
Techno-Economic Planning of a Fully Renewable Energy-Based Autonomous Microgrid with Both Single and Hybrid Energy Storage Systems

 ,
,  , , ,
, , ,  and
and
Abstract
1. Introduction
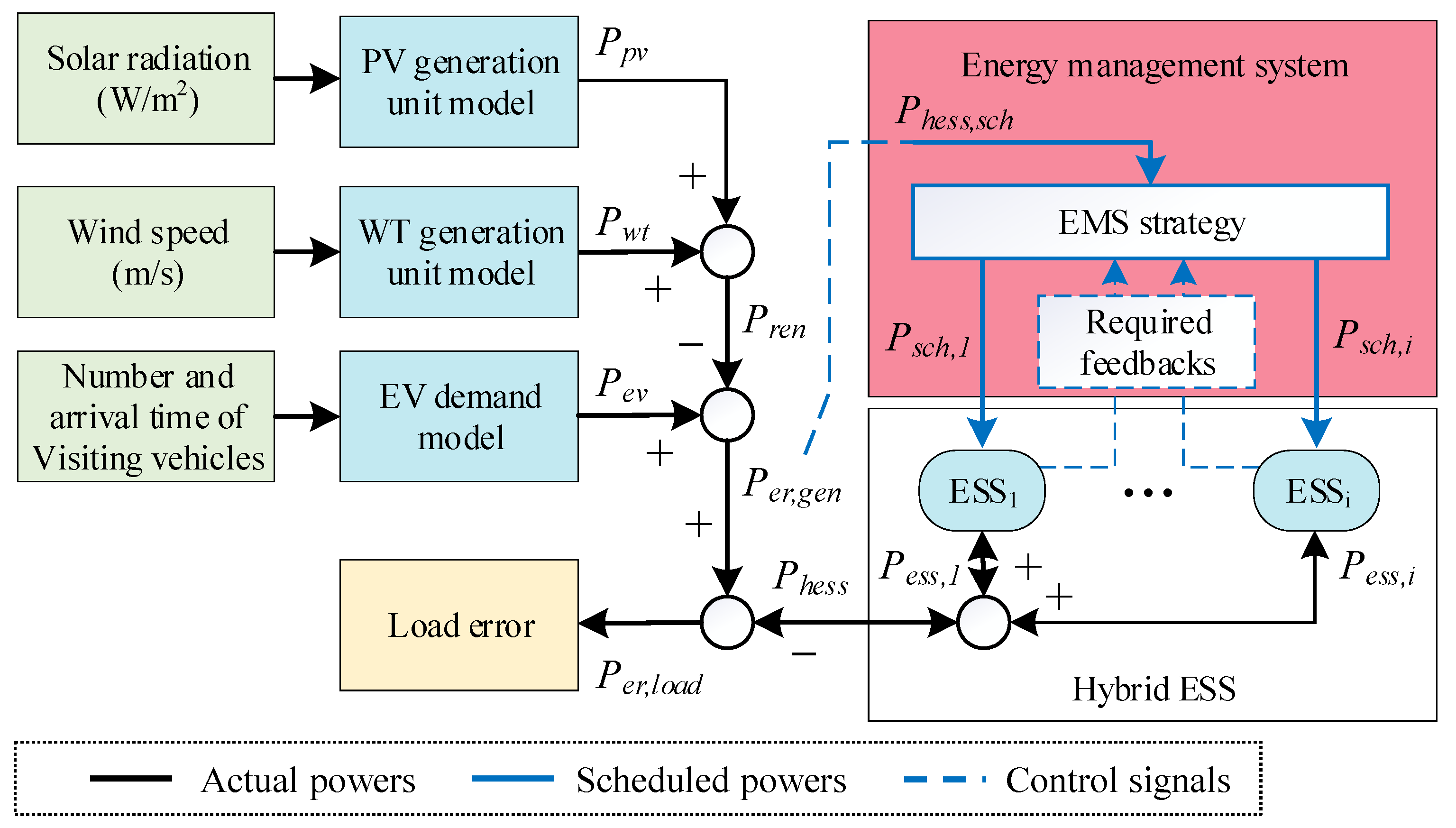
- A general power-in-power-out model of ESSs is extended for long-term studies, e.g., the sizing and planning of ESSs, which is also improved in terms of the local energy management system (EMS) against the original model [26].
- A modified COE (MCOE) is proposed as the main characteristic to compare different plans including the main terms of COE, i.e., total costs and total provided energy for the EV demand, and two added terms including the present value of ESSs and the EV unmet energy, i.e., the EV energy demand that could not be supplied by either RESs or ESSs. The first additional term helps to make the economic analysis free from the ESS lifetime, and the second increases the weighting coefficient of the technical aspect in the techno-economic sizing and decision-making.
- Sensitivity analysis is used for both single and hybrid ESSs to compare different combinations of participants in the techno-economic planning studies. In the single-ESS studies, the feasible search space is composed of the number of wind turbines, the number of solar panels, and the single-ESS nominal capacity, and in the HESS studies, it includes the nominal capacity of different ESS battery technologies. The sensitivity analysis-based planning provides several suitable plans with reasonable conditions.
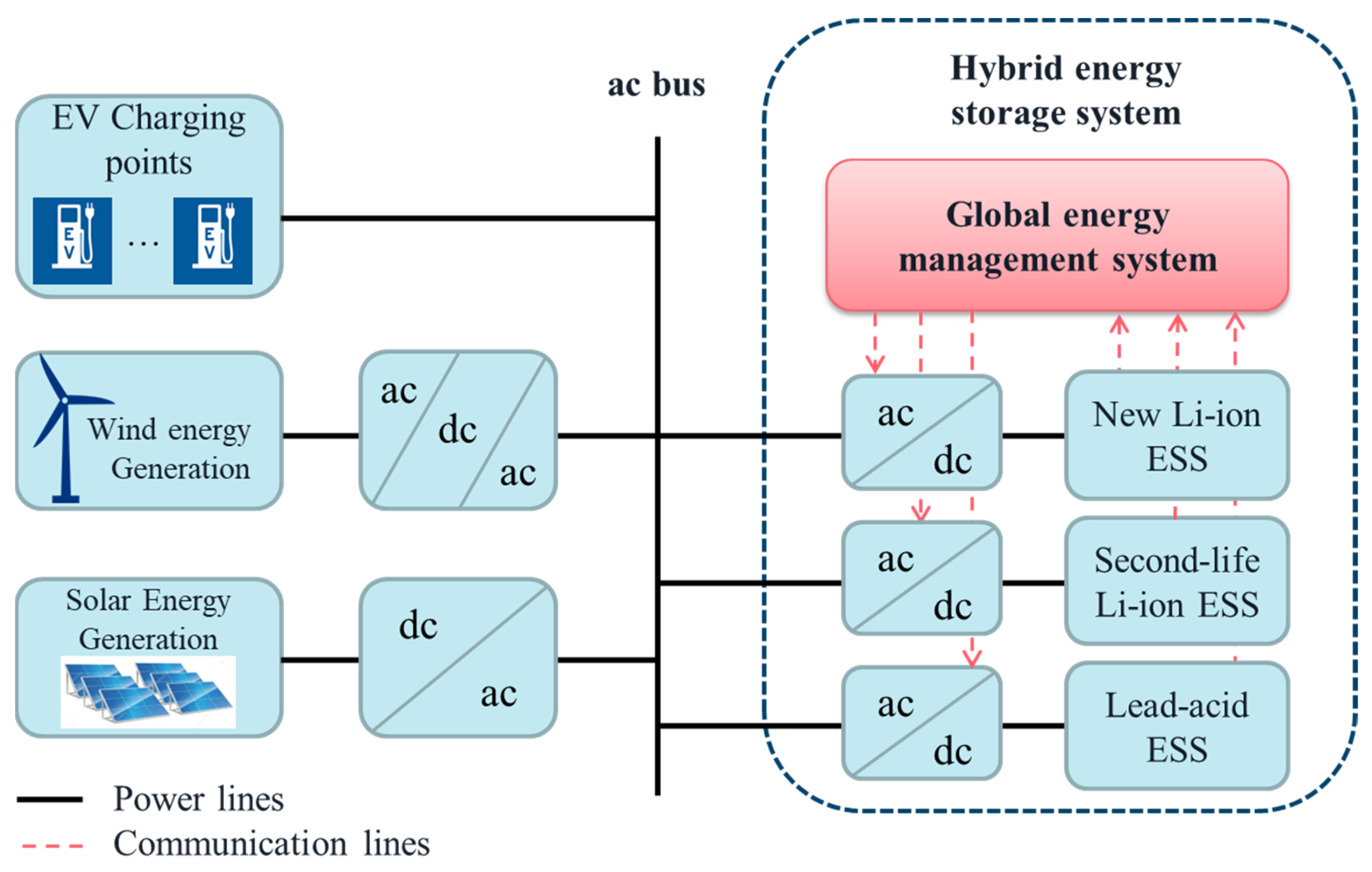
- The impact of the global EMS strategy of the HESS on the techno-economic characteristics is studied, where a power-sharing-based EMS is developed to be compared with a simpler logic-based EMS.
2. Techno-Economic Modelling
2.1. Technical Modelling
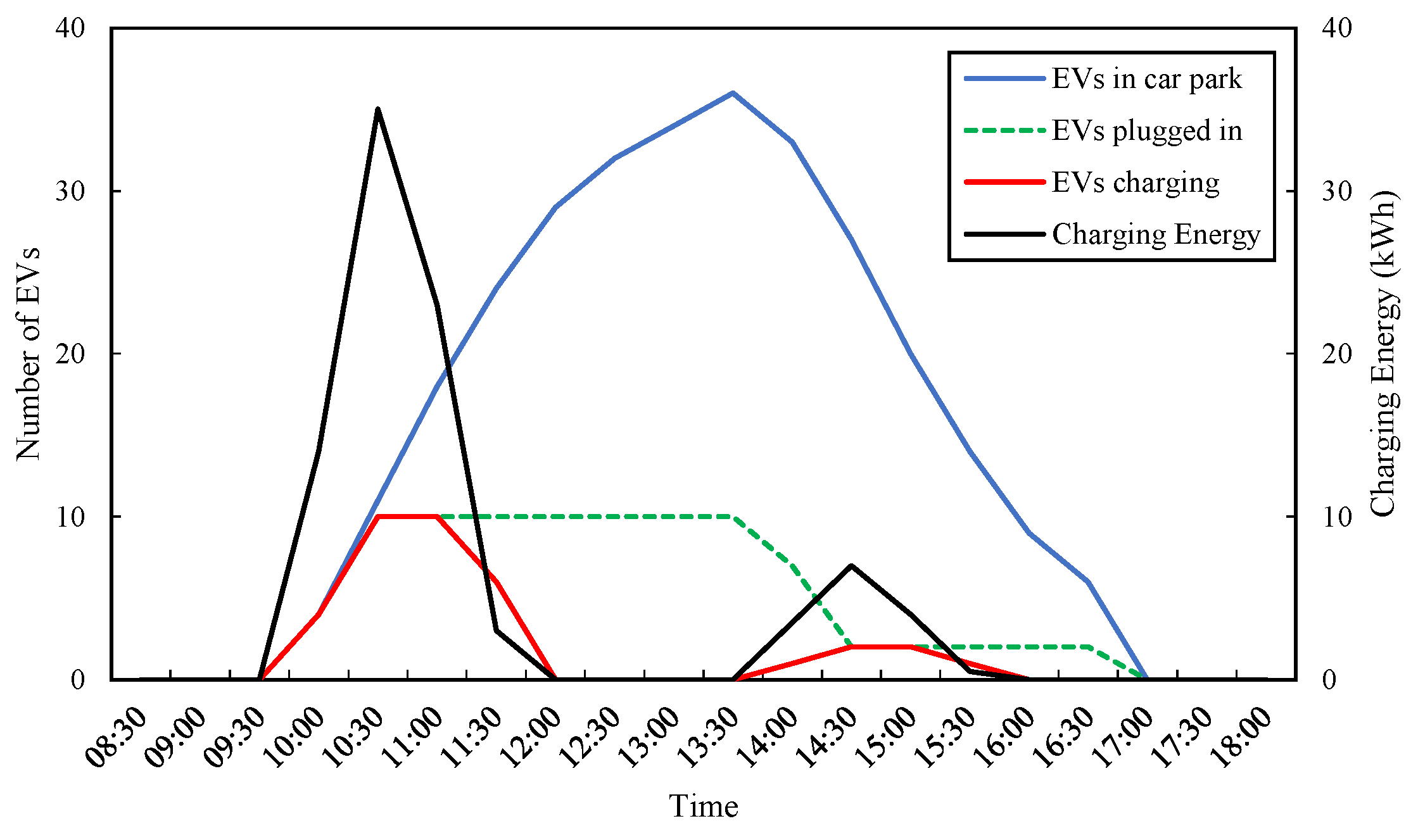
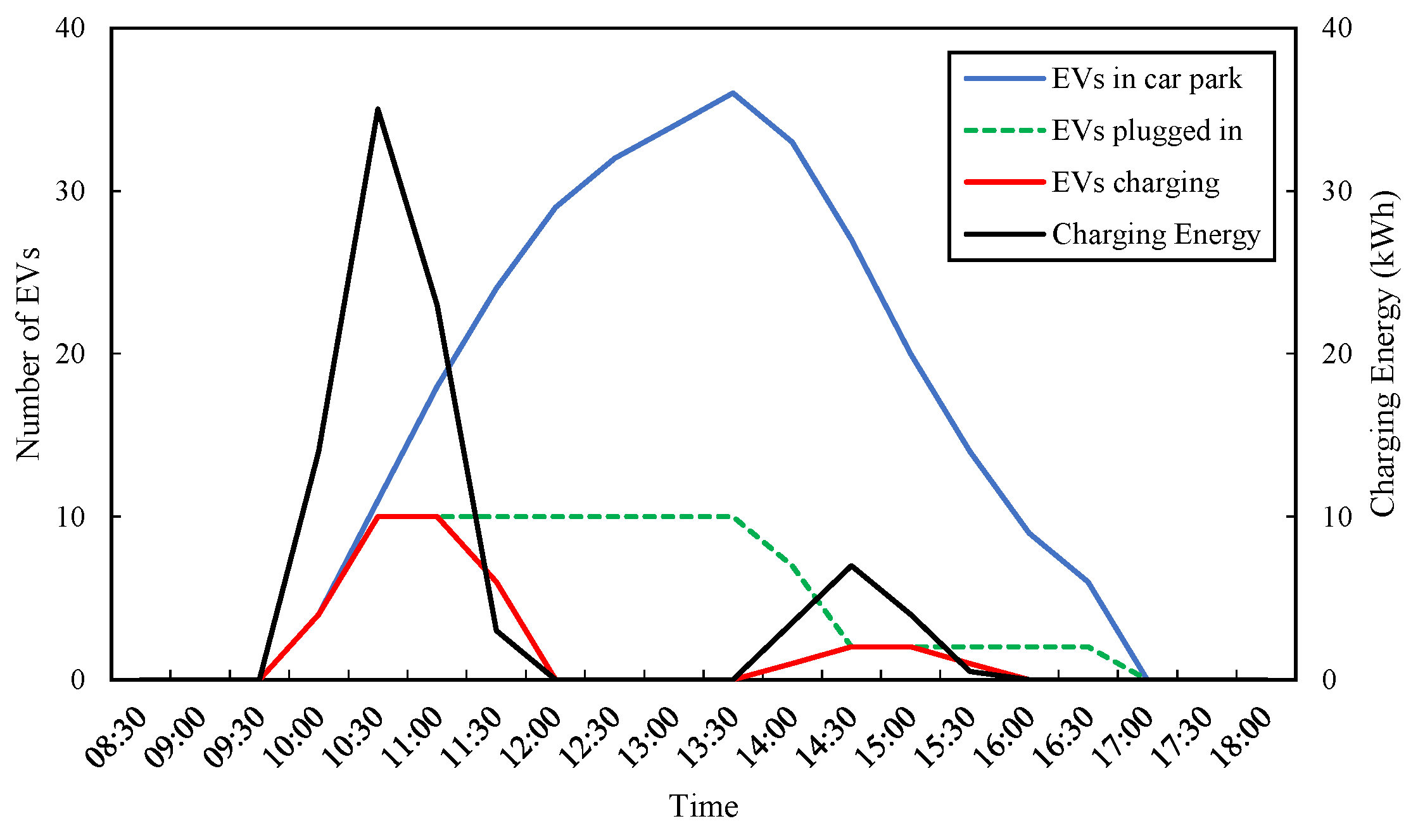
2.1.1. EV Demand Power
2.1.2. Wind Generation Power
2.1.3. Solar Generation Power
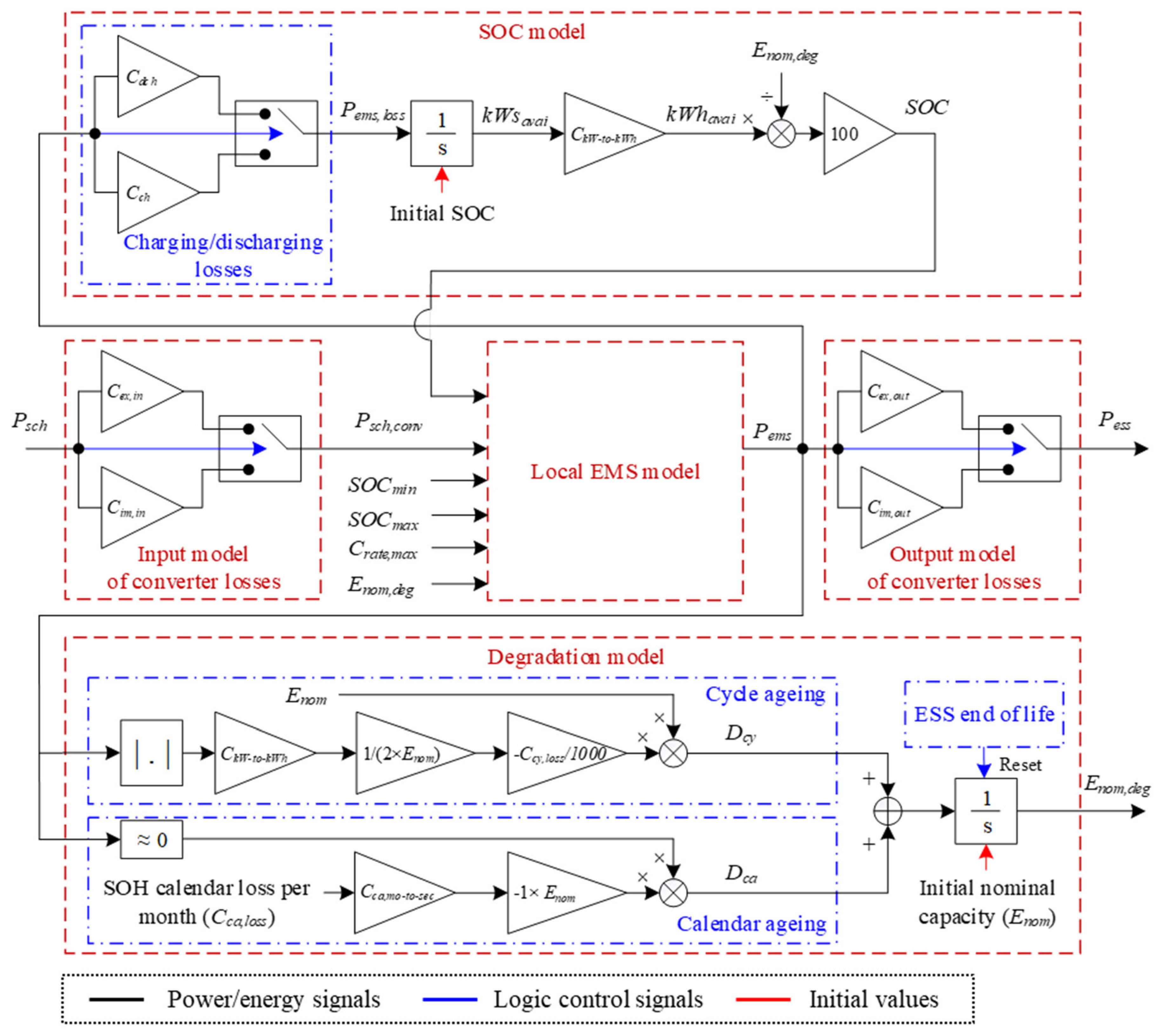
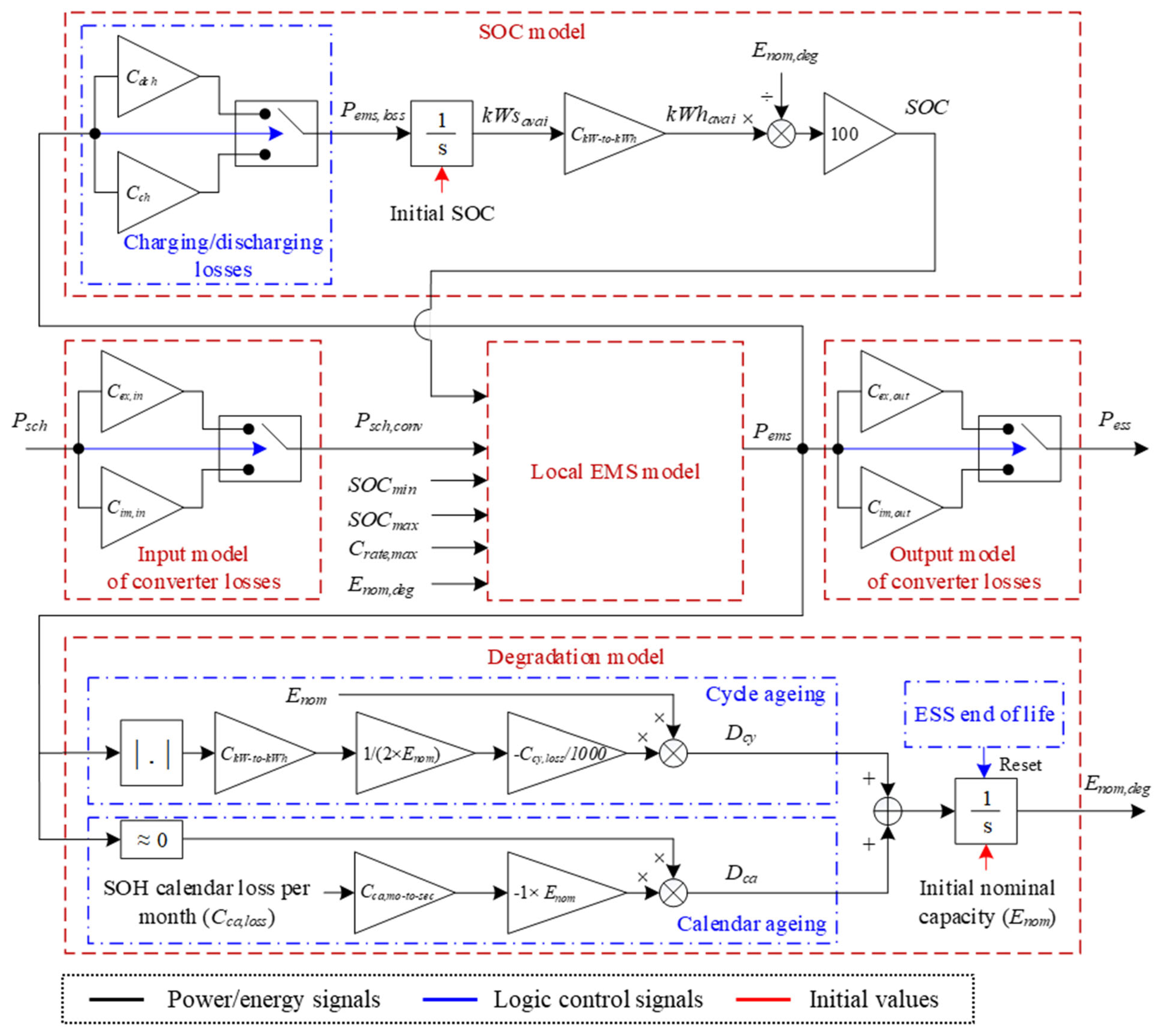
2.1.4. ESS Power-in-Power-out Model
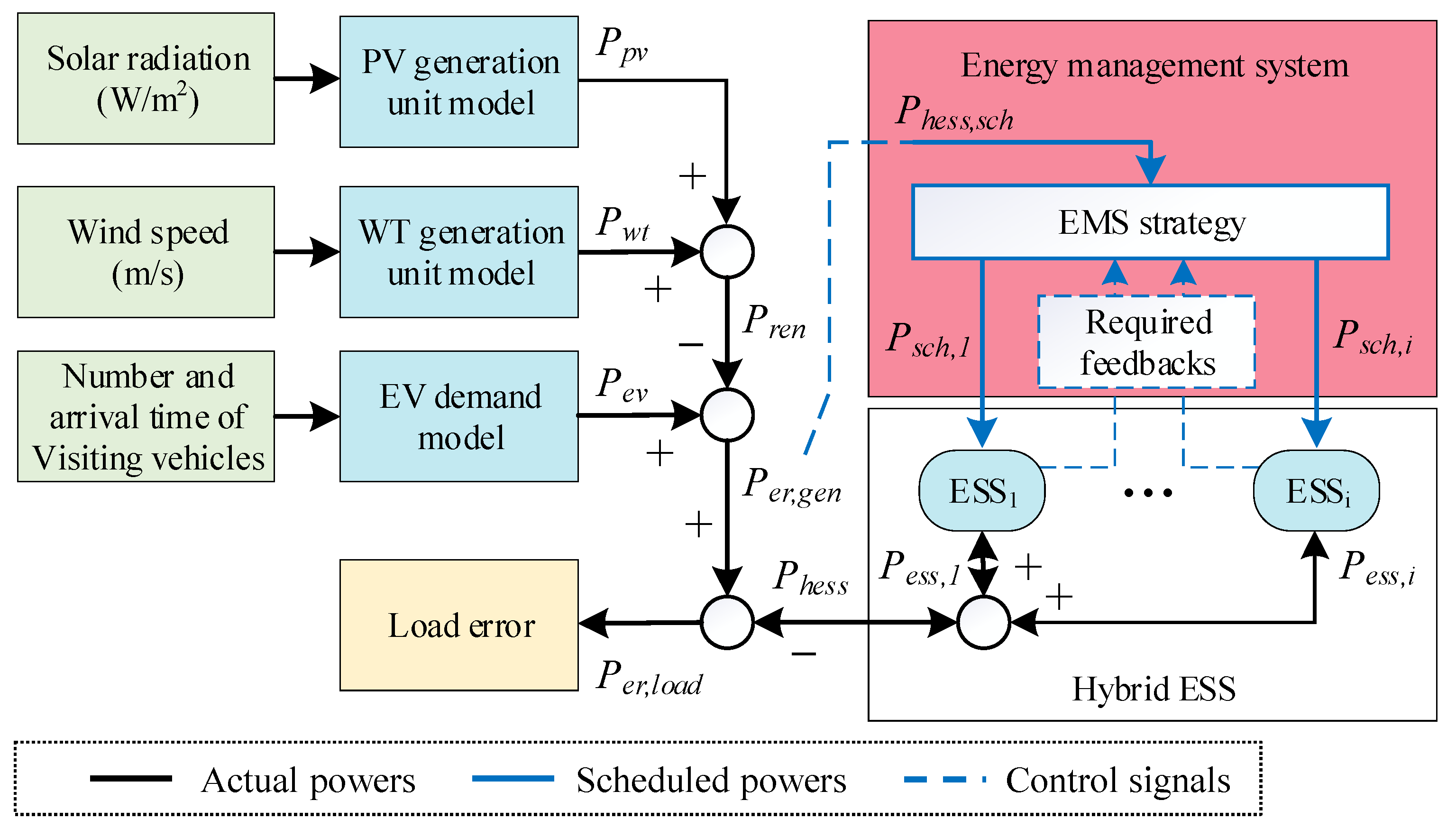
2.1.5. HESS Energy Management Model
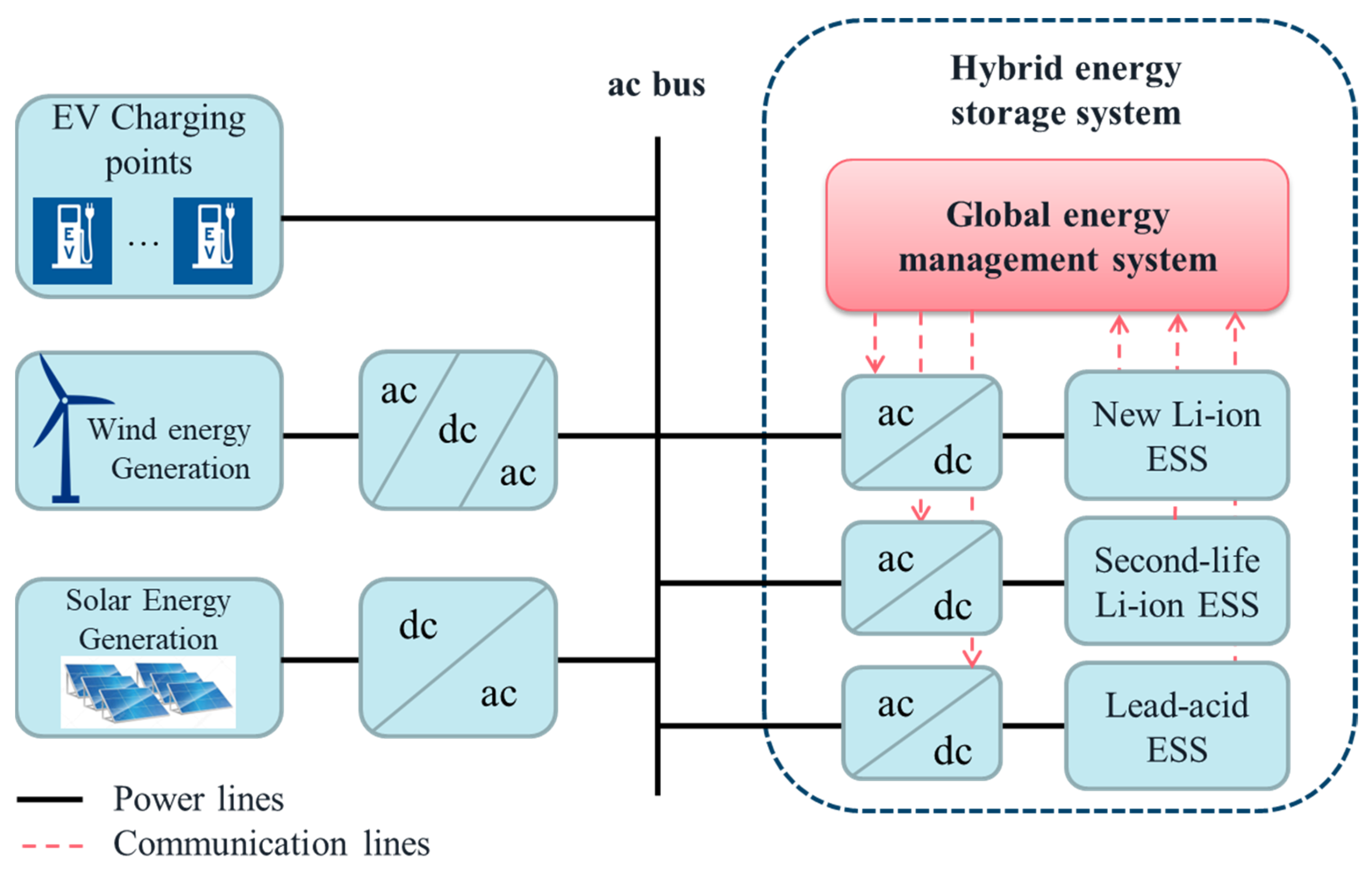
2.1.6. Autonomous Microgrid Model
2.2. Economic Modelling
2.2.1. Wind Generation Costs
2.2.2. Solar Generation Costs
2.2.3. EV Charging Station Costs
2.2.4. ESS Costs
2.2.5. Construction Costs
2.2.6. Total Costs
3. Microgrid Planning
3.1. Proposed MCOE as a Planning Characteristic
3.2. Sensitivity Analysis-Based Planning
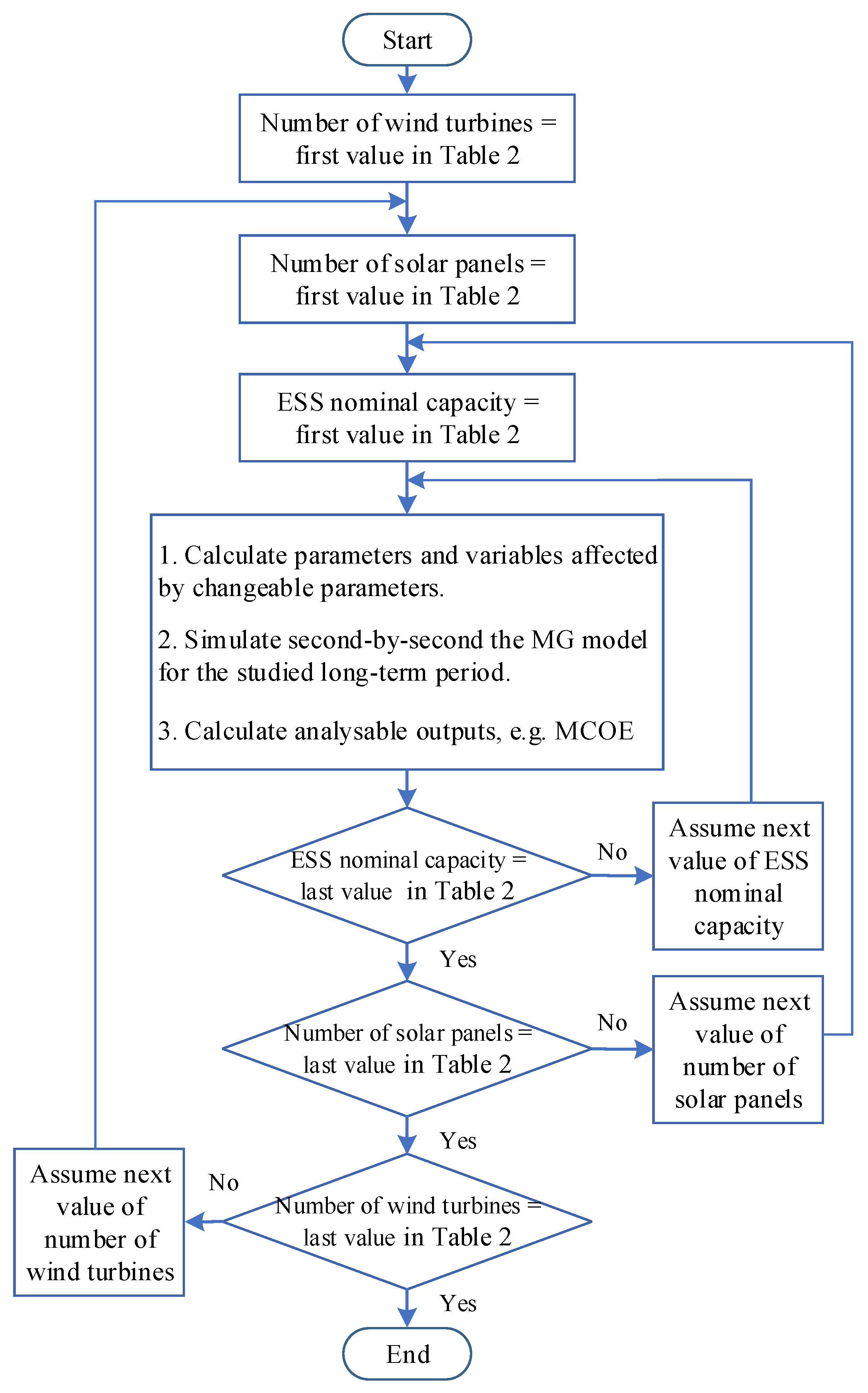
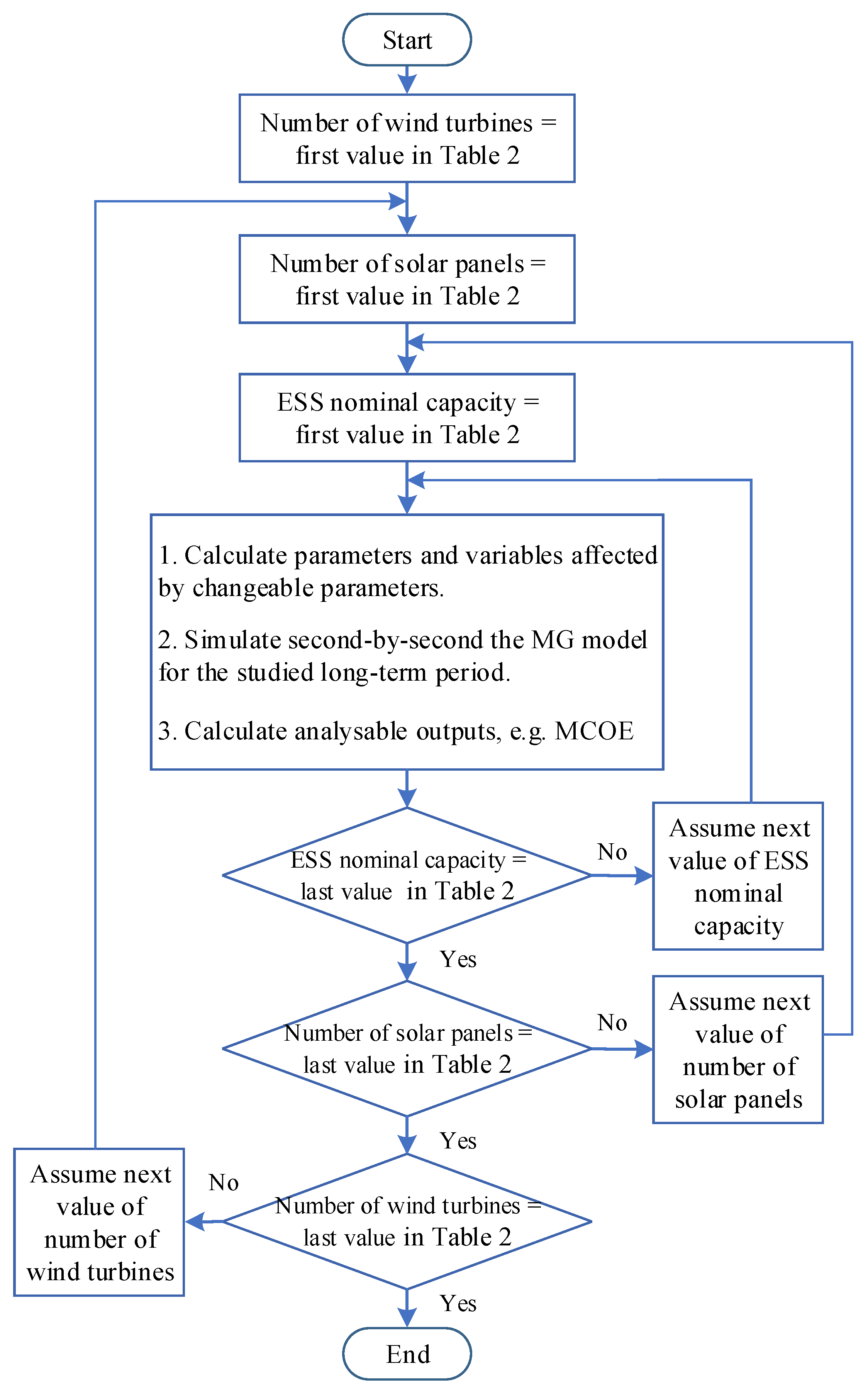
3.2.1. Wind Generation, Solar Generation, and Single ESS Planning (SAP1)
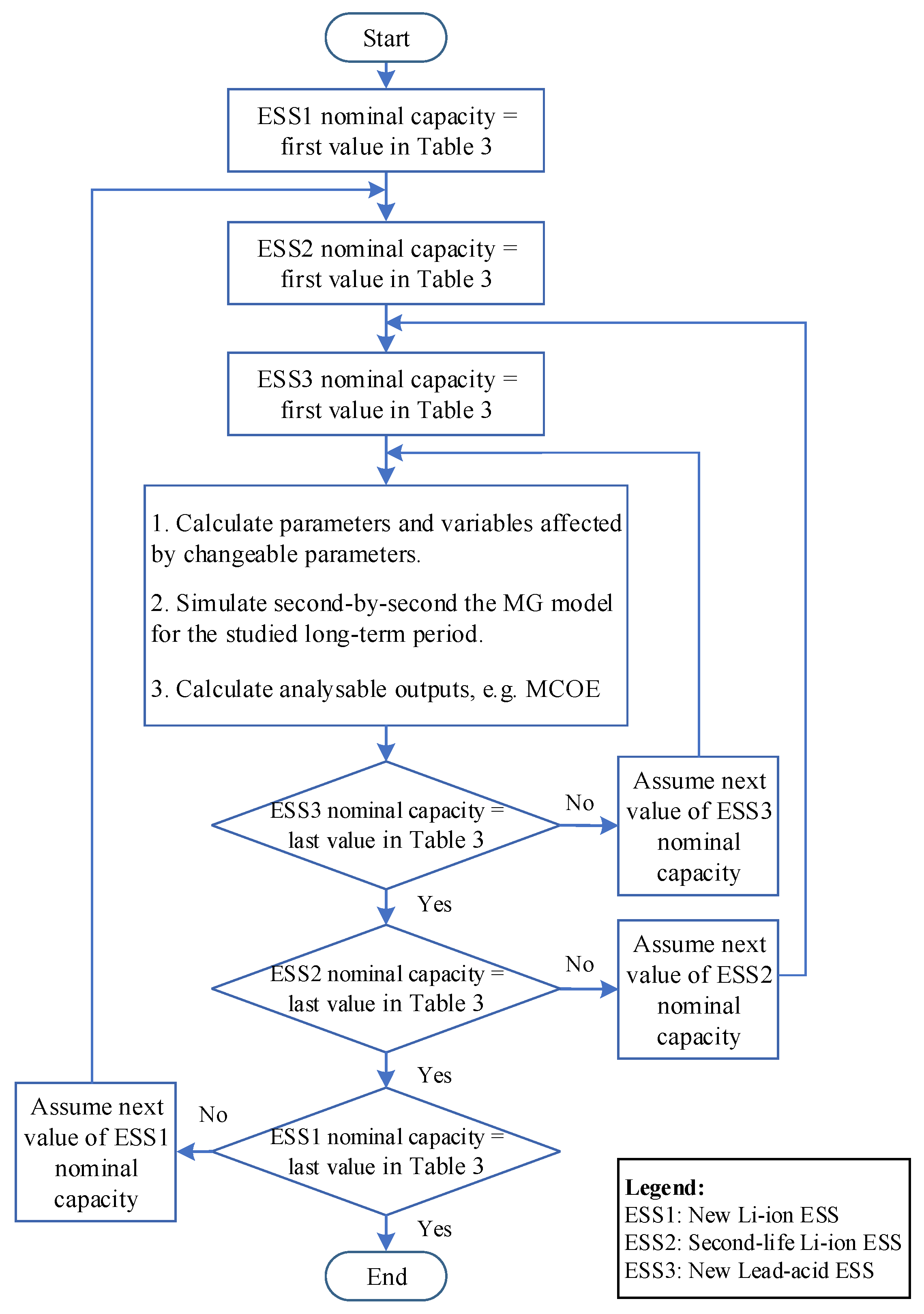
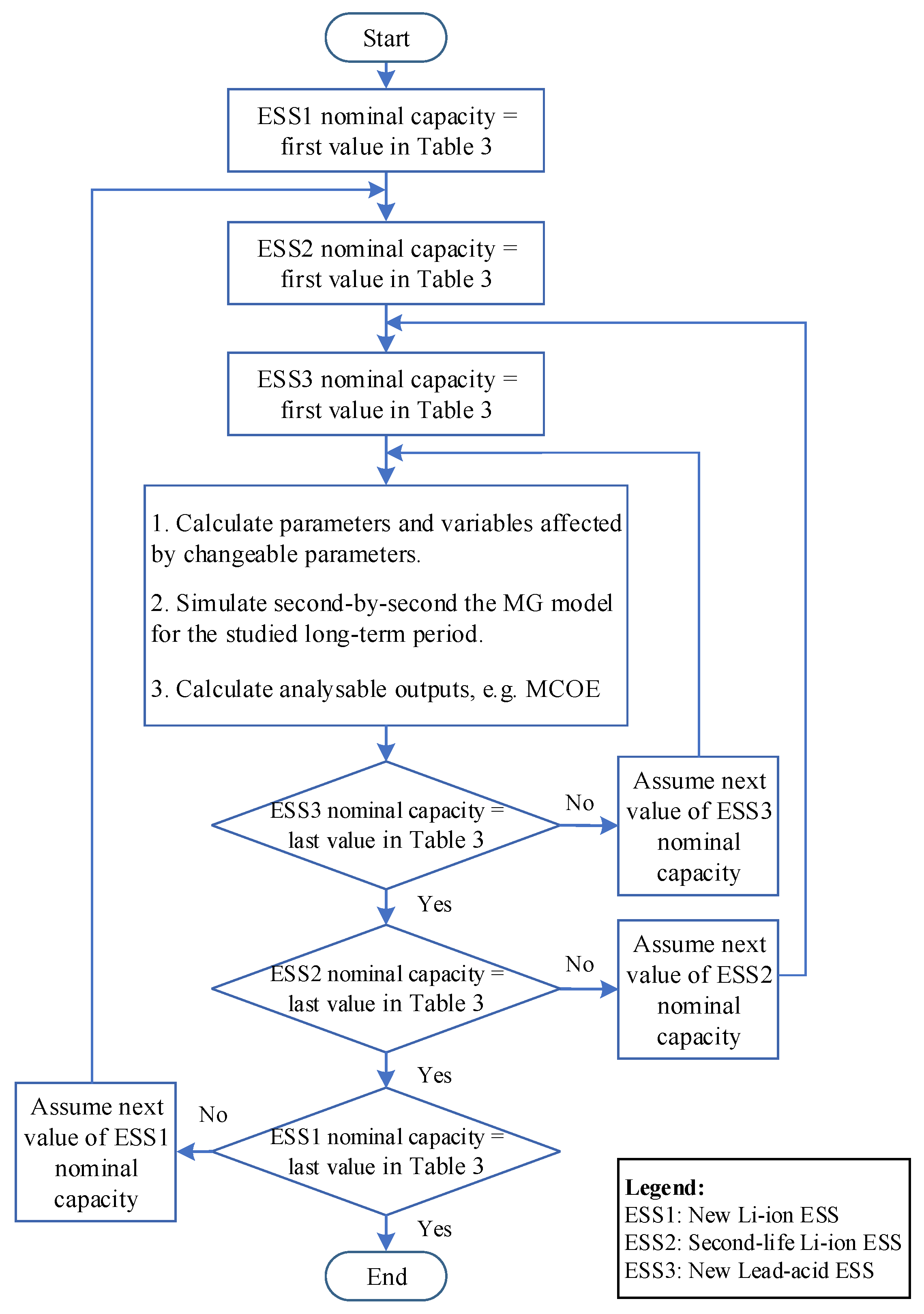
3.2.2. Hybrid ESS Planning (SAP2)
4. Simulation Results and Discussions
4.1. Studied System
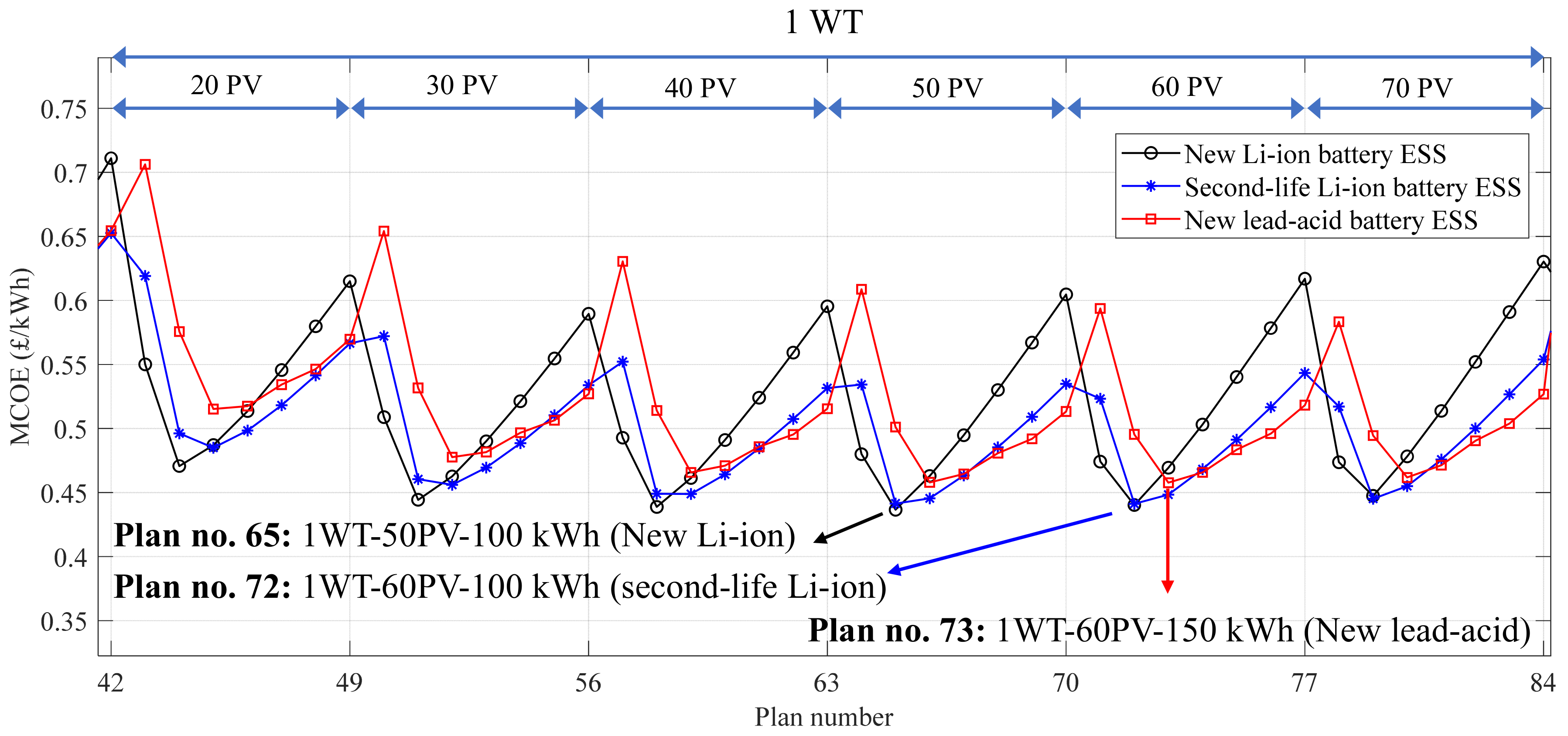
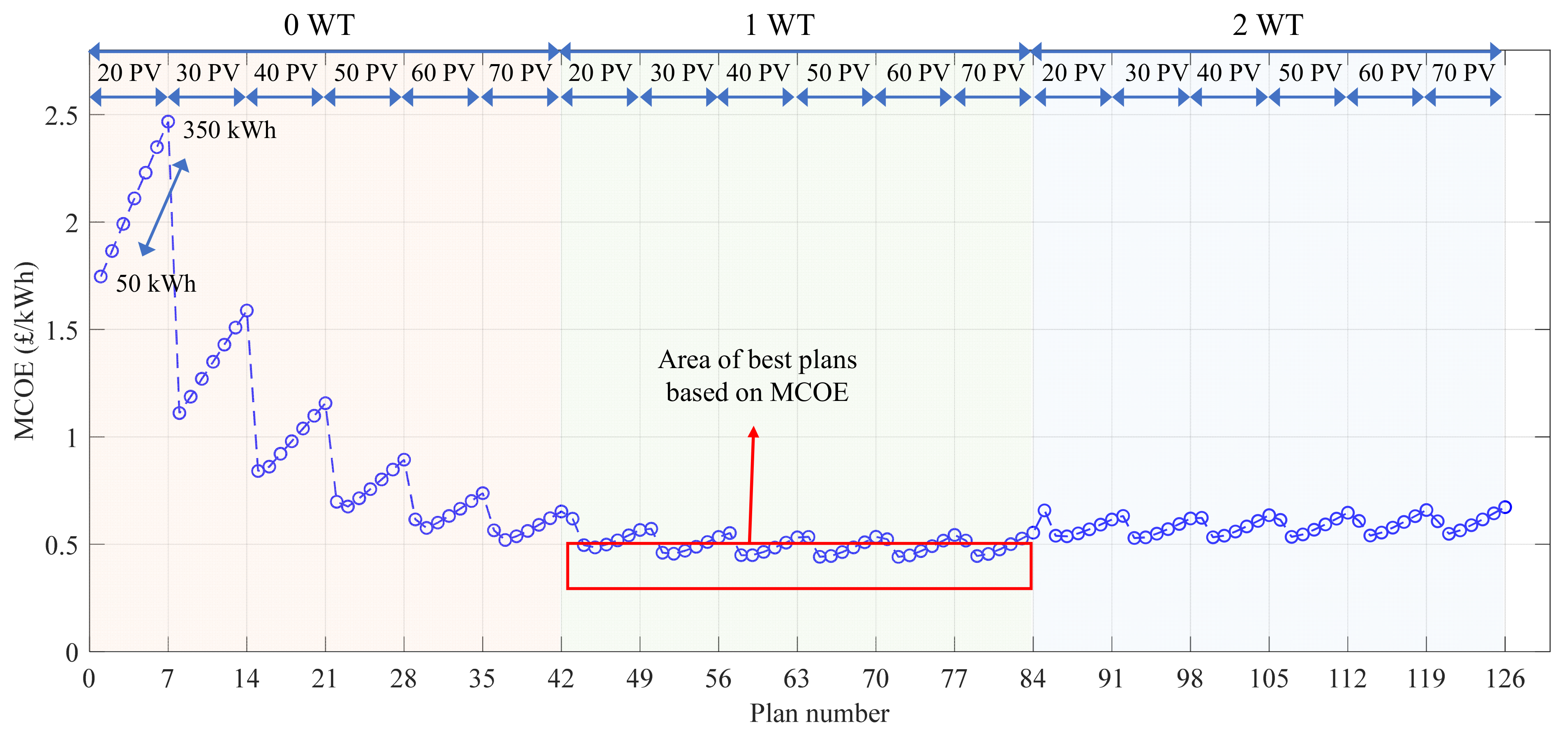
4.2. Comparing All Feasible Plans in SAP1
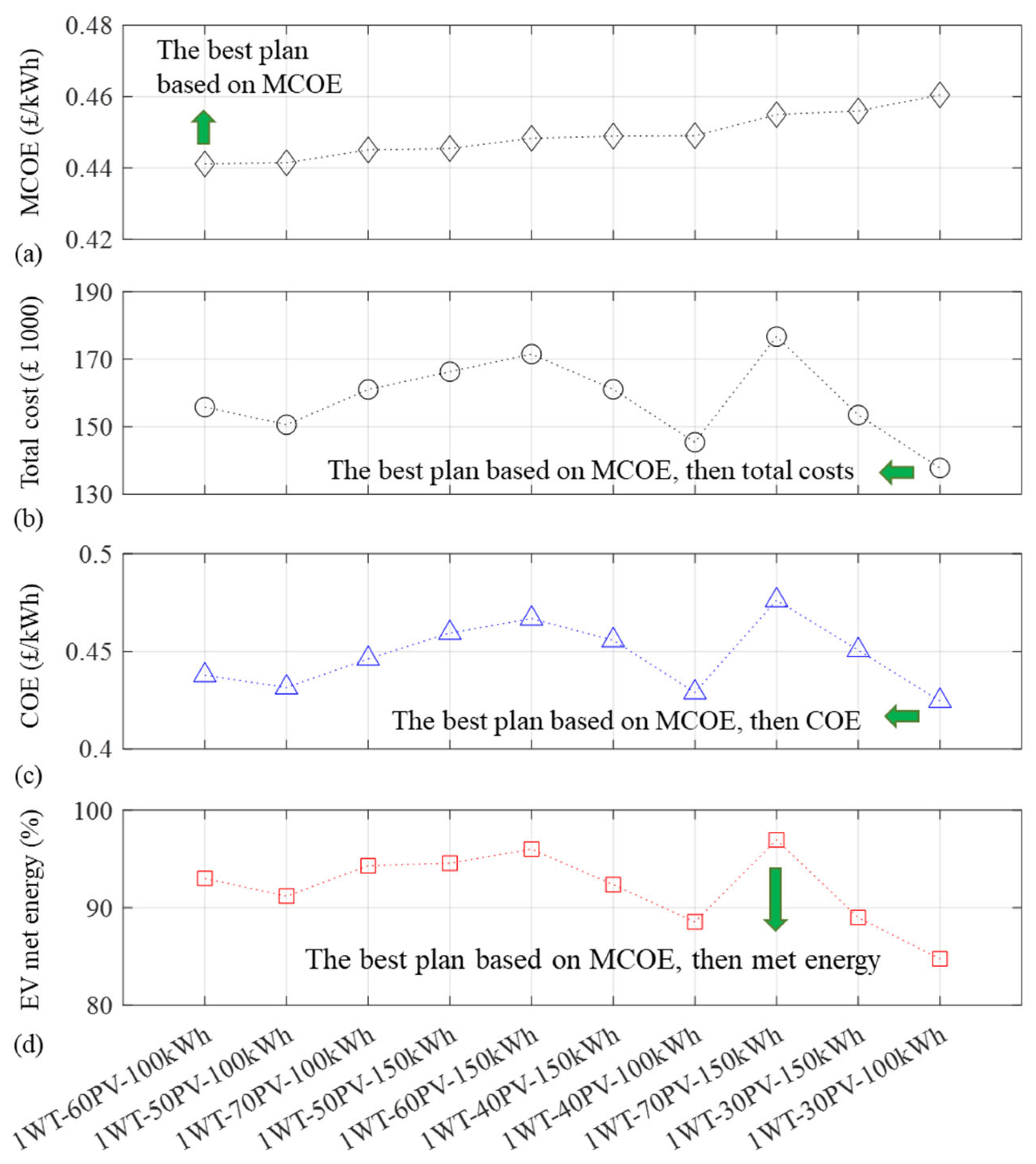
4.3. Techno-Economic Comparison of Best Plans in SAP1
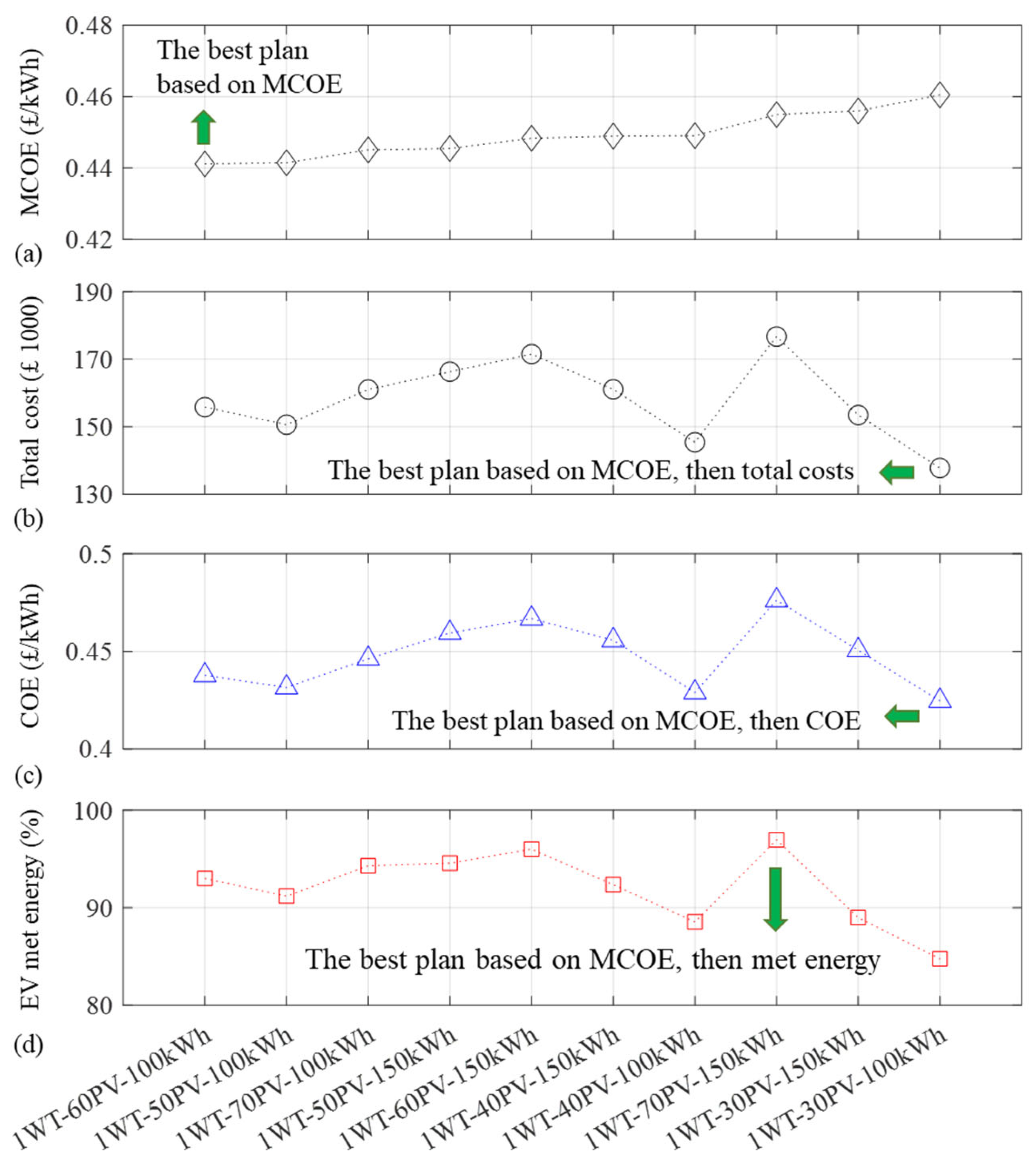
4.3.1. Ten Best Plans in SAP1
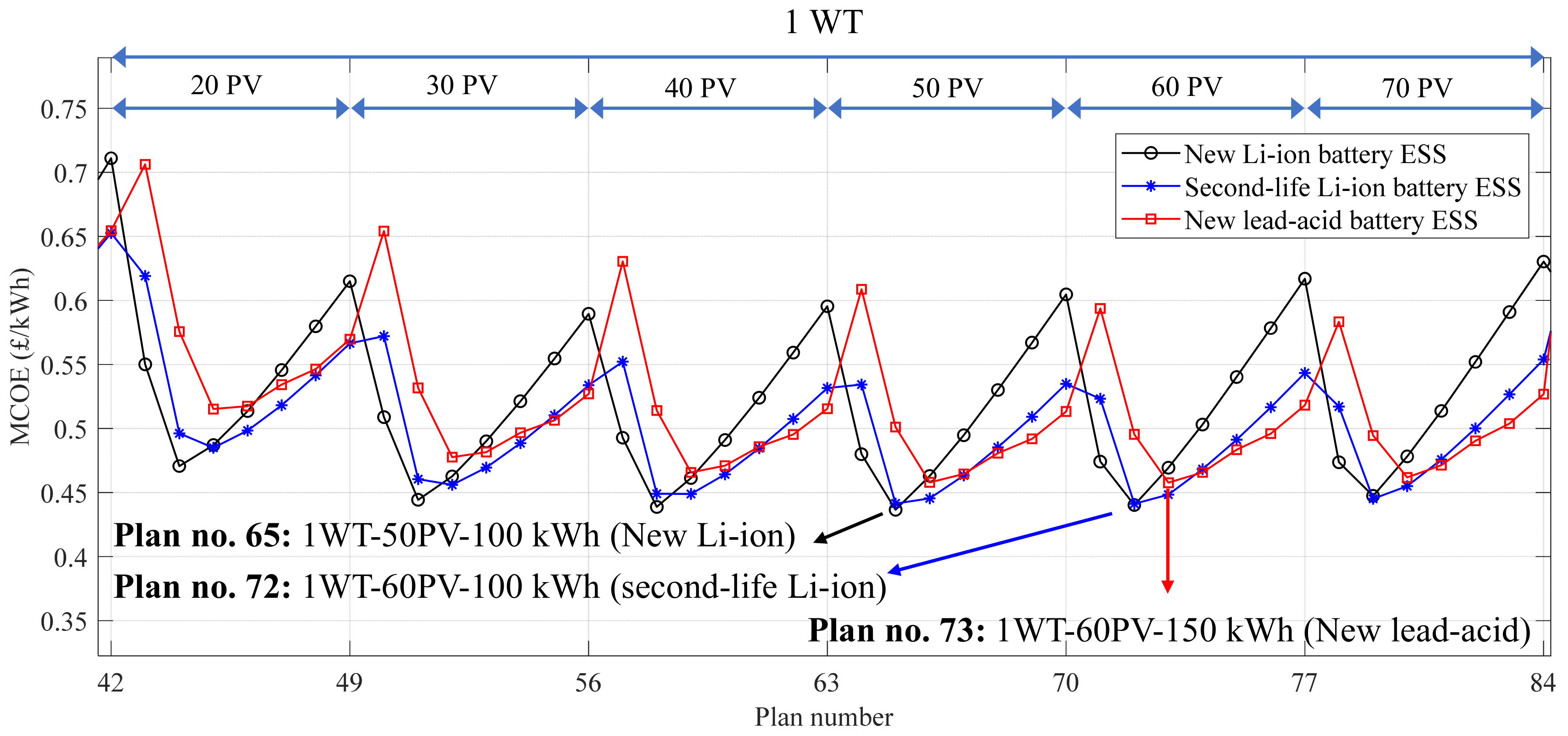
4.3.2. Comparing Different Single ESS Technologies in SAP1
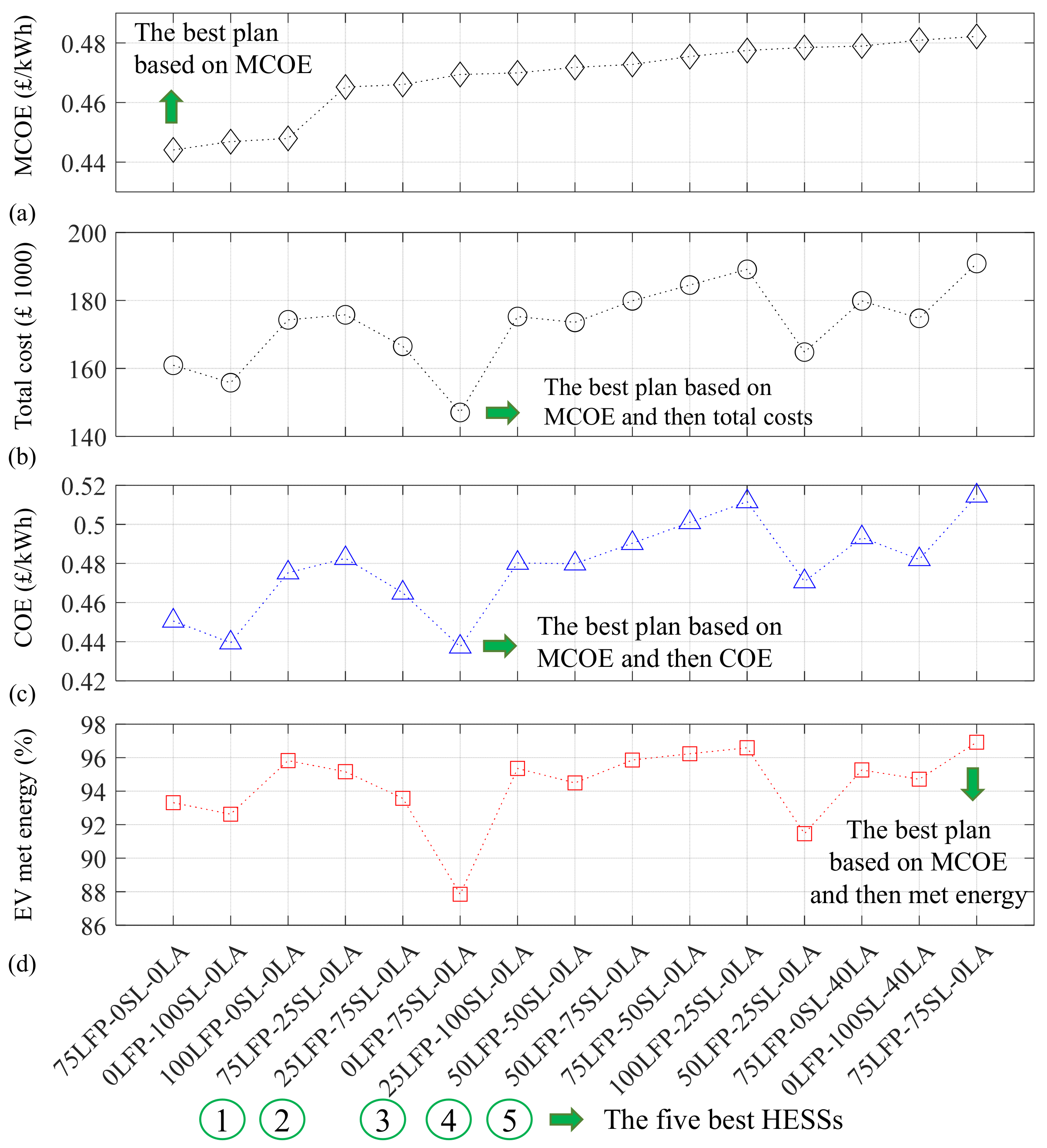
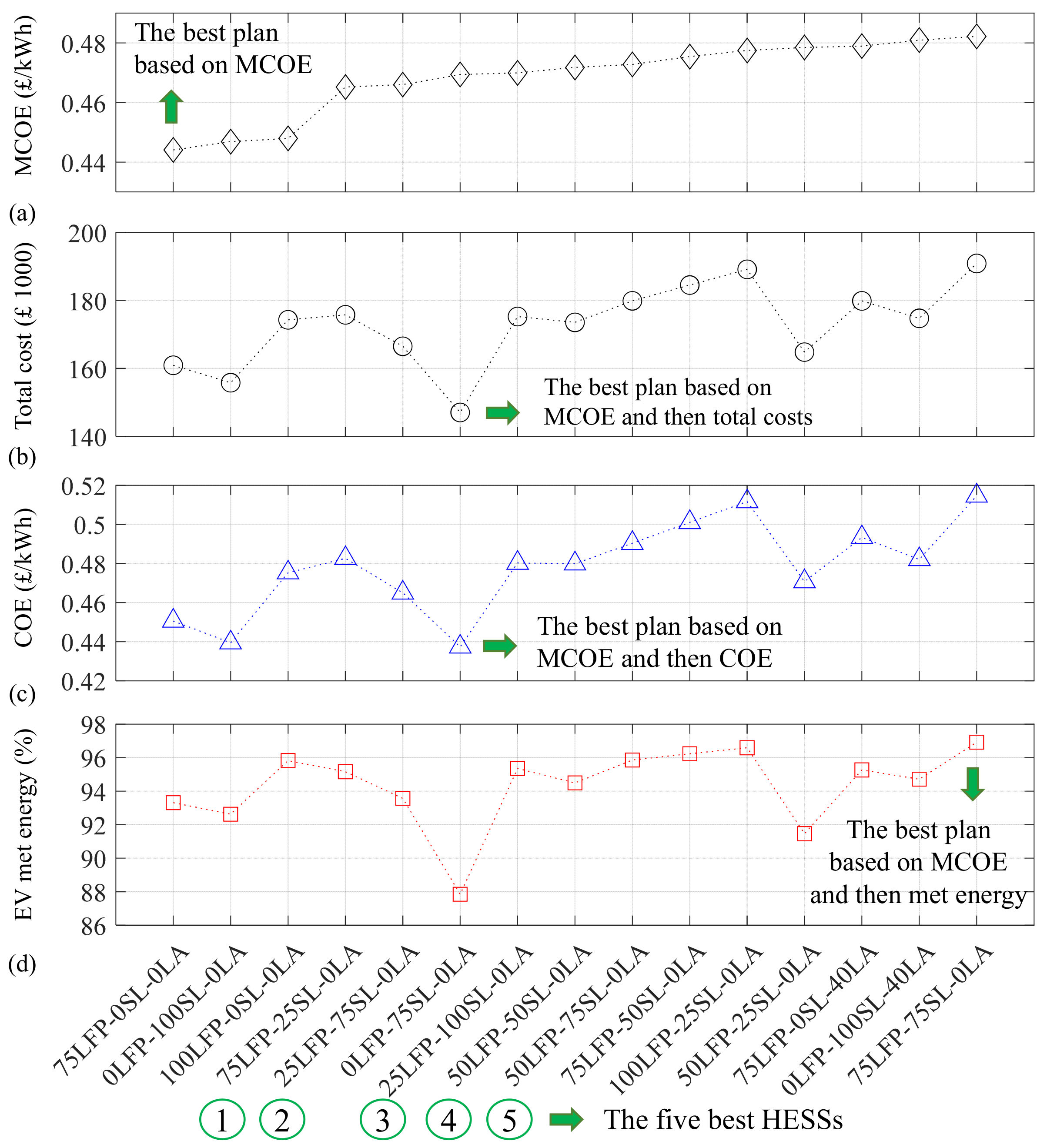
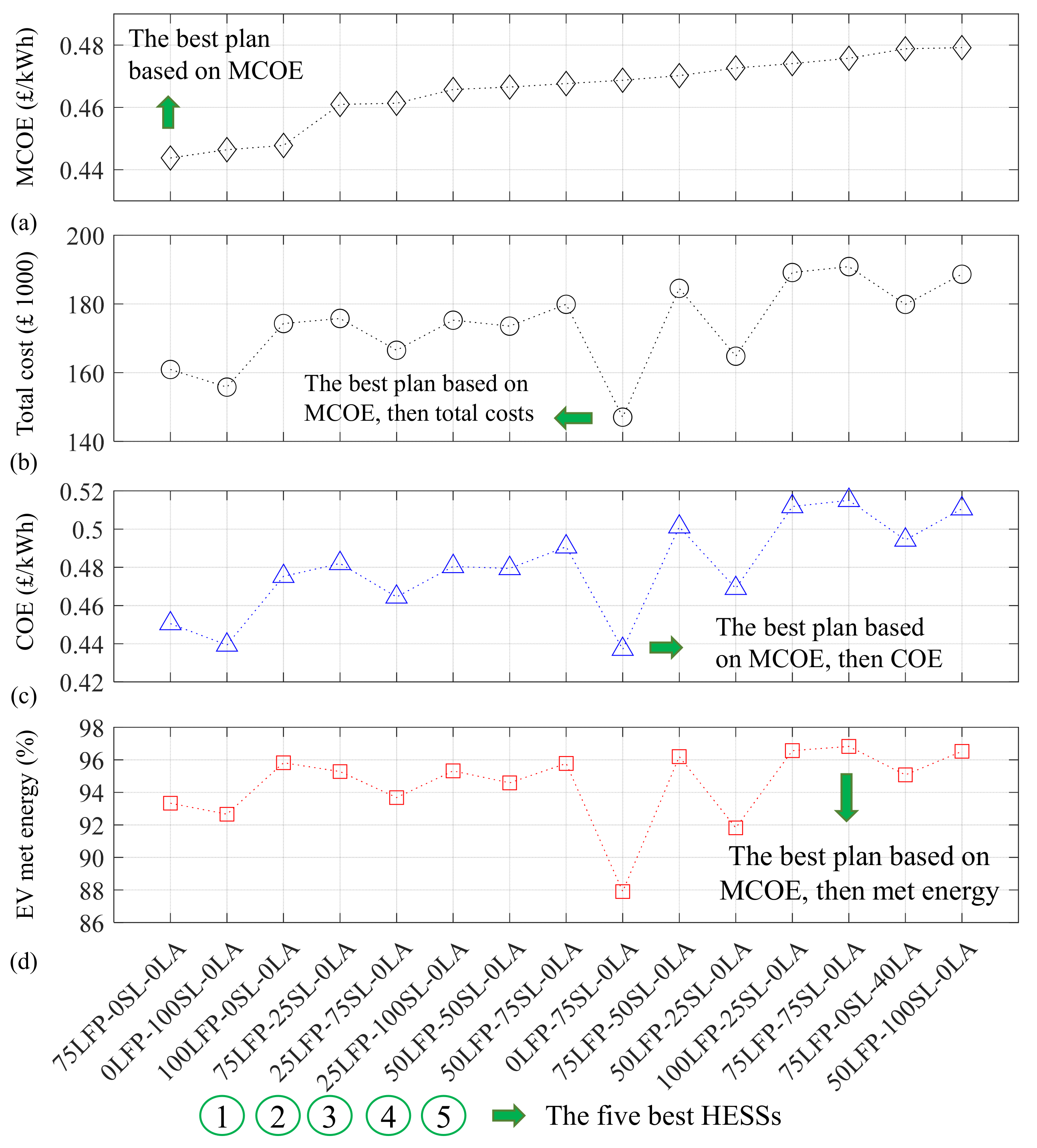
4.4. Techno-Economic Comparison of Best Plans in SAP2
4.4.1. Best Plans Using the Priority-Based EMS
4.4.2. Best Plans Using the Power Sharing-Based EMS
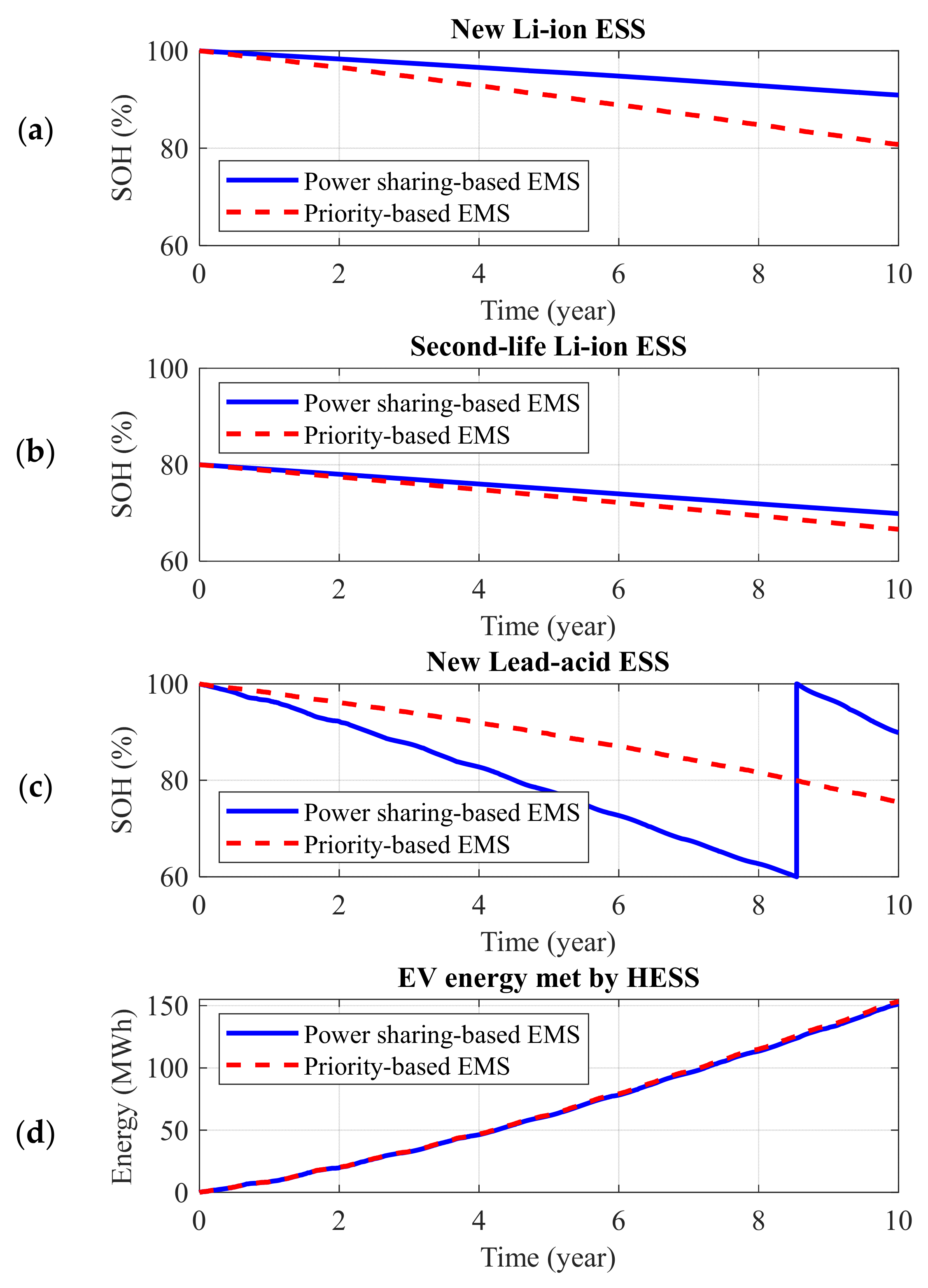
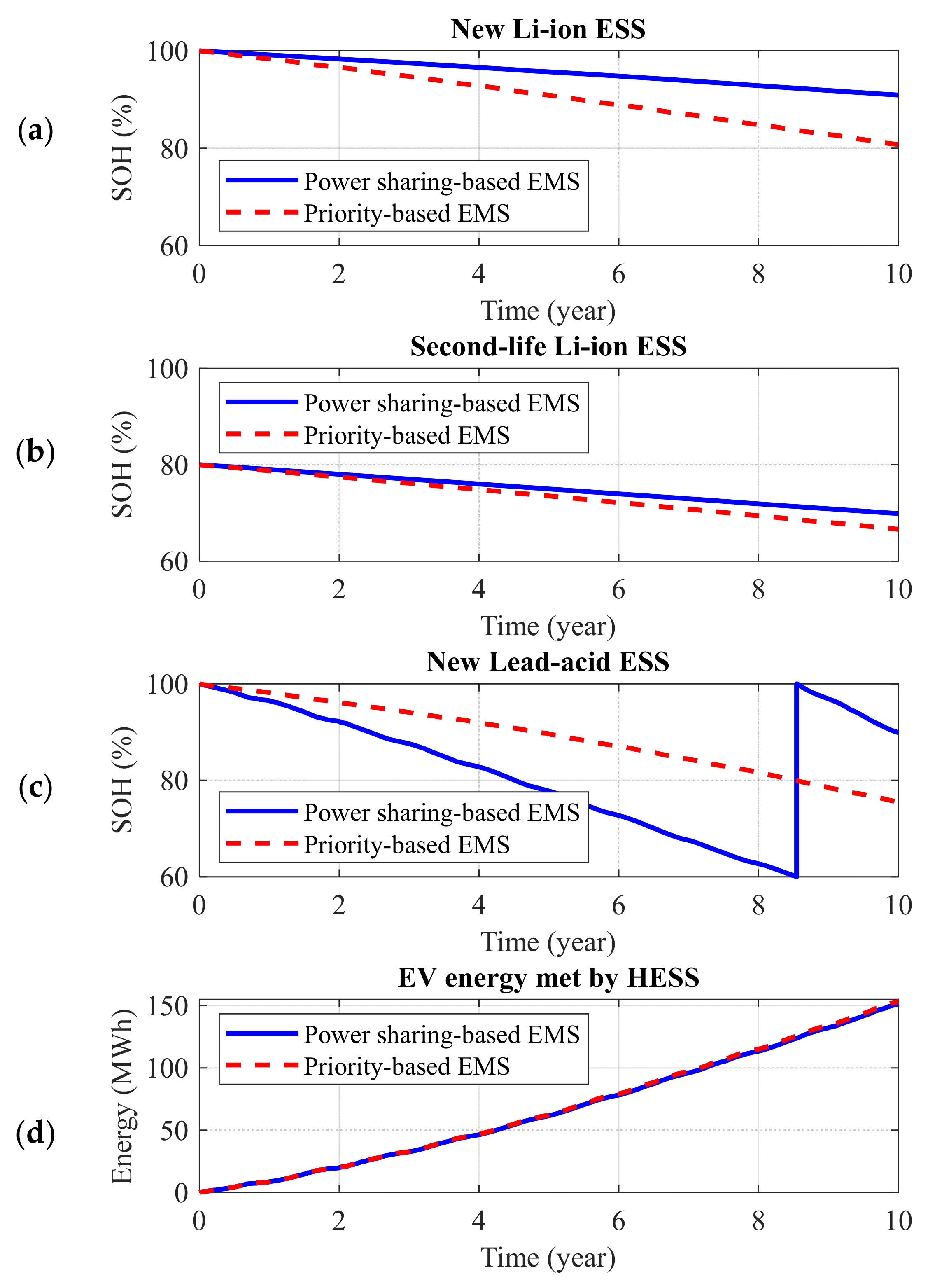
4.4.3. Comparing EMS Strategies for Best HESS Plans
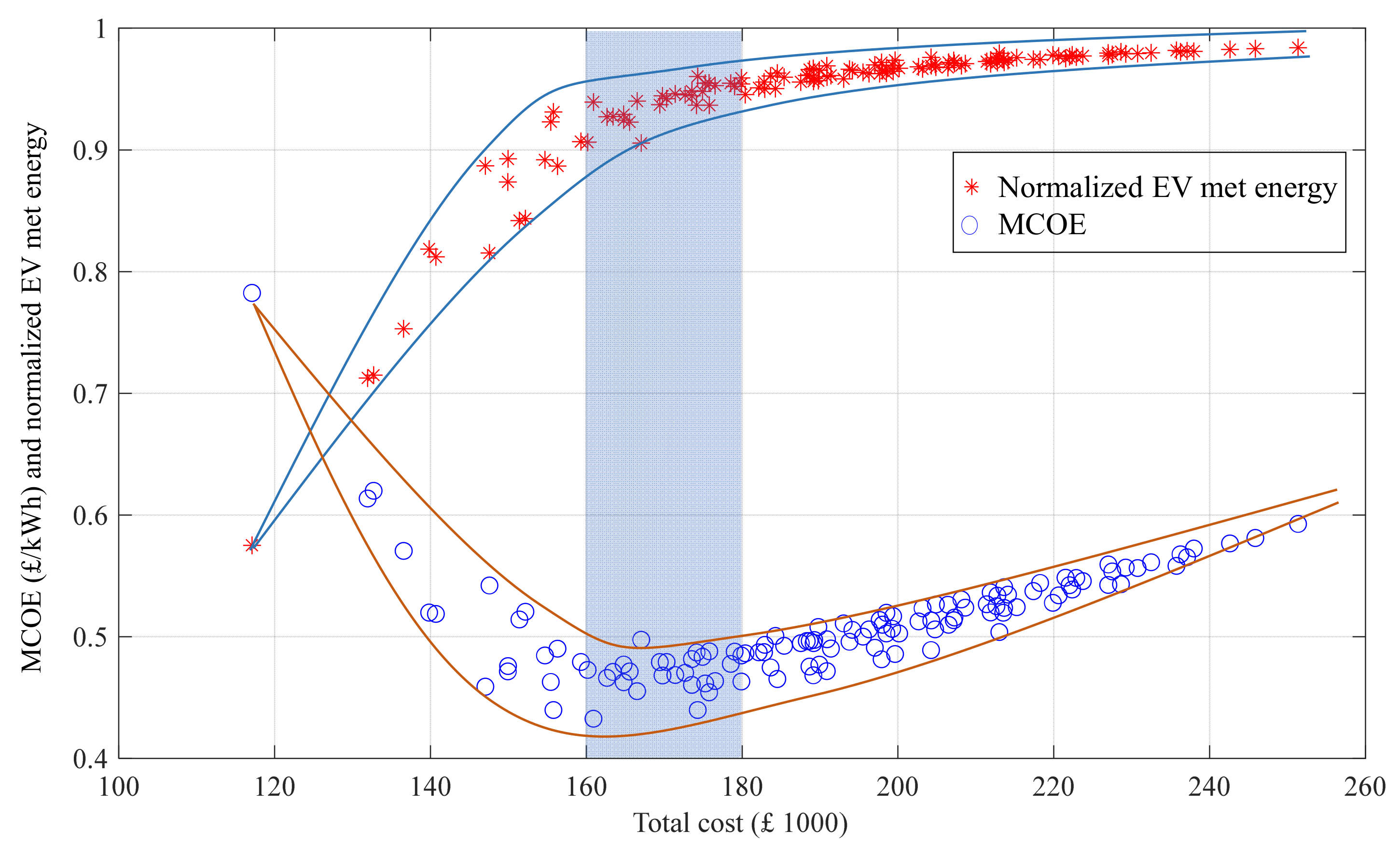
4.4.4. Multi-Objective Decision-Making Constrained by Total Costs
4.5. Limitations and Future Work Potentials
- Uncertainty analysis for the inputs of the model like renewable energies and EV charging station parameters can be performed to study the impact of uncertainties on the planning results.
- Standard requirements for EV charging station availability can be considered as a necessary minimum EV met energy percentage, which is now 99% in the UK [41]. Therefore, the best plans can be found according to the MCOE and other introduced features assuming this constraint.
- Different combinations of existing ESS technologies can be considered to improve the technical features of the HESS and overall MG, e.g., less overall HESS capacity fade, less EV unmet energy demand, and higher energy density. Soluble lead flow batteries can be hybridized with lead–acid and Li-ion batteries.
- Global energy management for HESS plays an important role in ESSs’ SOH and an indirect role in planning features like total costs and cost of energy. Different methods of global energy management can be compared to study their impact on both HESS and MG features and select the best ones.
- Due to the intermittency of renewable energies as the only sources of energy for off-grid EV charging station MGs, it would be valuable to study seasonal long-term storages, e.g., hydrogen storage systems.
- Since ESS technologies and EV charging station infrastructures develop very fast nowadays, considering potential technological advancements in modelling, it would be a good idea to investigate, especially, their impact on economic modelling.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| BMS | Battery management system |
| BOS | Balance of system |
| CAPEX | Capital costs (GBP) |
| CDM | Construction, design, and management |
| COE | Cost of energy (GBP/kWh) |
| DOD | Depth of discharge |
| EMS | Energy management system |
| ESS | Energy storage system |
| EV | Electric vehicle |
| FEVER | Future electric vehicle energy networks supporting renewables |
| HESS | Hybrid energy storage system |
| IT | Information technology |
| LA | Lead acid |
| Li-ion | Lithium-ion |
| MCOE | Modified cost of energy (GBP/kWh) |
| MG | Microgrid |
| OPEX | Operational and maintenance costs |
| PV | Photovoltaic |
| RES | Renewable energy resource |
| SAP | Sensitivity analysis-based planning |
| SOH | State of health (%) |
| SOC | State of health (%) |
| UME | Unmet energy (kWh) |
| WT | Wind turbine |
| ZEV | Zero emissions vehicle |
| Variables: | |
| The EV demand power (kW) | |
| Wind turbine power (kW) | |
| Solar generation power (kW) | |
| Total renewable power (kW) | |
| The generation error power (kW) | |
| The load error power (kW) | |
| ) | The ESS (HESS) scheduled power (kW) |
| () | The ESS (HESS) output power (kW) |
| Mean wind speed at the new height (m/s) | |
| Mean wind speed at the reference height (m/s) | |
| Diffuse irradiance () | |
| Direct irradiance () | |
| Ground-reflected irradiance () | |
| The total irradiance on the inclined plane () | |
| The number of PV panels | |
| The ESS scheduled power after assuming input converter losses (kW) | |
| The allowable power charged/discharged by the ESS (kW) | |
| The allowable rated power of the ESS (kW) | |
| The degraded nominal capacity of the ESS (kWh) | |
| () | Improved allowable rated power during charging (discharging) (kW) |
| () | The cycle (calendar) ageing of the ESS (kWh) |
| () | The charging (discharging) parameter of i-th ESS in power-sharing-based EMS |
| () | The negative (positive) values of the i-th ESS scheduled power (kW) |
| The total costs of a wind turbine (GBP) | |
| () | The initial purchase (installation) costs of a wind turbine (GBP) |
| The replacement cost of a wind turbine (GBP/25 year) | |
| The OPEX cost of a wind turbine (GBP/year) | |
| The blade replacement cost of a wind turbine (GBP/7 year) | |
| The total costs of the solar generation system (GBP) | |
| () | The initial purchase of the PV panels (inverters) (GBP) |
| () | The electrical (structural) PV BOS costs (GBP) |
| The total overhead costs of the PV system (GBP) | |
| The replacement cost of the PV panels (GBP/25 year) | |
| The OPEX cost of the PV panels (GBP/year) | |
| The purchase costs of the EV chargers (GBP) | |
| () | The initial purchase (replacement) costs of each ESS (GBP) |
| The installation costs of each ESS (GBP) | |
| () | The inverter (cabinet) purchase costs for each ESS (GBP) |
| The electrical BOS costs of each ESS (GBP) | |
| The costs of the container for the HESS (GBP) | |
| The total costs of the HESS (GBP) | |
| The estimated CDM costs (GBP) | |
| The total costs of the MG (GBP) | |
| The number of ESSs used in the HESS | |
| The EV unmet energy (kWh) | |
| Constants: | |
| The new height, i.e., hub height of the wind turbine (m) | |
| The reference (measurement) height of the wind speed (m) | |
| Surface roughness length (m) | |
| Converter efficiency (%) | |
| Panel efficiency (%) | |
| Panel dimension | |
| The minimum (maximum) allowable SOC of the ESS (%) | |
| The nominal capacity of the ESS (kWh) | |
| The maximum c-rate of the ESS (kW/kWh) | |
| () | Power converter import (export) loss coefficient in the converter input model |
| () | Power converter import (export) loss coefficient in the converter output model |
| Converter export/import power loss parameter | |
| () | The charging (discharging) loss coefficient of the ESS |
| The charging/discharging loss parameter | |
| The SOH loss parameter of the ESS (%/1000 cycles) | |
| The SOH calendar loss parameter of the ESS (%/month) | |
| The PV panel rated power (kW) | |
| The PV inverter rated power (kW) | |
| () | The unit price of the PV panel (inverter) (GBP) |
| () | The unit price of electrical (structural) PV BOS (GBP/panel) |
| The unit overhead costs of the PV system (GBP/kW) | |
| The OPEX costs of each panel (GBP/year) | |
| () | The unit price for purchasing (installation) the ESS (GBP/kWh) |
| () | The unit price for purchasing each inverter (cabinet) (GBP) |
| The nominal capacity of the cabinet (kWh) | |
| The energy purchase tariff (GBP/kWh) | |
| The sample time of model simulations (s) | |
| The total years under the planning study | |
References
- DfT. Transport Decarbonisation Plan. UK Government. 2021. Available online: https://www.gov.uk/government/publications/transport-decarbonisation-plan (accessed on 15 January 2024).
- DfT. Transport and Environment Statistics 2021 Annual Report. UK Government, May 2021. Available online: https://assets.publishing.service.gov.uk/media/60992fe1e90e0735799d7ed3/transport-and-environment-statistics-2021.pdf (accessed on 15 January 2024).
- DfT. A Zero-Emission Vehicle (ZEV) Mandate and CO2 Emissions Regulation for New Cars and Vans in the UK. UK Government. 2023. Available online: https://www.gov.uk/government/consultations/a-zero-emission-vehicle (accessed on 15 January 2024).
- Mahmud, I.; Medha, M.B.; Hasanuzzaman, M. Global challenges of electric vehicle charging systems and its future prospects: A review. Res. Transp. Bus. Manag. 2023, 49, 101011. [Google Scholar] [CrossRef]
- FEVER. Future Electric Vehicle Energy Networks Supporting Renewables. 2023. Available online: https://www.fever-ev.ac.uk/ (accessed on 15 January 2024).
- Hajipour, E.; Bozorg, M.; Fotuhi-Firuzabad, M. Stochastic Capacity Expansion Planning of Remote Microgrids with Wind Farms and Energy Storage. IEEE Trans. Sustain. Energy 2015, 6, 491–498. [Google Scholar] [CrossRef]
- HOMER Software. Available online: https://www.homerenergy.com/index.html (accessed on 15 January 2024).
- Naderi, M.; Bahramara, S.; Khayat, Y.; Bevrani, H. Optimal planning in a developing industrial microgrid with sensitive loads. Energy Rep. 2017, 3, 124–134. [Google Scholar] [CrossRef]
- Shaaban, M.F.; Mohamed, S.; Ismail, M.; Qaraqe, K.A.; Serpedin, E. Joint planning of smart EV charging stations and DGs in eco-friendly remote hybrid microgrids. IEEE Trans. Smart Grid 2019, 10, 5819–5830. [Google Scholar] [CrossRef]
- Masaud, T.M.; El-Saadany, E. Optimal Battery Planning for Microgrid Applications Considering Battery Swapping and Evolution of the SOH During Lifecycle Aging. IEEE Syst. J. 2023, 17, 4725–4736. [Google Scholar] [CrossRef]
- Masaud, T.M.; El-Saadany, E.F. Correlating optimal size, cycle life estimation, and technology selection of batteries: A two-stage approach for microgrid applications. IEEE Trans. Sustain. Energy 2019, 11, 1257–1267. [Google Scholar] [CrossRef]
- Wu, X.; Zhao, W.; Wang, X.; Li, H. An MILP-based planning model of a photovoltaic/diesel/battery stand-alone microgrid considering the reliability. IEEE Trans. Smart Grid 2021, 12, 3809–3818. [Google Scholar] [CrossRef]
- Hajiaghasi, S.; Salemnia, A.; Hamzeh, M. Hybrid energy storage system for microgrids applications: A review. J. Energy Storage 2019, 21, 543–570. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, X.; Wang, Z.; Ruan, J.; Ma, C.; Song, Z.; Dorrell, D.G.; Pecht, M.G. Hybrid electrochemical energy storage systems: An overview for smart grid and electrified vehicle applications. Renew. Sustain. Energy Rev. 2021, 139, 110581. [Google Scholar] [CrossRef]
- Naderi, M.; Palmer, D.; Munoz, M.N.; Al-Wreikat, Y.; Smith, M.; Fraser, E.; Ballantyne, E.E.F.; Gladwin, D.T.; Foster, M.P.; Stone, D.A. Modelling and sizing sensitivity analysis of a fully renewable energy-based electric vehicle charging station microgrid. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 11–13 June 2024. submitted. [Google Scholar]
- Wang, Y.; Zhang, Y.; Xue, L.; Liu, C.; Song, F.; Sun, Y.; Liu, Y.; Che, B. Research on planning optimization of integrated energy system based on the differential features of hybrid energy storage system. J. Energy Storage 2022, 55, 105368. [Google Scholar] [CrossRef]
- Gao, M.; Han, Z.; Zhang, C.; Li, P.; Wu, D. Optimal configuration for regional integrated energy systems with multi-element hybrid energy storage. Energy 2023, 277, 127672. [Google Scholar] [CrossRef]
- Kebede, A.A.; Coosemans, T.; Messagie, M.; Jemal, T.; Behabtu, H.A.; Van Mierlo, J.; Berecibar, M. Techno-economic analysis of lithium-ion and lead-acid batteries in stationary energy storage application. J. Energy Storage 2021, 40, 102748. [Google Scholar] [CrossRef]
- Esparcia, E.A., Jr.; Castro, M.T.; Odulio, C.M.; Ocon, J.D. A stochastic techno-economic comparison of generation-integrated long duration flywheel, lithium-ion battery, and lead-acid battery energy storage technologies for isolated microgrid applications. J. Energy Storage 2022, 52, 104681. [Google Scholar] [CrossRef]
- Dascalu, A.; Fraser, E.J.; Al-Wreikat, Y.; Sharkh, S.M.; Wills, R.G.; Cruden, A.J. A techno-economic analysis of a hybrid energy storage system for EV off-grid charging. In Proceedings of the IEEE International Conference on Clean Electrical Power (ICCEP), Terrasini, Italy, 27–29 June 2023; pp. 83–90. [Google Scholar] [CrossRef]
- Koh, S.C.; Smith, L.; Miah, J.; Astudillo, D.; Eufrasio, R.M.; Gladwin, D.; Brown, S.; Stone, D. Higher 2nd life Lithium Titanate battery content in hybrid energy storage systems lowers environmental-economic impact and balances eco-efficiency. Renew. Sustain. Energy Rev. 2021, 152, 111704. [Google Scholar] [CrossRef]
- Cicconi, P.; Landi, D.; Morbidoni, A.; Germani, M. Feasibility analysis of second life applications for Li-Ion cells used in electric powertrain using environmental indicators. In Proceedings of the IEEE International Energy Conference and Exhibition (ENERGYCON), Florence, Italy, 9–12 September 2012; pp. 985–990. [Google Scholar] [CrossRef]
- Yang, Y.; Qiu, J.; Zhang, C.; Zhao, J.; Wang, G. Flexible integrated network planning considering echelon utilization of second life of used electric vehicle batteries. IEEE Trans. Transp. Electrif. 2021, 8, 263–276. [Google Scholar] [CrossRef]
- Viswanathan, V.V.; Kintner-Meyer, M. Second use of transportation batteries: Maximizing the value of batteries for transportation and grid services. IEEE Trans. Veh. Technol. 2011, 60, 2963–2970. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, Y.; Luo, F.; Mu, Y. Operational planning of centralized charging stations utilizing second-life battery energy storage systems. IEEE Trans. Sustain. Energy 2020, 12, 387–399. [Google Scholar] [CrossRef]
- Hutchinson, A.J.; Gladwin, D.T. Verification and analysis of a Battery Energy Storage System model. Energy Rep. 2022, 8, 41–47. [Google Scholar] [CrossRef]
- National Statistics: Vehicle Licensing Statistics. UK Gevernment. 2023. Available online: https://www.gov.uk/government/statistics/vehicle-licensing-statistics (accessed on 15 January 2024).
- Photovoltaic Geographical Information System. Available online: https://re.jrc.ec.europa.eu/pvg_tools/en/#TMY (accessed on 15 January 2024).
- Aventa AV-7. Available online: https://en.wind-turbine-models.com/turbines/1529-aventa-av-7 (accessed on 15 January 2024).
- Mathews, I.; Xu, B.; He, W.; Barreto, V.; Buonassisi, T.; Peters, I.M. Technoeconomic model of second-life batteries for utility-scale solar considering calendar and cycle aging. Appl. Energy 2020, 269, 115127. [Google Scholar] [CrossRef]
- Krupp, A.; Beckmann, R.; Diekmann, T.; Ferg, E.; Schuldt, F.; Agert, C. Calendar aging model for lithium-ion batteries considering the influence of cell characterization. J. Energy Storage 2022, 45, 103506. [Google Scholar] [CrossRef]
- Lewerenz, M.; Münnix, J.; Schmalstieg, J.; Käbitz, S.; Knips, M.; Sauer, D.U. Systematic aging of commercial LiFePO4| Graphite cylindrical cells including a theory explaining rise of capacity during aging. J. Power Sources 2017, 345, 254–263. [Google Scholar] [CrossRef]
- SD6 Wind Turbine. Available online: https://sd-windenergy.com/small-wind-turbines/sd6-6kw-wind-turbine/ (accessed on 15 January 2024).
- Rogers, D.; Gladwin, D.; Stone, D.; Strickland, D.; Foster, M. Willenhall energy storage system: Europe’s largest research-led lithium titanate battery. IET Eng. Technol. Ref. 2017. [Google Scholar] [CrossRef]
- Statista—UK Electric Vehicles. Available online: https://www.statista.com/outlook/mmo/electric-vehicles/united-kingdom#units (accessed on 15 January 2024).
- Li-Ion Batteries. Available online: https://www.solartradesales.co.uk/solar-pv-batteries (accessed on 15 January 2024).
- Lead-Acid Batteries. Available online: https://www.amazon.co.uk/SuperBatt-LM110-Leisure-Battery-Motorhome/dp/B00Q8N66B0 (accessed on 15 January 2024).
- Energy Storage System Inverters. Available online: https://www.tradesparky.com/solarsparky/inverters (accessed on 15 January 2024).
- Solar Panels. Available online: https://www.energian.co.uk/collections/solar-panels (accessed on 15 January 2024).
- Solar Inverters. Available online: https://eco-angels.uk/brand/xsolax/ (accessed on 15 January 2024).
- The Public Charge Point Regulations. Available online: https://www.legislation.gov.uk/ukdsi/2023/9780348249873/regulation/7 (accessed on 15 January 2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ESS Parameters (Unit) | Parameter Name | New Li-Ion ESS | Second-Life Li-Ion ESS | New Lead–Acid ESS |
|---|---|---|---|---|
| Charging/discharging loss (%) | 3 | 7 | 15 | |
| Converter import/export loss (%) | 3 | 3 | 3 | |
| Maximum C-rate | 1 | 1 | 0.6 | |
| SOC low limit (%) | 20 | 20 | 50 | |
| SOC high limit (%) | 100 | 80 | 100 | |
| Initial SOC (%) | 60 | 60 | 60 | |
| SOH loss per 1000 cycles (%) | 4.5 | 4.5 | 61.5 | |
| SOH calendar loss per month (%) | 0.125 | 0.125 | 0.125 | |
| End of life (%) | 40 | 40 | 60 |
| Number of Wind Turbines | Number of Solar Panels | ESS Nominal Capacity (kWh) |
|---|---|---|
| 0, 1, 2 | 20, 30, 40, 50, 60, 70 | 50, 100, 150, 200, 250, 300, 350 |
| New Li-Ion ESS Nominal Capacity (kWh) | Second-Life Li-Ion ESS Nominal Capacity (kWh) | New Lead–Acid ESS Nominal Capacity (kWh) |
|---|---|---|
| 0, 25, 50, 75, 100 | 0, 25, 50, 75, 100 | 0, 40, 80, 120, 150 |
| Item | Cost | Item | Cost |
|---|---|---|---|
| Wind turbine (each) [33] | Energy storage system | ||
| Purchasing | GBP 33,000 | Purchasing a new modular Li-ion battery [36] | GBP 335/kWh |
| Installation | GBP 5000 | Purchasing a second-life modular Li-ion battery | GBP 150/kWh |
| Operation and maintenance | GBP 500/year | Purchasing a new modular lead–acid battery [37] | GBP 83/kWh |
| Replacement | GBP 30,000/25 years | Inverter (50 kW) [38] | GBP 3000/inverter |
| Blade repl. | GBP 3000/7 years | Installation | GBP 80/kWh |
| Solar energy generation system | Cabinet | GBP 600/42 kWh | |
| Panel (405 W) [39] | GBP 122.5/panel | Container 20 ft (40 ft) | GBP2500 (4000) |
| Inverter (15 kW) [40] | GBP 2400/inverter | Electrical BOS (in total) | GBP 3000 |
| Structural BOS | GBP 30/panel | EV charger | |
| Electrical BOS | GBP 80/panel | Charger (7 kW) | GBP 1500/charger |
| Overhead | GBP 0.22/W | CDM costs | GBP 20,000 |
| Operation and maintenance | GBP 20/panel/year | ||
| Replacement | GBP 150/panel | ||
| ESS Technology | Best Plan | MCOE (GBP/kWh) | Total Cost (GBP) | COE (GBP/kWh) | Met Energy (%) | SOH (%) |
|---|---|---|---|---|---|---|
| New Li-ion | 1WT-50PV-100kWh | 0.436 | 169,100 | 0.467 | 94.6 | 86.4 |
| Second-life Li-ion | 1WT-60PV-100kWh | 0.445 | 155,800 | 0.438 | 93.0 | 68.9 |
| New lead–acid | 1WT-60PV-150kWh | 0.507 | 167,900 | 0.478 | 91.6 | 67.1 * |
| Best HESS Plans | EMS | MCOE (GBP/kWh) | COE (GBP/kWh) | EV Met Energy (%) | HESS SOH (%) |
|---|---|---|---|---|---|
| 75LFP-25SL-0LA | Priority-based | 0.465 | 0.483 | 95.2 | 83.7-67.1-NA |
| Power sharing | 0.461 | 0.482 | 95.3 | 88-68.8-NA | |
| 25LFP-75SL-0LA | Priority-based | 0.466 | 0.465 | 93.6 | 77.3-66.5-NA |
| Power sharing | 0.461 | 0.464 | 93.7 | 89.4-68.9-NA | |
| 25LFP-100SL-0LA | Priority-based | 0.470 | 0.480 | 95.4 | 77.3-67.5-NA |
| Power sharing | 0.466 | 0.480 | 95.3 | 91.4-70-NA | |
| 50LFP-50SL-0LA | Priority-based | 0.471 | 0.479 | 94.5 | 80.8-66.6-NA |
| Power sharing | 0.466 | 0.479 | 94.6 | 89.1-68.9-NA | |
| 50LFP-75SL-0LA | Priority-based | 0.472 | 0.458 | 95.8 | 80.8-67.4-NA |
| Power sharing | 0.467 | 0.453 | 95.8 | 91.4-69.9-NA |
| Nominal Capacity (kWh) | Total Cost (GBP) | EV Met Energy (%) | MCOE (GBP/kWh) | New Li-Ion SOH (%) | Second-Life Li-Ion SOH (%) | New Lead–Acid SOH (%) | ||
|---|---|---|---|---|---|---|---|---|
| New Li-Ion | Second-Life Li-Ion | New Lead–Acid | ||||||
| 75 | 0 | 0 | 160,900 | 93.3 | 0.44 | 83.9 | - | - |
| 50 | 25 | 0 | 164,800 | 91.8 | 0.47 | 85.8 | 67.4 | - |
| 0 | 75 | 40 | 166,000 | 92.1 | 0.48 | - | 68.7 | 76.8 * |
| 25 | 75 | 0 | 166,500 | 93.7 | 0.46 | 89.4 | 68.9 | - |
| 50 | 0 | 40 | 168,900 | 91.7 | 0.49 | 83.6 | - | 61.1 * |
| 50 | 50 | 0 | 173,500 | 94.6 | 0.46 | 89.1 | 68.9 | - |
| 100 | 0 | 0 | 174,300 | 95.8 | 0.45 | 86.1 | - | - |
| 0 | 100 | 40 | 174,700 | 94.3 | 0.48 | - | 69.9 | 87.3 * |
| 25 | 100 | 0 | 175,300 | 95.3 | 0.46 | 91.4 | 70 | - |
| 75 | 25 | 0 | 175,800 | 95.3 | 0.46 | 88 | 68.8 | - |
| 0 | 75 | 80 | 176,400 | 94 | 0.49 | - | 69.6 | 86.5 * |
| 50 | 0 | 80 | 179,300 | 94.3 | 0.49 | 86 | - | 72 * |
| 75 | 0 | 40 | 179,800 | 95.1 | 0.48 | 86 | - | 73.1 * |
| 50 | 75 | 0 | 179,900 | 95.8 | 0.46 | 91.4 | 70 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naderi, M.; Palmer, D.; Smith, M.J.; Ballantyne, E.E.F.; Stone, D.A.; Foster, M.P.; Gladwin, D.T.; Khazali, A.; Al-Wreikat, Y.; Cruden, A.; et al. Techno-Economic Planning of a Fully Renewable Energy-Based Autonomous Microgrid with Both Single and Hybrid Energy Storage Systems. Energies 2024, 17, 788. https://doi.org/10.3390/en17040788
Naderi M, Palmer D, Smith MJ, Ballantyne EEF, Stone DA, Foster MP, Gladwin DT, Khazali A, Al-Wreikat Y, Cruden A, et al. Techno-Economic Planning of a Fully Renewable Energy-Based Autonomous Microgrid with Both Single and Hybrid Energy Storage Systems. Energies. 2024; 17(4):788. https://doi.org/10.3390/en17040788
Chicago/Turabian StyleNaderi, Mobin, Diane Palmer, Matthew J. Smith, Erica E. F. Ballantyne, David A. Stone, Martin P. Foster, Daniel T. Gladwin, Amirhossein Khazali, Yazan Al-Wreikat, Andrew Cruden, and et al. 2024. "Techno-Economic Planning of a Fully Renewable Energy-Based Autonomous Microgrid with Both Single and Hybrid Energy Storage Systems" Energies 17, no. 4: 788. https://doi.org/10.3390/en17040788
APA StyleNaderi, M., Palmer, D., Smith, M. J., Ballantyne, E. E. F., Stone, D. A., Foster, M. P., Gladwin, D. T., Khazali, A., Al-Wreikat, Y., Cruden, A., & Fraser, E. (2024). Techno-Economic Planning of a Fully Renewable Energy-Based Autonomous Microgrid with Both Single and Hybrid Energy Storage Systems. Energies, 17(4), 788. https://doi.org/10.3390/en17040788