinov, E. ISO New England Experience in Locating the Source of Oscillations Online. IEEE Trans. Power Syst. 2021, 36, 495–503. [Google Scholar] [CrossRef]
- Liu, C.; Diao, S.; Cai, G.; Zhang, Y.; Yu, F. Construction of Detailed Energy Function of Double-fed Induction Generator for Small Signal Stability Analysis of Power Systems with a High Penetration of Double-fed Induction Generator. IET Gener. Trans. Dist. 2022, 16, 4761–4774. [Google Scholar] [CrossRef]
- Wu, M.; Xie, L.; Cheng, L.; Sun, R. A Study on The Impact of Wind Farm Spatial Distribution on Power System Sub-Synchronous Oscillations. IEEE Trans. Power Syst. 2016, 31, 2154–2162. [Google Scholar] [CrossRef]
- Perera, U.; Oo, A.M.T.; Zamora, R. Sub Synchronous Oscillations under High Penetration of Renewables—A Review of Existing Monitoring and Damping Methods, Challenges, and Research Prospects. Energies 2022, 15, 8477. [Google Scholar] [CrossRef]
- Yan, X.; Chang, W.; Cui, S.; Rasool, A.; Jia, J.; Sun, Y. Recurrence of Sub-Synchronous Oscillation Accident of Hornsea Wind Farm in UK and Its Suppression Strategy. Energies 2021, 14, 7685. [Google Scholar] [CrossRef]
- Mourabit, Y.E.; Salime, H.; Bossoufi, B.; Motahhir, S.; Derouich, A.; Mobayen, S.; Zhilenkov, A. Enhanced Performance in PMSG-Based Wind Turbine Systems: Experimental Validation of Adaptive Backstepping Control Design. Energies 2023, 16, 7481. [Google Scholar] [CrossRef]
- Ashraf, A.; Saadi, M. The Impact of Phase-Locked Loop (PLL) Architecture on Sub-Synchronous Control Interactions (SSCI) for Direct-Driven Permanent Magnet Synchronous Generator (PMSG)-Based Type 4 Wind Farms. World Electr. Veh. J. 2023, 14, 206. [Google Scholar] [CrossRef]
- Chao, W.; Deng, C.; Huang, J.; Dai, L.; Min, Y.; Cheng, Y.; Wang, Y.; Liao, J. A Sub-Synchronous Oscillation Suppression Strategy Based on Active Disturbance Rejection Control for Renewable Energy Integration System via MMC-HVDC. Electronics 2023, 12, 2885. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value | |
|---|---|---|
| System reference value | Line-voltage reference value Vbase | 690 V |
| Frequency reference value fbase | 50 Hz | |
| Power reference value Sbase | 2 MW | |
| Normal grid inductance Lg | 0.63 mH | |
| Weak grid inductance Lg1 | 1.7 mH | |
| Parameters of D-PMSG | DC capacitor Cdc | 0.1 F |
| Filter inductance Lf | 0.1 p.u. | |
| Grid-side d-axis current control parameters kpd, kid | 0.3, 160 | |
| DC voltage control reference value Udcref | 1 p.u. | |
| DC voltage control parameters kpdc, kidc | 3.5, 140 | |
| Phase-locked control parameters kpp, kip | 50, 2000 | |
| Grid-side q-axis current-control parameters kpq, kiq | 0.3, 160 |
| Module | Corresponding State Variables |
|---|---|
| Shafting | Fan speed ωs |
| Direct-drive permanent magnet synchronous generator | Stator d, q axis current ids, iqs |
| Converter | Direct current voltage udc Fixed d-axis current of machine-side converter x1 The fixed speed of the outer ring and inner ring of the machine-side converter x2, x3 The outer ring and inner ring of the grid-side converter are fixed DC voltage x4, x5 Fixed q-axis current of grid-side converter x6 |
| Collecting power lines | The d-axis and q-axis currents at the outlet of the grid-side converter idg, iqg The d-axis and q-axis voltage of the grid-side converter outlet udg, uqg |
| PLL | xa, xb |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Yang, J.; Zhou, S.; Liu, C.; Gao, S.; Cao, Z. Research on Sub-Synchronous-Oscillation Energy Analysis and Traceability Method Based on Refined Energy. Energies 2024, 17, 1683. https://doi.org/10.3390/en17071683
Zhang Z, Yang J, Zhou S, Liu C, Gao S, Cao Z. Research on Sub-Synchronous-Oscillation Energy Analysis and Traceability Method Based on Refined Energy. Energies. 2024; 17(7):1683. https://doi.org/10.3390/en17071683
Chicago/Turabian StyleZhang, Zhixiang, Jingying Yang, Shuyu Zhou, Cheng Liu, Song Gao, and Zhichong Cao. 2024. "Research on Sub-Synchronous-Oscillation Energy Analysis and Traceability Method Based on Refined Energy" Energies 17, no. 7: 1683. https://doi.org/10.3390/en17071683
APA StyleZhang, Z., Yang, J., Zhou, S., Liu, C., Gao, S., & Cao, Z. (2024). Research on Sub-Synchronous-Oscillation Energy Analysis and Traceability Method Based on Refined Energy. Energies, 17(7), 1683. https://doi.org/10.3390/en17071683