
Energy Consumption and Battery Size of Battery Trolley Electric Trucks in Surface Mines




Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Aim and Objectives
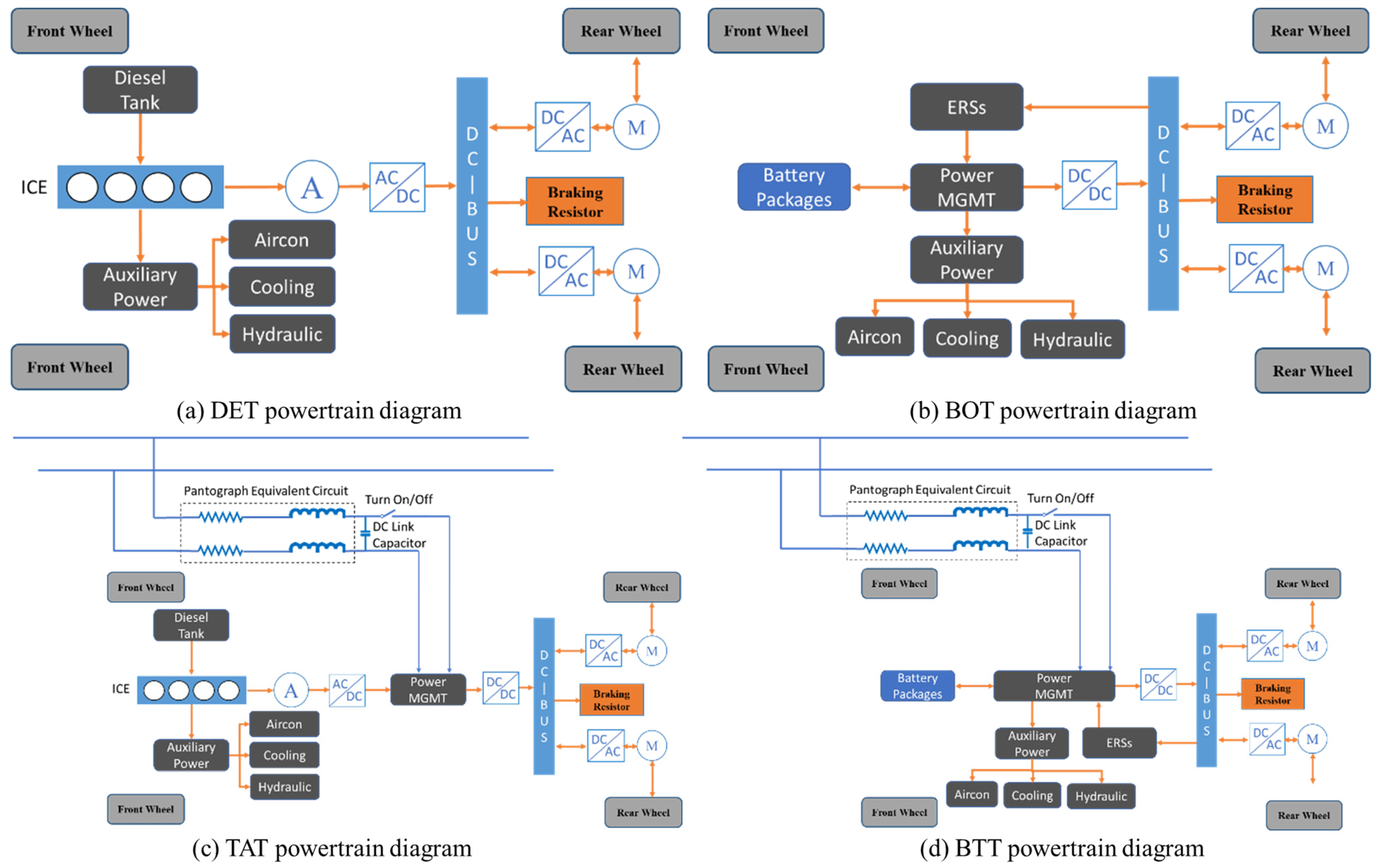
- (a)
- Diesel-electric truck,
- (b)
- Trolley Assist truck,
- (c)
- Battery-only truck,
- (d)
- Battery Trolley with dynamic charging truck, and
- (e)
- Battery Trolley with a stationary charging truck.
2. Mining Haul Truck Configurations
3. Haul Road Simulation
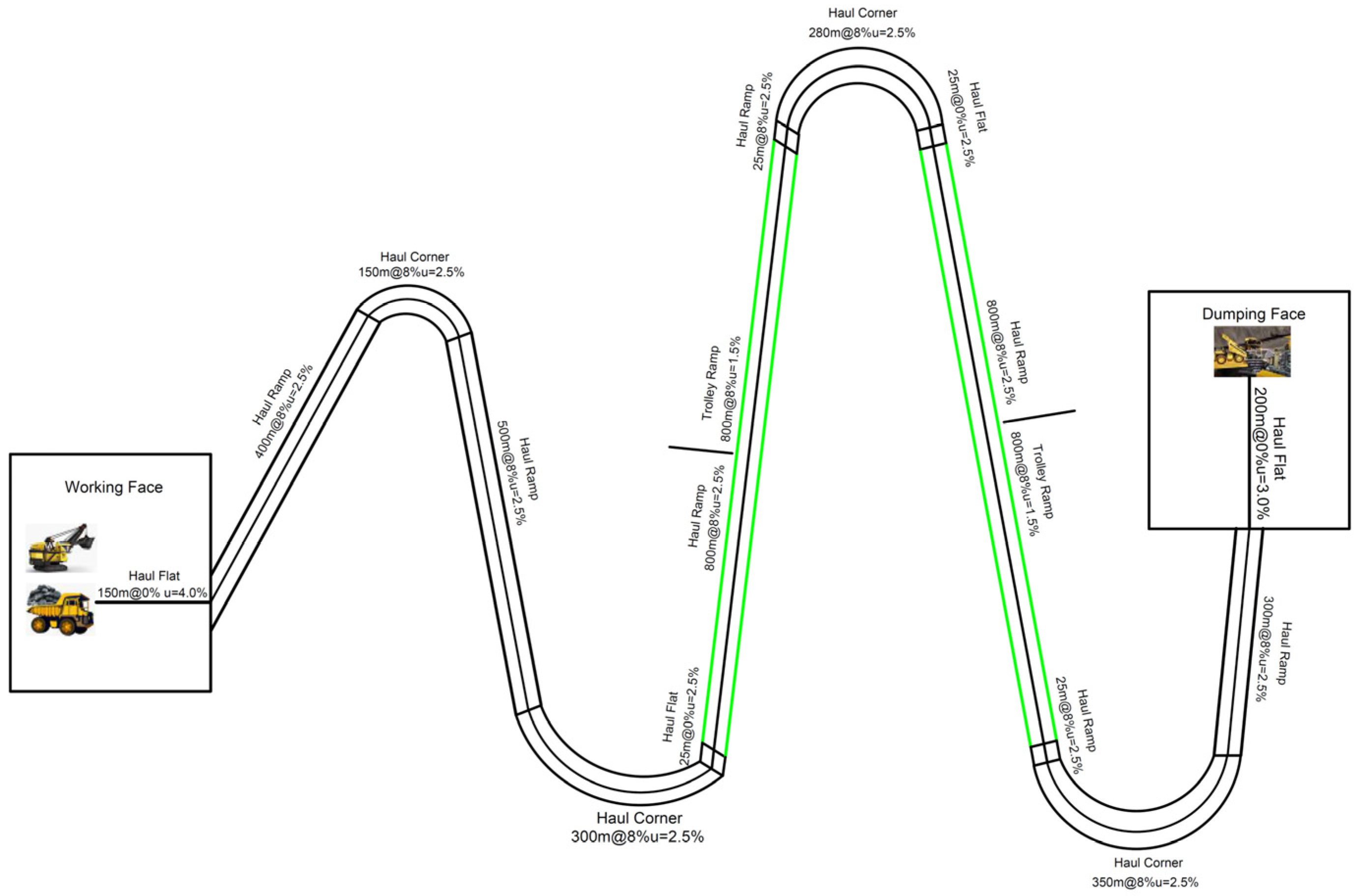
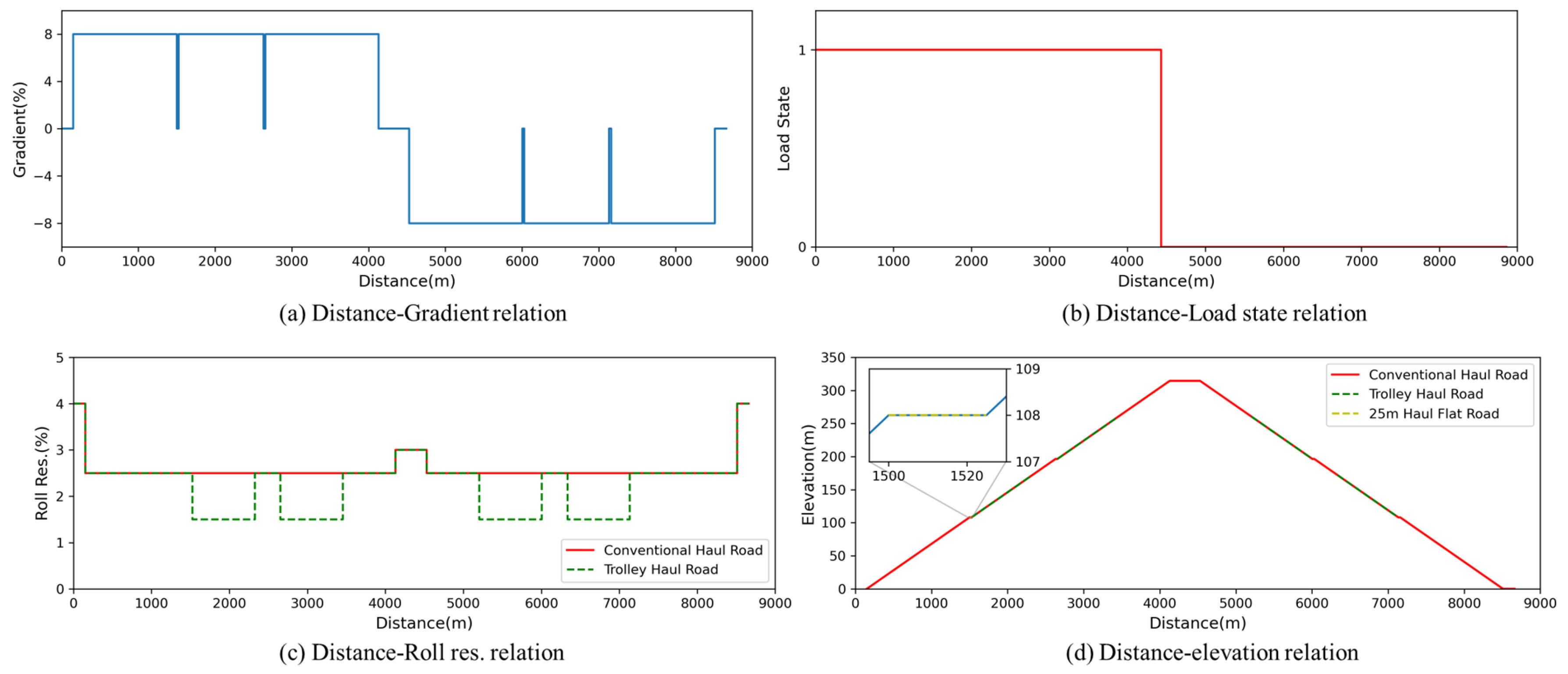
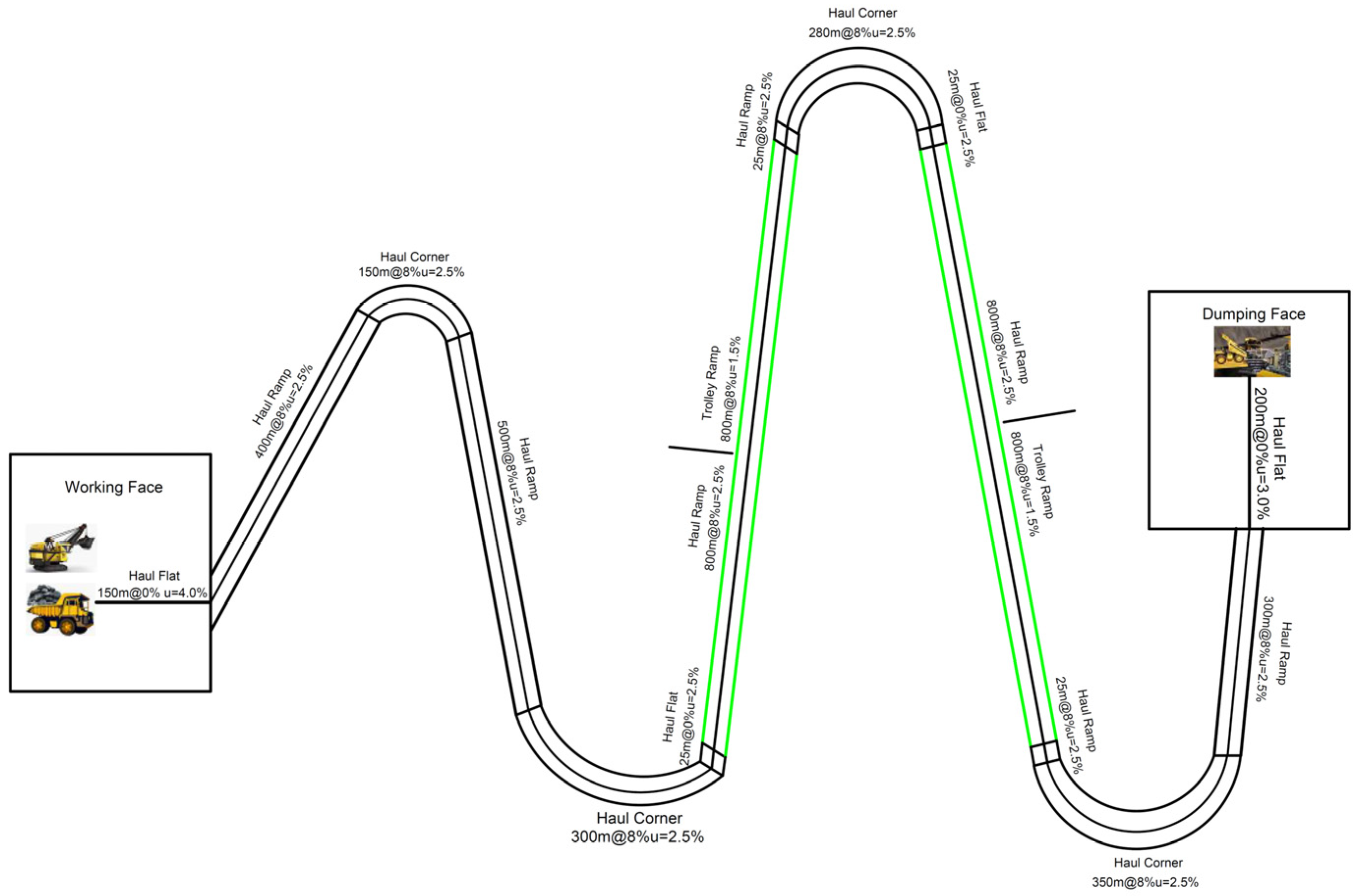
3.1. Haul Road Profiles
3.2. Simulation Assumption
- The available time, utilisation time, and operating time are the same for five truck applications.
- As this simulation focuses on the operation of a single truck rather than a fleet, it does not take into account the fleet dispatching/bunching phenomenon or the limitations of trolley capacity.
- The power provided by the trolley is ample to charge the onboard battery through dynamic charging technology. The battery can efficiently receive an adequate amount of power at a reasonable charging rate, enabling it to quickly accumulate sufficient energy within a short period of time.
- All alternatives have the same Gross Vehicle Weight (GVW) and payload during the haul cycle.
- The consideration of volume constraints within the truck to accommodate onboard energy storage is not included in the analysis.
- Stationary charging is evaluated based on the battery swapping method rather than fast charging. The battery swapping process takes 20 min and is carried out after every two cycles.
- A battery station is installed on the crest of the pit, while the SOC is set as the initial capacity level at the loading point in order to match the mining cycle for simulation.
- Generally, trolley operation has the capability to handle steeper gradients, reaching up to 10%. The uphill segment design is typically 8–12% ramp grade. 10% is the most common design in Australia. However, for the purpose of better comparison, this study has standardized the gradient at 8% for all truck alternatives to follow international practice.
- Truck performance under varying weather conditions is not taken into consideration in this study. Additionally, it should be noted that battery performance is sensitive to ambient temperature. For the purpose of the analysis, the study assumes a default ambient temperature of 25 °C [21].
3.3. Truck Performance on the Haul Road
4. Energy Consumption Analysis
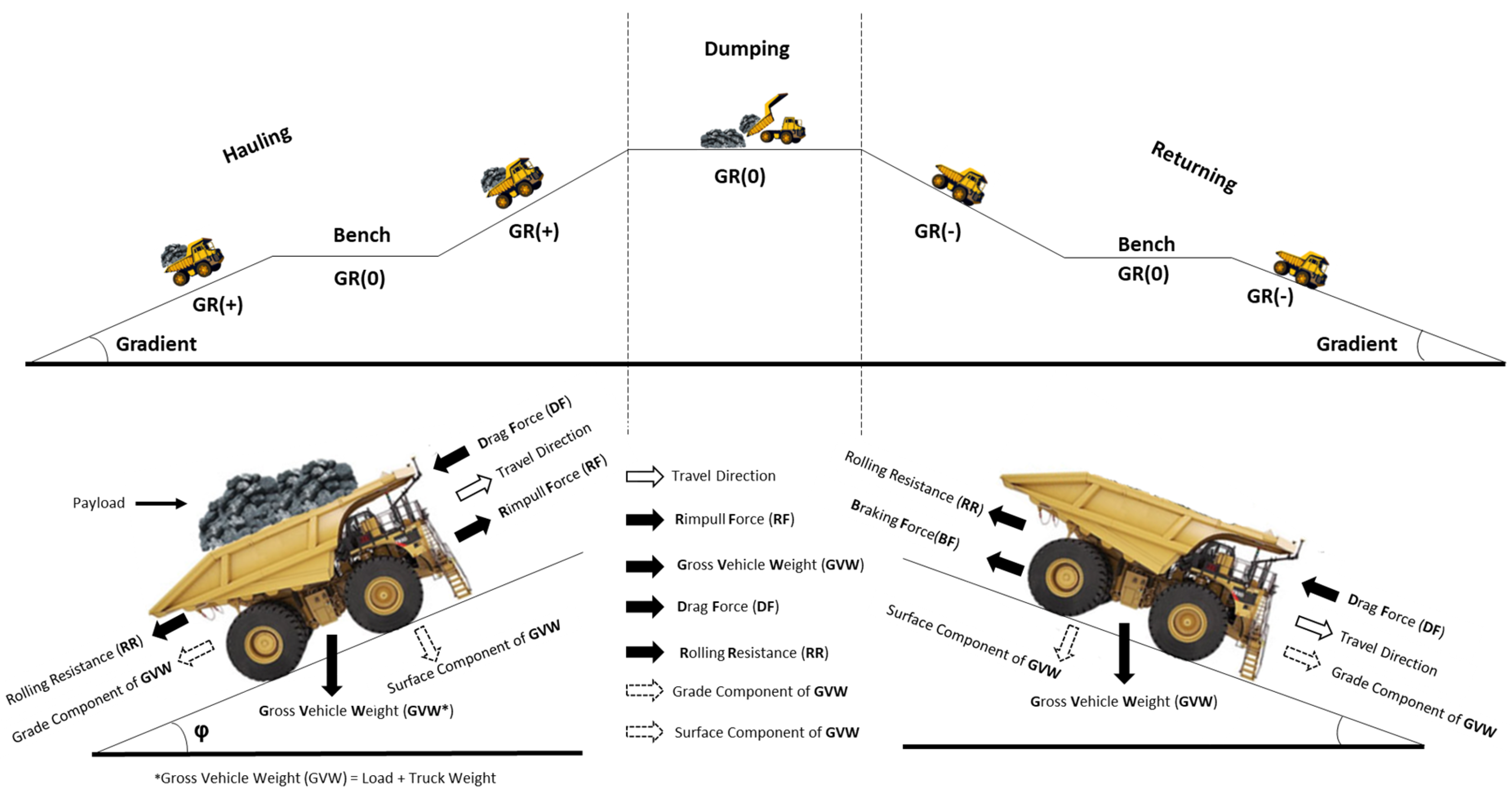
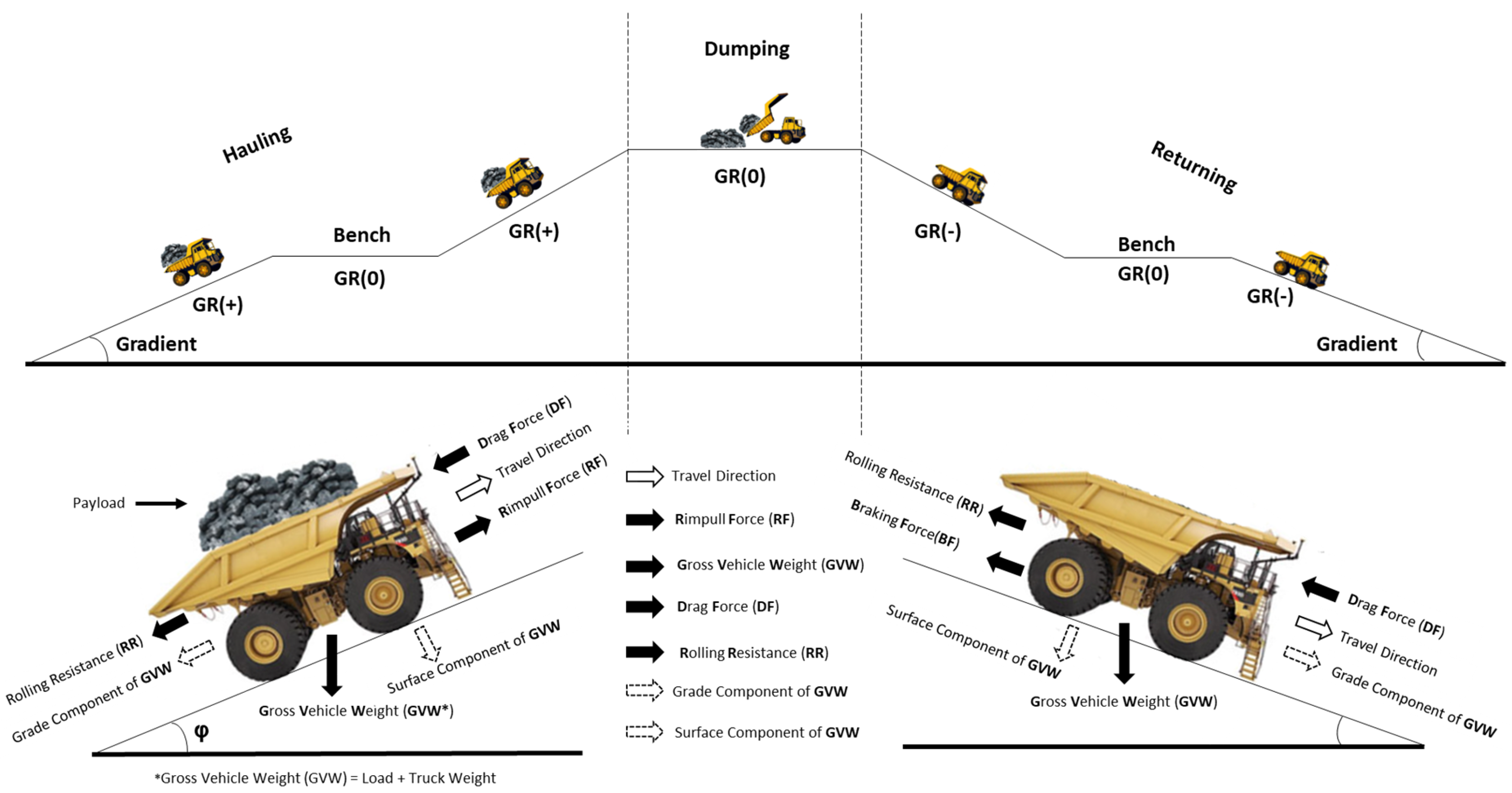
4.1. Force Parameter Analysis
- (a)
- Rolling Resistance (RR), which is the force that resists motion when the truck tyre rolls on the haul road.
- (b)
- GVW, which represents the total weight of MHT. It equals the weight of the empty vehicle plus the rated payload.
- (c)
- Rimpull Force (RF), which offers rimpull power to change the speed of a truck. It is sourced from the on-board engine.
- (d)
- Drag Force (DF), which means aerodynamic resistance, It is the force that resists air drag when the truck operates.
- (e)
- Braking Force (BF), which is the force that reduces truck speed, especially on the downhill section.
4.2. Energy Consumption Calculation
5. Battery Size Design and Comparison
5.1. Battery Material Selection
5.2. Battery Package Design
5.3. Battery Size Design and Comparison
6. Discussion
7. Conclusions
- (1)
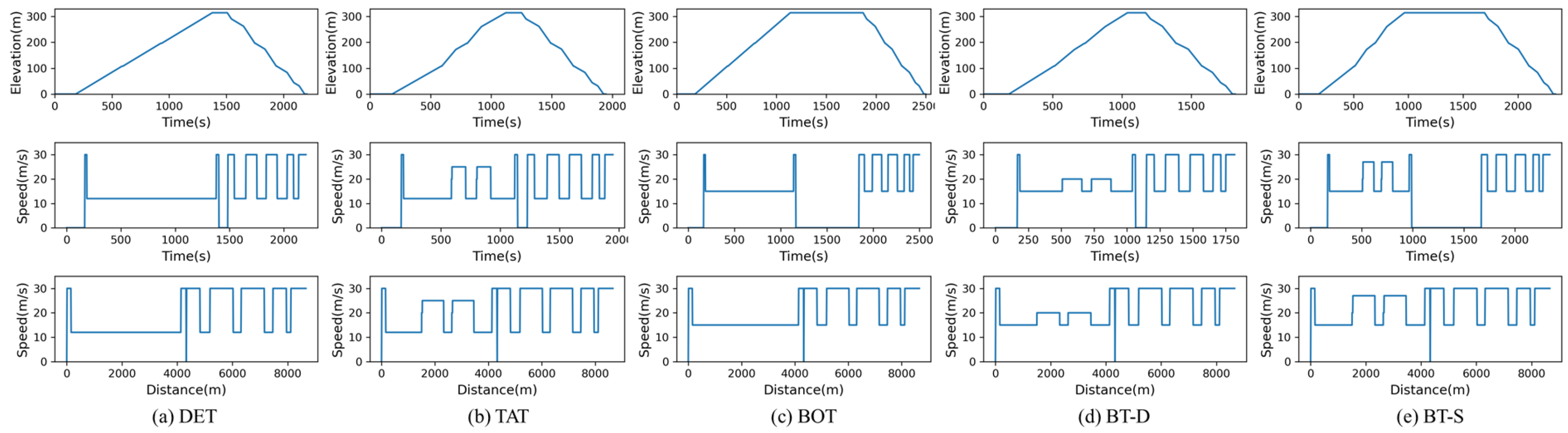
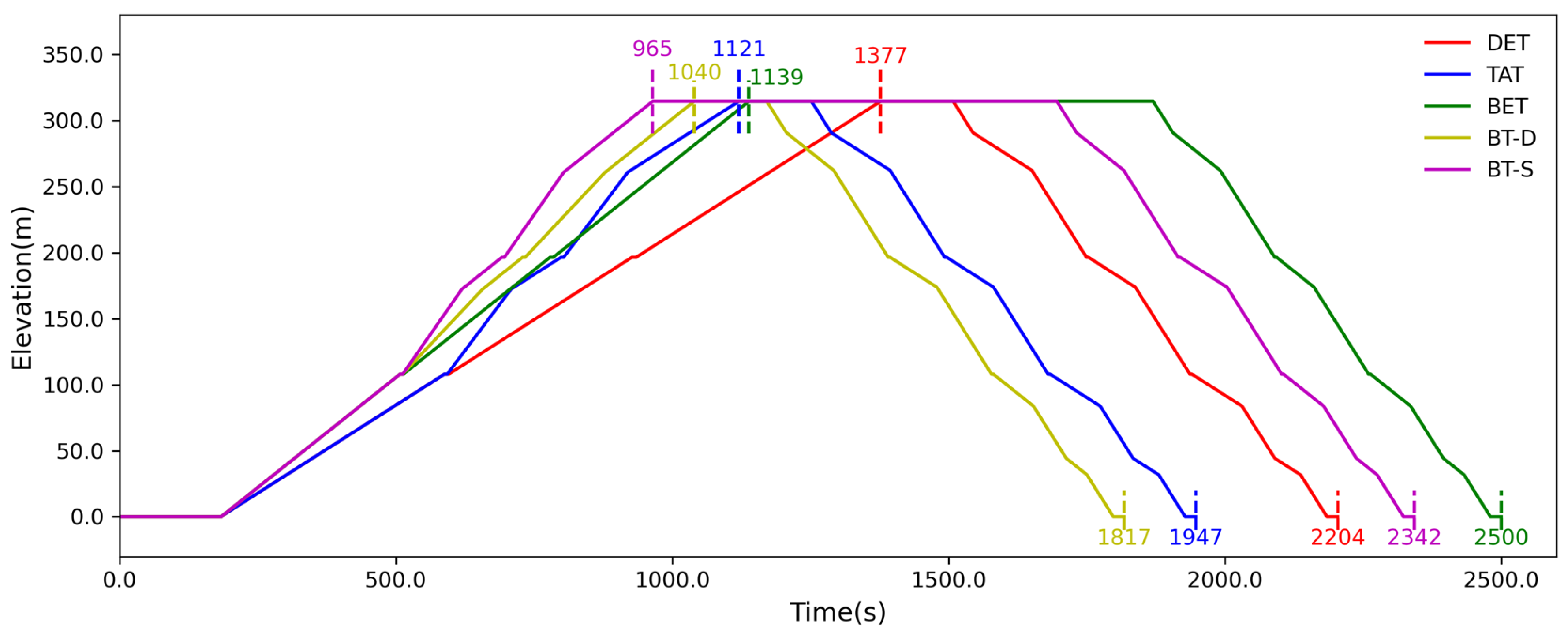
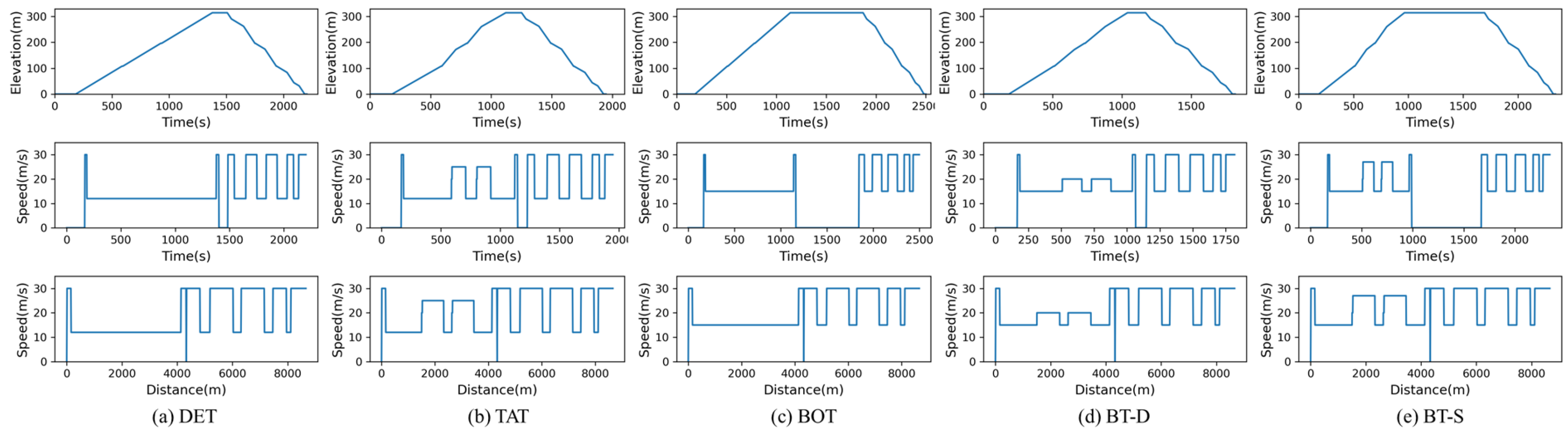
- Due to the TAT, BT-D, and BT-S configuration requirements, the haul road design should add a trolley ramp with a flat road for the accelerating truck to arrive at required the approach speed. The performance of each application is quite different: BT-S has the fastest speed (27 km/h) on the trolley ramp, while DET is the slowest (12 km/h) of the five applications. However, from the cycle time perspective, BOT needs the longest cycle time (2500 s), while its BT-D counterpart is only 1817 s due to the battery swapping operation for BOT.
- (2)
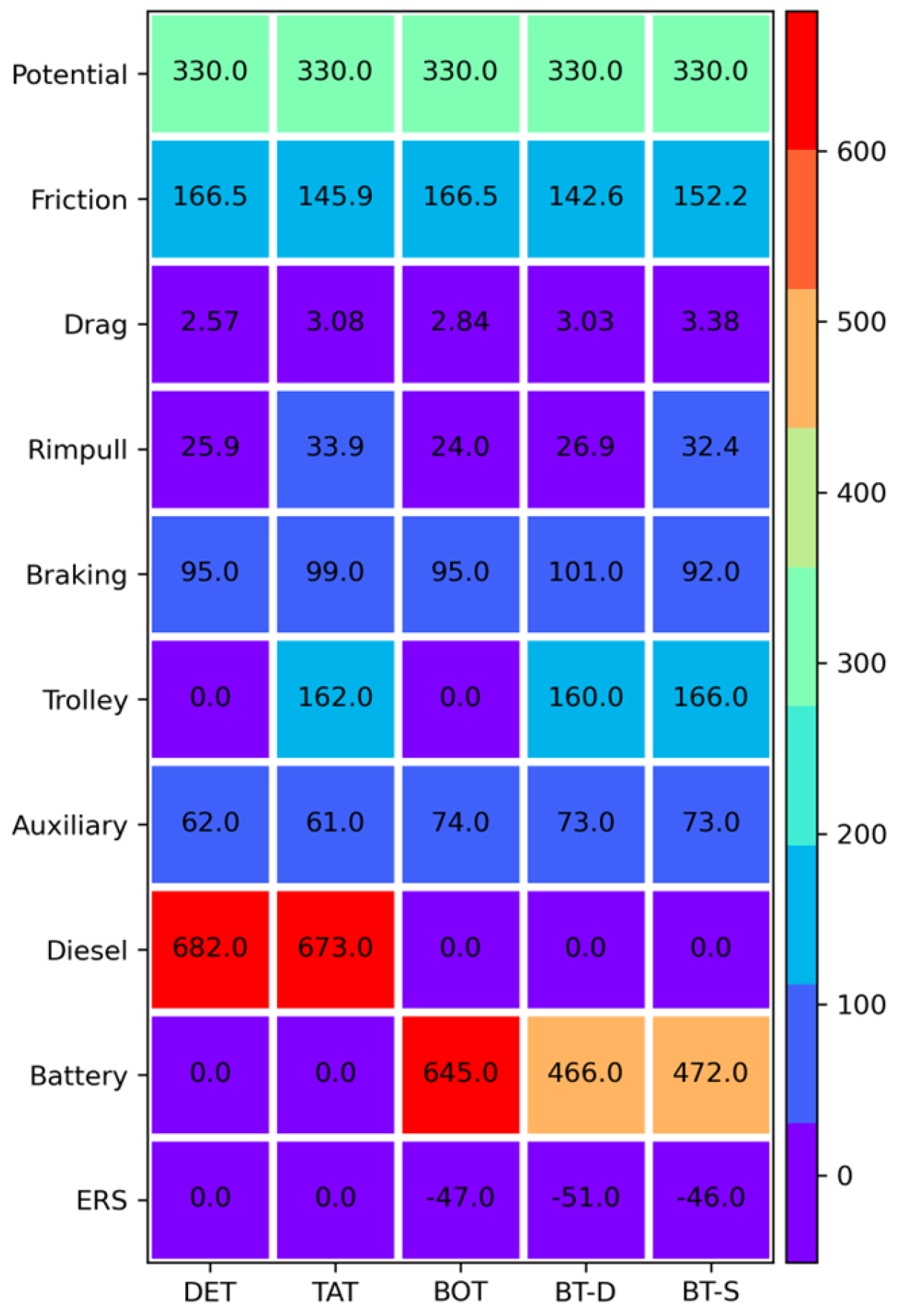
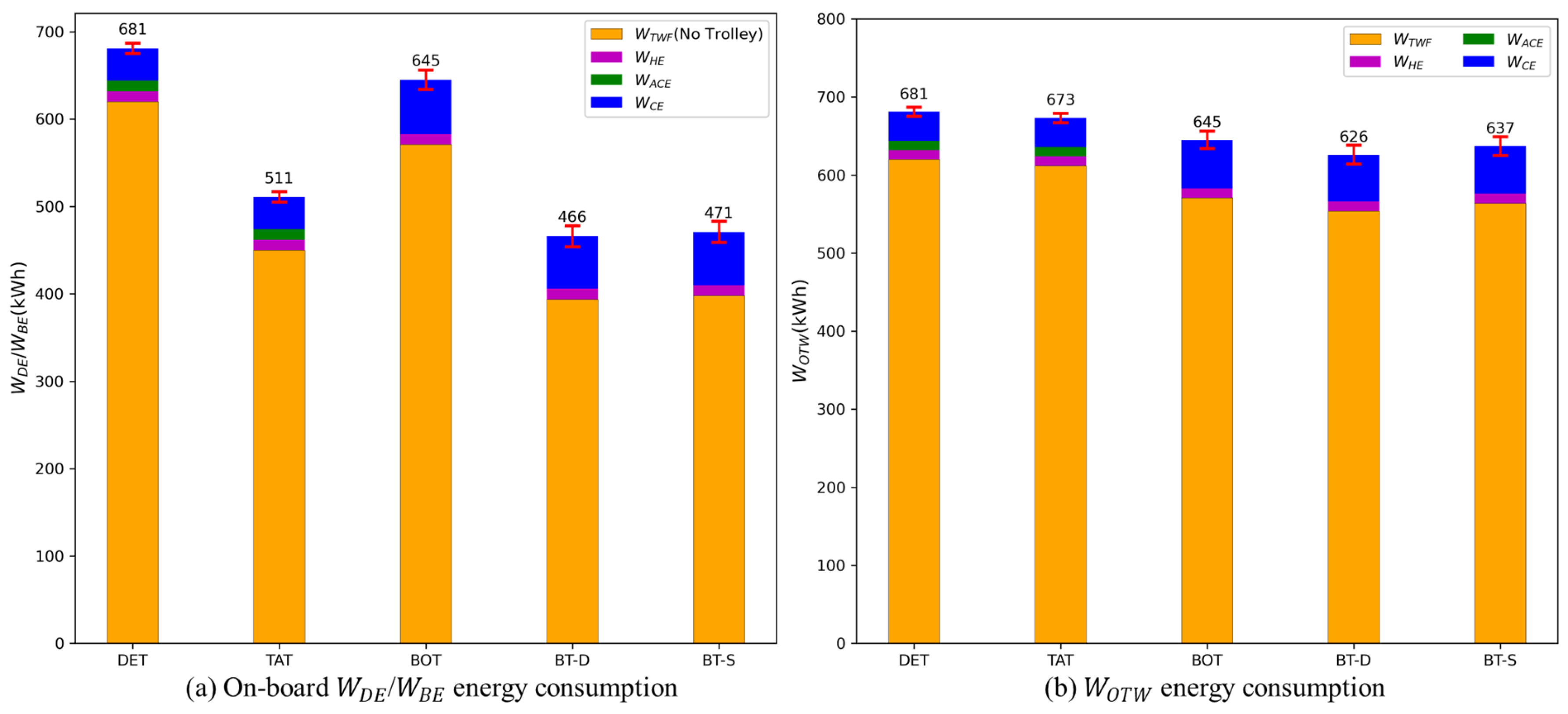
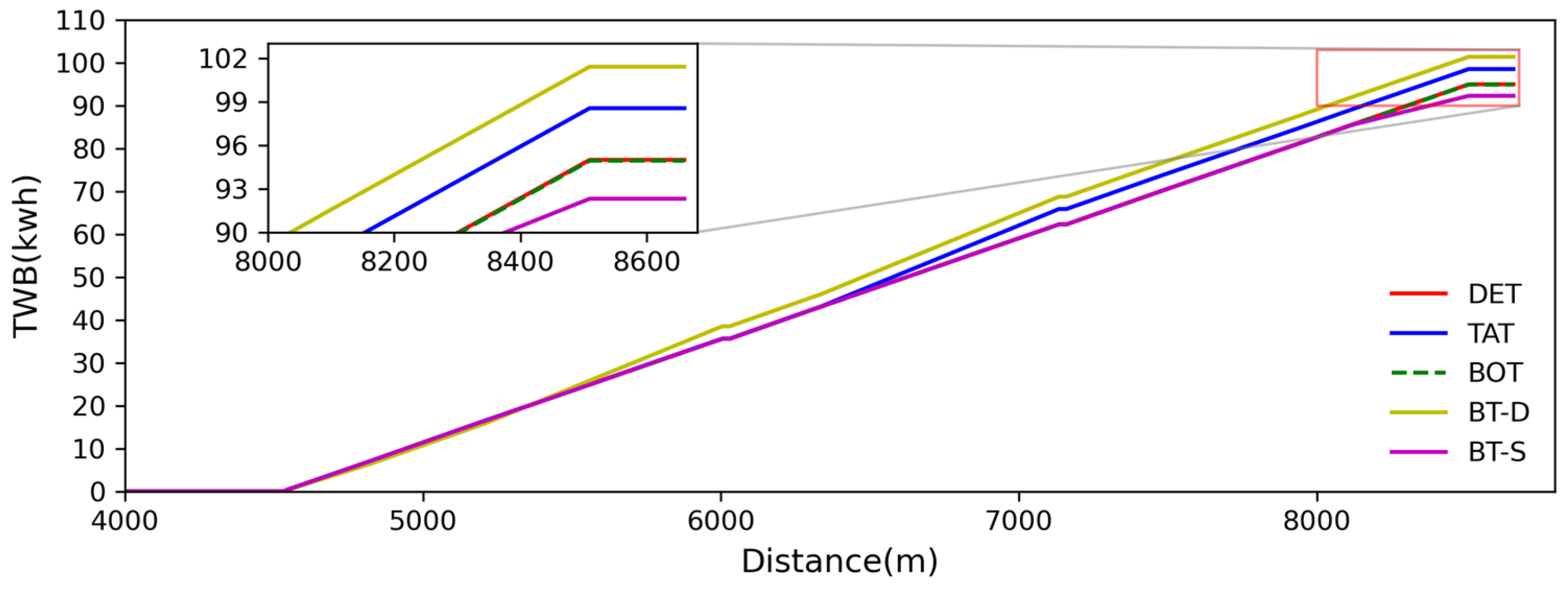
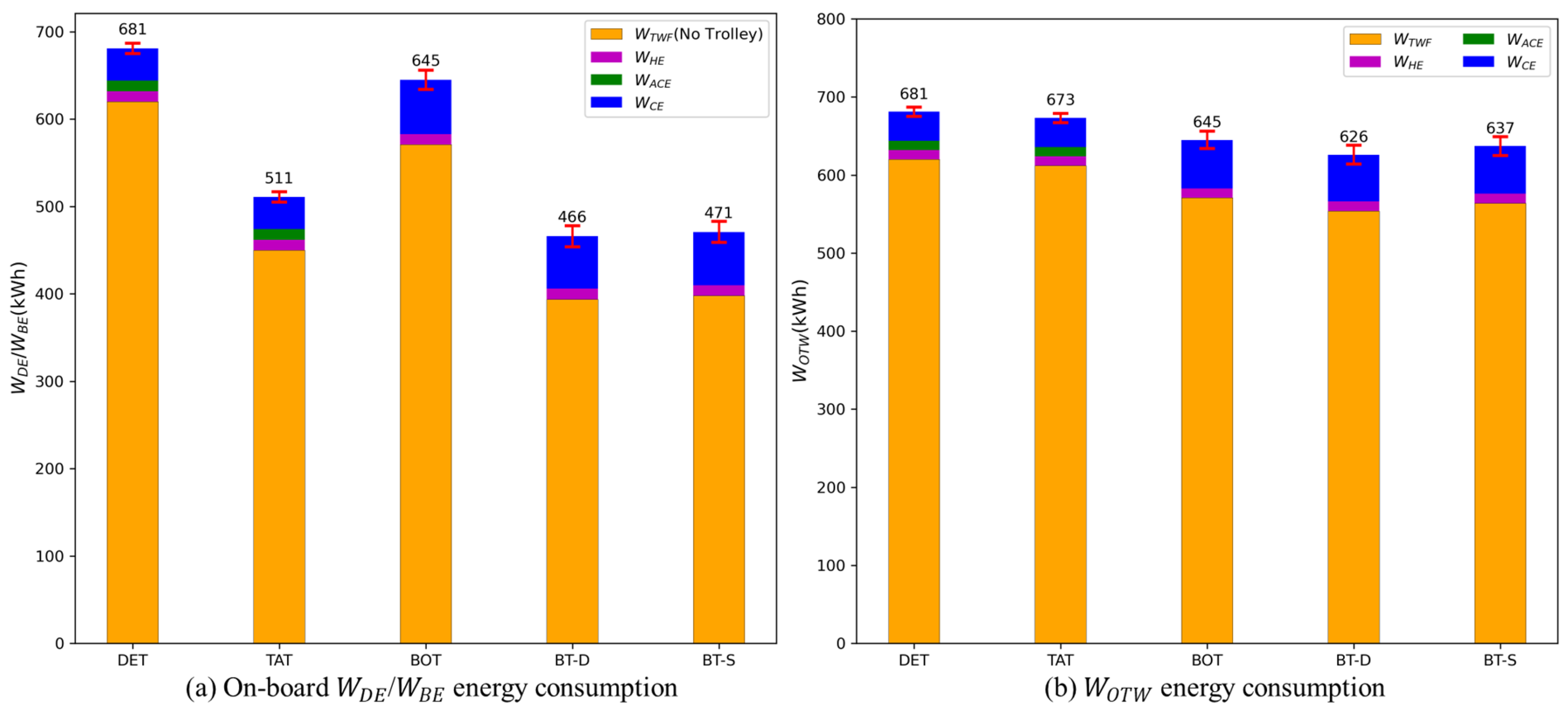
- Rolling resistance energy and gravitational potential energy are the biggest components in MHT energy consumption. Because the trolley application and ERS can effectively save energy for MHT alternatives, the total energy consumption of all applications is: DET—681 kWh; TAT—673 kWh; BOT—645 kWh; BT-S—637 kWh; BT-D—626 kWh. The on-board diesel or battery energy (excluding trolley power) required by these alternatives is DET—681 kWh; BOT—645 kWh; TAT—511 kWh; BT-S—471 kWh; BT-D—466 kWh, of which BT-D shows the best energy consumption performance.
- (3)
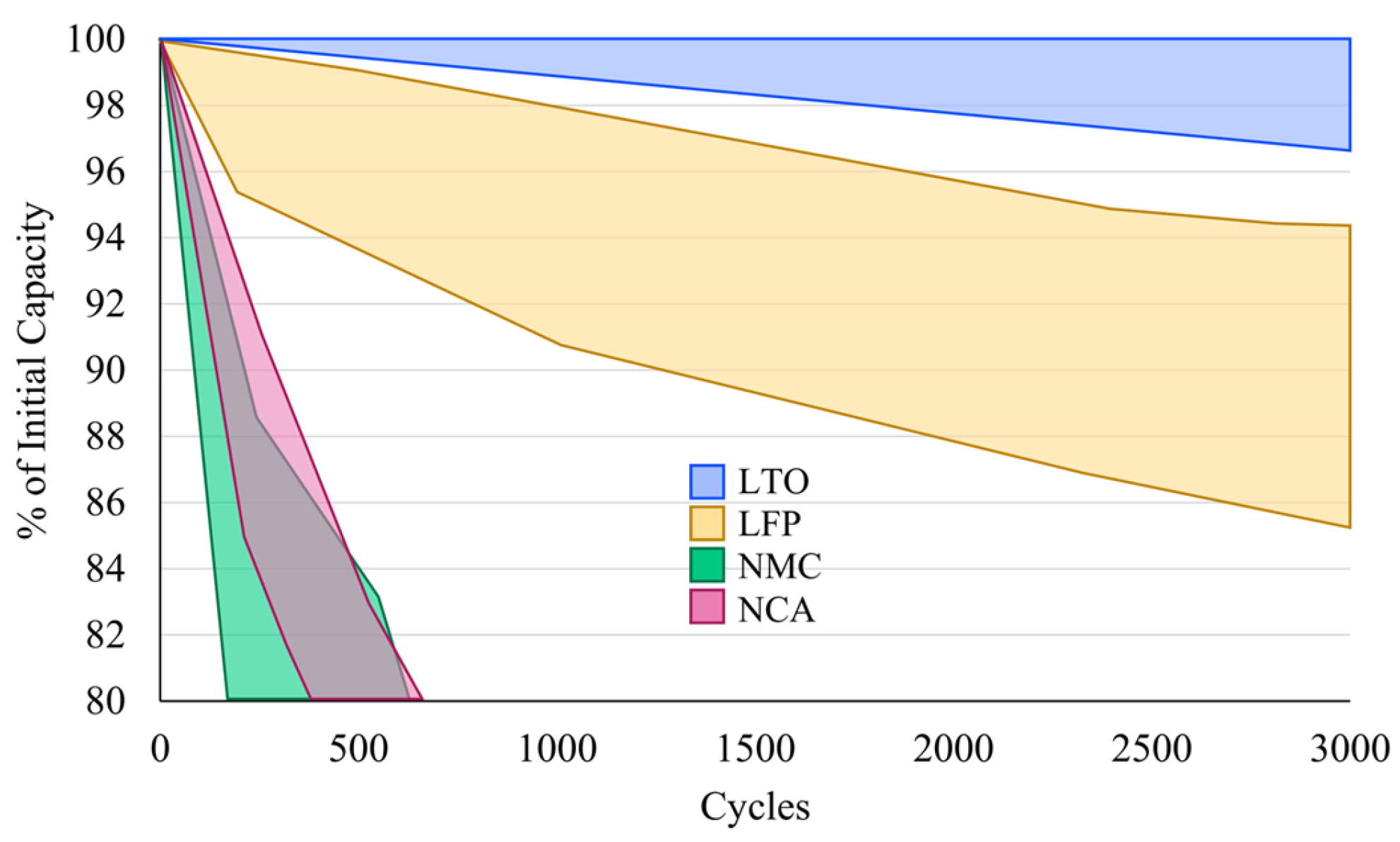
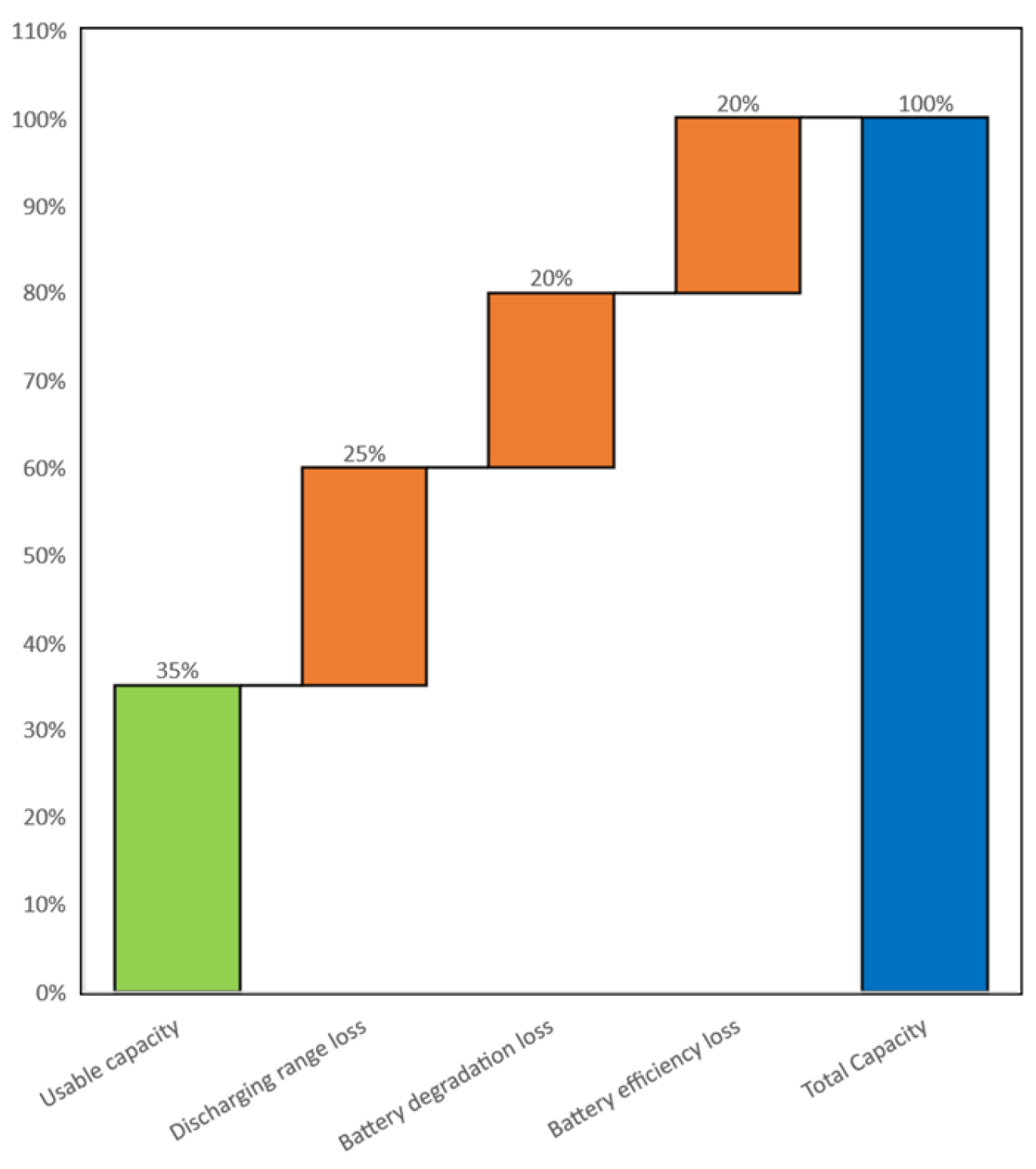
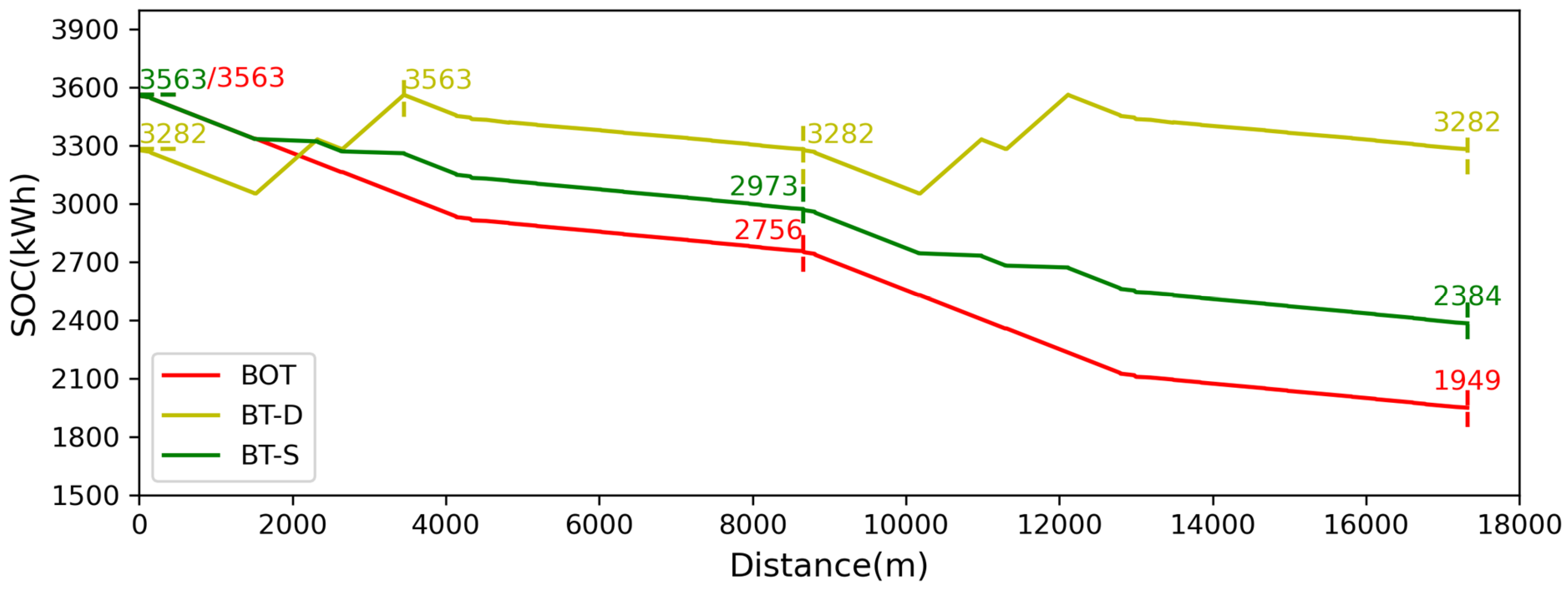
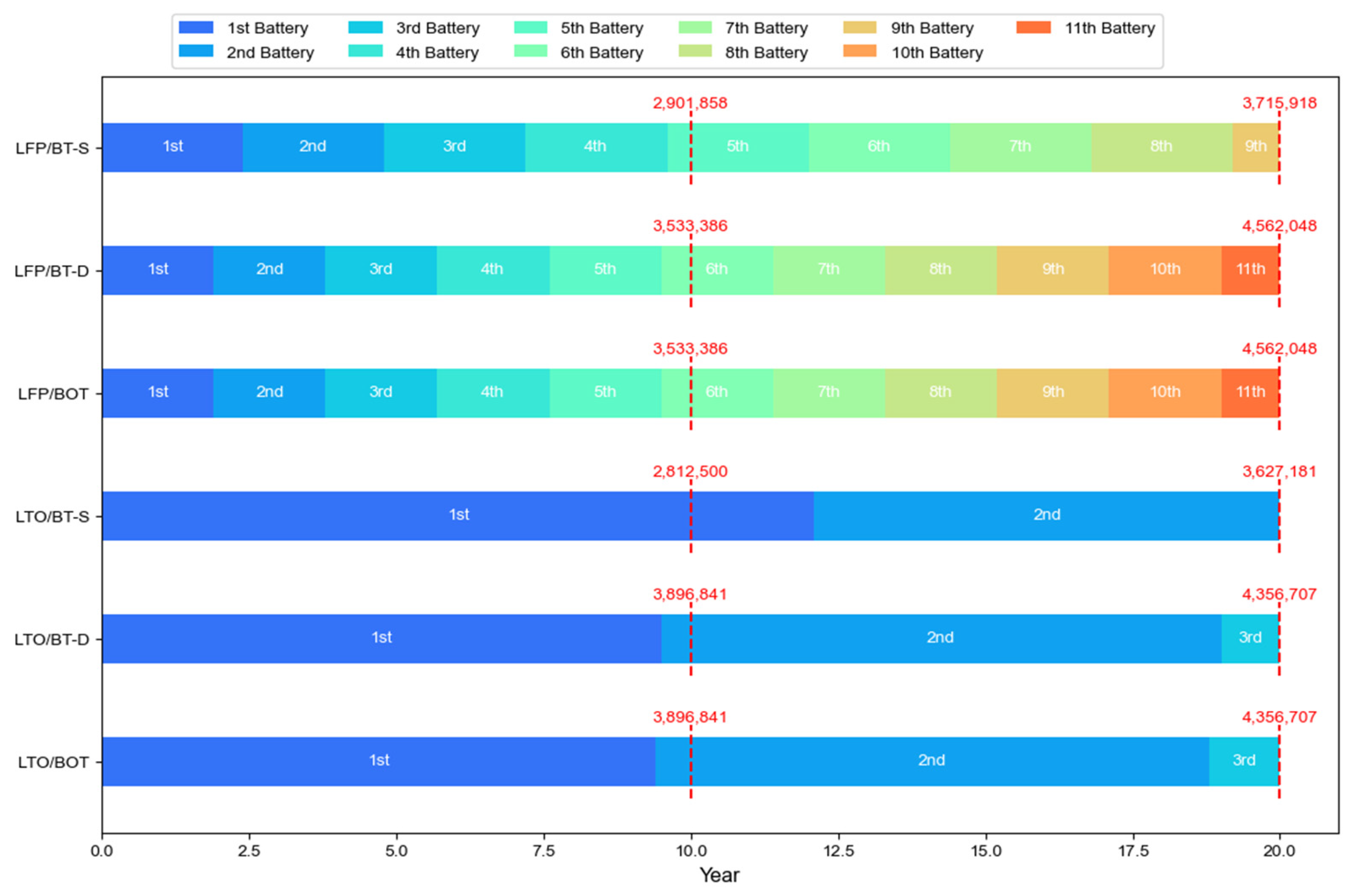
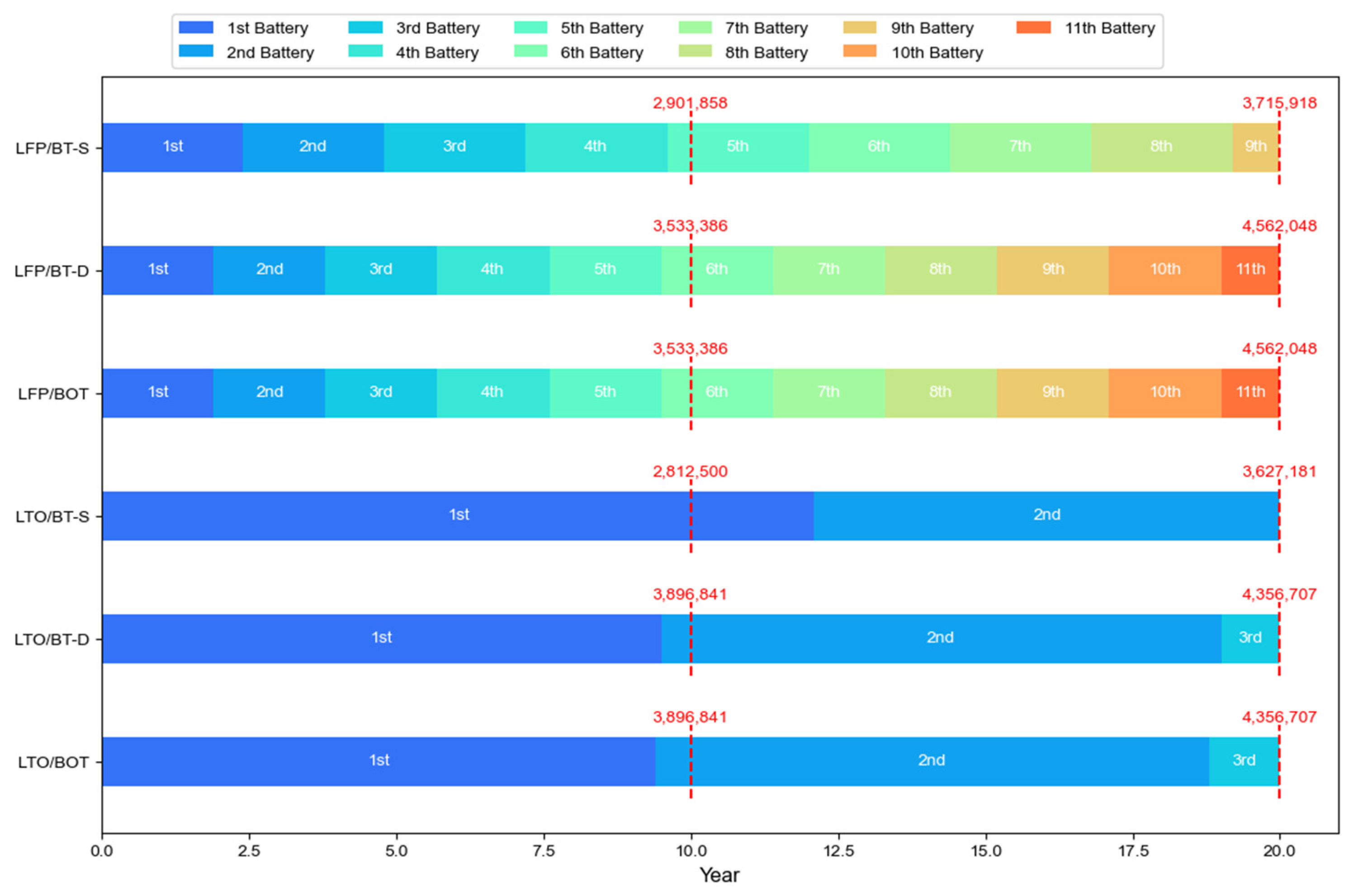
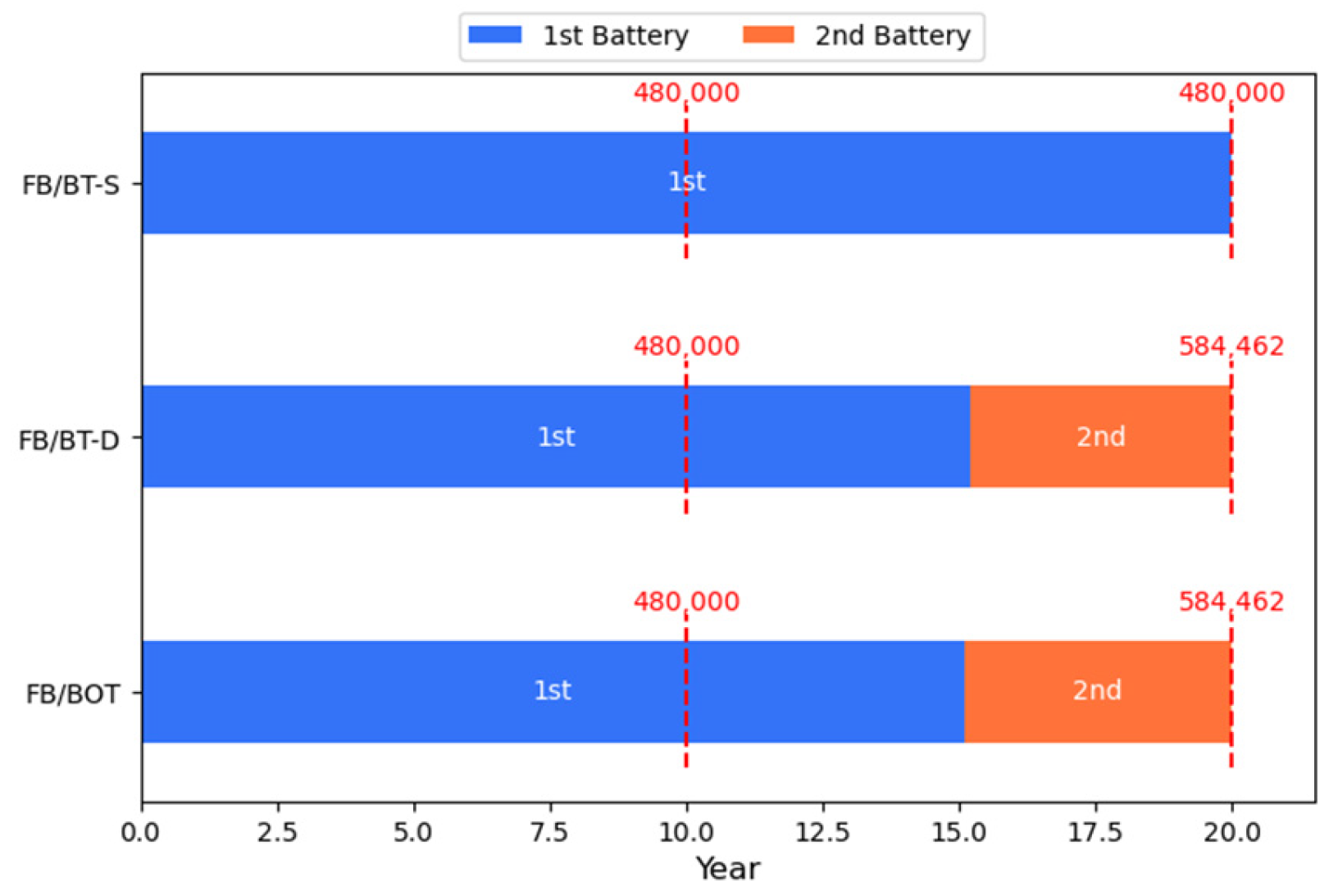
- This study selected LFP and LTO as battery sizing chemical materials due to their relatively higher cycle times, significantly longer life-spans, high energy density, and reliability in terms of efficiency, power, and safety. In regard to battery utilisation, battery package design shows only 35% of the battery “nameplate” capacity is real effective utilisation due to discharging range loss (25%), battery degradation loss (20%), and battery efficiency loss (20%). Based on tailored battery size selection, BOT, BT-D and BT-S need 25 tonnes, 18 tonnes and 18 tonnes LFP battery mass while they need 50 tonnes, 36 tonnes and 36 tonnes LTO battery mass respectively. After two haul cycle, the SOC of BOT, BT-D and BT-S is 1949 kWh, 2284 kWh and 1386 kWh, respectively. Based on unified battery size selection, BOT, BT-D, and BT-S need 25 t LFP battery mass, while they need 50 t LTO battery mass, respectively. After two haul cycles, the SOC of BOT, BT-D, and BT-S is 1949 kWh, 3282 kWh, and 2384 kWh. The resulting NPV of costs for different applications over 20 years is USD 3.7 M, USD 4.6 M, USD 4.6 M, USD 3.6 M, USD 4.4 M, and USD 4.4 M for LFP/BT-S, LFP/BT-D, LFP/BOT, LTO/BT-S, LTO/BT-D, and LTO/BOT, respectively. BT-S shows a significant advantage in on-board battery cost, taking into consideration an over hundred truck fleet in a big surface mine. The cost savings will be increased when the battery exchange expenditure is accounted.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Declaration
Abbreviations
| AE | Auxiliary energy |
| ACE | Air conditioner energy |
| BOT | Battery-only truck |
| BT-D | Battery Trolley-dynamic |
| BT-S | Battery Trolley-stationary |
| BEVs | Battery electric vehicles |
| BT | Battery Trolley |
| BTT | Battery Trolley truck |
| BF | Braking force |
| BE | Battery energy |
| CO2 | Carbon dioxide |
| CE | Cooling energy |
| DET | Diesel-electric truck |
| DE | Diesel energy |
| DPM | Diesel particulate matter |
| DP | Dynamic programming |
| DF | Drag force |
| DOD | Depth-of-discharge |
| EMS | Energy management strategies |
| ESS | Energy storage system |
| ERS | Energy recovery system |
| FB | Future battery |
| GHG | Greenhouse gas |
| GVW | Gross vehicle weight |
| HDV | Heavy-duty vehicle |
| HE | Hydraulic energy |
| ICE | Internal combustion engine |
| LFP | LiFePO4 |
| LTO | Lithium titanium oxide |
| LIBs | Lithium-ion batteries |
| ML | Machine learning |
| MHT | Mining haulage truck |
| NPV | Net present value |
| RR | Rolling resistance |
| RF | Rimpull force |
| SIMS | Sustainable Intelligent Mining System |
| SOC | State of charging |
| SOH | State-of-health |
| TAT | Trolley Assist truck |
| TA | Trolley Assist |
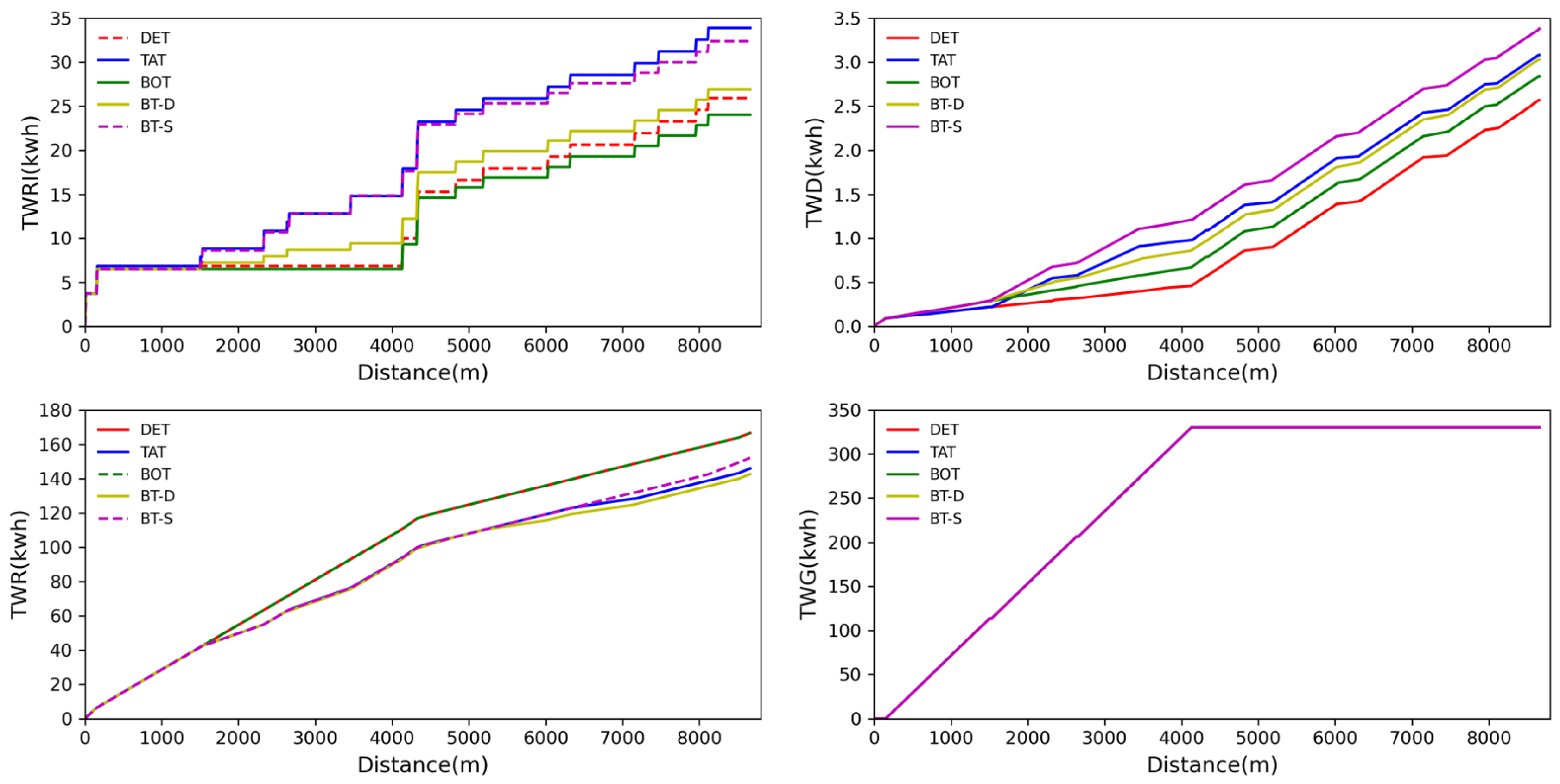
| TWRI | Total work of the rimpull |
| TWD | Total work of drag |
| TWR | Total work of rolling resistance |
| TWG | Total work of gravity |
| TWF | Total work of force |
| OTW | Overall total energy |
| NMC | Lithium nickel manganese cobalt oxide |
| NCA | Lithium nickel cobalt aluminium oxide |
References
- Igogo, T.; Awuah-Offei, K.; Newman, A.; Lowder, T.; Engel-Cox, J. Integrating renewable energy into mining operations: Opportunities, challenges, and enabling approaches. Appl. Energy 2021, 300, 117375. [Google Scholar] [CrossRef]
- Feng, Y.; Liu, Q.; Li, Y.; Yang, J.; Dong, Z. Energy efficiency and CO2 emission comparison of alternative powertrain solutions for mining haul truck using integrated design and control optimization. J. Clean. Prod. 2022, 370, 133568. [Google Scholar] [CrossRef]
- Li, J.; Wu, X.; Xu, M.; Liu, Y. A real-time optimization energy management of range extended electric vehicles for battery lifetime and energy consumption. J. Power Sources 2021, 498, 229939. [Google Scholar] [CrossRef]
- Feng, Y.; Dong, Z. Optimal energy management with balanced fuel economy and battery life for large hybrid electric mining truck. J. Power Sources 2020, 454, 227948. [Google Scholar] [CrossRef]
- Kalantari, H.; Sasmito, A.P.; Ghoreishi-Madiseh, S.A. An overview of directions for decarbonization of energy systems in cold climate remote mines. Renew. Sustain. Energy Rev. 2021, 152, 111711. [Google Scholar] [CrossRef]
- Shi, S.; Zhang, H.; Yang, W.; Zhang, Q.; Wang, X. A life-cycle assessment of battery electric and internal combustion engine vehicles: A case in Hebei Province, China. J. Clean. Prod. 2019, 228, 606–618. [Google Scholar] [CrossRef]
- Feng, Y.; Dong, Z. Integrated design and control optimization of fuel cell hybrid mining truck with minimized lifecycle cost. Appl. Energy 2020, 270, 115164. [Google Scholar] [CrossRef]
- Knibbe, R.; Harding, D.; Cooper, E.; Burton, J.; Liu, S.; Amirzadeh, Z.; Buckley, R.; Meehan, P.A. Application and limitations of batteries and hydrogen in heavy haul rail using Australian case studies. J. Energy Storage 2022, 56, 105813. [Google Scholar] [CrossRef]
- Ritter, A.; Elbert, P.; Onder, C. Energy Saving Potential of a Battery-Assisted Fleet of Trolley Buses. IFAC-PapersOnLine 2016, 49, 377–384. [Google Scholar] [CrossRef]
- Ertugrul, N.; Kani, A.P.; Davies, M.; Sbarbaro, D.; Moran, L. Status of Mine Electrification and Future Potentials. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 151–156. [Google Scholar] [CrossRef]
- Xie, S.; Zhang, Q.; Hu, X.; Liu, Y.; Lin, X. Battery sizing for plug-in hybrid electric buses considering variable route lengths. Energy 2021, 226, 120368. [Google Scholar] [CrossRef]
- Cunanan, C.; Tran, M.-K.; Lee, Y.; Kwok, S.; Leung, V.; Fowler, M. A Review of Heavy-Duty Vehicle Powertrain Technologies: Diesel Engine Vehicles, Battery Electric Vehicles, and Hydrogen Fuel Cell Electric Vehicles. Clean Technol. 2021, 3, 474–489. [Google Scholar] [CrossRef]
- Mareev, I.; Sauer, D. Energy Consumption and Life Cycle Costs of Overhead Catenary Heavy-Duty Trucks for Long-Haul Transportation. Energies 2018, 11, 3446. [Google Scholar] [CrossRef]
- Halim, A.; Lööw, J.; Johansson, J.; Gustafsson, J.; Van Wageningen, A.; Kocsis, K. Improvement of Working Conditions and Opinions of Mine Workers When Battery Electric Vehicles (BEVs) Are Used Instead of Diesel Machines—Results of Field Trial at the Kittilä Mine, Finland. Min. Metall. Explor. 2022, 39, 203–219. [Google Scholar] [CrossRef]
- Mazumdar, J. Performance improvement of mining haul trucks operating on trolley systems. In Proceedings of the 2011 IEEE Industry Applications Society Annual Meeting, Orlando, FL, USA, 9–13 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Cruzat, J.V.; Valenzuela, M.A. Modeling and Evaluation of Benefits of Trolley Assist System for Mining Trucks. IEEE Trans. Ind. Appl. 2018, 54, 3971–3981. [Google Scholar] [CrossRef]
- Lindgren, L.; Grauers, A.; Ranggård, J.; Mäki, R. Drive-Cycle Simulations of Battery-Electric Large Haul Trucks for Open-Pit Mining with Electric Roads. Energies 2022, 15, 4871. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Liu, K.; Quan, Z.; Li, Y. Battery-Involved Energy Management for Hybrid Electric Bus Based on Expert-Assistance Deep Deterministic Policy Gradient Algorithm. IEEE Trans. Veh. Technol. 2020, 69, 12786–12796. [Google Scholar] [CrossRef]
- Mareev, I.; Becker, J.; Sauer, D. Battery Dimensioning and Life Cycle Costs Analysis for a Heavy-Duty Truck Considering the Requirements of Long-Haul Transportation. Energies 2017, 11, 55. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Zhang, Q.; Lin, X.; Mu, B.; Ji, H. Aging-aware co-optimization of battery size, depth of discharge, and energy management for plug-in hybrid electric vehicles. J. Power Sources 2020, 450, 227638. [Google Scholar] [CrossRef]
- Terblanche, P.J.; Kearney, M.P.; Knights, P.F. Potential of on-board energy recovery systems to reduce the costs of diesel–electric mine truck haulage. Min. Technol. 2018, 127, 195–208. [Google Scholar] [CrossRef]
- Mazumdar, J. All electric operation of ultraclass mining haul trucks. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Bao, H.; Knights, P.; Kizil, M.; Nehring, M. Electrification Alternatives for Open Pit Mine Haulage. Mining 2023, 3, 1–25. [Google Scholar] [CrossRef]
- Marsden, O.W.; Marsden, J.O. Potential Pathways for Mining Operations to Transition to Renewable Energy—A Case Study. Min. Metall. Explor. 2021, 38, 1689–1699. [Google Scholar] [CrossRef]
- Bao, H.; Knights, P.; Kizil, M.; Nehring, M. Productivity estimation of battery trolley mining truck fleets. Int. J. Min. Reclam. Environ. 2023, 38, 144–166. [Google Scholar] [CrossRef]
- Power Sonic. Available online: https://www.power-sonic.com/blog/what-is-a-battery-c-rating/ (accessed on 1 October 2023).
- Awuah-Offei, K. (Ed.) Energy Efficiency in the Minerals Industry. In Green Energy and Technology; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Moore, P. Surface Mining Trucks. Int. Min. 2022, 17, 50–67. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | DET | TAT | BOT | BT-D | BT-S |
|---|---|---|---|---|---|
| Minimum speed (km/h) | 12 | 12 | 15 | 15 | 15 |
| Maximum speed (km/h) | 30 | 30 | 30 | 30 | 30 |
| Haul ramp speed (km/h) | 12 [17] | 25 [16] | 15 [17] | 20 [17] | 27 [17] |
| Battery swapping time (s) | - | - | 600 | - | 600 |
| Cycle time (s) | 2204 | 1947 | 2500 | 1817 | 2342 |
| Parameters | Values |
|---|---|
| Discharging range | 20–95% |
| Battery degradation | 20% |
| Battery efficiency | 80% |
| LFP energy density (Wh/kg) | 150 |
| LTO energy density (Wh/kg) | 75 |
| LFP cycle number | 4000 |
| LTO cycle number | 20,000 |
| LFP cost (USD/kWh) | 240 |
| LTO cost (USD/kWh) | 750 |
| Applications | Rated LFP Mass (tonne) | Rated LTO Mass (tonne) | Rated on-Board Energy (kWh) |
|---|---|---|---|
| BOT | 25 | 50 | 3750 |
| BT-D | 18 | 36 | 2700 |
| BT-S | 18 | 36 | 2700 |
| Applications | Rated LFP Mass (tonne) | Rated LTO Mass (tonne) | Rated on-Board Energy (kWh) |
|---|---|---|---|
| BOT | 32 | 50 | 3750 |
| BT-D | 32 | 50 | 3750 |
| BT-S | 32 | 50 | 3750 |
| Parameter | Value |
|---|---|
| Battery energy density (Wh/kg) | 500 |
| Battery cycle number | 30,000 |
| Battery cost (USD/kWh) | 120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, H.; Knights, P.; Kizil, M.; Nehring, M. Energy Consumption and Battery Size of Battery Trolley Electric Trucks in Surface Mines. Energies 2024, 17, 1494. https://doi.org/10.3390/en17061494
Bao H, Knights P, Kizil M, Nehring M. Energy Consumption and Battery Size of Battery Trolley Electric Trucks in Surface Mines. Energies. 2024; 17(6):1494. https://doi.org/10.3390/en17061494
Chicago/Turabian StyleBao, Haiming, Peter Knights, Mehmet Kizil, and Micah Nehring. 2024. "Energy Consumption and Battery Size of Battery Trolley Electric Trucks in Surface Mines" Energies 17, no. 6: 1494. https://doi.org/10.3390/en17061494
APA StyleBao, H., Knights, P., Kizil, M., & Nehring, M. (2024). Energy Consumption and Battery Size of Battery Trolley Electric Trucks in Surface Mines. Energies, 17(6), 1494. https://doi.org/10.3390/en17061494