1. Introduction
In the context of the rapid development of new energy sources [
1,
2,
3,
4], direct current (DC) transmission technology offers advantages of lower power losses compared to alternating current (AC) transmission [
5,
6]. Moreover, it presents broader prospects for application in long-distance power transmission and asynchronous grid interconnection [
7,
8].
Internationally, there are numerous demonstration projects for DC transmission systems. For instance, the Yubei-Ezhou Flexible DC Back-to-Back Transmission Project [
9] (referred to as the “Yubei-Ezhou Project”) stands as the pioneering flexible DC transmission endeavor with the highest voltage level and maximum transmission capacity, rated at 5000 MW, with a nominal voltage of ±420 kV.
The widespread implementation of DC transmission projects has led to the occurrence of some ultra-low-frequency oscillations in practical power grids in recent years [
10] (oscillations with frequencies lower than 0.1 Hz). Based on these occurrences, researchers [
11] conducted an analysis focusing on the frequency, damping, and manifestations of ultra-low-frequency oscillations within the context of single-machine and single-load systems. The findings highlighted significant distinctions between ultra-low-frequency oscillations and conventional frequency stability issues. The manifestations of these frequency oscillations do not exhibit relative oscillations between generator rotors; instead, they represent oscillations in the overall network frequency. Therefore, they differ from traditional low-frequency oscillations in power systems.
Presently, scholars have introduced several studies; for instance, the literature [
12] has proposed a DC frequency control system, employing multivariable control in the frequency regulation of DC systems. This allows for a better adjustment of the frequency of AC systems while ensuring the stability of both AC systems. Additionally, some researchers have conducted an analysis of the speed governor models of hydroelectric units, identifying them as the primary factors contributing to the occurrence of ultra-low-frequency oscillations [
13]. The literature [
14] has presented a method applicable for ultra-low-frequency oscillation analysis in multi-machine systems through single-machine equivalencing. In another context, researchers [
15] elucidated the impact of DC frequency regulation on enhancing the frequency stability in the Yunnan power grid after asynchronous operation, analyzing factors such as the adjustment range and dead-band setting of DC frequency regulation on AC system frequency stability. Furthermore, based on the ChuSui and PuQiao Ultra High Voltage Direct Current (UHVDC) island operation test, researchers [
16] analyzed the ultra-low-frequency oscillation mechanism under isolated island condition based on the operation test of Chusui and Puqiao UHVDC islands, and proposed frequency stabilization measures for hydropower units to coordinate DC frequency modulation.
Regarding measures to suppress ultra-low-frequency oscillations, the literature [
17] analyzes this and proposes that coordinating the deadband settings of hydro and thermal power unit governors can effectively suppress ultra-low-frequency oscillations. However, increasing the primary frequency control deadband means abandoning the governor’s adjustment to minor load fluctuations, which reduces the system’s frequency quality; setting the FLC deadband smaller than the governor deadband also implies a reduction in the unit’s primary frequency control performance. On the other hand, due to negative damping, the system outside the deadband may still oscillate near the deadband [
18]. And, governors frequently set PID control parameters too sensitively in order to meet frequency control performance indicators. This results in negative damping being provided by the hydro turbine governor to the system, which triggers ultra-low-frequency oscillation incidents. The governor’s PID parameters are optimized using the critical parameter method [
19] based on a linearized model. This improves system damping and suppresses ultra-low-frequency oscillations. The focus of PID parameter optimization is on enhancing the algorithm’s global optimization capability by improving the solution algorithm, which includes using methods with random dynamic inertia weight coefficients [
20].
This paper presents a set of ultra-low-frequency oscillation suppression strategies based on FLC by analyzing the mechanisms behind such oscillations. Initially, a direct current sensitivity sorting method considering the hydro distribution of the sending-end power grid is introduced. Subsequently, optimization of the parameters within the direct current FLC is achieved using a combination of Stochastic Subspace Identification and Non-Dominated Sorting Genetic Algorithm-II (NSGA-II), aiming to attain a more effective suppression of ultra-low-frequency oscillations.
2. Analysis of Ultra-Low-Frequency Oscillations and Mechanisms for FLC Suppression
For the hydroelectric generator units in the sending-end power grid, the equations governing their rotor motion can be derived as follows [
20]:
where
M represents the rotational inertia of the generator rotor, Δ
TM denotes the change in mechanical torque, Δ
TE signifies the change in electromagnetic torque, Δ
Tdc represents the variation in additional DC torque,
D stands for the damping coefficient, and Δ
ω indicates the change in angular velocity.
When ultra-low-frequency oscillations occur, the most significant variations primarily occur in the mechanical torque. The mechanical torque is predominantly determined by the governing system of the prime mover, represented by GGOV(s), which denotes the transfer function of the prime mover governing system. Therefore, the change in mechanical torque can be expressed as [
20]
where
s = j
ωd, and assuming
KGOV, represents the amplitude of the transfer function of the prime mover governing system in polar coordinates, and
φGOV represents the phase of the transfer function of the prime mover governing system.
Therefore, Equation (2) can be transformed into [
20]
Hence, Δ
TM can be divided into two parts:
where Δ
TS denotes the synchronous torque variation, and Δ
TD represents the damping torque variation.
The term
DGOV defines the prime mover damping coefficient [
20]:
Thus, Equation (1) can be transformed into [
20]
Figure 1 shows the damping coefficient decomposition coordinate system. The projection of Δ
TM on the abscissa represents Δ
TS, while the projection of Δ
TM on the vertical axis signifies Δ
TD. The projection of Δ
TM on the vertical axis represents the effect on dynamic stability. When
DGOV is greater than 0 and Δ
TD, which is equal to
DGOV multiplied by Δ
ω, and is less than 0, the projection of Δ
TM on the ordinate axis is positioned on the negative half-axis. This indicates that the speed control system provides positive damping torque. Conversely, when
DGOV is less than 0, the projection of Δ
TM on the ordinate axis is situated on the positive half-axis, indicating that the speed control system generates negative damping torque. The length of Δ
TD reflects the strength of damping. In the positive damping region, the length of the projection is directly proportional to the positive damping intensity provided by the control system. A larger absolute value of Δ
TD implies stronger positive damping, which is highly advantageous for system stability. However, in the negative damping region, the length of the projection is directly proportional to the negative damping intensity generated by the control system. A larger absolute value of Δ
TD implies stronger negative damping, which can be detrimental to system stability.
Within the range of 0 < f < 0.1 Hz, the negative damping coefficient provided by DGOV increases as Tw increases. For systems that contain large-capacity hydro-generating units, the damping coefficient DGOVwater of the water turbine governing system differs in some way from the system damping coefficient D when the direct current input of FLC is disregarded (i.e., ΔTdc = 0). If DGOVwater + D < 0, the system exhibits overall negative damping in the ultra-low-frequency range, which ultimately results in the generation of ultra-low-frequency oscillations.
Based on the equivalent method for the generator’s Δ
TM, the formula for calculating the additional direct current torque Δ
Tdc is the sum of the additional synchronous torque Δ
Tsdc and the additional damping torque Δ
TDdc, that is
where
Ddc represents the additional direct current damping coefficient.
Substituting Equation (7) into Equation (6), we can obtain [
20]
Therefore, by appropriately configuring the parameters of FLC, it is possible to provide positive damping to the system, countering the negative damping introduced by the hydro-generating units within the system (i.e., DGOVwater + D + Ddc > 0), ultimately achieving suppression of ultra-low-frequency oscillations.
5. Parameter Optimization of Additional FLC
5.1. Selection of Objective Function
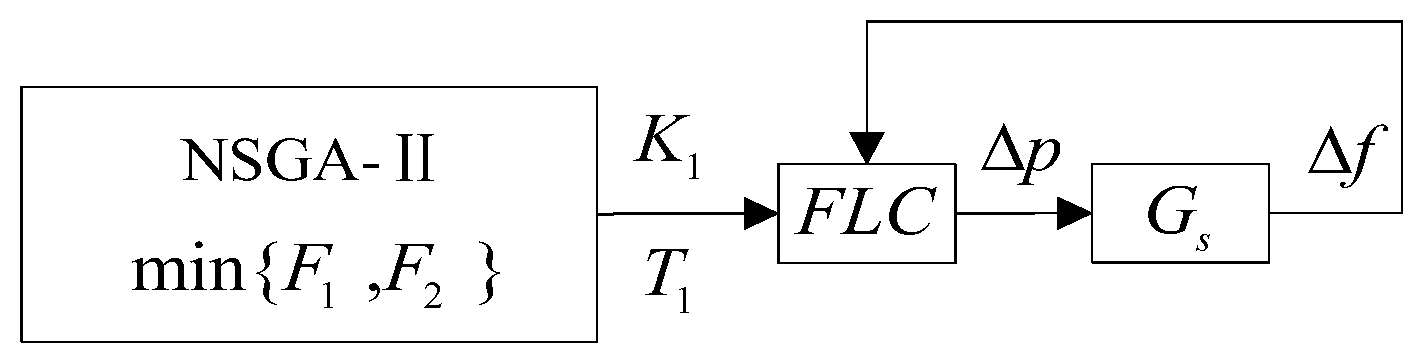
After obtaining the low-order linear model
Gk(s) of the system, this paper uses the Non-Dominated Sorting Genetic Algorithm-II (NSGA-II) with an elite strategy to optimize the Proportional–Integral (PI) parameters of the FLC for direct current
k [
22]. The FLC parameter optimization model is shown in
Figure 3.
The first optimization objective is to improve the system’s transient frequency response. After the direct current FLC participates in regulating the system’s frequency, it results in a superior effect, characterized by reduced peak frequency deviation, fewer oscillations in frequency under step disturbances, and a shorter recovery time for stability. Therefore, the effectiveness of the direct current FLC in enhancing the system’s transient frequency response can be measured by utilizing the standard deviation of the frequency. The objective function for optimization using the NSGA-II is expressed as the integral of the absolute value of the system frequency deviation Δ
f over time.
where
t is the simulation time;
T is the upper limit of the integration time; and Δ
f is the frequency deviation of the system.
Furthermore, during the participation of the DC FLC in the grid frequency regulation, the DC power varies with frequency changes. In this process, deviations from the rated operation of the DC transmission power will have certain effects on the DC system itself, and excessive deviations may adversely affect the converter station equipment. Therefore, in this paper, the integrated value of the total DC power deviation during the multi-DC FLC control process is taken as the objective function
F2 to measure the overall effect of multi-DC FLC on the DC system under different control parameters.
where
t is the simulation time;
T is the upper limit of the integration time; and Δ
PFLC is the deviation of the DC transmission power of the system.
This paper examines the dead-zone parameter of the direct current FLC as the decision variable for optimization. Therefore, it is crucial to ensure that the dead-zone of the direct current FLC remains greater than ±0.05 Hz during the optimization process. Increasing the dead-zone of the direct current FLC also increases the risk of instability in the system’s transient frequency stability. To ensure the safety and stability of the system, the upper limit for the dead-zone of the direct current FLC has been set to 0.1 Hz. In summary, the size of the dead-zone for the direct current FLC must meet the following criterion [
23]:
where
fdb represents the dead-zone parameter of the direct current FLC.
The direct current FLC output’s power regulation capacity is limited by the power transmission constraints within the DC system. To ensure the safe and stable operation of the DC system, the upper limit for the direct current FLC output power is approximately 1.1 times the rated power, while the lower limit is around 0.9 times the rated power. Based on the power–frequency characteristics of the system, it has been observed that a higher adjustable power capacity of the direct current FLC leads to a better frequency response of the disturbed system. However, larger variations in direct current power have a greater impact on both the transmitting and receiving ends of the DC system. Therefore, this paper sets the constraints for the power adjustment of the direct current FLC as follows [
23]:
where
PDC represents the rated power of the direct current system, and Δ
PFLC represents the adjustment active power of the direct current.
The multi-objective optimization model for the dead-zone parameters of the direct current FLC constructed in this paper can be described as follows:
5.2. Optimization Process of NSGA-II Algorithm
Figure 4 shows the flowchart of the NSGA-II algorithm.
Step 1: Initialization of the algorithm involves defining the objective functions and configuring algorithm parameters based on the practical aspects of problem-solving. Key parameters include population size, iteration count, crossover rate, mutation rate, among others. Initialize the population Pt, and set t = 0.
Step 2: Compute the fitness of each individual within the population.
Step 3: Select N individuals from set Pt using a chosen mechanism and perform crossover and mutation operations on them to generate offspring population Qt.
Step 4: Merge Pt and Qt to form a new population Rt, where Rt = Pt ∪ Qt.
Step 5: Conduct fast non-dominated sorting on the combined parent and offspring population Rt to create a new non-dominated layer set. Then, compute the crowding distance for each individual within the population.
Step 6: Use Rt to generate a new population, Pt+1.
Step 7: Check if the algorithm’s termination condition is met. If it is, terminate the algorithm. If not, repeat steps 3 to 6 until the termination conditions are satisfied, resulting in the optimal outcome.
6. Case Studies
The effectiveness of the ultra-low-frequency oscillation suppression scheme based on FLC is validated using an example of an interconnected power grid in a certain regional area, as shown in
Figure 5.
Area 1′s power grid is interconnected through several DC projects, including a ±800 kV line (6400 MW), a ±800 kV line (7200 MW), a ±800 kV line (8000 MW), a ±500 kV line (3000 MW), and a back-to-back ±420 kV line (5000 MW), connecting with the external power grid. The grid in Area 1 consists of six major hydropower channels, and this study focuses on it. The impact of frequency variations on DC transmission power at the receiving end is disregarded. The DC project d and three major UHVDC transmission lines are operating at full capacity. This is achieved using constant current control on the rectifier side and constant voltage control on the inverter side. The back-to-back DC project exports 2000 MW of power.
6.1. Additional FLC DC Sensitivity Ranking
The stochastic subspace method steps are used to identify data and showcase varying power changes in different DC projects under the same frequency deviation, as shown in
Table 2.
The power variations are as follows: a back-to-back DC project with a power change of 0.5 pu, DC project d with a power change of 0.3 pu, DC project a with a power change of 0.11 pu, DC project b with a power change of 0.09 pu, and DC project c with a power change of 0.089 pu. Applying a power disturbance of 100 MW to each DC project individually using a comprehensive program, we determined the FLC impact factors for the back-to-back DC project, DC project a, DC project b, DC project c, and DC project d. The impact factors were calculated as 65%, 50%, 12%, 48%, and 58%, respectively. The DC sensitivity ranking for the additional FLC in the Area 1′s power grid is presented in
Table 3.
Table 3 shows that DC project b is the most effective in suppressing ultra-low-frequency oscillations, considering both sensitivity to these oscillations and the impact of DC FLC on the AC system. DC projects c and a demonstrate similar suppression effects, which are very close to the suppression effect of DC project b. DC project d is connected to the three major UHVDC lines, while the back-to-back DC project has the lowest suppression effect.
6.2. Verification of a Scheme for Suppressing Ultra-Low-Frequency Oscillations
To enhance the practical guidance of the ultra-low-frequency oscillation suppression scheme, the effectiveness of the proposed approaches will be validated using single DC and multiple DC schemes as examples.
6.2.1. Suppression Scheme of Single Direct Current Ultra-Low-Frequency Oscillation
Using the installation site of FLC as an example in DC project b, a single direct current scheme for suppressing ultra-low-frequency oscillations is illustrated, combined with a NSGA-II. The system’s frequency is perturbed by applying it to DC project b. The system’s low–order linearized model is then identified using the Random Subspace Method. When the order of the system is 8, Equation (28) represents the open-loop transfer function of the system.
Figure 6 illustrates the comparison between the actual system and the output signal of the transfer function.
Using the installation site of FLC as an example in DC project b, a single direct current scheme for suppressing ultra-low-frequency oscillations is illustrated, combined with a Non-Dominated Sorting Genetic Algorithm-II. The system’s frequency is perturbed by applying it to DC project b. The system’s low–order linearized model is then identified using the stochastic subspace method. When the order of the system is 8, Equation (28) represents the open-loop transfer function of the system.
Figure 7 illustrates the comparison between the actual system and the output signal of the transfer function.
An optimization model was developed using the NSGA-II algorithm in MATLAB, based on the low–order linear model obtained through system identification. The dead-zone for the FLC is set at 0.05 Hz, which exceeds the dead-zone of the hydroelectric unit governor at 0.048 Hz. The initial population size is set to 200, with a maximum iteration count of 500. The recommended values of 20 were used for both the crossover distribution parameter and mutation distribution parameter. The crossover probability was set to 0.9, and the mutation probability is set to 0.1. Iterations continued until the maximum iteration count was reached. The optimized FLC parameters for DC engineering B were determined to be K1 = 1.4910 and T1 = 0.5436.
To validate the effectiveness of the proposed approach, an N−1 fault is induced in the critical AC2 transmission line. Three simulation scenarios were conducted to observe the system frequency variation curves. The scenarios included without FLC in the DC system, with FLC implemented in DC project d, and with FLC implemented in DC project b. The results are illustrated in
Figure 7.
The implementation of DC project b’s DC FLC successfully suppressed the system’s ultra-low-frequency oscillations. Moreover, it is worth noting that when FLC is added to DC project b, the system frequency deviation stabilizes within 2.4 s, which is faster than the 7.6 s required for DC project d, assuming equal DC modulation power between the two projects. Furthermore, DC project b exhibits a maximum frequency deviation of only 0.3 Hz during the recovery process, compared to 0.6 Hz for DC project d. These results confirm the effectiveness of the DC ranking factor in favor of adding FLC to DC project b over DC project d.
6.2.2. Multiple DC Scheme for Suppressing Ultra-Low-Frequency Oscillations
Following the deployment of the planned back-to-back DC projects, it is expected that all three ultra-high-voltage grids in Area 1 may use FLC. To mitigate impacts on the receiving-end system, multiple DC lines will concurrently modulate and suppress ultra-low-frequency oscillations, thereby collectively sharing the DC power adjustment. Therefore, it may be considered to implement DC projects a, b, and c simultaneously to effectively suppress ultra-low-frequency oscillations (l = 3).
In
Section 6.2.1, the optimization outcomes of the FLC in DC project a were detailed. After integrating the FLC of DC project a, perturbations were imposed on DC project c to observe the system’s frequency variations. The stochastic subspace method was used to identify the system model, and the NSGA-II algorithm was used to determine the optimized parameters for DC project b, resulting in
K2 = 12.848 and
T2 = 0.2592. The optimized FLCs of DC projects a and c were then implemented, and the system model was identified again using the Random Subspace Method and the NSGA-II algorithm. This yielded the optimized parameters for DC project c as
K3 = 3.6785 and
T3 = 0.3296.
Figure 8 illustrates the system frequency variation curve used to validate the effectiveness of the multi-DC approach in the event of an N−1 fault occurring in the critical AC2 interconnection line.
Simulations were conducted for two scenarios: one where only DC project a engages FLC, and another where all three DC projects (a, b, and c) engage FLC simultaneously. According to the figure, the system frequency deviation reaches stability within 1.2 s when all three DC projects engage FLC simultaneously, with a maximum frequency deviation of 0.4 Hz during the recovery process. The proposed approach appears to suppress ultra-low-frequency oscillations more effectively than the single DC engagement scheme, as the latter takes 12.3 s to stabilize with a maximum deviation of 0.6 Hz. This suggests that the proposed approach may be more effective overall.
Furthermore, a comparison was carried out between the simulation results obtained using the PSO algorithm and the method described in this paper. The comparison was performed for the scenario in which all three DC projects (DC projects a, b, and c) simultaneously engage FLC. It was noted that the maximum frequency deviation during the recovery process with the PSO algorithm was approximately 0.5 Hz. In comparison to the PSO algorithm, the method proposed in this paper aims to achieve a smoother process for recovering system frequency, with smaller fluctuation amplitudes. Meanwhile, according to the literature [
23], multi-objective optimization algorithms have been shown to outperform single-objective optimization algorithms.
7. Conclusions
(1) The use of DC FLC as a suppression measure has effectively mitigated the occurrence of ultra-low-frequency oscillations in multi-DC transmission systems following asynchronous interconnection.
(2) Addressing the phenomenon of ultra-low-frequency oscillations in the sending-end system, a direct current ordering method based on the hydroelectric distribution at the sending end has been used to provide a more comprehensive approach to sorting multiple DC systems.
(3) Transforming the optimization problem of multiple DC FLC parameters into several individual DC FLC parameter optimization problems has reduced the complexity of the optimization problem. This enables better application in engineering practices. And, the proposed method has a significant advantage in suppressing ultra-low-frequency oscillations in multiple DCs. It reduces the suppression time by ninety per cent compared to a single DC. Additionally, the designed method reduces the oscillation amplitude and improves the frequency stability of the system compared to other methods.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}