
Probabilistic Design Methods for Gust-Based Loads on Wind Turbines





Abstract
1. Introduction
2. Methods
2.1. Semiprobabilistic Design Methods
- is the partial safety factor for the strength;
- is the characteristic value of the steel’s yield strength;
- is the partial safety factor for the load;
- is the characteristic moment load;
- W is the section modulus.
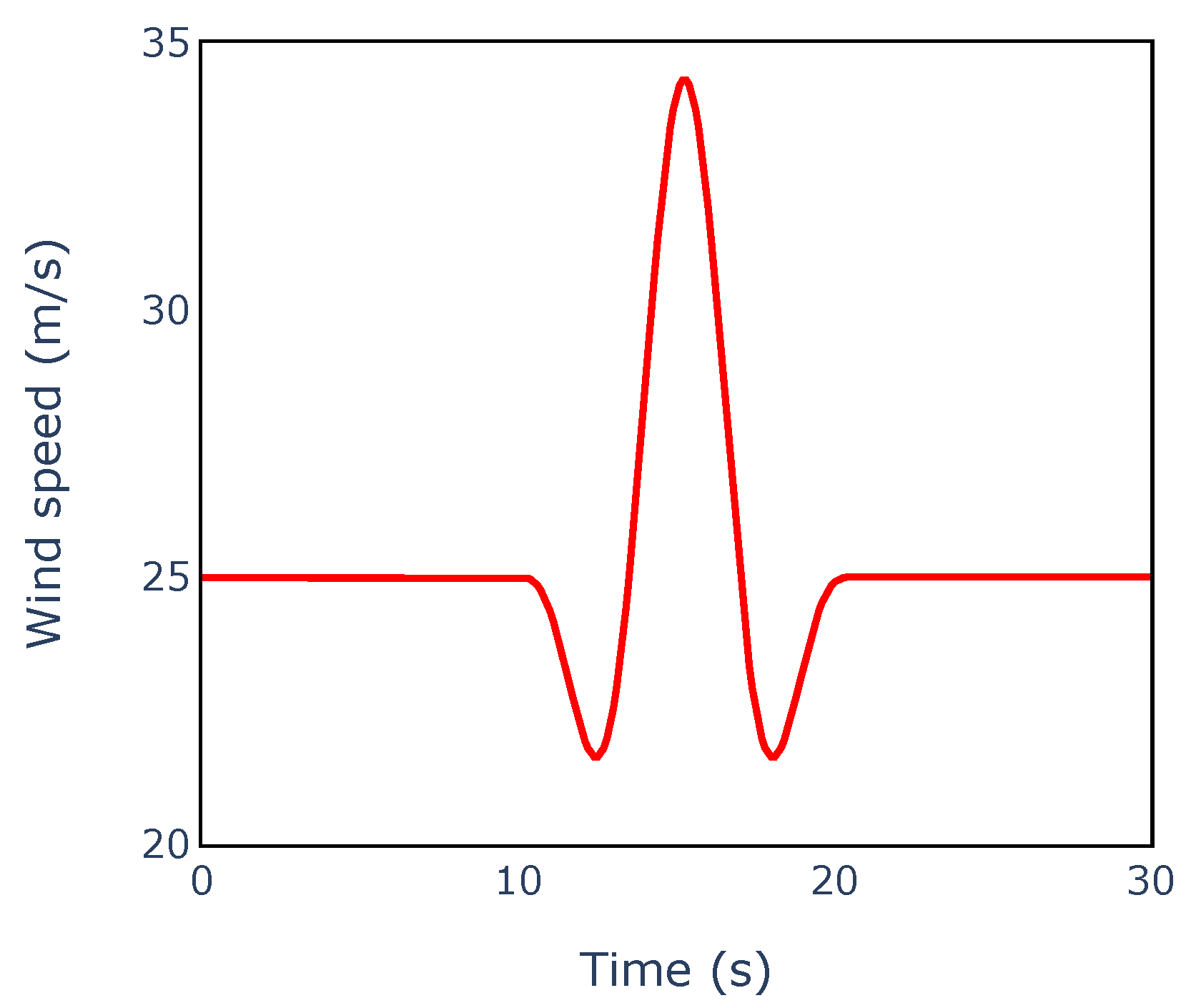
2.1.1. Extreme Operating Gust (EOG)
- Time of the lowest wind speed;
- Time of the highest gust acceleration;
- Time of the maximum wind speed.
2.1.2. Normal Turbulence Model (NTM)
2.1.3. Inverse-FORM (iFORM)
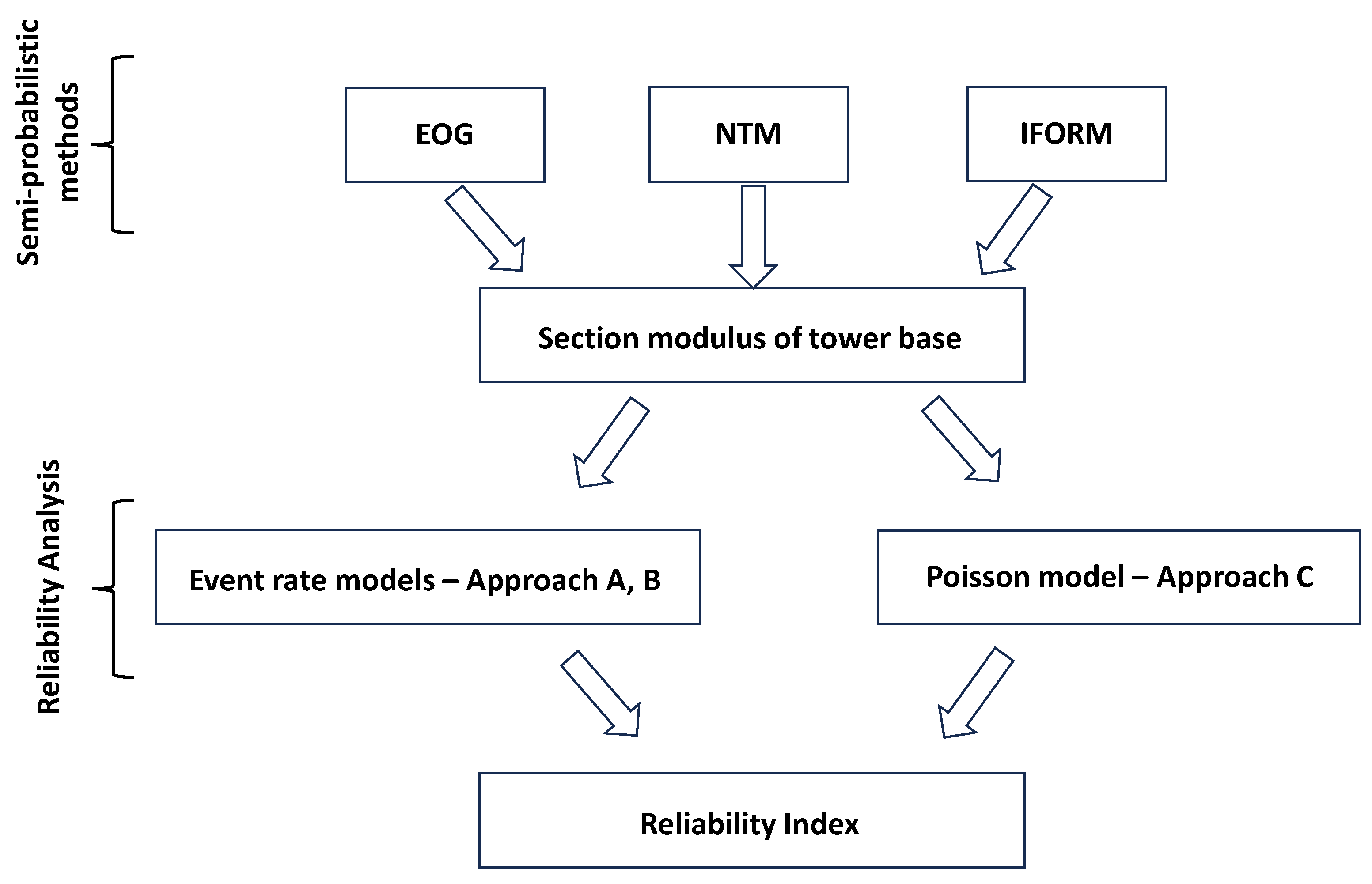
2.2. Reliability Analysis
- Approach A—reliability analysis using load distribution aggregated over environmental conditions and multiplying by the event rate;
- Approach B—reliability analysis for each bin of environmental conditions and multiplying by the occurrence probability for the bin and event rate;
- Approach C—reliability analysis using an aggregated load distribution and a Poisson model for the event occurrence [14].
- : model uncertainty for the resistance model;
- : physical, model, and statistical uncertainty in the steel strength;
- : model uncertainty in the stress/strain model;
- : uncertainty in the site/atmospheric conditions;
- : physical model uncertainty in aerodynamic properties;
- : model uncertainty in the aeroelastic model;
- : physical uncertainty in the material, geometrical properties;
- : model uncertainty in the wind model;
- : statistical uncertainty in the simulation setup;
- W: section modulus.
2.2.1. Approach A
- is the distribution for the maximum moment given an event happening when the wind speed is and the turbulence intensity is ;
- is the probability for turbulence bin given wind speed bin ;
- is the probability of wind speed bin .
2.2.2. Approach B
2.2.3. Approach C
3. Example
3.1. Section Modulus of the Wind Turbine Tower
- Extreme operating gust (EOG), using characteristic values and partial safety factors according to IEC 61400-1 [3];
- Normal turbulence model (NTM), using characteristic values and partial safety factors according to IEC 61400-1 [3];
- Inverse first-order reliability method (iFORM) [23], used to obtain characteristic value of the load effect.
3.1.1. Extreme Operating Gust
3.1.2. Normal Turbulence Model
3.1.3. Inverse-FORM
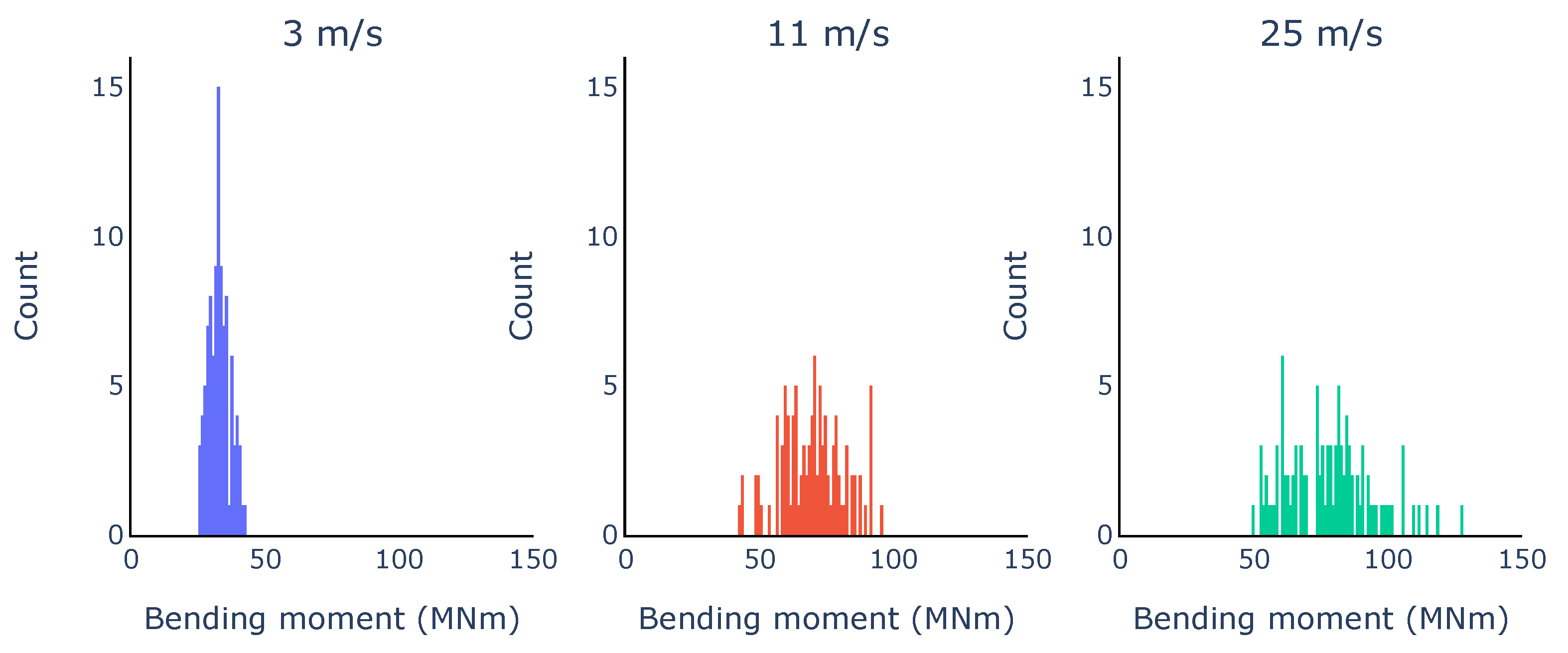
- Combinations of the hub-height mean wind speed (V) and the turbulence intensity (I), accounting for the entire operational range of the turbine, were initially defined. Twelve wind speeds, from the cut-in (3 m/s) to the cut-out (25 m/s) values, stepped at 2 m/s and 3 turbulence intensities (10%, 20%, and 30%) were used.
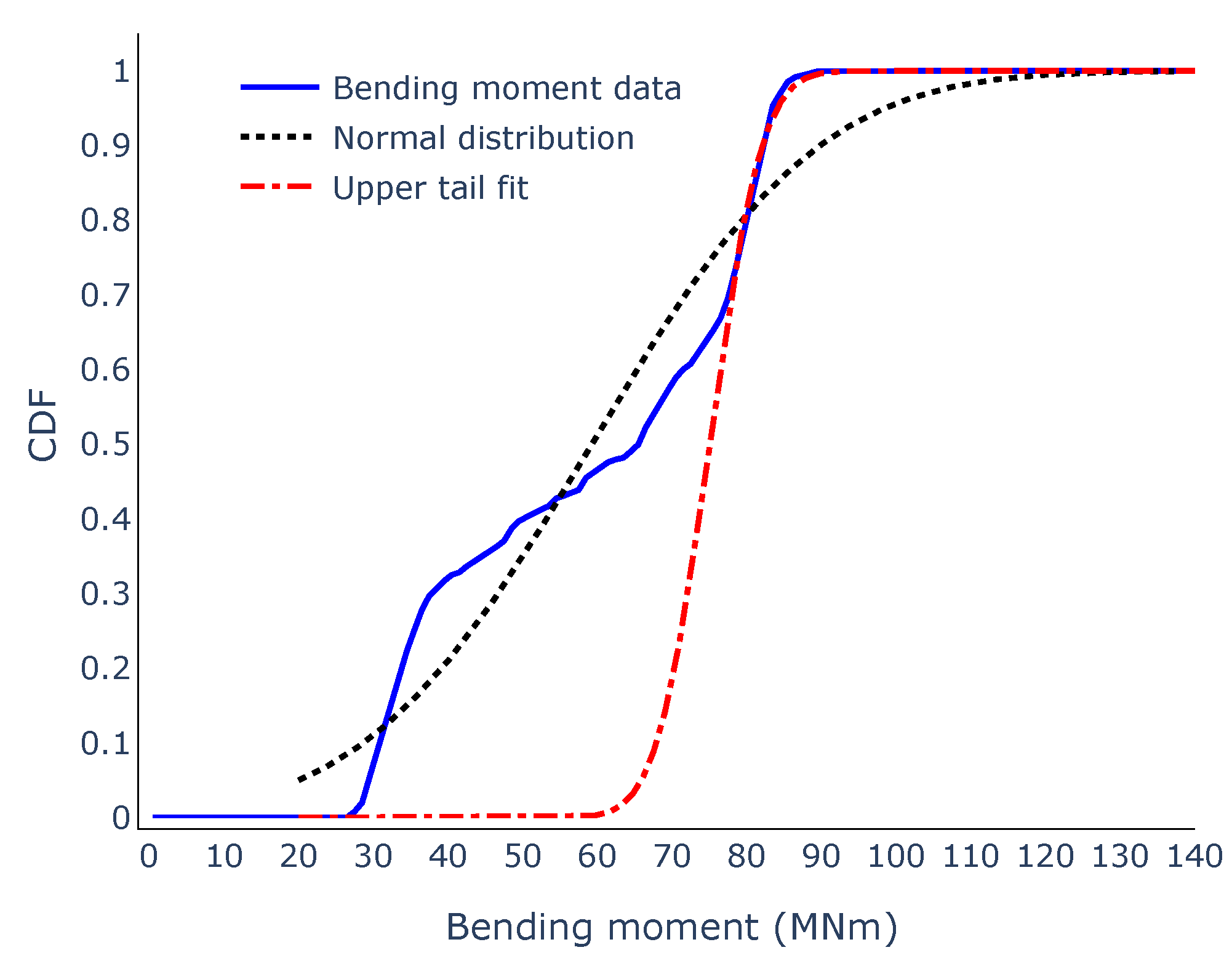
- For each combination of mean wind speed and turbulence intensity, 100 stochastic simulations were carried out using the same set of wind seeds for a total of 3600 simulations. The extreme response after the electrical fault was sampled. For each combination of wind speed and turbulence, a normal distribution was fitted to the extreme responses.
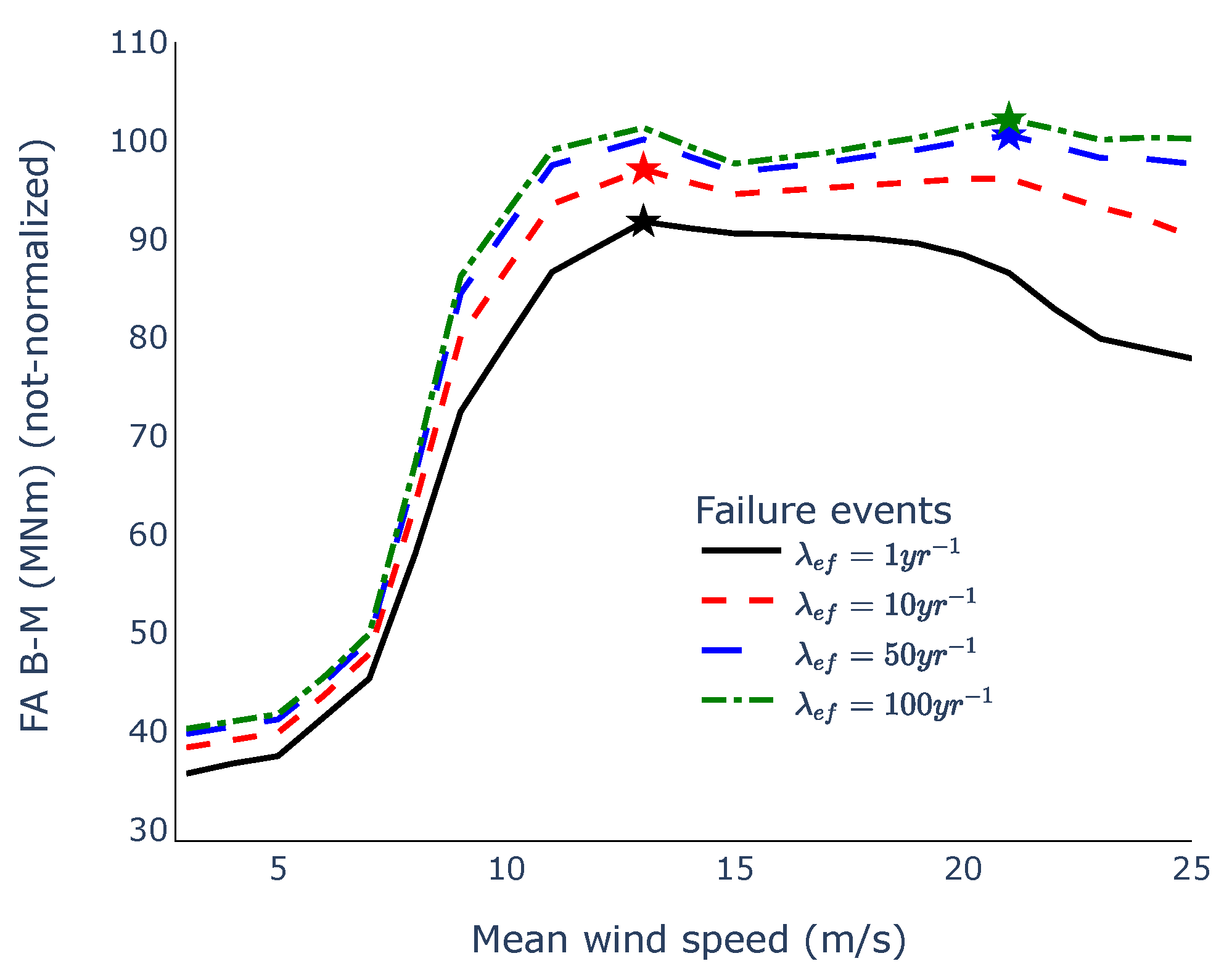
- iFORM was applied for different failure rates.
3.1.4. Summary of Section Moduli
3.2. Reliability Analysis
Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- GWEC. Global Wind Report—2022; Global Wind Energy Council: Lisbon, Portugal, 2022. [Google Scholar]
- Stehly, T.; Duffy, P. 2020 Cost of Wind Energy Review; Technical Report NREL/TP-5000-81209; National Renewable Energy Laboratory: Golden, CO, USA, 2022. [Google Scholar]
- IEC 61400-1:2019; Wind Energy Generation Systems—Part 1: Design Requirements. International Electrotechnical Commission: Geneva, Switzerland, 2019.
- Sørensen, J.D.; Frandsen, S.; Tarp-Johansen, N.J. Effective turbulence models and fatigue reliability in wind farms. Probabilistic Eng. Mech. 2008, 23, 531–538. [Google Scholar] [CrossRef]
- IEC 61400-3-1:2019; Wind Energy Generation Systems—Part 3-1: Design Requirements for Fixed Offshore Wind Turbines. International Electrotechnical Commission: Geneva, Switzerland, 2019.
- Freudenreich, K.; Argyriadis, K. Wind Turbine Load Level Based on Extrapolation and Simplified Methods. Wind. Energy 2008, 11, 589–600. [Google Scholar] [CrossRef]
- Sørensen, J.D.; Toft, H.S. Safety Factors—IEC 61400-1 ed. 4 Background Document; Technical Report; DTU Wind Energy-E-Report-0066(EN); Technical University of Denmark: Kongens Lyngby, Denmark, 2014. [Google Scholar]
- Sørensen, J.D.; Toft, H.S. Probabilistic design of wind turbines. Energies 2010, 3, 241–257. [Google Scholar] [CrossRef]
- Mendoza, J.; Nielsen, J.S.; Sørensen, J.D.; Köhler, J. Structural reliability analysis of offshore jackets for system-level fatigue design. Struct. Saf. 2022, 97, 102220. [Google Scholar] [CrossRef]
- Deviprasad, B.S.; Chatterjee, S. Reliability analysis of monopiles for offshore wind turbines under lateral loading. Ocean. Eng. 2024, 294, 116829. [Google Scholar] [CrossRef]
- Nielsen, J.S.; Miller-Branovacki, L.; Carriveau, R. Probabilistic and risk-informed life extension assessment of wind turbine structural components. Energies 2021, 14, 821. [Google Scholar] [CrossRef]
- Jiang, Z.; Hu, W.; Dong, W.; Gao, Z.; Ren, Z. Structural reliability analysis of wind turbines: A review. Energies 2017, 10, 2099. [Google Scholar] [CrossRef]
- Nielsen, J.S.; Toft, H.S.; Violato, G.O. Risk-Based Assessment of the Reliability Level for Extreme Limit States in IEC 61400-1. Energies 2023, 16, 1885. [Google Scholar] [CrossRef]
- IEC CD TS 61400-9; Wind Energy Generation Systems—Part 9: Probabilistic Design Measures for Wind Turbines. International Electrotechnical Commission: Geneva, Switzerland, 2023.
- Hannesdóttir, Á.; Kelly, M. Detection and characterization of extreme wind speed ramps. Wind. Energy Sci. 2019, 4, 385–396. [Google Scholar] [CrossRef]
- Hannesdóttir, Á.; Verelst, D.R.; Urbán, A.M. Extreme coherent gusts with direction change-probabilistic model, yaw control, and wind turbine loads. Wind. Energy Sci. 2023, 8, 231–245. [Google Scholar] [CrossRef]
- Bierbooms, W. Modelling of Gusts for the Determination of Extreme Loads of Pitch Regulated Wind Turbines. Wind. Eng. 2004, 28, 291–303. [Google Scholar] [CrossRef]
- Bierbooms, W. Specific gust shapes leading to extreme response of pitch-regulated wind turbines. J. Physics Conf. Ser. 2007, 75, 012058. [Google Scholar] [CrossRef]
- IEC 61400-1:2005; Wind Turbines—Part 1: Design Requirements. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Thesbjerg, L. Background for EOG in IEC 61400-1 Edition 3. Private communication.
- Zhang, X.; Dimitrov, N.K.; Nielsen, J.S.; Abeendranath, A.K.; Sørensen, J.D. Probwind D10: Pre-Standard for Probabilistic Design and Background Document; Technical Report; Aalborg University: Aalborg, Denmark, 2023. [Google Scholar]
- Tarp-Johansen, N.J. Electrical failure combined with EOG (DLC 2.3). In Proceedings of the MT01 Maintenance Cycle Meeting, Skærbæk, Denmark, 11–12 January 2007. DONG Energy. [Google Scholar]
- Winterstein, S.R.; Ude, T.C.; Cornell, C.A.; Bjerager, P.; Haver, S. Environmental parameters for extreme response: Inverse FORM with omission factors. In Proceedings of the ICOSSAR-93, Innsbruck, Austria, 9–13 August 1993; pp. 551–557. [Google Scholar]
- Fitzwater, L.M.; Cornell, C.A.; Veers, P.S. Using environmental contours to predict extreme events on wind turbines. In Proceedings of the Wind Energy Symposium, Madrid, Spain, 16–19 June 2003; Volume 75944, pp. 244–258. [Google Scholar]
- Dimitrov, N. Inverse Directional Simulation: An environmental contour method providing an exact return period. J. Physics Conf. Ser. 2023, 1618, 062048. [Google Scholar] [CrossRef]
- Saranyasoontorn, K.; Manuel, L. Efficient models for wind turbine extreme loads using inverse reliability. J. Wind. Eng. Ind. Aerodyn. 2004, 92, 789–804. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- DNV-ST-0437; Loads and Site Conditions for Wind Turbines. DNV: Oslo, Norway, 2021.
- Rosenblatt, M. Remarks on a multivariate transformation. Ann. Math. Stat. 1952, 23, 470–472. [Google Scholar] [CrossRef]
- Ditlevsen, O.; Madsen, H.O. Structural Reliability Methods; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST – User’s Guide; Technical Report NREL/EL-500-38230; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- Buhl, M.; Jonkman, J. IECWind—A Utility to Create Wind Files for InflowWind-Based Programs. 2007. Available online: https://www.nrel.gov/wind/nwtc/iecwind.html (accessed on 10 January 2023).
- Jonkman, B.J. TurbSim User’s Guide: Version 1.50; Technical Report NREL/TP-500-46198; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Madsen, H.O.; Krenk, S.; Lind, N.C. Methods of Structural Safety; Dover Publications: Mineola, NY, USA, 2006. [Google Scholar]
- Hackl, J.; Caprani, C. Pystra—Python Structural Reliability Analysis. 2022. Available online: https://pystra.github.io/pystra/index.html (accessed on 10 May 2023).
- EN 1993-1-1:2022; Eurocode 3: Design of Steel Structures—Part 1-1: General Rules and Rules for Buildings. European Committee for Standardization (CEN): Brussels, Belgium, 2022.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Failure/year | Value (m3) |
|---|---|---|
| NREL | 0.7532 | |
| EOG | 0.6340 | |
| NTM | 0.4661 | |
| iFORM | 1 | 0.4187 |
| 10 | 0.4430 | |
| 50 | 0.4587 | |
| 100 | 0.4662 |
| Var. | Distribution | Mean | Std. |
|---|---|---|---|
| Lognormal | 1.00 | 0.05 | |
| Lognormal | 386 MPa | 19.3 MPa | |
| Lognormal | 1.00 | 0.05 | |
| Lognormal | 1.00 | 0.10 | |
| Lognormal | 1.00 | 0.10 | |
| Lognormal | 1.00 | 0.05 | |
| Lognormal | 1.00 | 0.05 | |
| Lognormal | 1.00 | 0.10 | |
| Lognormal | 1.00 | 0.05 |
| Failure/year → | 1 | 10 | 50 | 100 |
|---|---|---|---|---|
| Method ↓ | ||||
| EOG | 5.37 | 4.94 | 4.62 | 4.47 |
| NTM | 3.98 | 3.40 | 2.93 | 2.70 |
| iFORM | 3.50 | 3.14 | 2.84 | 2.72 |
| Failure/yr → | 1 | 10 | 50 | 100 |
|---|---|---|---|---|
| Method ↓ | ||||
| EOG | 5.38 | 4.96 | 4.63 | 4.48 |
| NTM | 4.02 | 3.44 | 2.98 | 2.76 |
| iFORM | 3.55 | 3.19 | 2.89 | 2.76 |
| Failure/yr → | 1 | 10 | 50 | 100 |
|---|---|---|---|---|
| Method ↓ | ||||
| EOG | 5.39 | 5.07 | 4.89 | 4.83 |
| NTM | 4.02 | 3.65 | 3.46 | 3.39 |
| iFORM | 3.55 | 3.41 | 3.38 | 3.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abhinav, K.A.; Sørensen, J.D.; Hammerum, K.; Nielsen, J.S. Probabilistic Design Methods for Gust-Based Loads on Wind Turbines. Energies 2024, 17, 1518. https://doi.org/10.3390/en17071518
Abhinav KA, Sørensen JD, Hammerum K, Nielsen JS. Probabilistic Design Methods for Gust-Based Loads on Wind Turbines. Energies. 2024; 17(7):1518. https://doi.org/10.3390/en17071518
Chicago/Turabian StyleAbhinav, K. A., John D. Sørensen, Keld Hammerum, and Jannie S. Nielsen. 2024. "Probabilistic Design Methods for Gust-Based Loads on Wind Turbines" Energies 17, no. 7: 1518. https://doi.org/10.3390/en17071518
APA StyleAbhinav, K. A., Sørensen, J. D., Hammerum, K., & Nielsen, J. S. (2024). Probabilistic Design Methods for Gust-Based Loads on Wind Turbines. Energies, 17(7), 1518. https://doi.org/10.3390/en17071518