
Attractive Ellipsoid Technique for a Decentralized Passivity-Based Voltage Tracker for Islanded DC Microgrids

 , , ,
, , ,  and
and 
Abstract
1. Introduction
- (i)
- Centralized control.
- (ii)
- Decentralized control.
- (iii)
- Distributed control.
1.1. Paper Contribution
- A new design is developed for a decentralized state feedback with PI control.
- Decentralized control is achieved by breaking down the DC global MG system into subsystems. The impact of other subsystems on a single subsystem is considered a disturbance that should be rejected. This is achieved by minimizing the size of the attracting ellipsoid.
- A new sufficient stability condition is derived in terms of bilinear matrix inequality.
- Different testing plug and play operations, line parameter uncertainties, and load variations show the effectiveness of the proposed design.
1.2. Notations and Facts
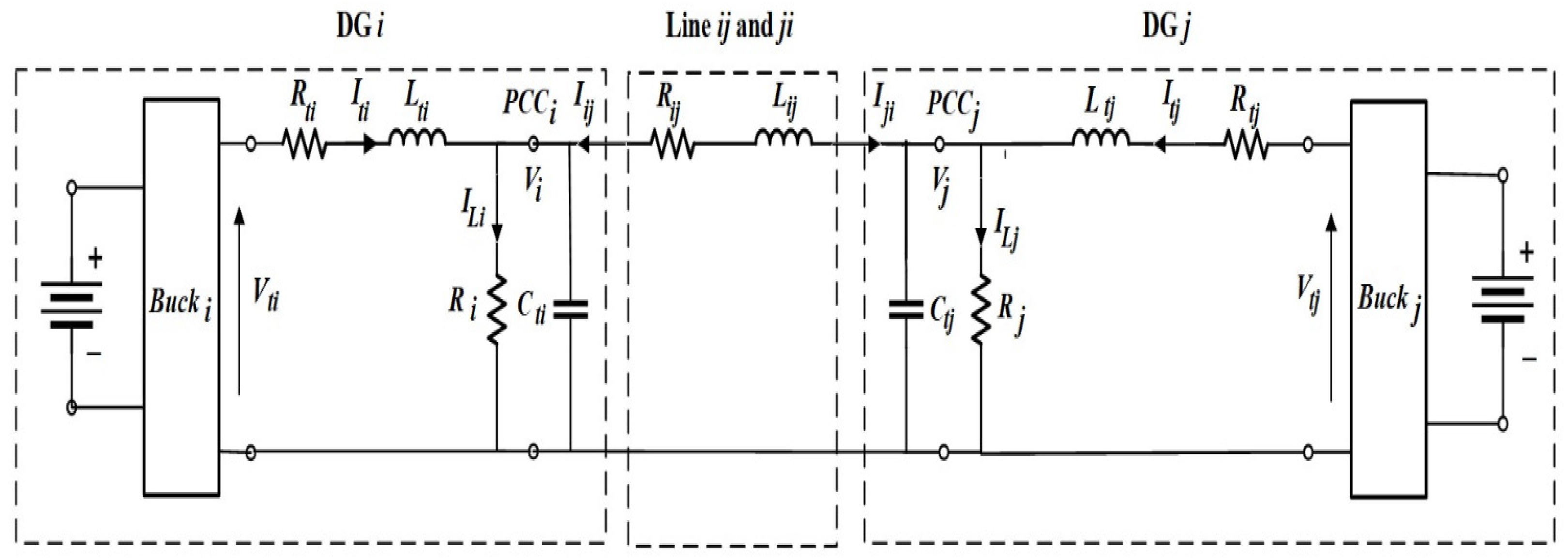
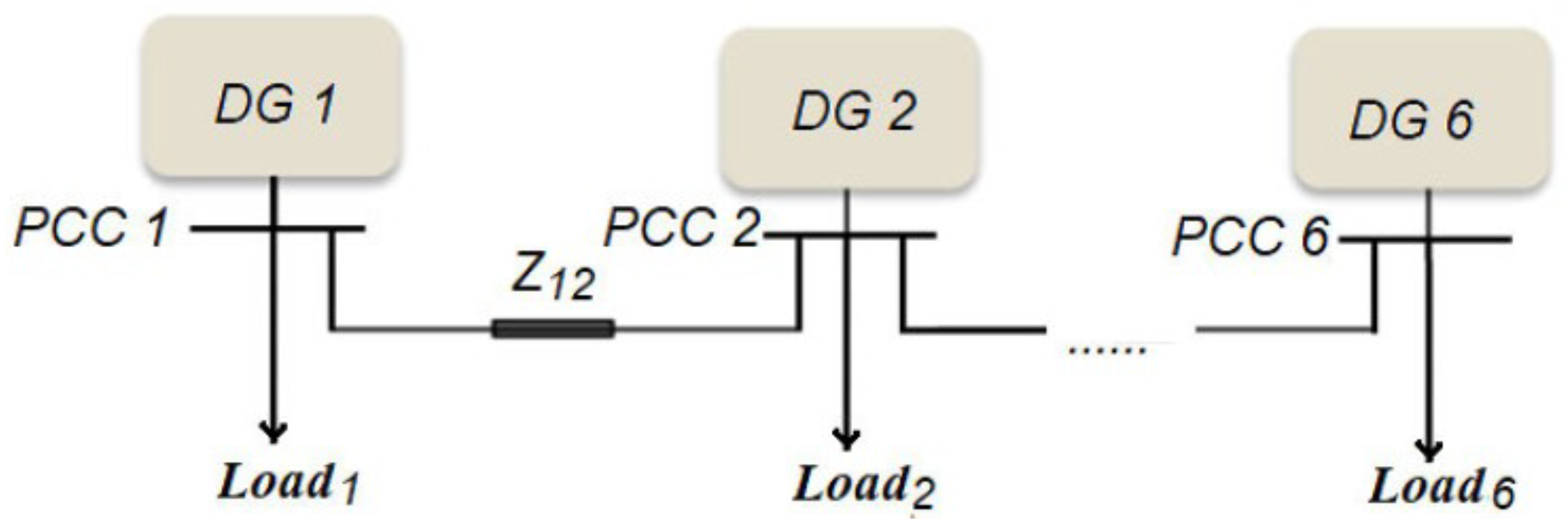
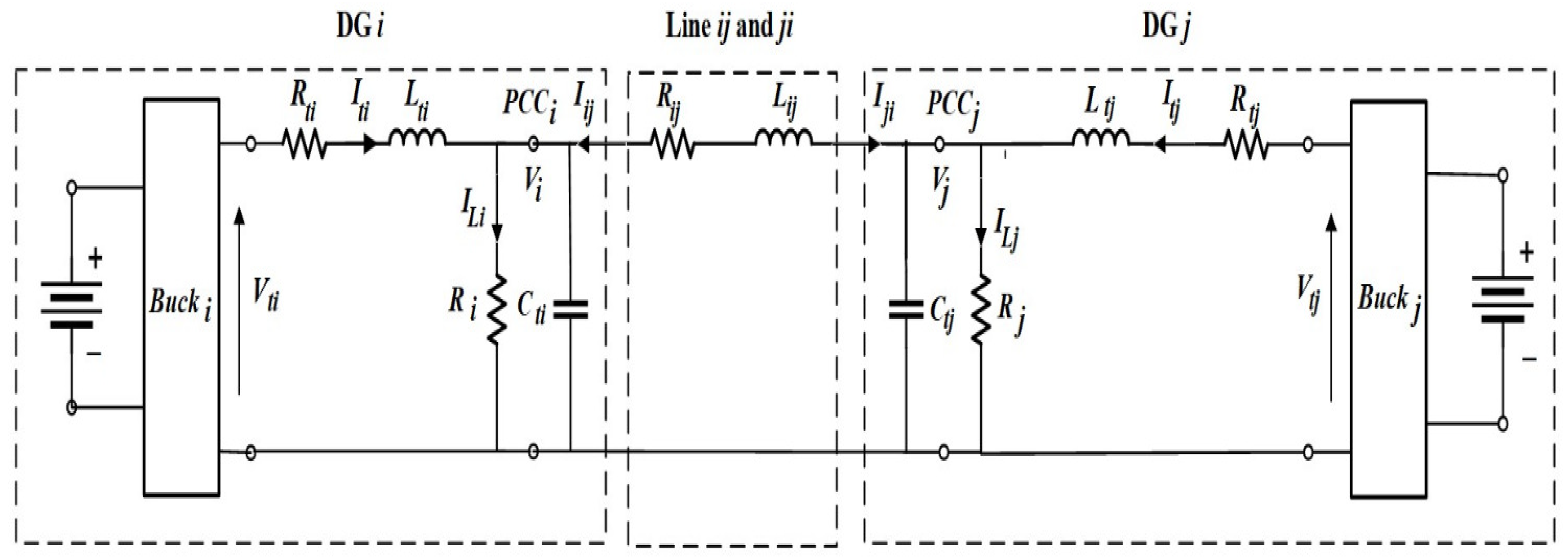
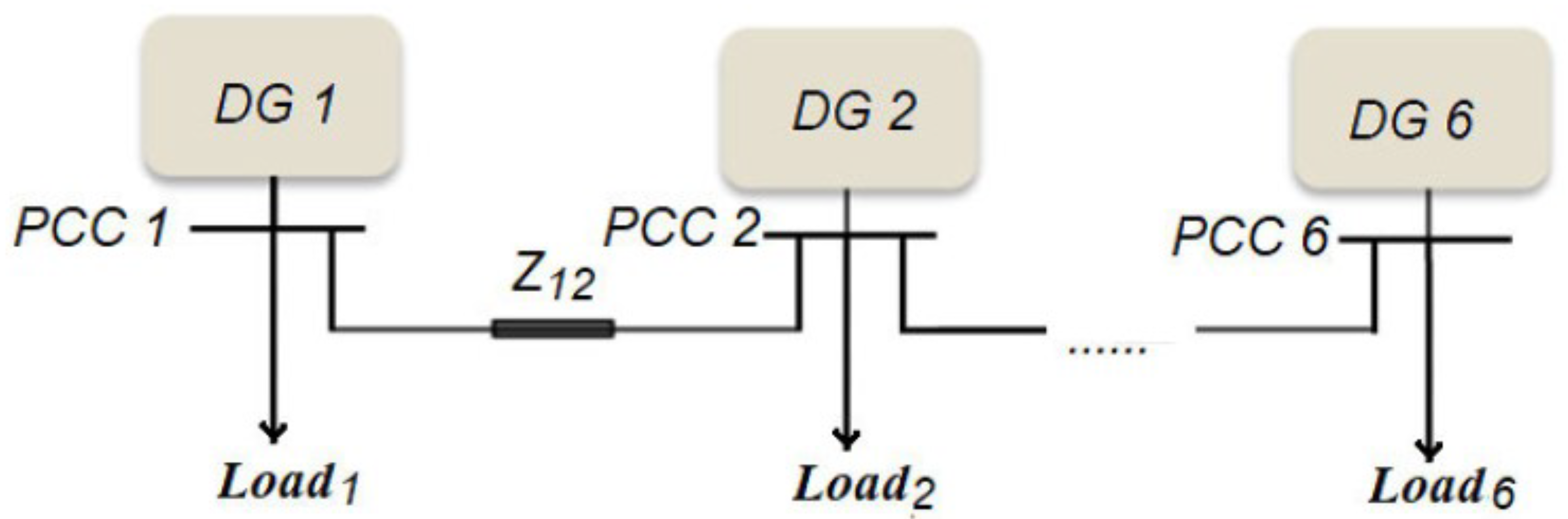
2. System Modeling and Problem Formulation
- The closed-loop system asymptotically follows all reference voltage signals, providing the desired transient and steady-state performance in compliance with IEEE standards [33].
- The controller ensures the overall MG system’s asymptotic stability.
- In MGs, the PnP functionality of DGs is allowed.
- The controller is resilient to changes in MG topology and load variations.
- The voltage controller is decentralized, with a local controller for each DG and no communication link.
- Decentralization provides several advantages in terms of reliability and cost-effectiveness.
3. Passivity-Based Control Using the Attracting Ellipsoid Method
3.1. Solution Methodology
- we consider the time behavior of the extended vector , , which completely describes the principle properties of the closed-loop system such as boundedness of the trajectories within some ellipsoid and the dependence of its ”size” on the feedback gains;
- the next step, which we are realizing, is the minimization of the attractive ellipsoid by selecting the “best” admissible feedback parameters.
3.2. Dissipativity Property
4. Main Result
4.1. Closed-Loop System
Extended Vector
4.2. Ellipsoidal Approach
4.3. Nonlinear Optimization Problem
5. Simulation Validation
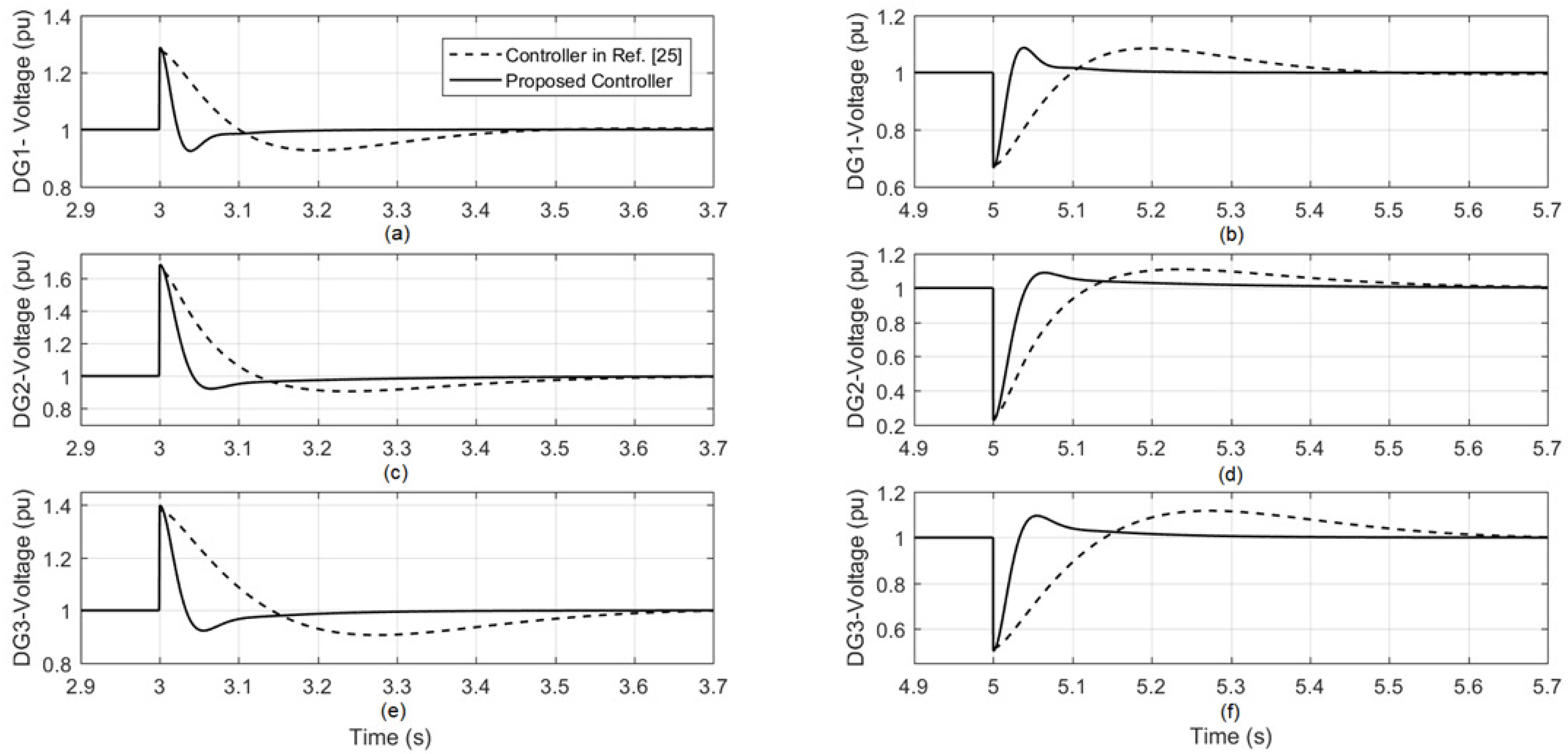
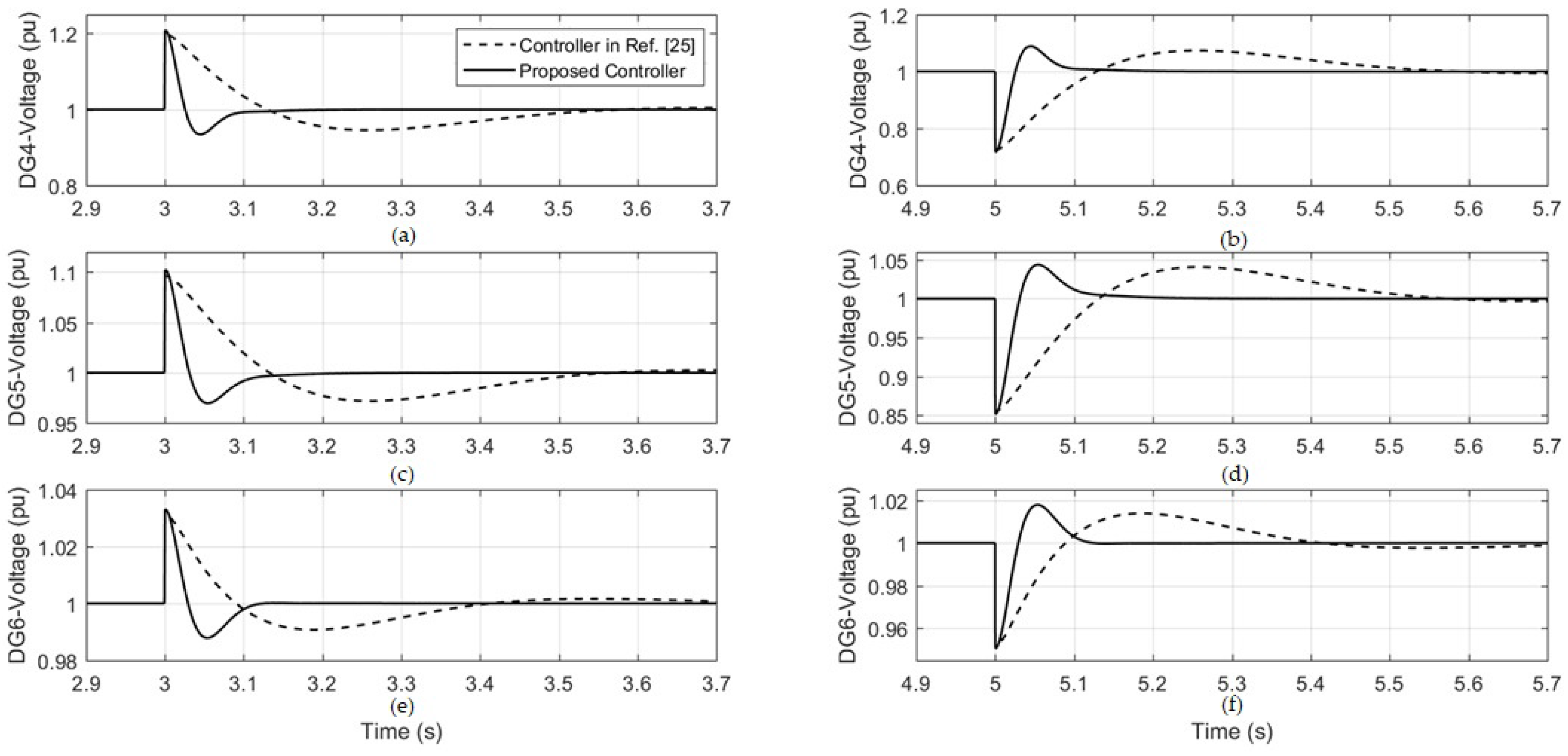
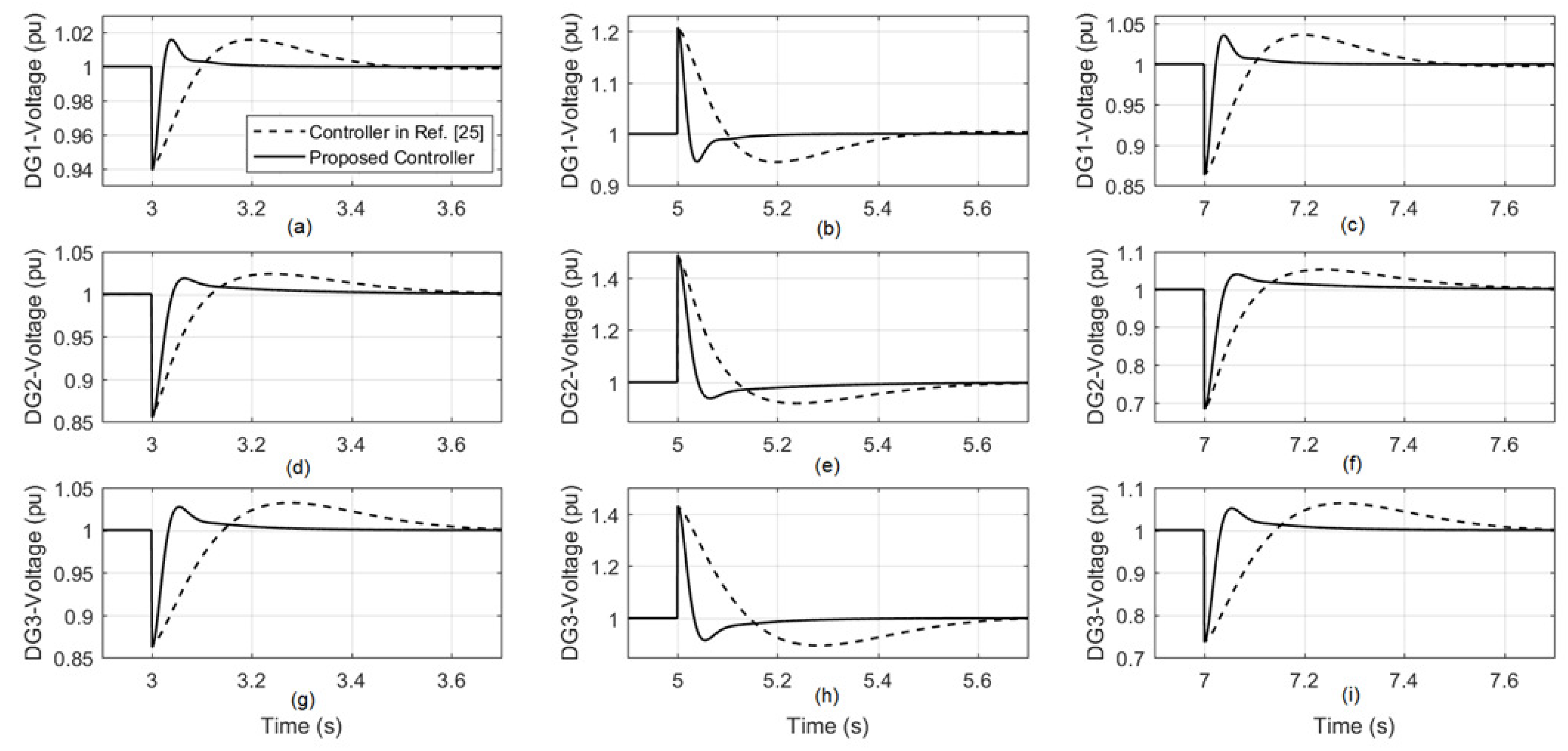
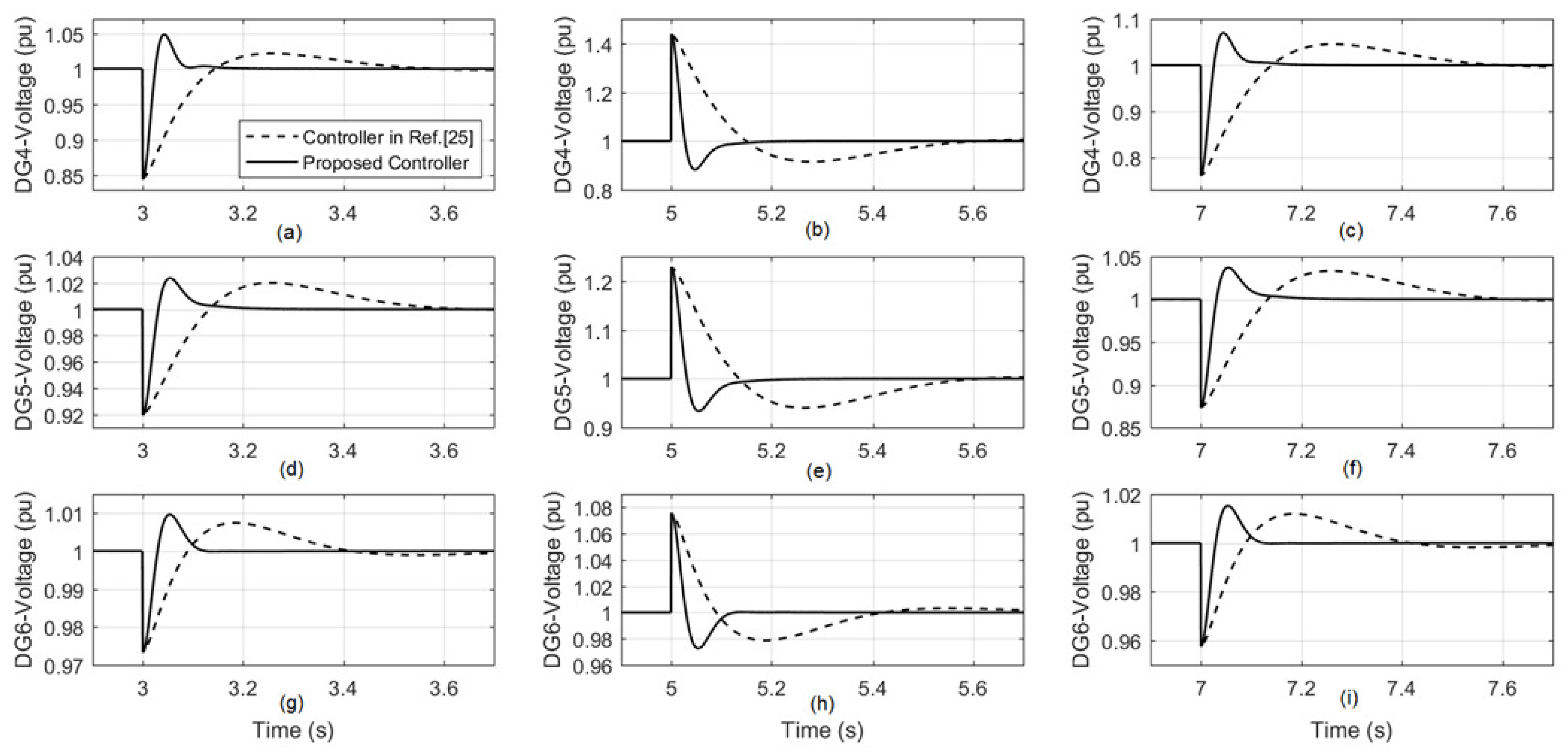
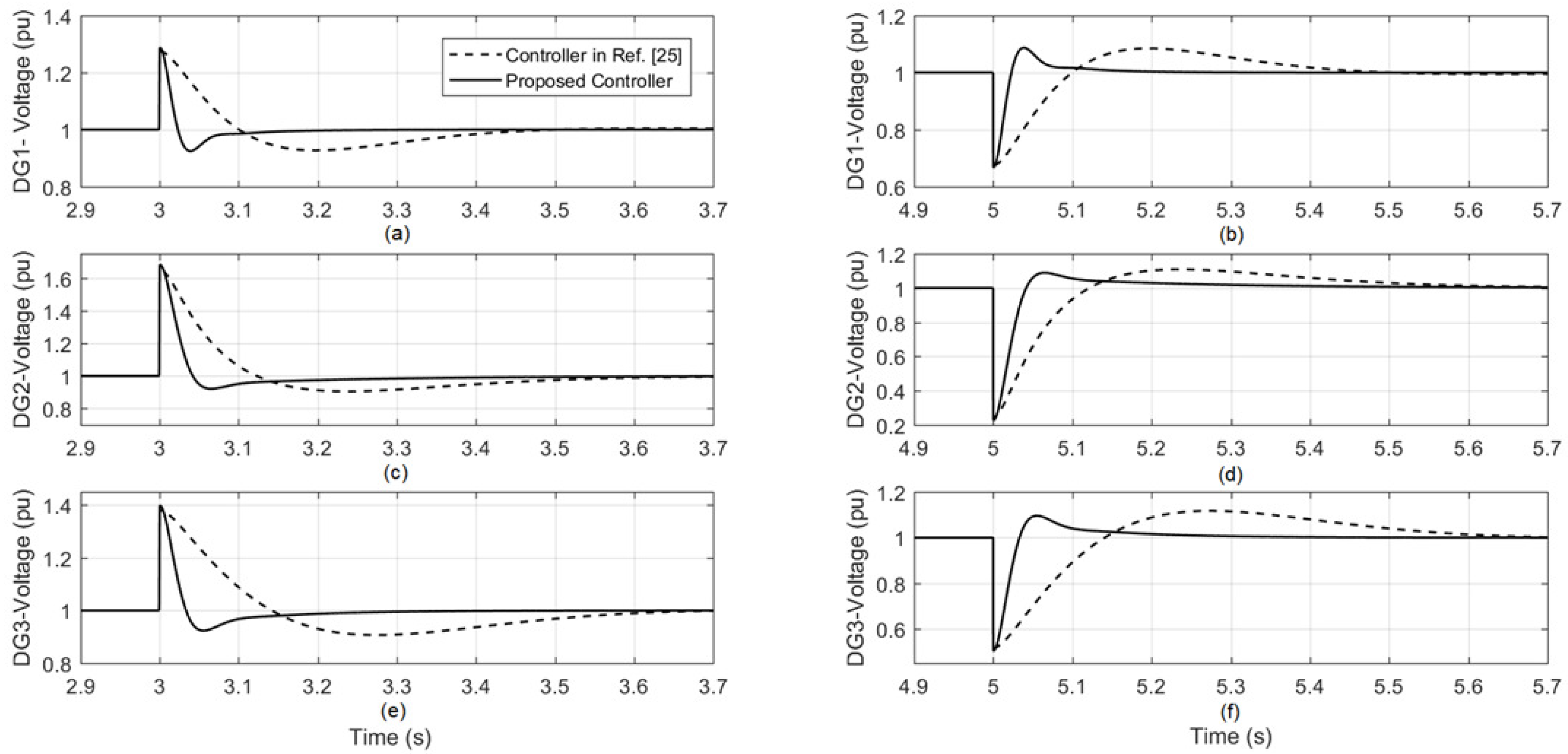
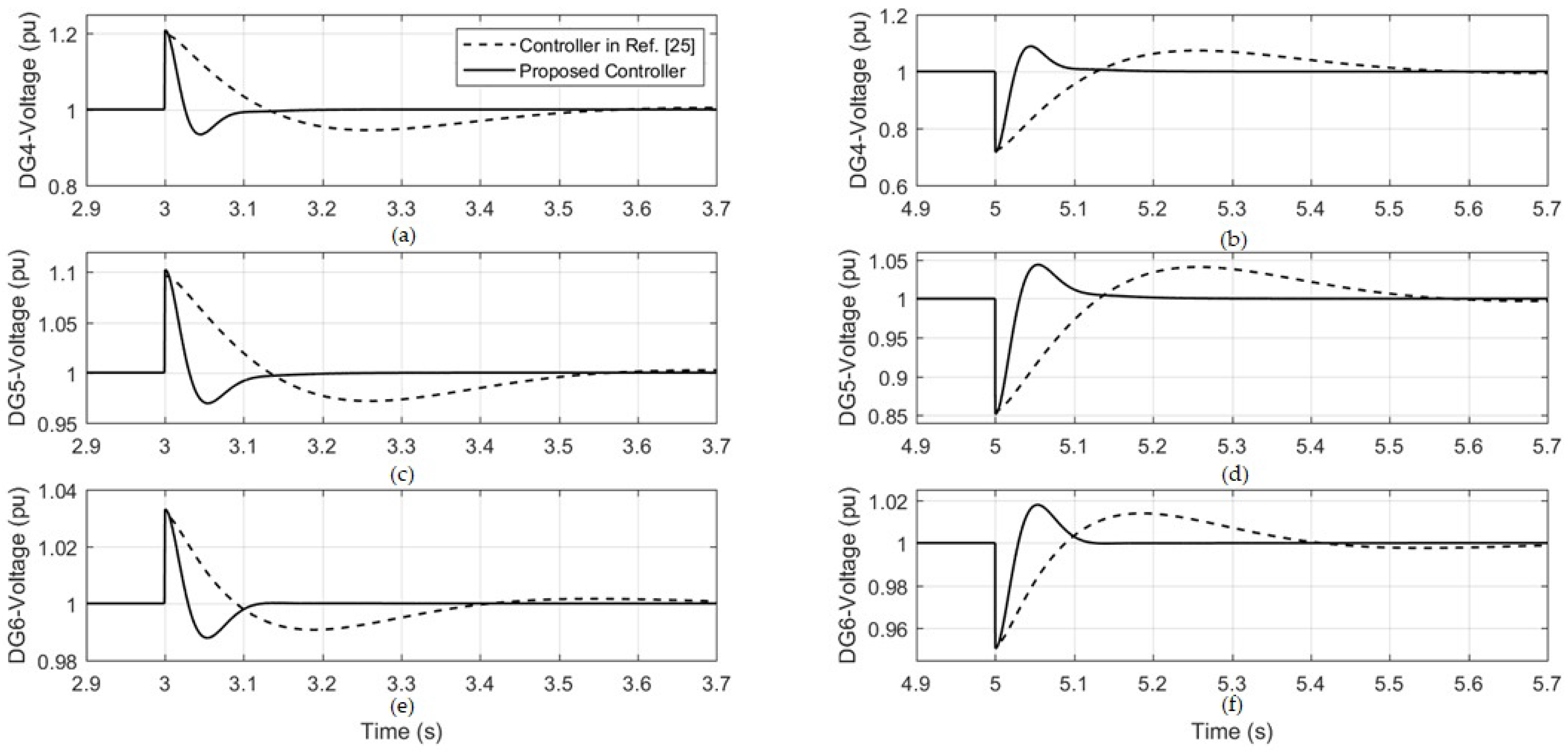
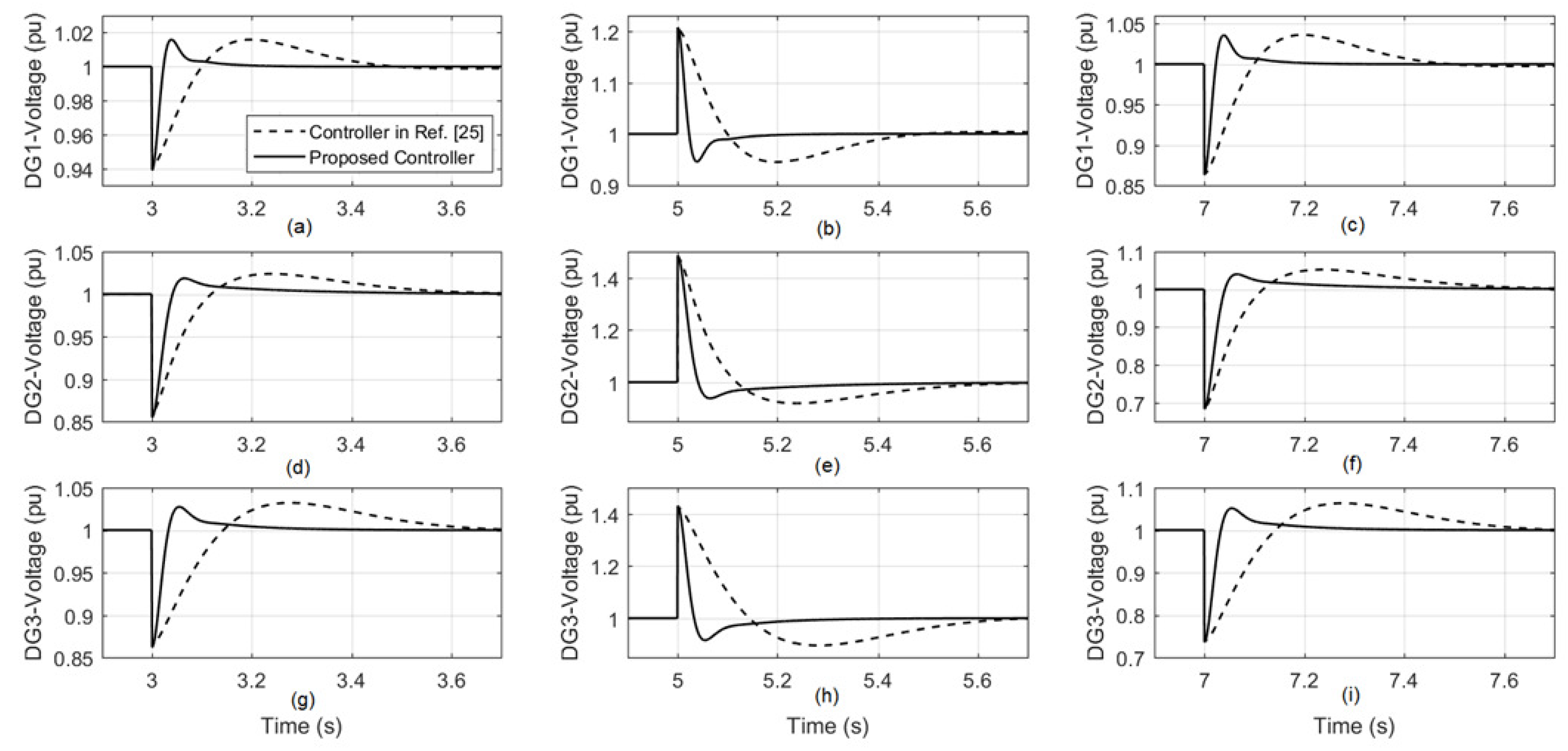
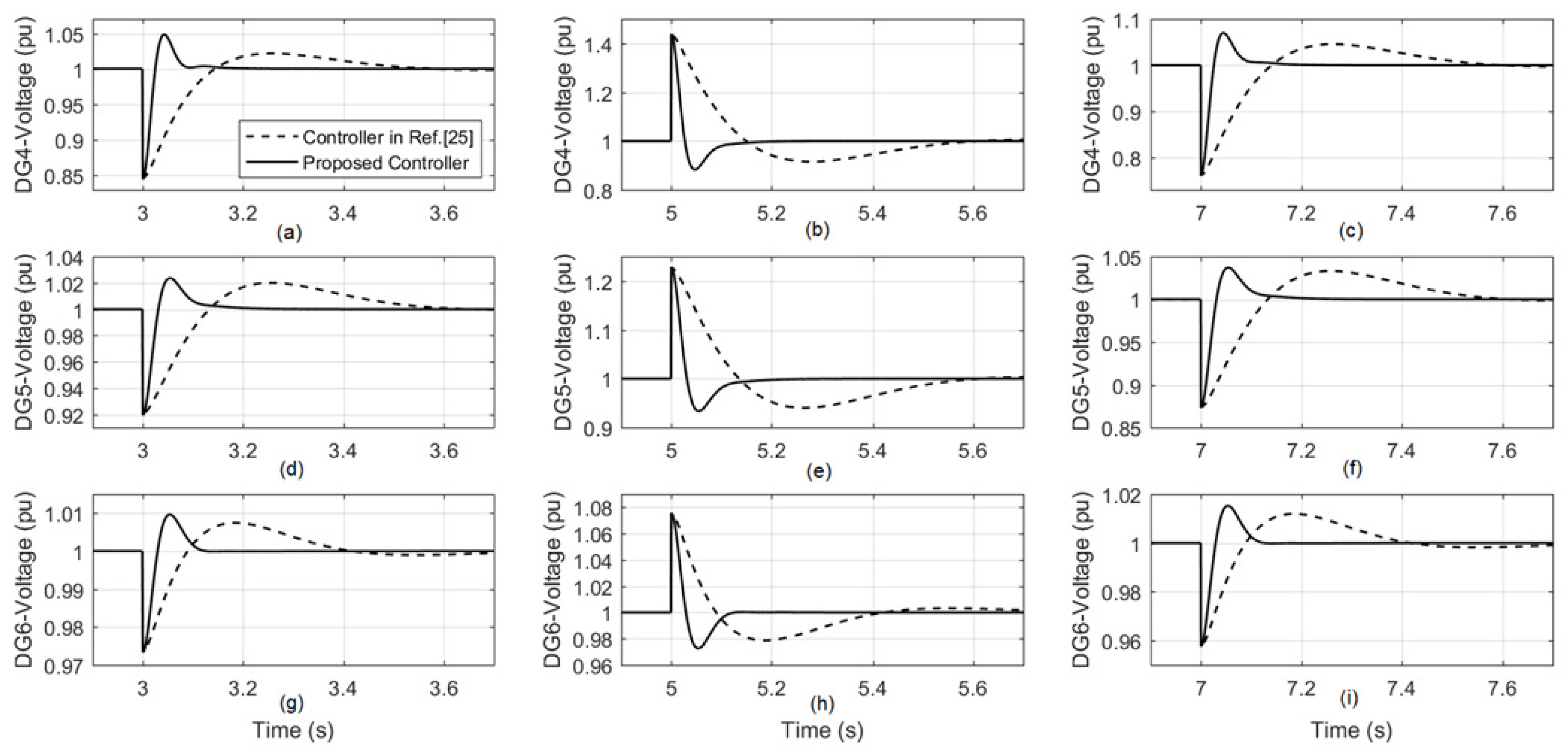
5.1. Case (1): Plug and Play (PnP) Potentials of DGs
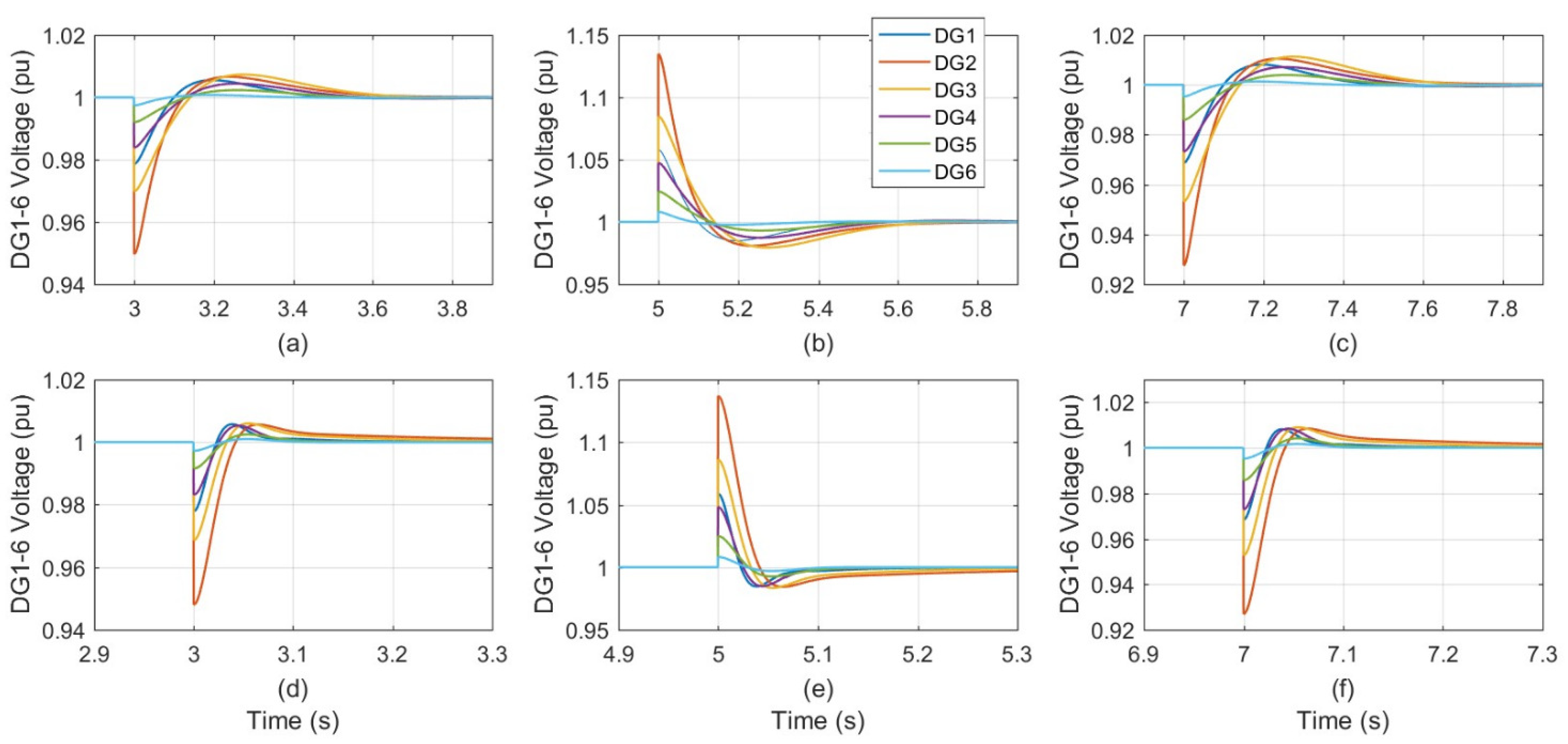
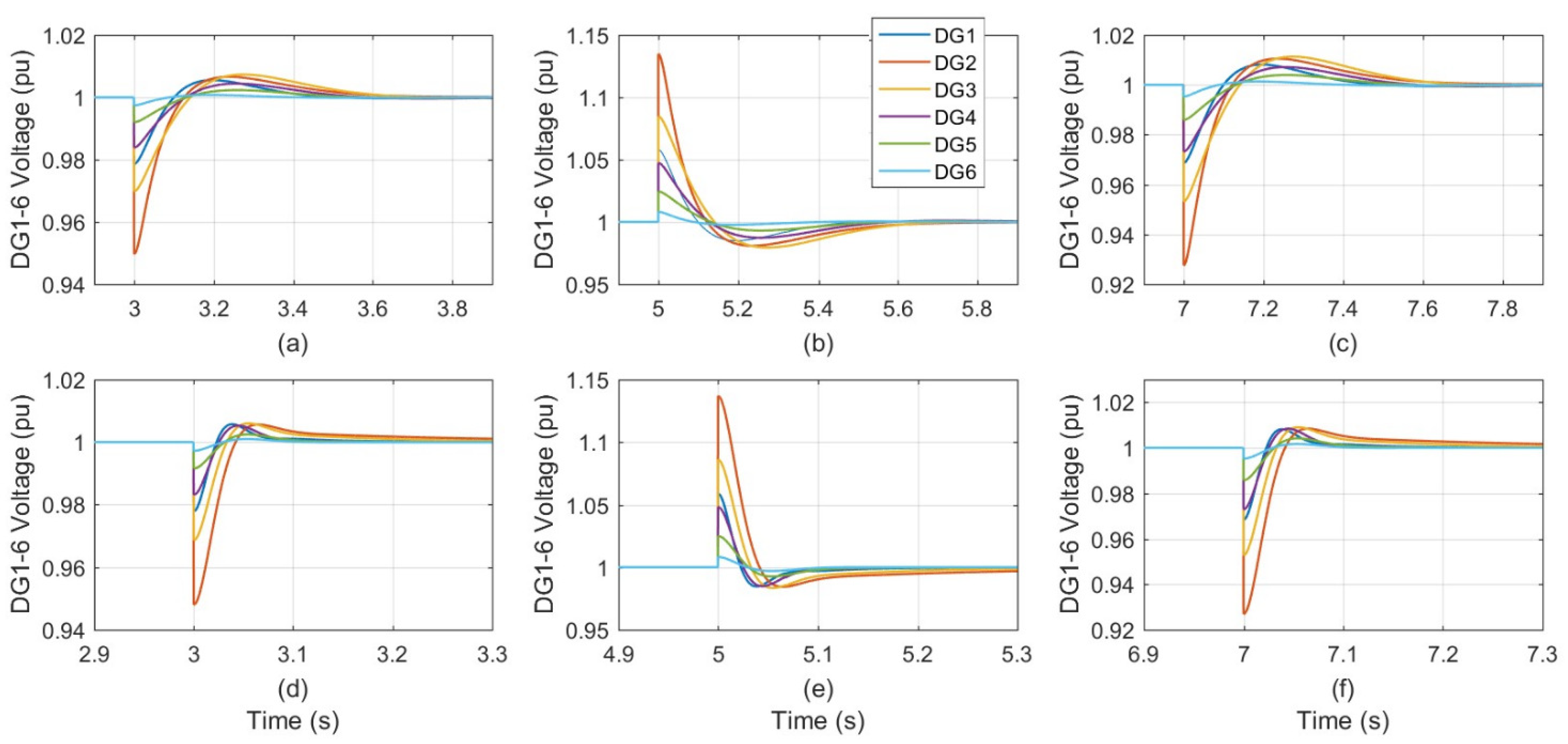
5.2. Case (2): Change in Distribution Line (DL) Parameter
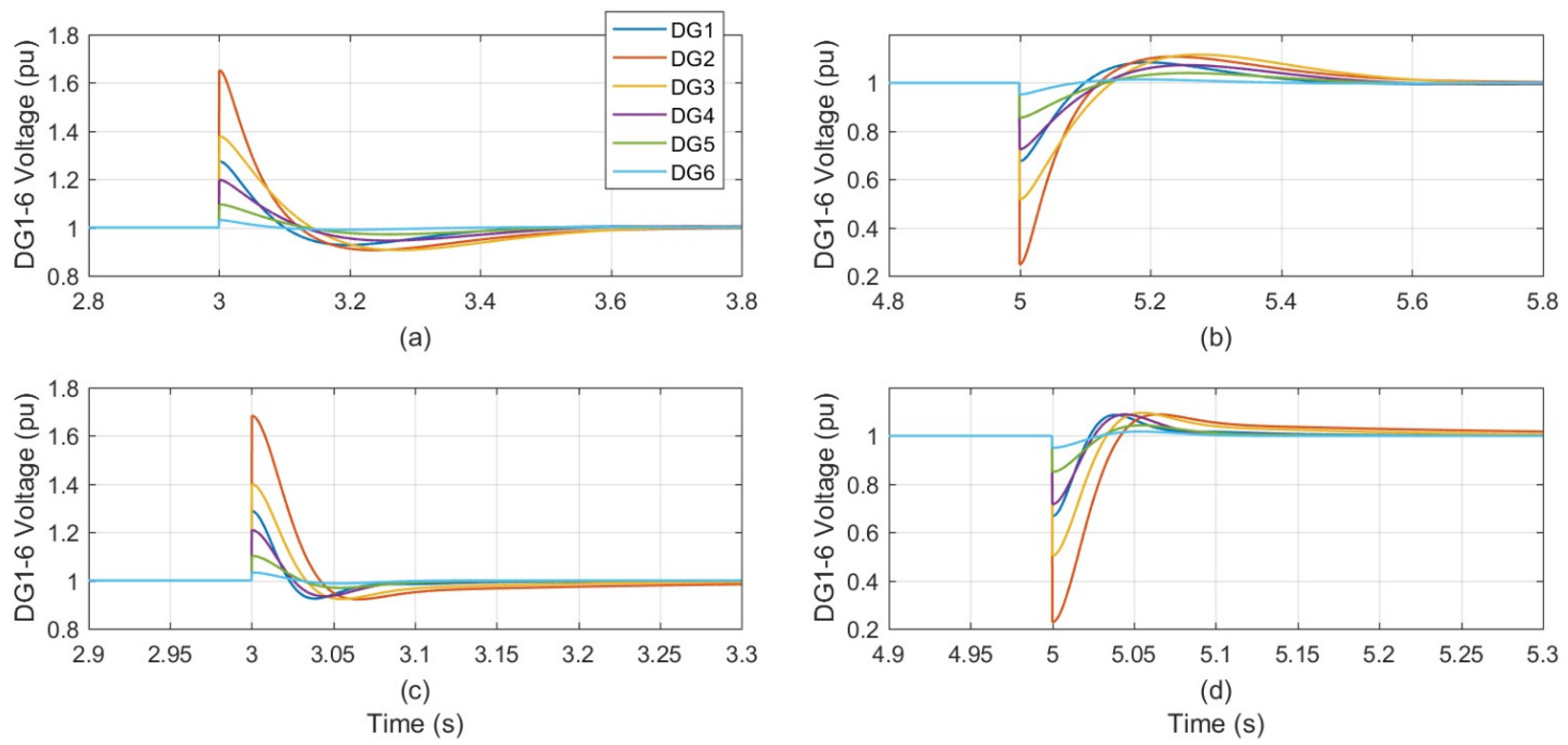
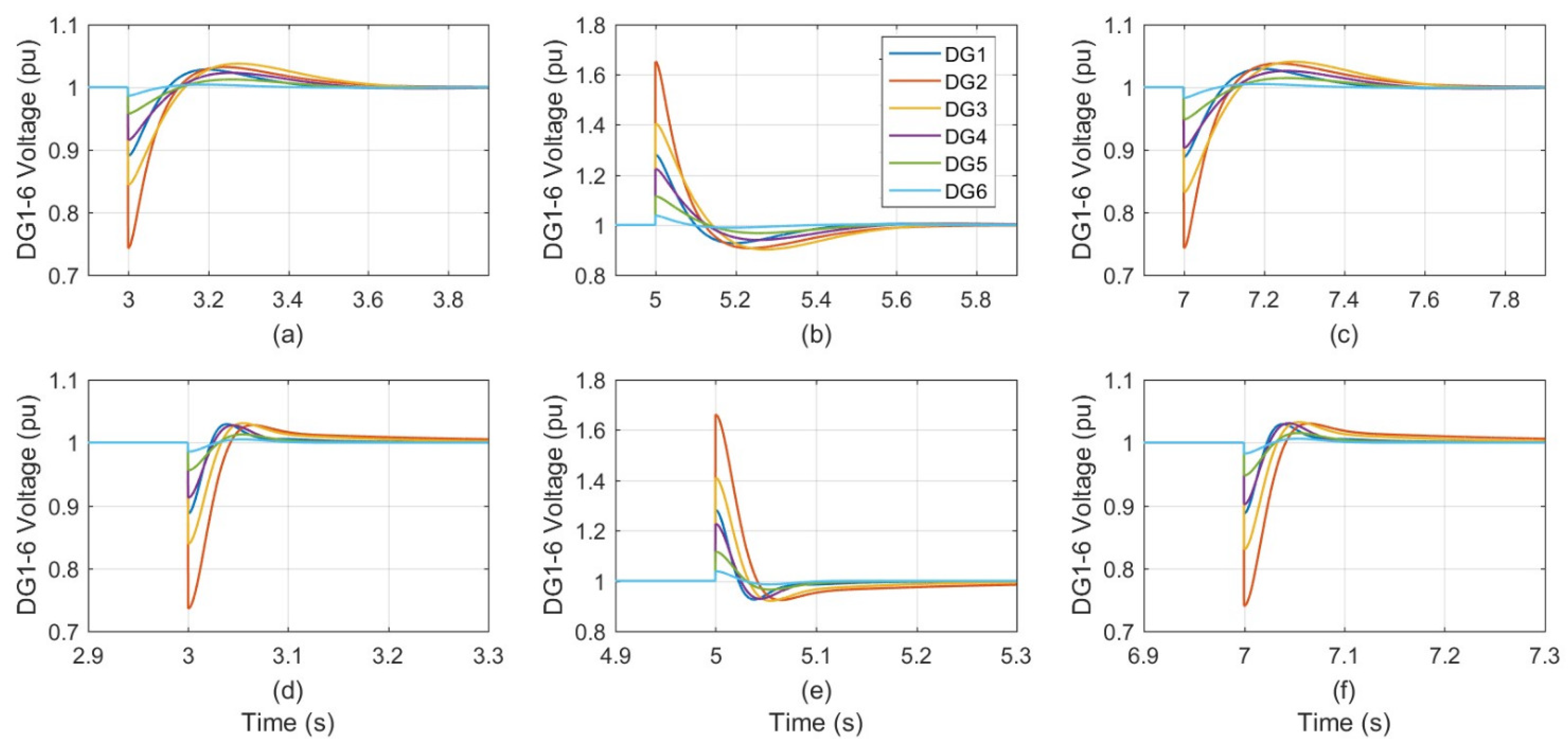
5.3. Case (3): Change in Load
5.4. Scenario (1): A Change in DG2 Load
5.5. Scenario (2): A Change in DG2 Load
5.6. Scenario (3): DG2 Load Connecting and Disconnecting (ON/OFF)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Proof Lemma 1 (the Extended Version of η-Dissipativity Property)
References
- Fan, L. Control and Dynamics in Power Systems and Microgrids; Taylor & Francis Group: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bevrani, H.; Francois, B.T.I. Microgrid Dynamics and Control; John Wiley & Sons, Inc.: New York, NY, USA, 2017. [Google Scholar]
- De Souza, A.C.Z.; Castilla, M. Microgrids Design and Implementation; Springer Nature Switzerland, AG: Cham, Switzerland, 2019. [Google Scholar]
- Sallam, A.; Malik, O. Electric Distribution Systems; John Wiley & Sons: New York, NY, USA, 2019. [Google Scholar]
- Bayoumi, E.; Soliman, M.; Soliman, H.M. Disturbance-rejection voltage control of an isolated microgrid by invariant sets. IET Renew. Power Gener. 2020, 14, 2331–2339. [Google Scholar] [CrossRef]
- Mehdi, M.; Saad, M.; Jamali, S.Z.; Kim, C.H. Output-feedback based robust controller for uncertain DC islanded microgrid. Trans. Inst. Meas. Control. 2020, 42, 1239–1251. [Google Scholar] [CrossRef]
- Mahmoud, M.S. Microgrid: Advanced Control Methods and Renewable Energy System Integration; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Li, X.; Liu, B.; Zhuo, F.; Ning, G. A novel control strategy based on DC bus signaling for DC micro-grid with photovoltaic and battery energy storage. In Proceedings of the In 2016 China International Conference on Electricity Distribution (CICED), Xi’an, China, 10–13 August 2016; IEEE: Toulouse, France, 2016; pp. 1–5. [Google Scholar]
- Kumar, R.; Pathak, M.K. Distributed droop control of dc microgrid for improved voltage regulation and current sharing. IET Renew. Power Gener. 2020, 14, 2499–2506. [Google Scholar] [CrossRef]
- Bharathi, G.; Kantharao, P.; Srinivasarao, R. Fuzzy logic control (FLC)-based coordination control of DC microgrid with energy storage system and hybrid distributed generation. Int. J. Ambient. Energy 2021, 43, 4255–4271. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S.; Arévalo, P. A Novel Fuzzy-Logic-Based Control Strategy for Power Smoothing in High-Wind Penetrated Power Systems and Its Validation in a Microgrid Lab. Electronics 2023, 12, 1721. [Google Scholar] [CrossRef]
- Kramer, O. Genetic algorithms. In Genetic Algorithm Essentials; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Kler, D.; Kumar, V.; Rana, K.P. Optimal integral minus proportional derivative controller design by evolutionary algorithm for thermal-renewable energy-hybrid power systems. IET Renew. Power Gener. 2019, 13, 2000–2012. [Google Scholar] [CrossRef]
- Che, L.; Shahidehpour, M. DC microgrids: Economic operation and enhancement of resilience by hierarchical control. IEEE Trans. Smart Grid 2014, 5, 2517–2526. [Google Scholar]
- Wang, P.; Xiao, J.; Setyawan, L.; Jin, C.; Hoong, C.F. Hierarchical control of active hybrid energy storage system (HESS) in DC microgrids. In Proceedings of the In 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; IEEE: Toulouse, France, 2014; pp. 569–574. [Google Scholar]
- Tavakoli, S.D.; Khajesalehi, J.; Hamzeh, M.; Sheshyekani, K. Decentralised voltage balancing in bipolar dc microgrids equipped with trans-z-source interlinking converter. IET Renew. Power Gener. 2016, 10, 703–712. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hatziargyriou, N. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Islam, S.; Agarwal, S.; Shyam, A.B.; Ingle, A.; Thomas, S.; Anand, S.; Sahoo, S.R. Ideal current-based distributed control to compensate line impedance in DC microgrid. IET Power Electron. 2018, 11, 1178–1186. [Google Scholar] [CrossRef]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Cooperative Synchronization in Distributed Microgrid Control; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Tucci, M.; Riverso, S.; Vasquez, J.C.; Guerrero, J.M.; Ferrari-Trecate, G. Decentralized scalable approach to voltage control of DC islanded microgrids. IEEE Trans. Control. Syst. Technol. 2016, 24, 1965–1979. [Google Scholar] [CrossRef]
- Firdaus, A.; Mishra, S. Auxiliary signal-assisted droop-based secondary frequency control of inverter-based PV microgrids for improvement in power sharing and system stability. IET Renew. Power Gener. 2019, 13, 2328–2337. [Google Scholar] [CrossRef]
- Nahata, P.; Soloperto, R.; Tucci, M.; Martinelli, A.; Ferrari-Trecate, G. A passivity-based approach to voltage stabilization in DC microgrids with ZIP loads. Automatica 2020, 113, 108770. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Orrante-Sakanassi, J.A. Energy-Based Control of Electromechanical Systems A Novel Passivity-Based Approach; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Ortega, R.; Romero, J.G.; Borja, P.; Donaire, A. PID Passivity-Based Control of Nonlinear Systems with Applications; John Wiley: New York, NY, USA, 2021. [Google Scholar]
- Soliman, H.M.; Bayoumi, E.H.; El-Sheikhi, F.A.; Ibrahim, A.M. Ellipsoidal-Set Design of the Decentralized Plug and Play Control for Direct Current Microgrids. IEEE Access 2021, 9, 96898–96911. [Google Scholar] [CrossRef]
- Poznyak, A.; Polyakov, A.; Azhmyakov, V. Attractive Ellipsoids in Robust Control; Birkhauser: Boston, MA, USA, 2014. [Google Scholar]
- Cucuzzella, M.; Cucuzzella, K.; Kosaraju, K.; Kosaraju, M.; Scherpen, M.A. Distributed Passivity-Based Control of DC Microgrids. In Proceedings of the American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Malan, A.; Jané-Soniera, P.; Strehle, F.; Hohmann, S. Passivity-based power sharing and voltage regulation in DC microgrids with un-actuated buses. Syst. Control. 2023, 2301, 13533. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Pearson: San Antonio, TX, USA, 2014. [Google Scholar]
- Loranca-Coutiño, J.; Mayo-Maldonado, J.C.; Escobar, G.; Maupong, T.M.; Valdez-Resendiz, J.E.; Rosas-Caro, J.C. Data-Driven Passivity-Based Control Design for Modular DC Microgrids. IEEE Trans. Ind. Electron. 2022, 69, 2545–2556. [Google Scholar] [CrossRef]
- Magaldi, G.; Serra, F.M. andde Angelo, C.; Montoya, O.; Giral-Ramírez, D. Voltage Regulation of an Isolated DC Microgrid with a Constant Power Load: A Passivity-based Control Design. Electronics 2021, 10, 2085. [Google Scholar] [CrossRef]
- Sadabadi, M.S.; Shafiee, Q.; Karimi, A. Plug-and-play robust voltage control of DC microgrids. IEEE Trans. Smart Grid 2017, 9, 6886–6896. [Google Scholar] [CrossRef]
- IEEE Standards Association. IEEE Std 1159-IEEE Recommended Practice for Monitoring Electric Power Quality; IEEE: Toulouse, France, 2009. [Google Scholar]
- Awad, H.; Bayoumi, E.; Soliman, H.; De Santis, M. Robust Tracker of Hybrid Microgrids by the Invariant-Ellipsoid Set. Electronics 2021, 10, 1794. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Buck Converter Resistance () | Buck Converter Inductance (mH) | Shunt Capacitor (mF) | Load Parameter R () | Rated Power (W) | |
|---|---|---|---|---|---|
| 7.220 | 72.2 | 25.0 | 160.0 | 1200 | |
| 14.440 | 144.0 | 32.0 | 80.0 | 600 | |
| 10.830 | 108.0 | 25.0 | 120.0 | 900 | |
| 7.220 | 72.20 | 30.0 | 160.0 | 1200 | |
| 14.400 | 144.0 | 18.0 | 100.0 | 800 | |
| 10.830 | 108.0 | 12.0 | 120.0 | 900 | |
| ⸻ | ⸻ | ⸻ | ⸻ | ⸻ | ⸻ |
| DC bus | voltage: | = 100 V | |||
| Switching | frequency: | = 40 kHz | |||
| Nominal | frequency: | = 50 Hz |
| Line Impedance | Line Resistance per Unit Length (/m) | Cable Length (m) | Line Resistance () | Line Inductance per Unit Length (H/m) | Line Inductance (H) |
|---|---|---|---|---|---|
| 0.050 | 180 | 9 | 1.8 | 324 | |
| 0.050 | 240 | 12 | 1.8 | 432 | |
| 0.050 | 300 | 15 | 1.8 | 540 | |
| 0.050 | 240 | 12 | 1.8 | 432 | |
| 0.050 | 264 | 13.2 | 1.8 | 475.2 |
| Zone DG Disconnection | Zero Matrix Detection | |
|---|---|---|
| 1 | ||
| 2 | , | |
| 3 | , | |
| 4 | , | |
| 5 |
| Time (s) | (±10% Change) |
|---|---|
| 0–3 | 100% |
| 3–5 | 90% |
| 5–7 | 110% |
| >7 | 100% |
| Time (s) | Load Change () | Load Change () | 100% On/Off Load |
|---|---|---|---|
| 0–3 | 100% | 100% | On |
| 3–5 | 90% | 60% | Off |
| 5–7 | 110% | 140% | On |
| >7 | 100% | 100% | Off |
| # of Cases | Scenarios | Occurrence/Type | This Control | Control in [25] | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DG1 | DG2 | DG3 | DG4 | DG5 | DG6 | DG1 | DG2 | DG3 | DG4 | DG5 | DG6 | |||||
| Unplug | %Overshoot | 29.30 | 66.70 | 39.80 | 21.30 | 10.20 | 3.62 | 29.20 | 66.50 | 89.50 | 21.10 | 9.93 | 3.54 | |||
| DG2 | Rise Time(s) | 0.027 | 0.034 | 0.029 | 0.027 | 0.028 | 0.029 | 0.102 | 0.113 | 0.120 | 0.092 | 0.094 | 0.112 | |||
| 5.1 | Settling Time(s) | 0.103 | 0.202 | 0.187 | 0.101 | 0.116 | 0.101 | 0.347 | 0.353 | 0.367 | 0.35 | 0.351 | 0.392 | |||
| Link | %Overshoot | 9.34 | 9.76 | 9.56 | 8.56 | 4.83 | 1.92 | 9.29 | 10.82 | 11.73 | 8.21 | 4.78 | 1.78 | |||
| back | Rise Time(s) | 0.028 | 0.035 | 0.031 | 0.028 | 0.029 | 0.031 | 0.103 | 0.109 | 0.011 | 0.903 | 0.922 | 0.983 | |||
| 5.1 | DG2 | Settling Time(s) | 0.104 | 0.201 | 0.184 | 0.108 | 0.121 | 0.103 | 0.352 | 0.361 | 0.371 | 0.349 | 0.348 | 0.389 | ||
| %Overshoot | 1.87 | 2.35 | 3.25 | 5.03 | 2.31 | 1.09 | 1.90 | 2.65 | 3.67 | 3.78 | 0.21 | 0.87 | ||||
| from 100% | Rise Time(s) | 0.012 | 0.022 | 0.024 | 0.029 | 0.021 | 0.198 | 0.115 | 0.123 | 0.174 | 0.189 | 0.165 | 0.115 | |||
| 5.2 | to 90% | Settling Time(s) | 0.087 | 0.115 | 0.187 | 0.193 | 0.105 | 0.095 | 0.397 | 0.356 | 0.361 | 0.352 | 0.351 | 0.394 | ||
| %Overshoot | 20.9 | 46.72 | 41.74 | 41.56 | 23.42 | 7.23 | 20.86 | 45.51 | 40.89 | 41.02 | 23.28 | 7.09 | ||||
| from 90% | Rise Time(s) | 0.014 | 0.021 | 0.024 | 0.024 | 0.023 | 0.019 | 0.093 | 0.122 | 0.151 | 0.151 | 0.156 | 0.102 | |||
| 5.2 | to 110% | Settling Time(s) | 0.109 | 0.213 | 0.236 | 0.231 | 0.241 | 0.157 | 0.413 | 0.572 | 0.592 | 0.590 | 0.582 | 0.392 | ||
| %Overshoot | 3.782 | 5.341 | 6.893 | 7.981 | 4.105 | 1.745 | 3.965 | 7.204 | 8.021 | 6.721 | 3.874 | 1.627 | ||||
| from 110% | Rise Time(s) | 0.013 | 0.021 | 0.024 | 0.025 | 0.025 | 0.178 | 0.097 | 0.123 | 0.156 | 0.176 | 0.165 | 0.137 | |||
| 5.2 | to 100% | Settling Time(s) | 0.089 | 0.201 | 0.231 | 0.241 | 0.024 | 0.015 | 0.408 | 0.562 | 0.595 | 0.521 | 0.532 | 0.371 | ||
| %Overshoot | 0.472 | 0.645 | 0.673 | 0.481 | 0.245 | 0.131 | 0.623 | 0.812 | 0.915 | 0.614 | 0.432 | 0.213 | ||||
| from 100% | Rise Time(s) | 0.008 | 0.054 | 0.032 | 0.008 | 0.007 | 0.004 | 0.125 | 0.167 | 0.171 | 0.123 | 0.112 | 0.080 | |||
| 5.4 | to 90% | Settling Time(s) | 0.088 | 0.207 | 0.201 | 0.102 | 0.075 | 0.053 | 0.453 | 0.464 | 0.561 | 0.551 | 0.557 | 0.352 | ||
| %Overshoot | 0.287 | 0.372 | 0.415 | 0.284 | 0.134 | 0.083 | 0.308 | 0.472 | 0.486 | 0.321 | 0.237 | 0.106 | ||||
| from 100% | Rise Time(s) | 0.032 | 0.043 | 0.094 | 0.083 | 0.062 | 0.021 | 0.073 | 0.164 | 0.189 | 0.183 | 0.167 | 0.158 | |||
| 5.5 | to 60% | Settling Time(s) | 0.174 | 0.278 | 0.289 | 0.291 | 0.157 | 0.105 | 0.452 | 0.592 | 0.601 | 0.583 | 0.432 | 0.377 | ||
| Load is | %Overshoot | 6.47 | 10.83 | 11.34 | 6.89 | 3.83 | 2.35 | 6.32 | 12.15 | 12.73 | 6.77 | 4.32 | 2.11 | |||
| attached | Rise Time(s) | 0.031 | 0.047 | 0.042 | 0.037 | 0.031 | 0.034 | 0.941 | 0.105 | 0.131 | 0.145 | 0.097 | 0.082 | |||
| 5.6 | (on) | Settling Time(s) | 0.134 | 0.255 | 0.247 | 0.137 | 0.081 | 0.063 | 0.415 | 0.554 | 0.582 | 0.542 | 0.413 | 0.187 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poznyak, A.S.; Soliman, H.M.; Alazki, H.; Bayoumi, E.H.E.; De Santis, M. Attractive Ellipsoid Technique for a Decentralized Passivity-Based Voltage Tracker for Islanded DC Microgrids. Energies 2024, 17, 1529. https://doi.org/10.3390/en17071529
Poznyak AS, Soliman HM, Alazki H, Bayoumi EHE, De Santis M. Attractive Ellipsoid Technique for a Decentralized Passivity-Based Voltage Tracker for Islanded DC Microgrids. Energies. 2024; 17(7):1529. https://doi.org/10.3390/en17071529
Chicago/Turabian StylePoznyak, Alexander S., Hisham M. Soliman, Hussain Alazki, Ehab H. E. Bayoumi, and Michele De Santis. 2024. "Attractive Ellipsoid Technique for a Decentralized Passivity-Based Voltage Tracker for Islanded DC Microgrids" Energies 17, no. 7: 1529. https://doi.org/10.3390/en17071529
APA StylePoznyak, A. S., Soliman, H. M., Alazki, H., Bayoumi, E. H. E., & De Santis, M. (2024). Attractive Ellipsoid Technique for a Decentralized Passivity-Based Voltage Tracker for Islanded DC Microgrids. Energies, 17(7), 1529. https://doi.org/10.3390/en17071529