
Interval State Estimation of Electricity-Gas Systems Considering Measurement Correlations


Abstract
1. Introduction
- (1)
- The derived linear model for measurements of electricity-gas systems transfers the nonlinear electricity-gas system model into the measurements-based linear model, describing the statistical characteristics of state variables in the nonlinear system through linear equations and converting them into measurements.
- (2)
- The constructed interval state matrix and the linear equations of state estimation interval consider the correlation between measurements in the electricity-gas system (including the correlation between pressure at node and gas mass flow in the gas network, the correlation between active power and reactive power in the electricity system), and establish the electricity-gas system state estimation model containing these correlations.
- (3)
- The proposed method for determining the range of state estimation interval allows the existence of measurement correlations, has a certain tolerance for measurement correlations, and provides the ideal distribution range of state variables under various measurement correlations.
2. The Linearized Model for Measuring Electricity-Gas Systems
2.1. The Gas Pipeline System Model
2.2. The Electricity System Model
2.3. The Derivation of Linear Measurement Model for the Electricity-Gas Systems
3. The Construction of State Matrix and Linear Equations of State Estimation Interval Considering Measurement Correlations
3.1. The Calculation of Measurement Variance-Covariance Matrix with Measurement Correlations
3.2. Constructing the State Matrix and Linear Equations of State Estimation Interval Considering Measurement Correlations
4. Determining the Range of State Estimation Intervals with Measurement Correlations
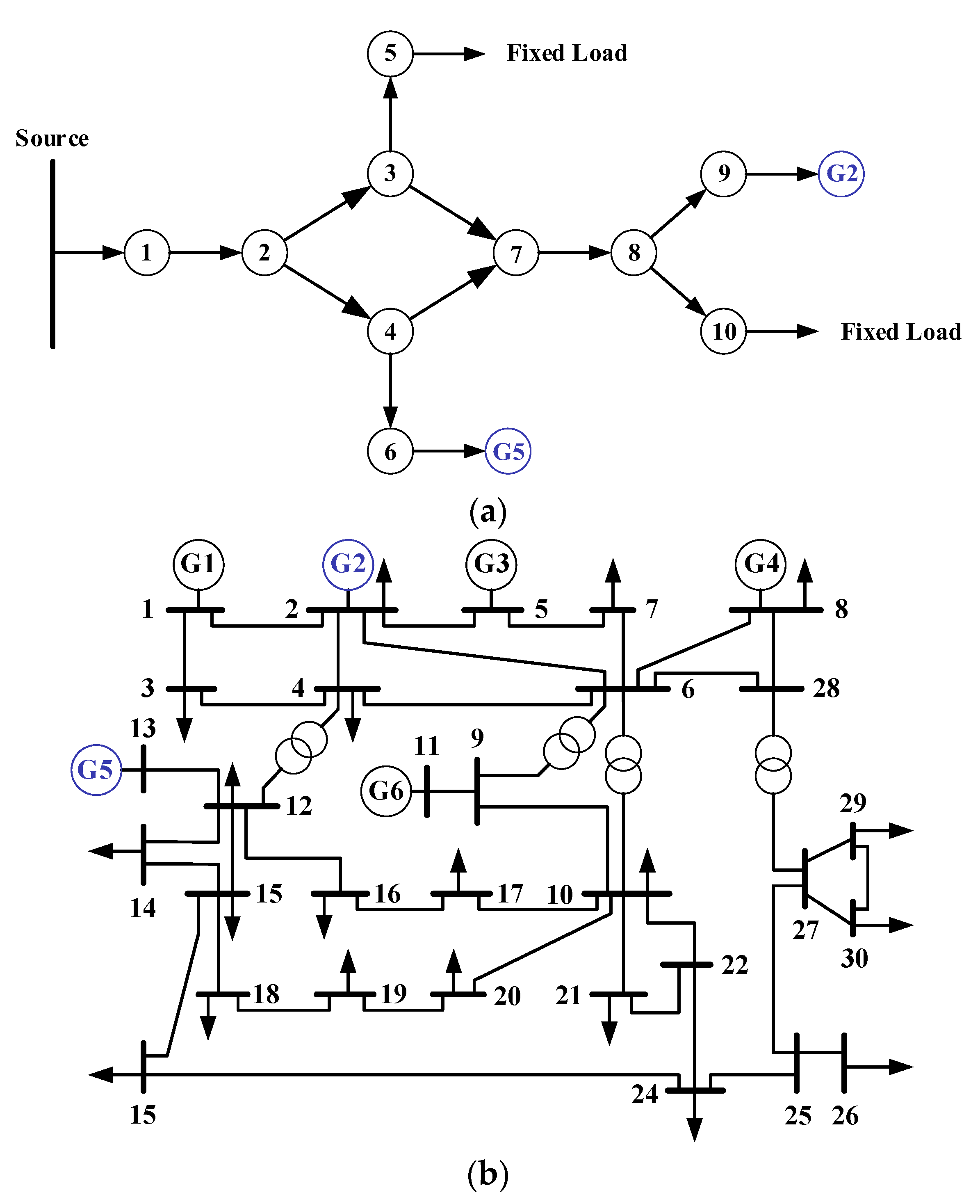
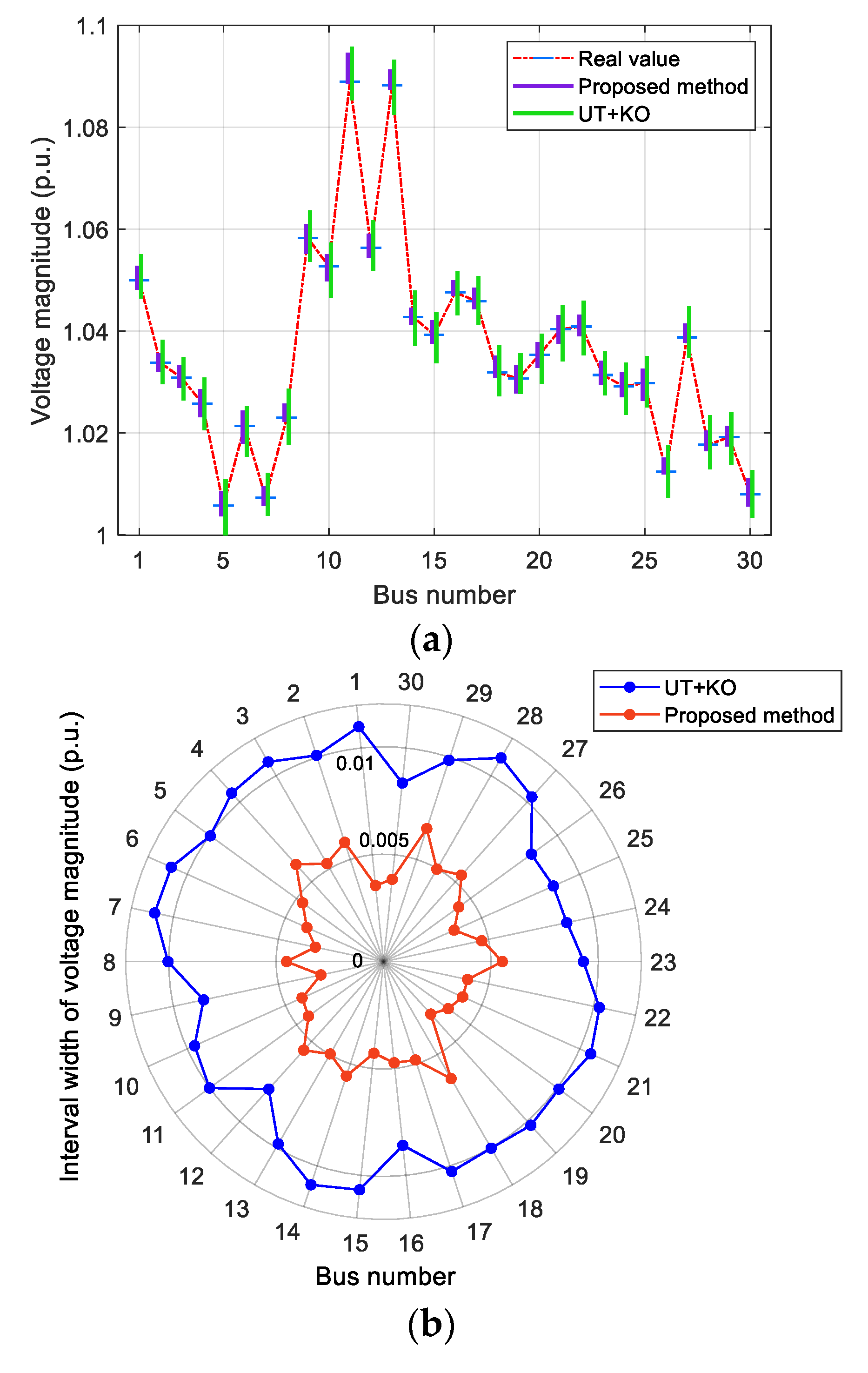
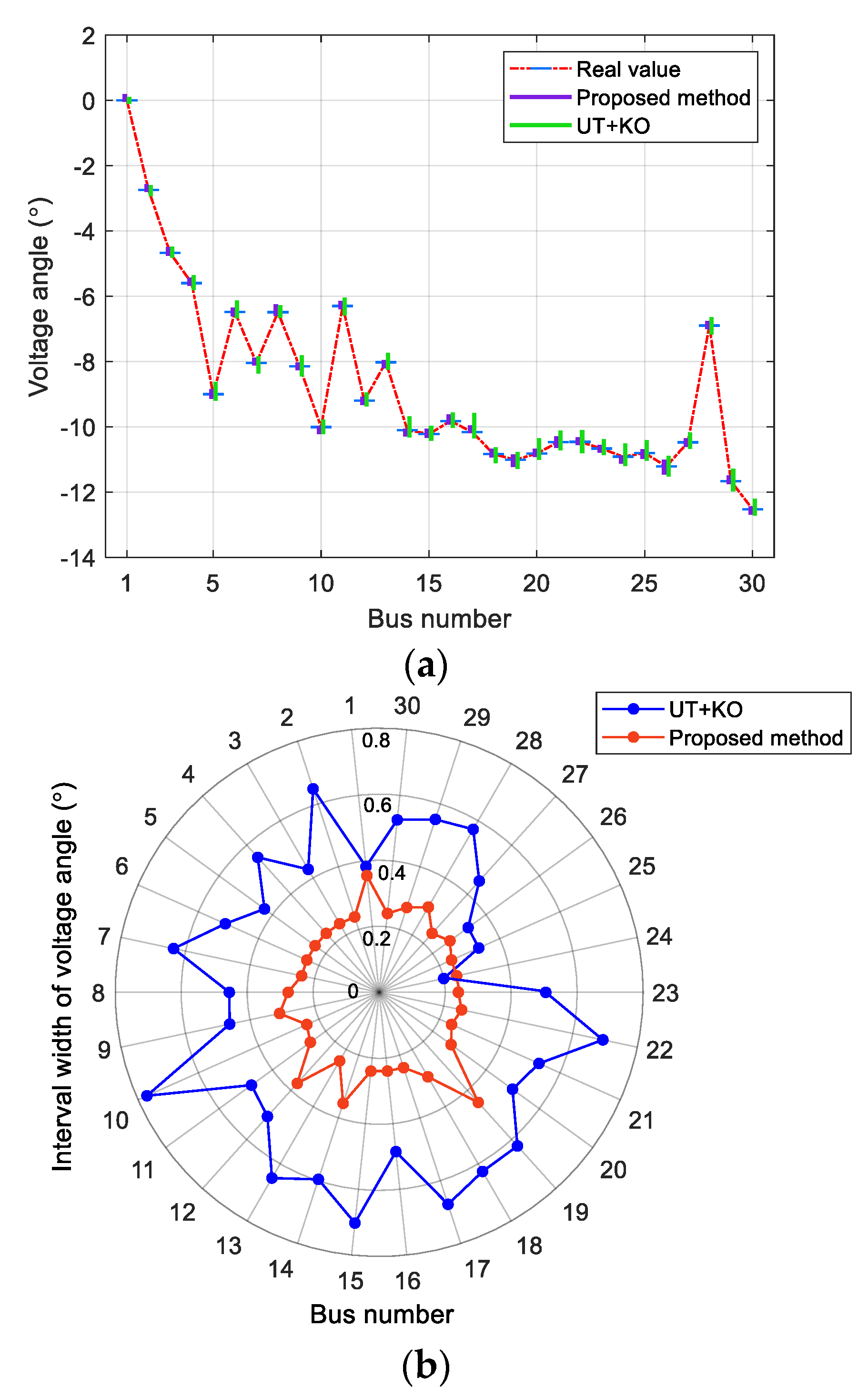
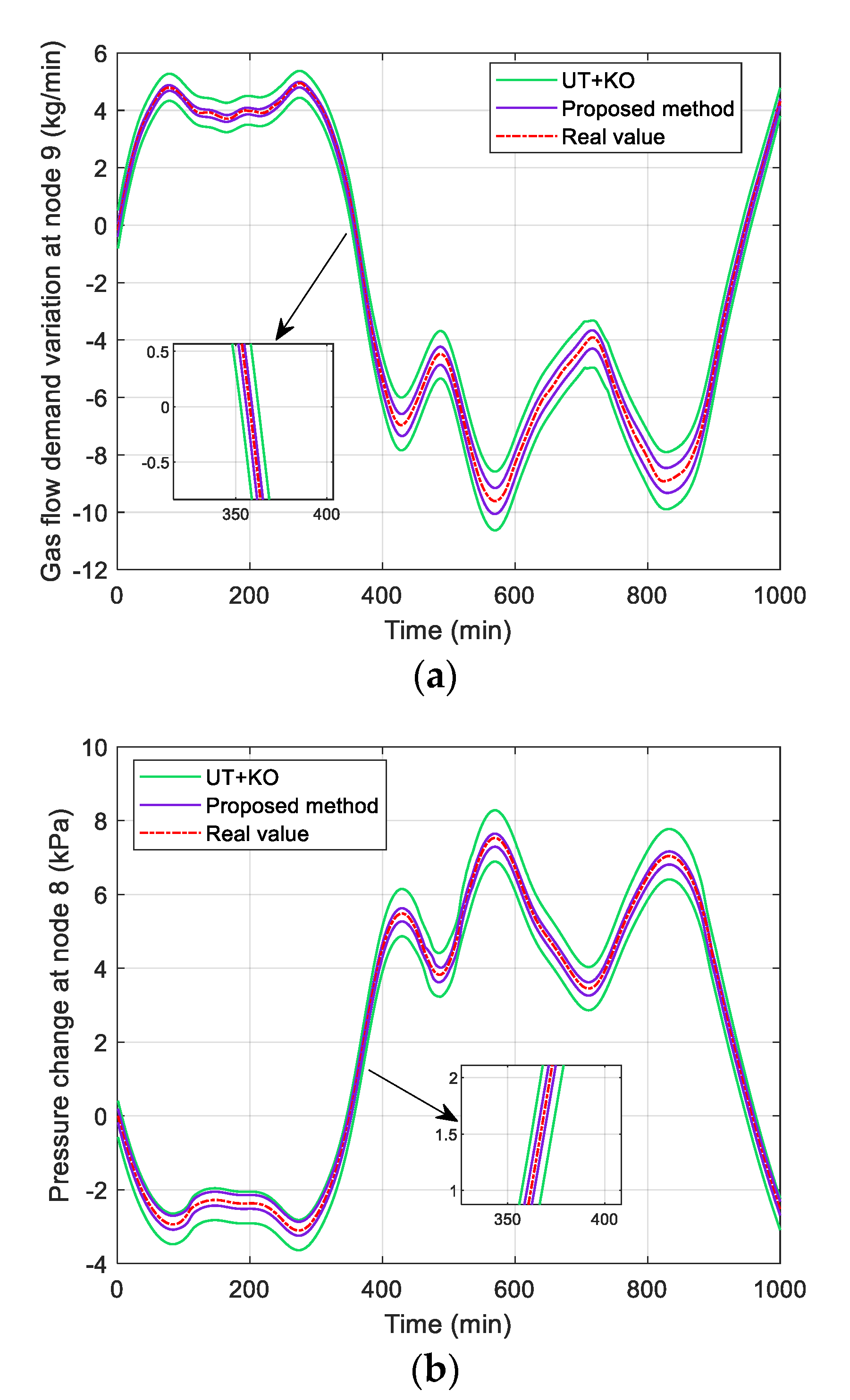
5. Case Studies
5.1. Case 1: The Correlation Coefficient between Measurements and and the Correlation Coefficient between Measurements and Are Set to 0.15
5.2. Case 2: The Correlation Coefficient between Measurements and and the Correlation Coefficient between Measurements and Are Set to 0.3
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, Y.; Ren, Z.; Yang, X. A steady-state energy flow analysis method for integrated natural gas and power systems based on topology decoupling. Appl. Energy 2022, 306, 118007. [Google Scholar] [CrossRef]
- Aminifar, F.; Shahidehpour, M.; Fotuhi-Firuzabad, M. Power system dynamic state estimation with synchronized phasor measurements. IEEE Trans. Instrum. Meas. 2013, 63, 352–363. [Google Scholar] [CrossRef]
- Muscas, C.; Pau, M.; Pegoraro, P.A. Effects of measurements and pseudomeasurements correlation in distribution system state estimation. IEEE Trans. Instrum. Meas. 2014, 63, 2813–2823. [Google Scholar] [CrossRef]
- Santhosh, K.C.; Rajawat, K.; Chakrabarti, S. Robust distribution system state estimation with hybrid measurements. IET Gener. Transm. Distrib. 2020, 14, 3250–3259. [Google Scholar] [CrossRef]
- Caro, E.; Conejo, A.J.; Minguez, R. Multiple bad data identification considering measurement dependencies. IEEE Trans. Power Syst. 2011, 26, 1953–1961. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, S.; Mili, L. A robust state estimation framework considering measurement correlations and imperfect synchronization. IEEE Trans. Power Syst. 2018, 33, 4604–4613. [Google Scholar] [CrossRef]
- Singh, A.K.; Pal, B.C. Decentralized dynamic state estimation in power systems using unscented transformation. IEEE Trans. Power Syst. 2013, 29, 794–804. [Google Scholar] [CrossRef]
- Caro, E.; Valverde, G. Impact of transformer correlations in state estimation using the unscented transformation. IEEE Trans. Power Syst. 2013, 29, 368–376. [Google Scholar] [CrossRef]
- Zhao, J. Power system dynamic state estimation considering measurement correlations. IEEE Trans. Energy Conver. 2017, 32, 1630–1632. [Google Scholar] [CrossRef]
- Zanni, L.; Le Boudec, J.Y.; Cherkaoui, R. A prediction-error covariance estimator for adaptive Kalman filtering in step-varying processes: Application to power-system state estimation. IEEE Trans. Contr. Syst. Technol. 2016, 25, 1683–1697. [Google Scholar] [CrossRef]
- Lu, Z.; Gong, D.; Sun, Y. A New State Updating Approach in Power System Dynamic State Estimation Considering Correlated Measurements. In Proceedings of the 2017 Eighth International Conference on Intelligent Control and Information Processing (ICICIP), Hangzhou, China, 3–5 November 2017. [Google Scholar]
- Lu, Z.; Wei, Z.; Sun, Y. Power system dynamic state estimation considering correlation of measurement error from PMU and SCADA. Concurr. Comp.-Pract. Exp. 2019, 31, e4726. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, W.; Min, Y. Projected unscented Kalman filter for dynamic state estimation and bad data detection in power system. In Proceedings of the 2017 Iet International Conference on Developments in Power System Protection, Copenhagen, Denmark, 31 March–3 April 2014. [Google Scholar]
- Chakhchoukh, Y.; Vittal, V.; Heydt, G.T. PMU based state estimation by integrating correlation. IEEE Trans. Power Syst. 2013, 29, 617–626. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, G.; Dong, Z.Y. Robust forecasting aided power system state estimation considering state correlations. IEEE Trans. Smart Grid. 2016, 9, 2658–2666. [Google Scholar] [CrossRef]
- Chakhchoukh, Y.; Vittal, V.; Heydt, G.T. LTS-based robust hybrid SE integrating correlation. IEEE Trans. Power Syst. 2016, 32, 3127–3135. [Google Scholar] [CrossRef]
- Lu, Z.; Yang, S.H.; Yang, S. Mixed measurement-based power system state estimation with measurement correlation. In 2016 Advances in Power and Energy Engineering: Proceedings of the 8th Asia-Pacific Power and Energy Engineering Conference; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Caro, E.; Conejo, A.J.; Minguez, R. Power system state estimation considering measurement dependencies. IEEE Trans. Power Syst. 2009, 24, 1875–1885. [Google Scholar] [CrossRef]
- Abedi, B.; Ghadimi, A.A.; Abolmasoumi, A.H. An improved TPM-based distribution network state estimation considering loads/DERs correlations. Electr. Eng. 2021, 103, 1541–1553. [Google Scholar] [CrossRef]
- Valverde, G.; Saric, A.T.; Terzija, V. Stochastic monitoring of distribution networks including correlated input variables. IEEE Trans. Power Syst. 2012, 28, 246–255. [Google Scholar] [CrossRef]
- Thorley, A.; Tiley, C.H.; Terzija, V. Unsteady and transient flow of compressible fluids in pipelines—A review of theoretical and some experimental studies. Int. J. Heat Fluid Flow. 1987, 8, 3–15. [Google Scholar] [CrossRef]
- Osiadacz, A. Simulation of transient gas flows in networks. Int. J. Numer. Methods Fluids 1984, 4, 13–24. [Google Scholar] [CrossRef]
- Abur, A.; Exposito, A.G.; Sun, Y. Power System State Estimation: Theory and Implementation; CRC Press: Boca Raton, FL, USA, 2004; pp. 79–93. [Google Scholar]
- Sheikhi, A.; Bahrami, S.; Ranjbar, A.M. An autonomous demand response program for electricity and natural gas networks in smart energy hubs. Energy 2015, 89, 490–499. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Zhang, N. A data-driven approach to linearize power flow equations considering measurement noise. IEEE Trans. Smart Grid. 2019, 11, 2576–2587. [Google Scholar] [CrossRef]
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. MATPOWER: Steady-state operations, planning, and analysis tools for power systems research and education. IEEE Trans. Power Syst. 2010, 26, 12–19. [Google Scholar] [CrossRef]
- Xu, X.; Jia, H.; Chiang, H.D. Dynamic modeling and interaction of hybrid natural gas and electricity supply system in microgrid. IEEE Trans. Power Syst. 2014, 30, 1212–1221. [Google Scholar] [CrossRef]
- Xu, J.; Wu, Z.; Dou, X. An interval arithmetic-based state estimation for unbalanced active distribution networks. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017. [Google Scholar]
- D’Antona, G. Power system static-state estimation with uncertain network parameters as input data. IEEE Trans. Instrum. Meas. 2016, 65, 2485–2494. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Value | Term | Value | Term | Value |
|---|---|---|---|---|---|
| Z | 0.9 | R | 500 J/(kg·K−1) | T | 278 K |
| Node | Gas Injection (kg/s) | Pressure (MPa) |
|---|---|---|
| 5 | −16.3 | 3.01 |
| 6 | −11.8 | 3.04 |
| 9 | −13.2 | 2.86 |
| 10 | −18.7 | 2.93 |
| Number | From | To | L (km) | f | d (m) | Mass Flow (kg/s) |
|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 10 | 0.01 | 0.5 | 60 |
| 2 | 2 | 3 | 20 | 0.012 | 0.4 | 34.6 |
| 3 | 2 | 4 | 15 | 0.011 | 0.45 | 25.4 |
| 4 | 3 | 5 | 10 | 0.01 | 0.5 | 16.3 |
| 5 | 3 | 7 | 15 | 0.011 | 0.45 | 18.3 |
| 6 | 4 | 6 | 10 | 0.01 | 0.5 | 11.8 |
| 7 | 4 | 7 | 20 | 0.012 | 0.4 | 13.6 |
| 8 | 7 | 8 | 5 | 0.01 | 0.4 | 31.9 |
| 9 | 8 | 9 | 5 | 0.01 | 0.4 | 13.2 |
| 10 | 8 | 10 | 5 | 0.01 | 0.4 | 18.7 |
| Accuracy Indices | |||||
|---|---|---|---|---|---|
| Proposed method | Gas flow demand variation at node 9: | 0.3964 | 0.4541 | 0.5391 | 0.9308 |
| UT+KO | 0.8070 | 0.9681 | 1.2772 | 2.0476 | |
| Proposed method | Pressure change at node 8: | 0.2749 | 0.3516 | 0.3704 | 0.6096 |
| UT+KO | 0.7523 | 0.7846 | 0.8961 | 1.3971 | |
| Proposed method | Voltage magnitude of IEEE 30-bus system: | 0.0046 | 0.0065 | 0.0084 | 0.0143 |
| UT+KO | 0.0099 | 0.0110 | 0.0161 | 0.0176 | |
| Proposed method | Voltage angle of IEEE 30-bus: | 0.371 | 0.4486 | 0.4055 | 0.5495 |
| UT+KO | 0.527 | 0.7703 | 0.8143 | 1.0329 | |
| Method | Average Execution Time (s) | |
|---|---|---|
| Proposed method | 2.68 | 3.41 |
| UT+KO | 43.59 | 54.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Feng, L. Interval State Estimation of Electricity-Gas Systems Considering Measurement Correlations. Energies 2024, 17, 755. https://doi.org/10.3390/en17030755
Huang Y, Feng L. Interval State Estimation of Electricity-Gas Systems Considering Measurement Correlations. Energies. 2024; 17(3):755. https://doi.org/10.3390/en17030755
Chicago/Turabian StyleHuang, Yan, and Lin Feng. 2024. "Interval State Estimation of Electricity-Gas Systems Considering Measurement Correlations" Energies 17, no. 3: 755. https://doi.org/10.3390/en17030755
APA StyleHuang, Y., & Feng, L. (2024). Interval State Estimation of Electricity-Gas Systems Considering Measurement Correlations. Energies, 17(3), 755. https://doi.org/10.3390/en17030755