
A Modular Step-Up DC/DC Converter for Electric Vehicles


Abstract
1. Introduction
- ▪
- The modular structure can control stacks of FCs to increase the energy harvested by improving the maximum power extraction. This happens at shared voltage and current stresses across the semiconductor devices of the SMs.
- ▪
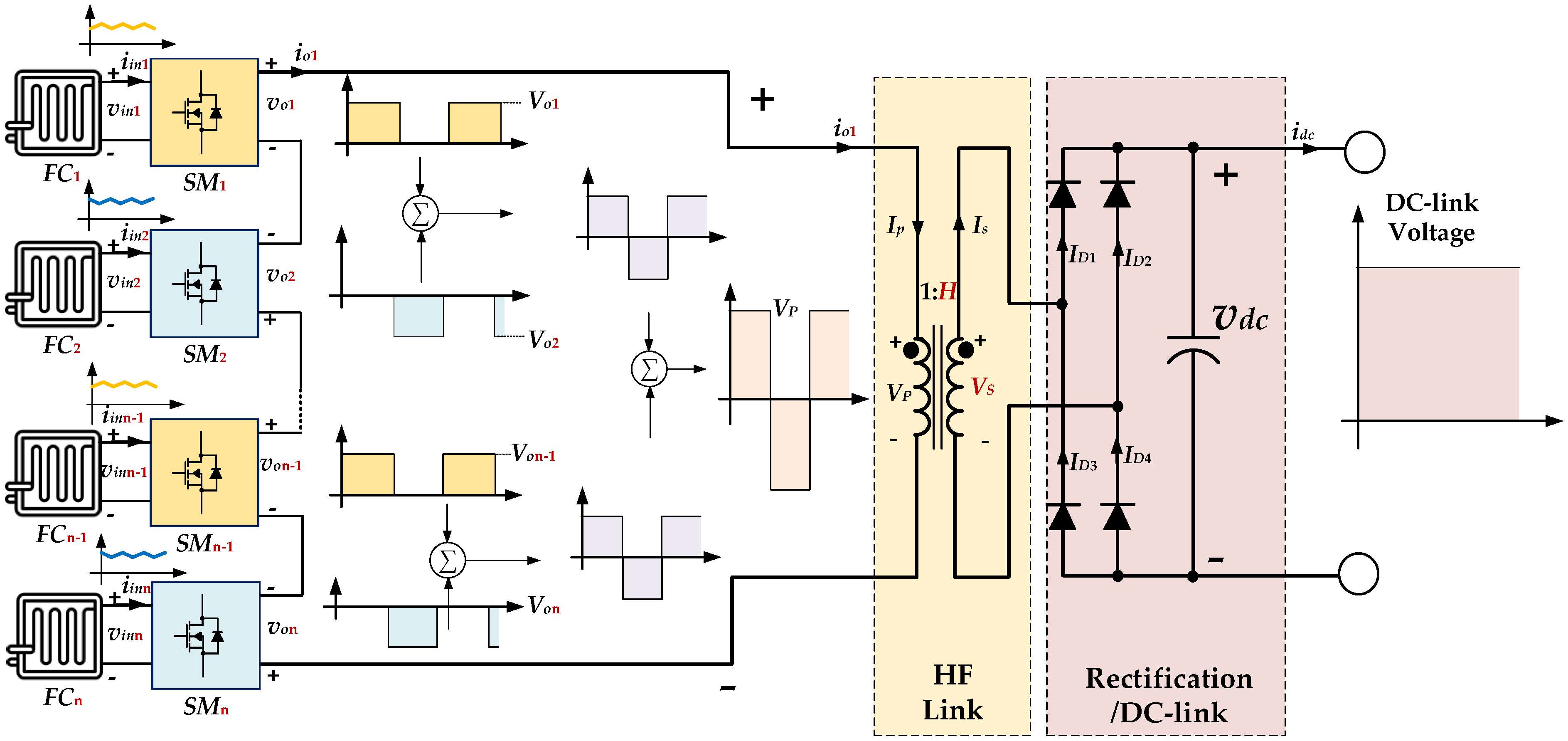
- The output terminals of the boosting SMs are connected in series in a complimentary PWM operation to provide a high voltage-boosting ratio at reduced output voltage and current ripples.
- ▪
- The topology of the boosting SMs is chosen so to have a minimal input current ripple to improve the performance of the FCs.
- ▪
- Each SM allows for isolation with a high-frequency transformer (HFT) or coupling inductors to provide additional voltage boosting.
- ▪
- The proposed topology has an improved fault-ride-through (FRT) capability in case of partial failures.
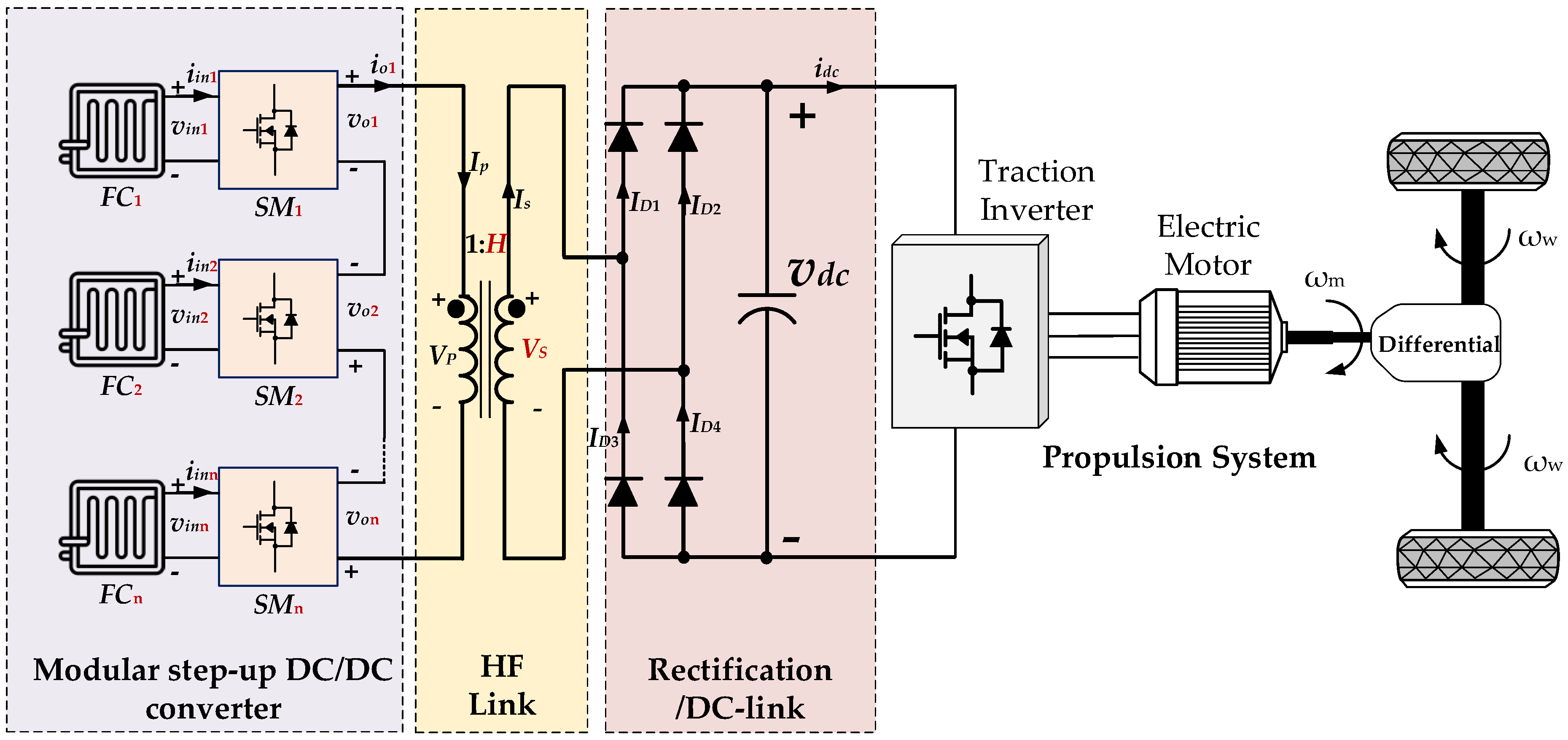
2. System Description
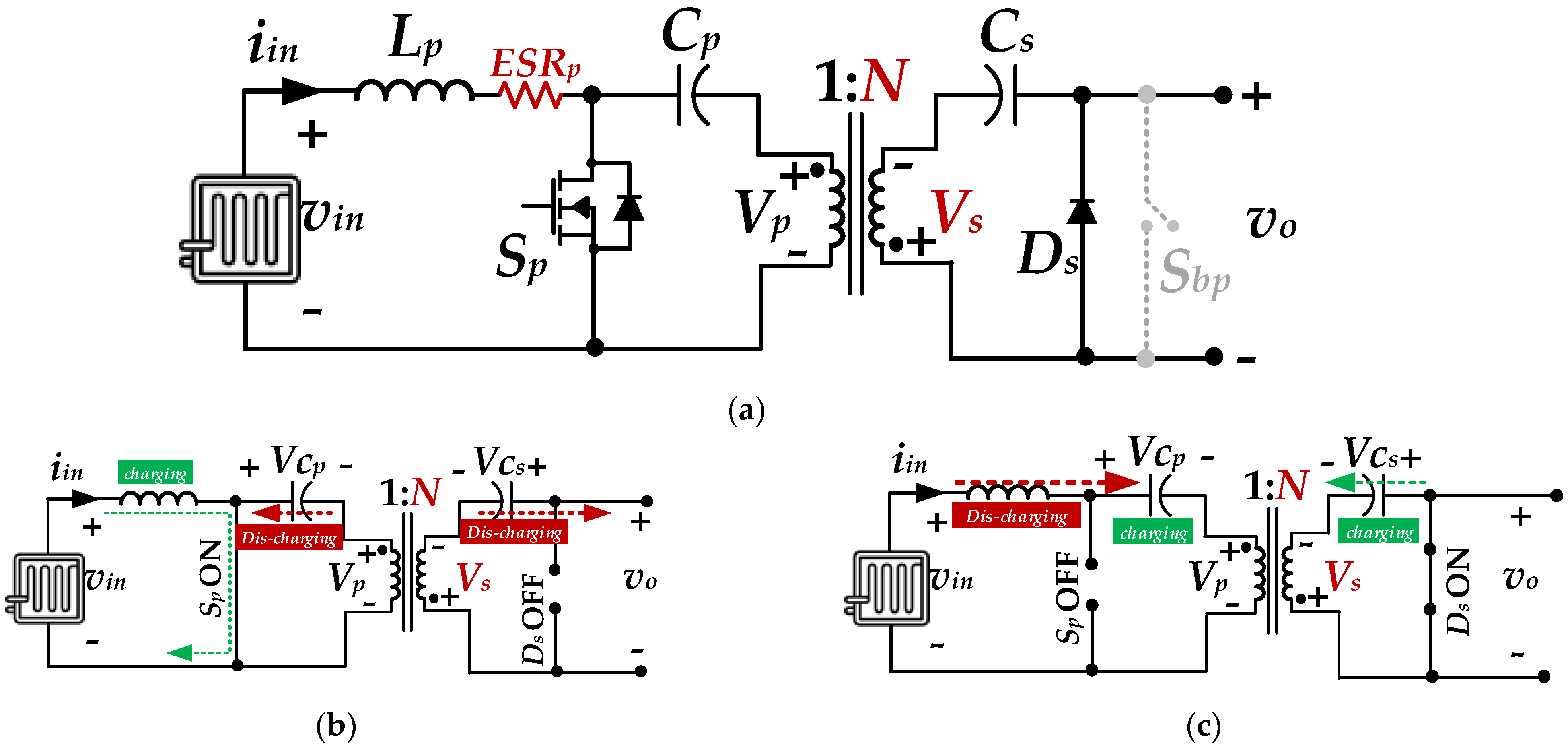
3. SM Topology
4. Computer Simulations
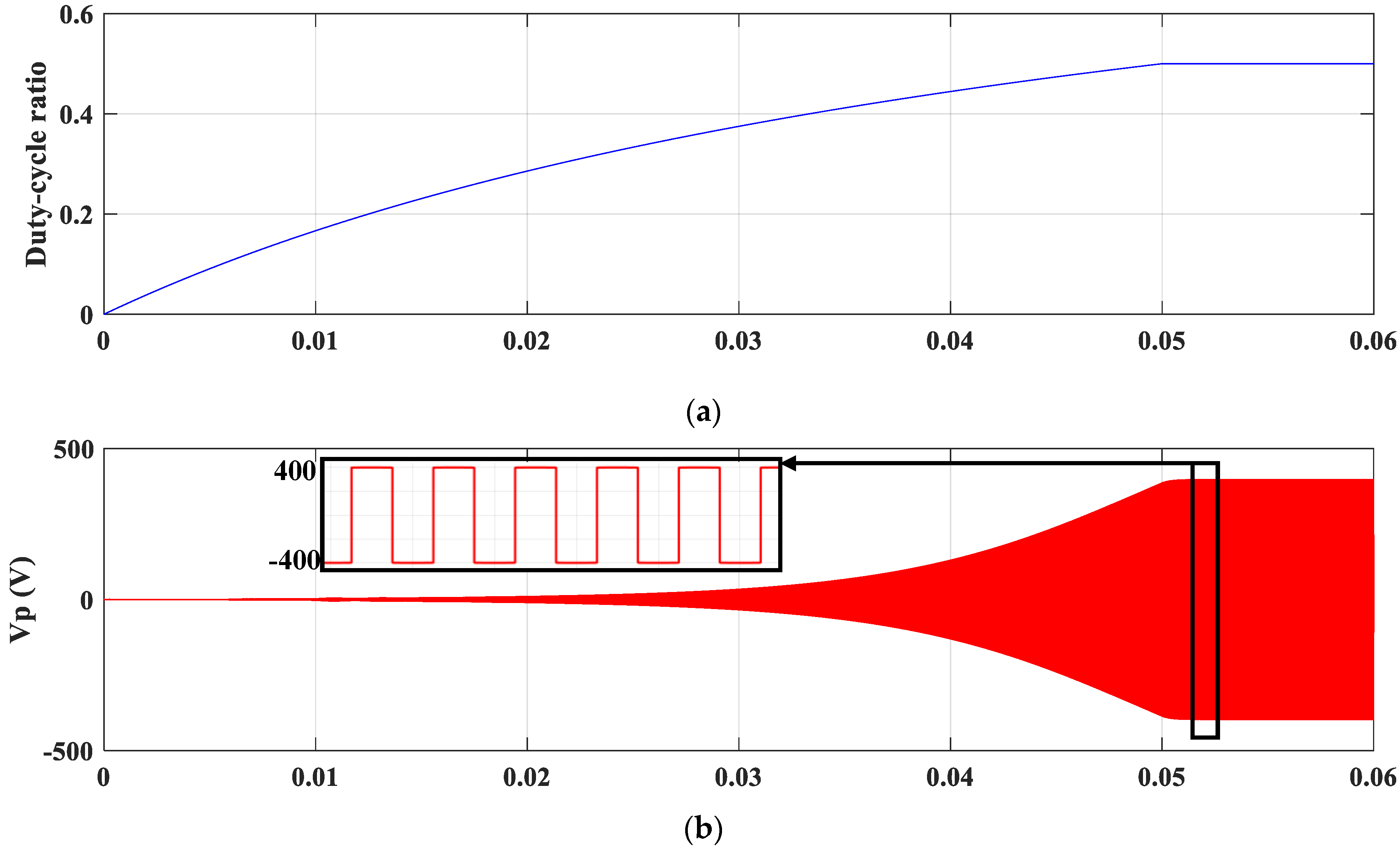
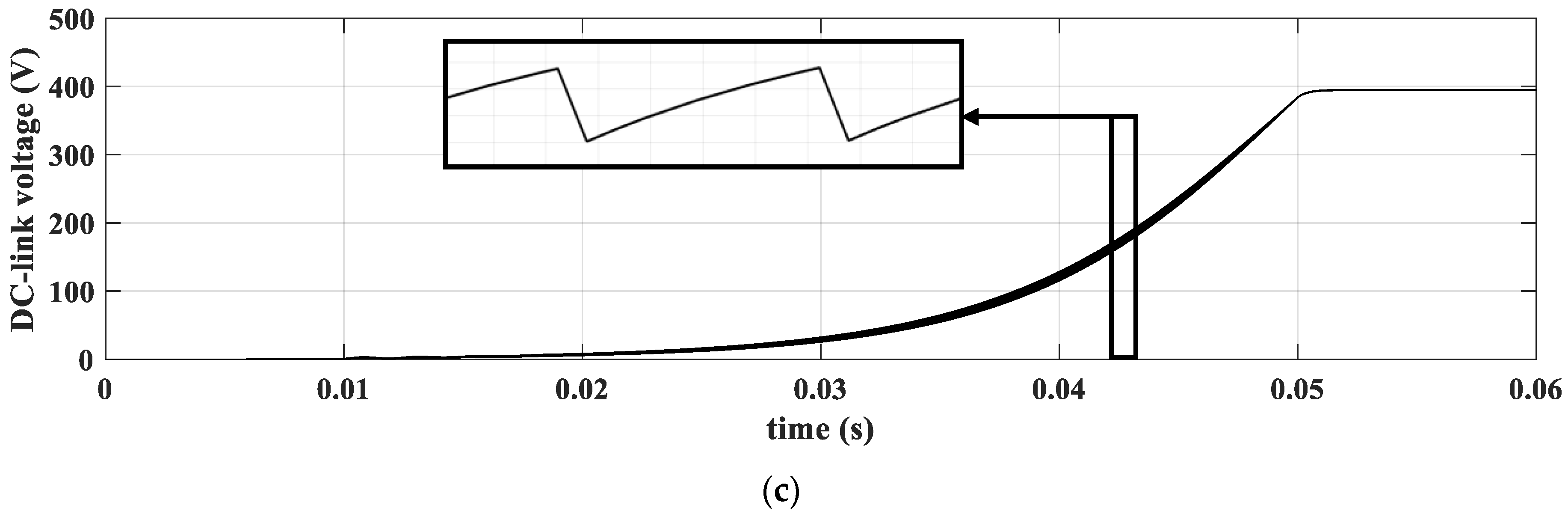
4.1. Warming Up (Building the DC-Link Voltage)
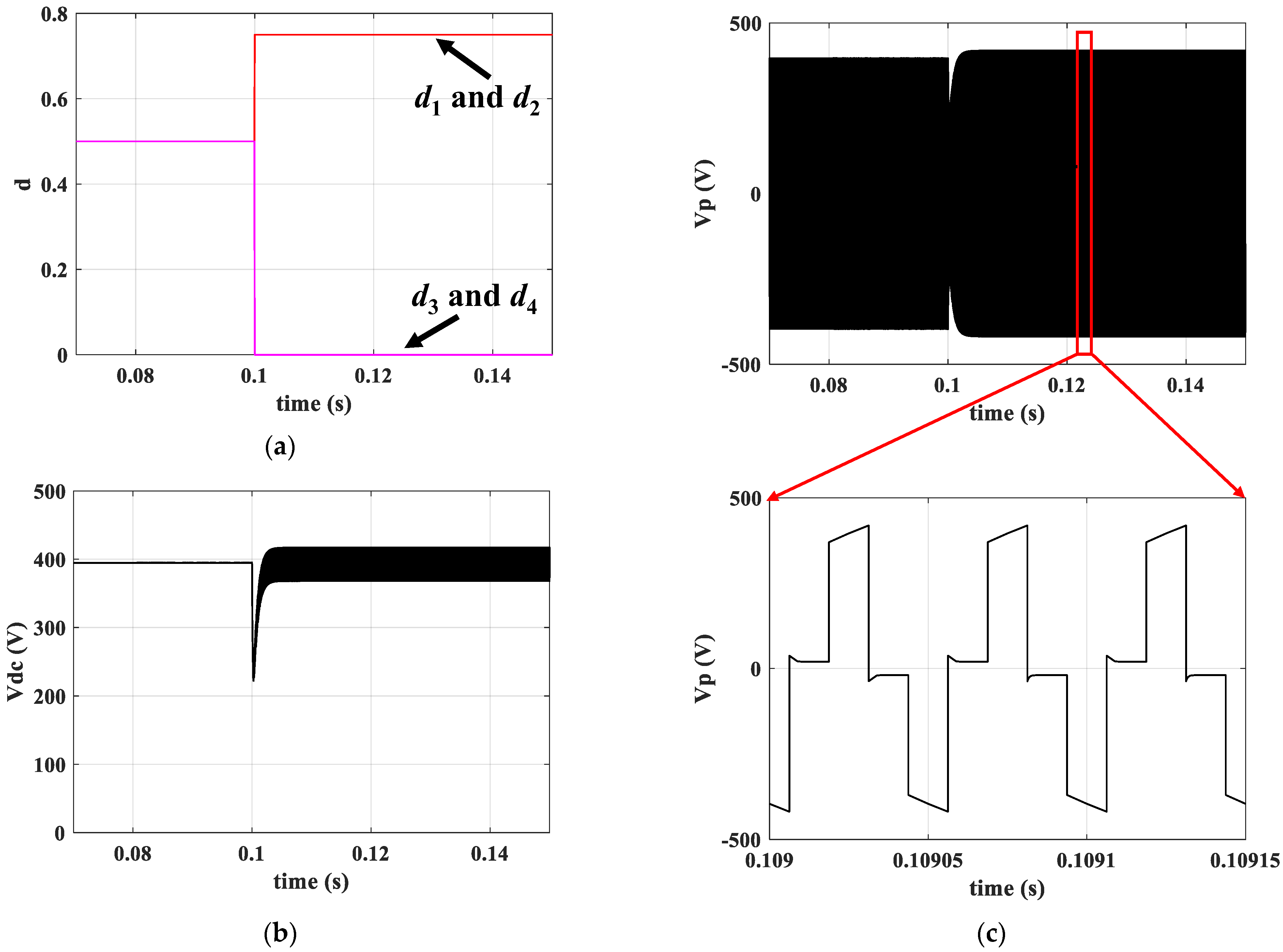
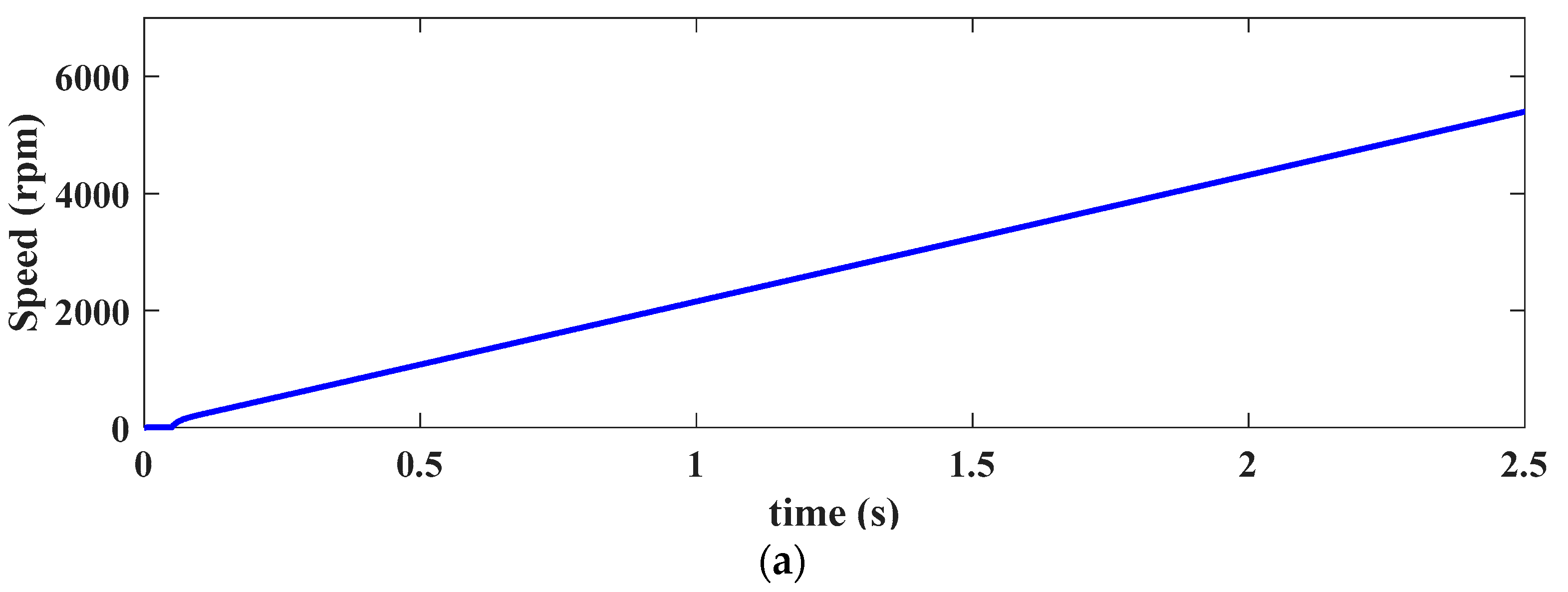
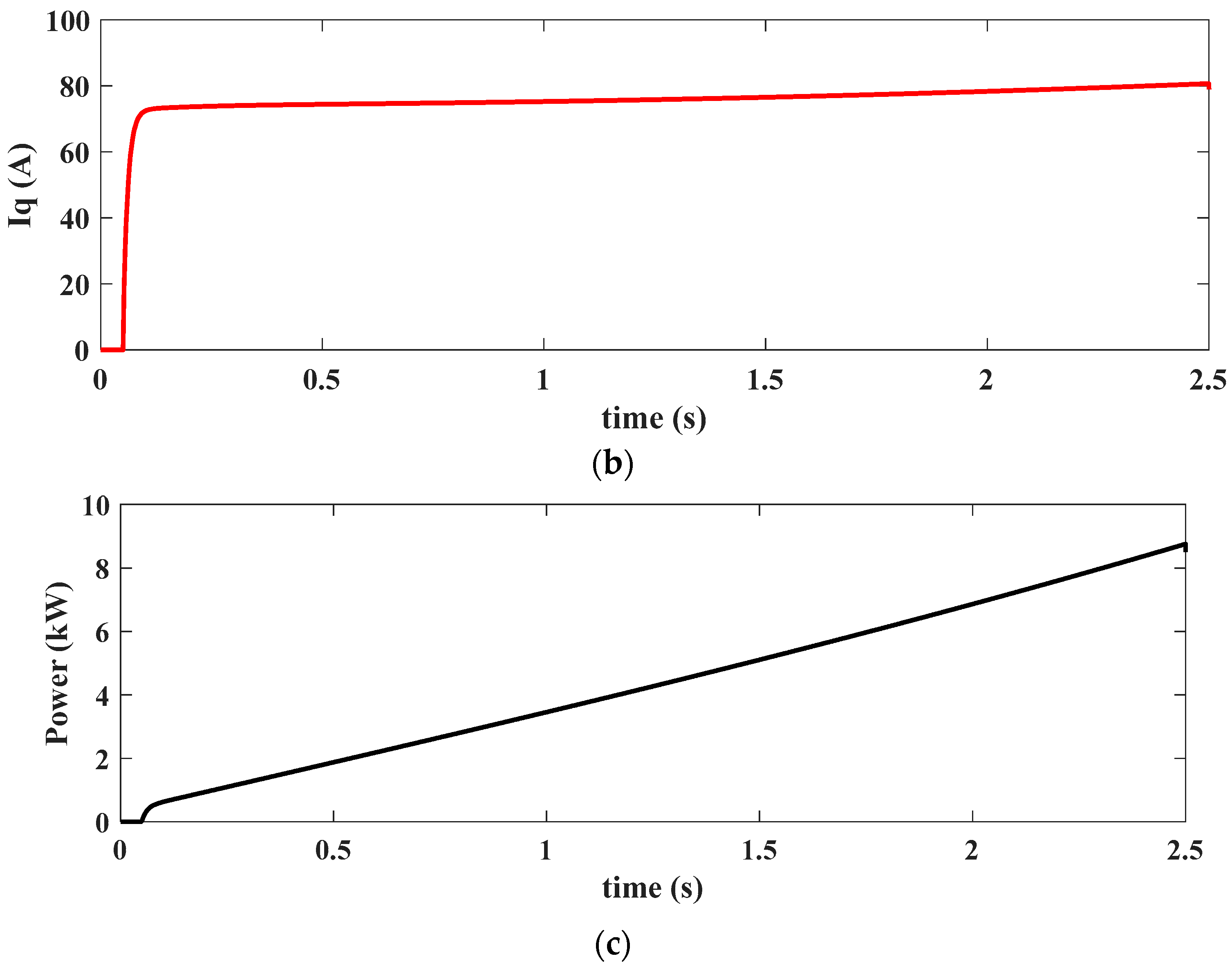
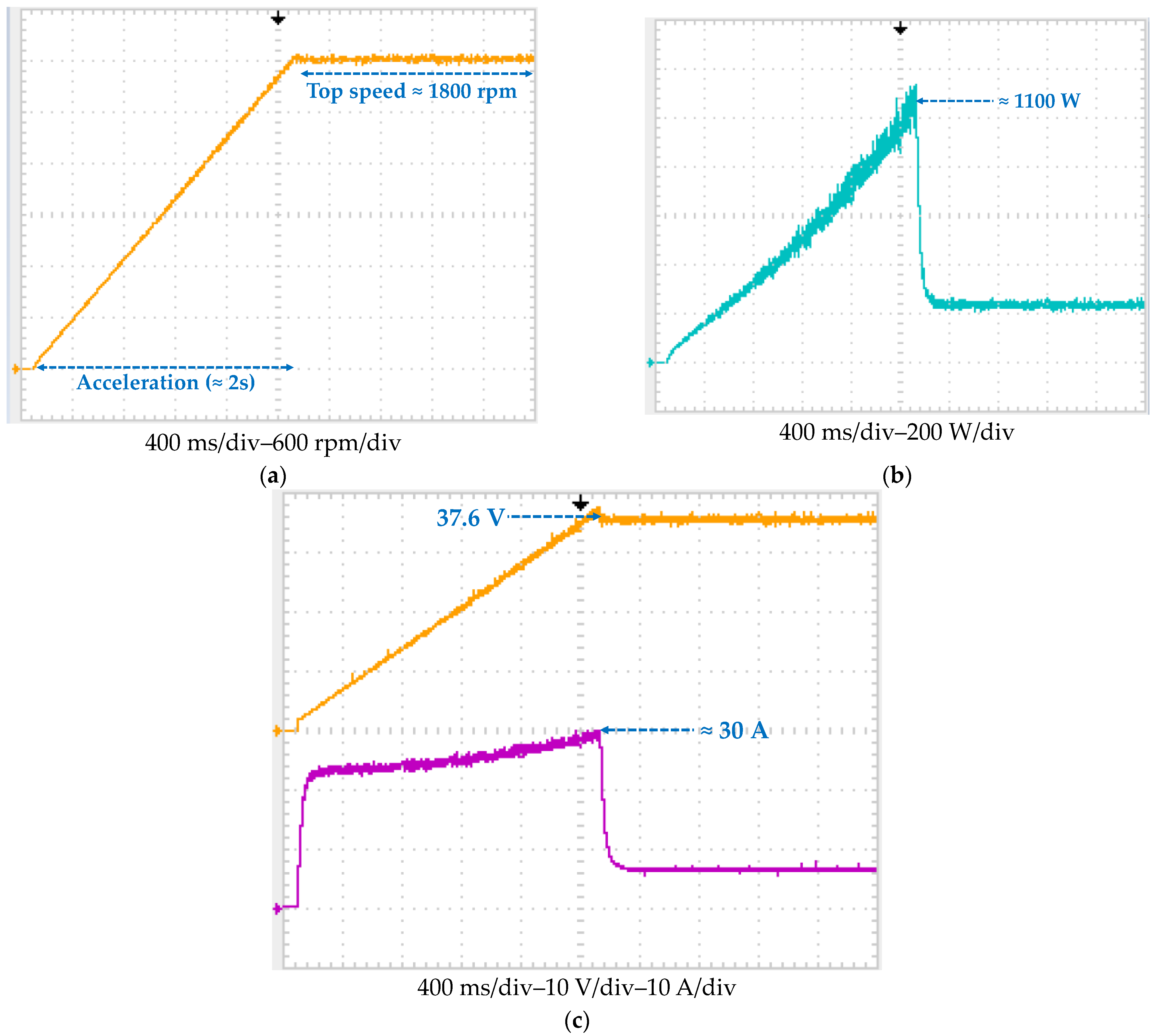
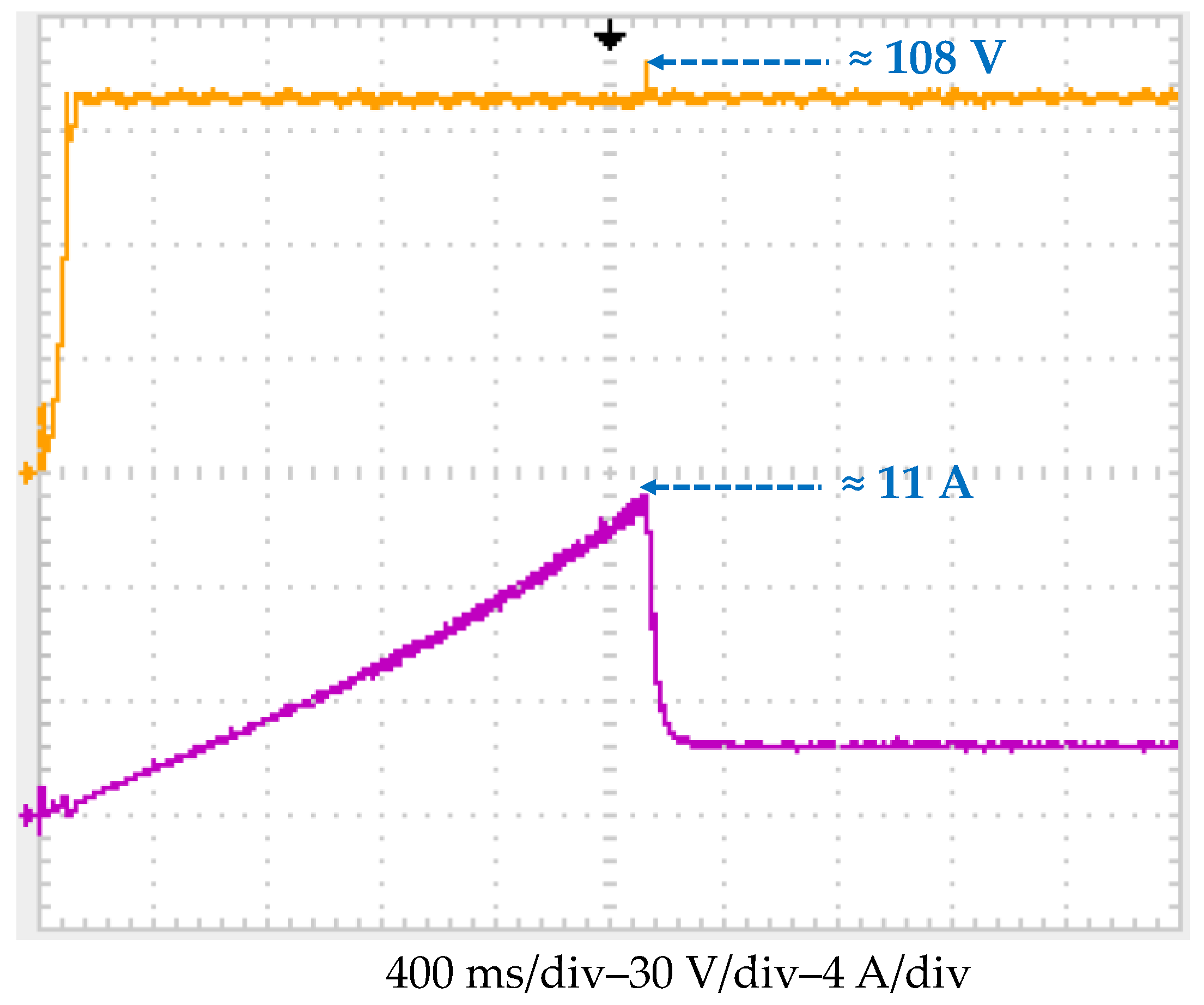
4.2. EV Acceleration
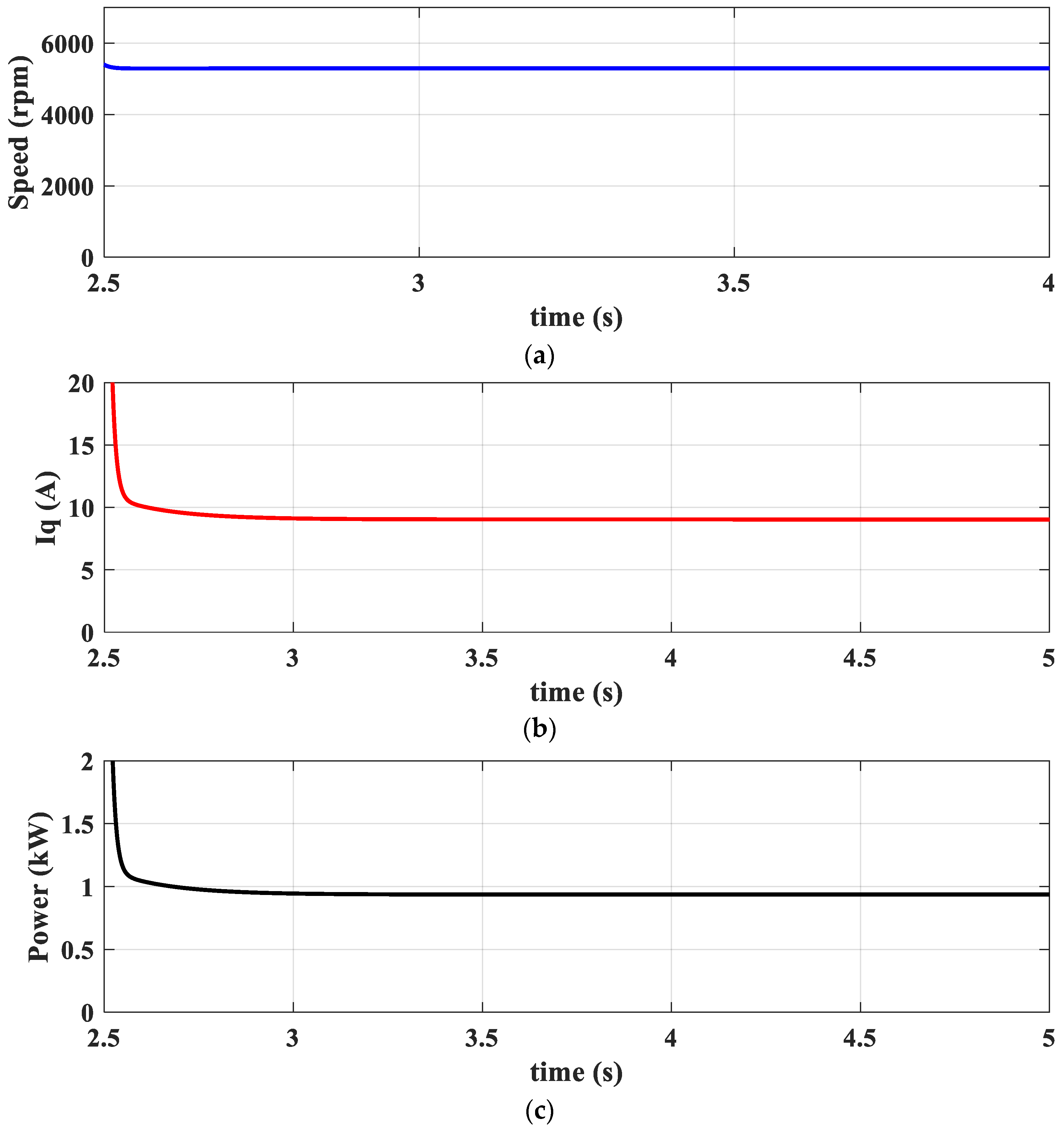
4.3. EV Top-Speed Operation
5. Parameter Design
5.1. EV Propulsion Mechanical Specifications
5.2. DC-Link Design Specifications
5.3. SM Design Specifications
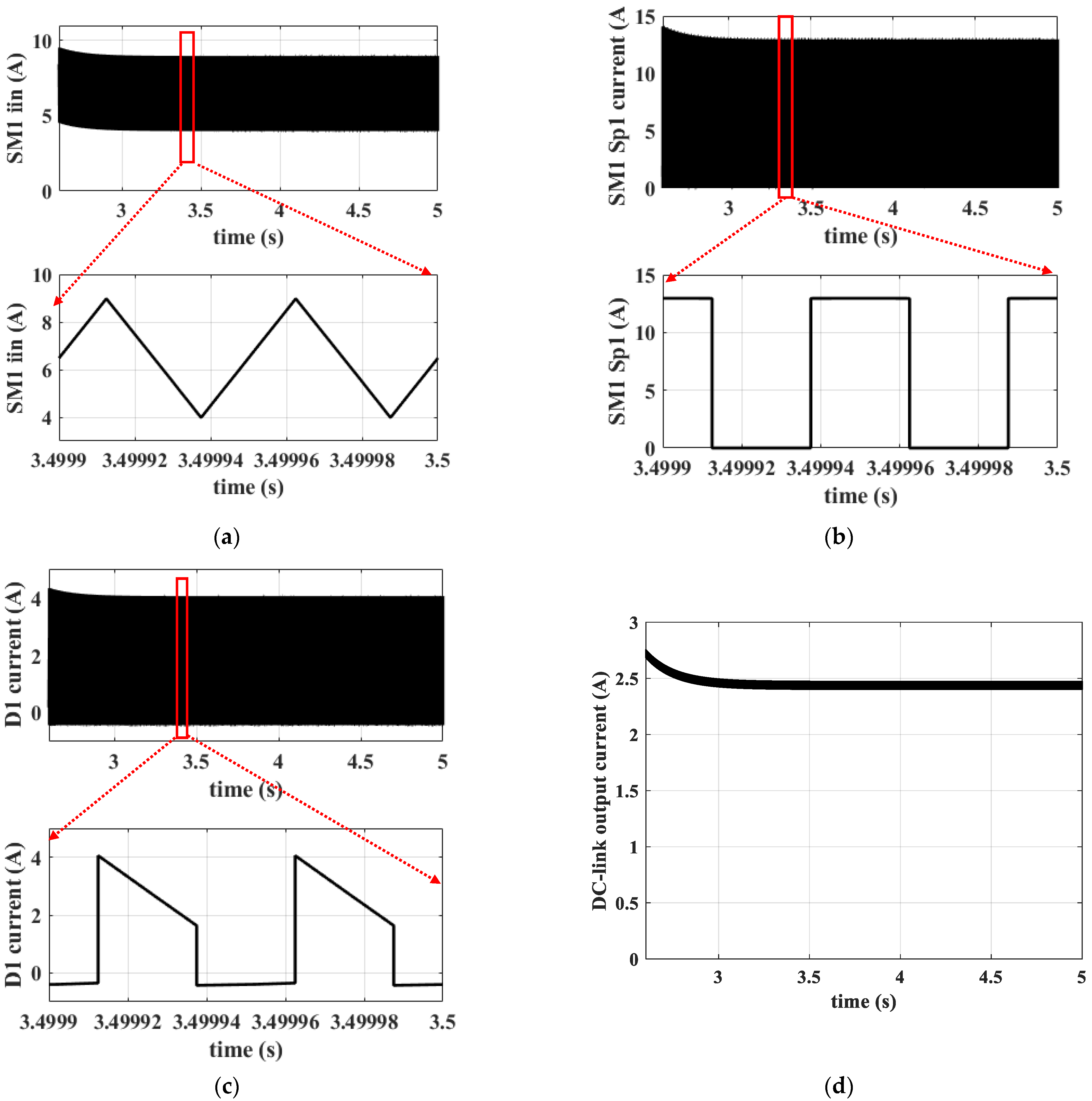
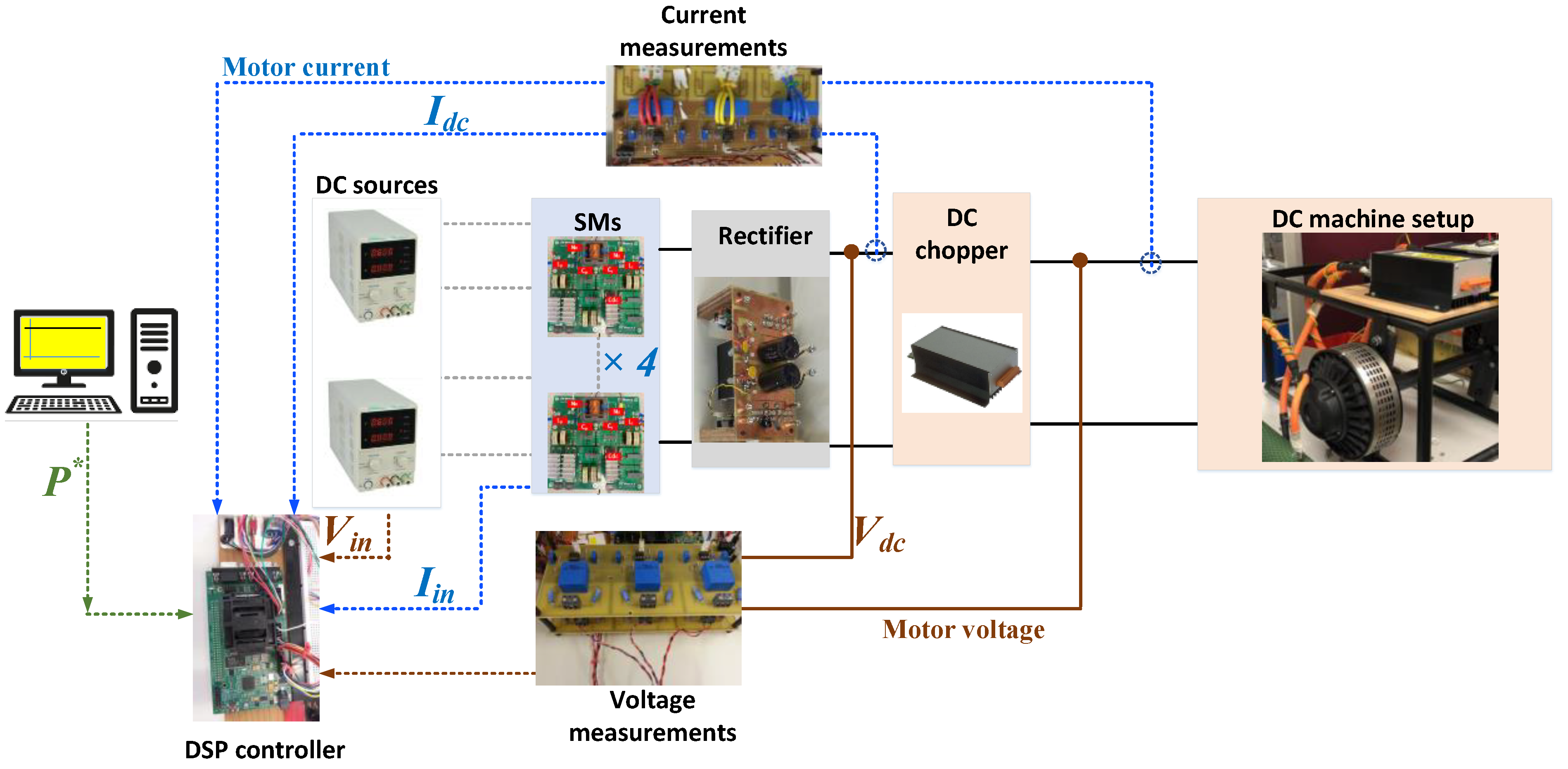
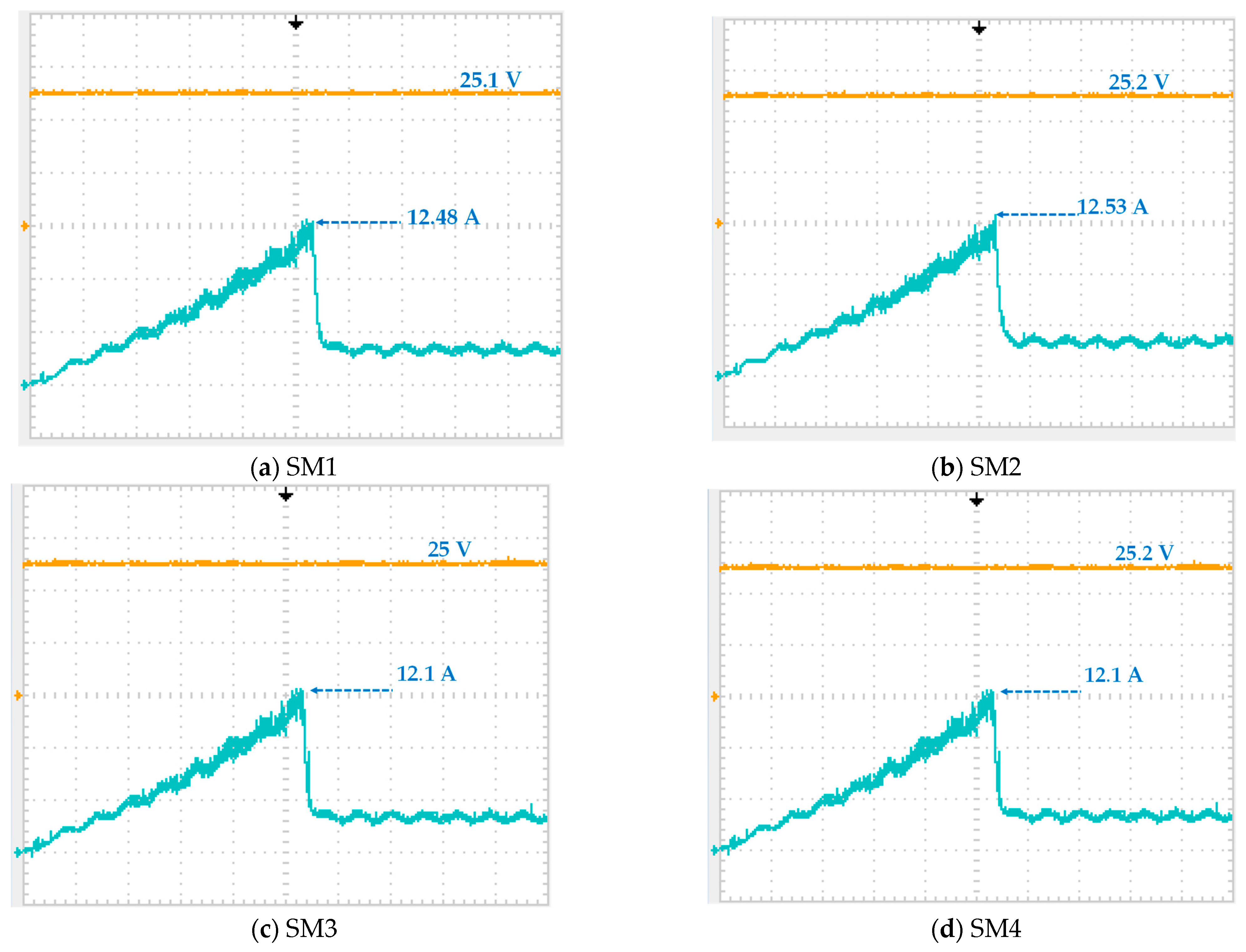
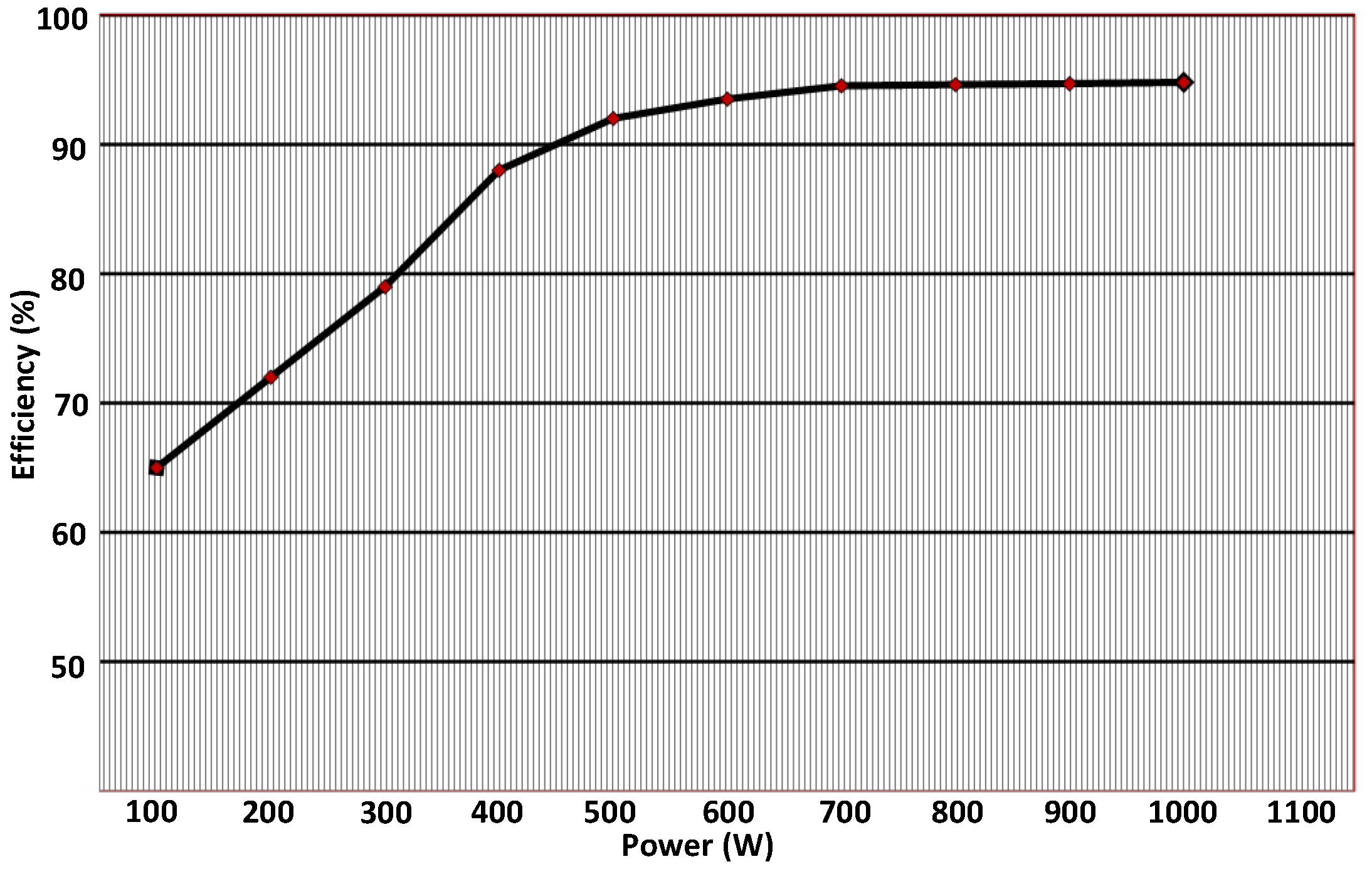
6. Experimental Results
7. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zeng, B.; Zhang, J.; Yang, X.; Wang, J.; Dong, J.; Zhang, Y. Integrated planning for transition to low-carbon distribution system with renewable energy generation and demand response. IEEE Trans. Power Syst. 2013, 29, 1153–1165. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Li, J.; Sumner, M.; Xia, C. DC–DC Boost Converter with a Wide Input Range and High Voltage Gain for Fuel Cell Vehicles. IEEE Trans. Power Electron. 2019, 34, 4100–4111. [Google Scholar] [CrossRef]
- Aljumah, A.; Darwish, A.; Csala, D.; Twigg, P. A Review on the Allocation of Sustainable Distributed Generators with Electric Vehicle Charging Stations. Sustainability 2024, 16, 6353. [Google Scholar] [CrossRef]
- IEA. Global EV Outlook 2023: Catching Up with Climate Ambitions. 2023. Available online: https://iea.blob.core.windows.net/assets/dacf14d2-eabc-498a-8263-9f97fd5dc327/GEVO2023.pdf (accessed on 1 January 2024).
- Bi, H.; Wang, P.; Che, Y. A capacitor clamped H-type boost DC-DC converter with wide voltage-gain range for fuel cell vehicles. IEEE Trans. Veh. Technol. 2019, 68, 276–290. [Google Scholar] [CrossRef]
- Wang, P.; Zhou, L.; Zhang, Y.; Li, J.; Sumner, M. Input-Parallel Output-Series DC-DC Boost Converter with a Wide Input Voltage Range, For Fuel Cell Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 7771–7781. [Google Scholar] [CrossRef]
- Bakar, M.; Alam, M.; Wårdemark, M.; Bertilsson, K. A 2 × 3 Reconfigurable Modes Wide Input Wide Output Range DC-DC Power Converter. IEEE Access 2021, 9, 44292–44303. [Google Scholar] [CrossRef]
- Benites Quispe, J.B.; Mezaroba, M.; Batschauer, A.L.; de Souza Ribeiro, J.M. A Reconfigurable Phase-Shifted Full-Bridge DC–DC Converter with Wide Range Output Voltage. Energies 2024, 17, 3483. [Google Scholar] [CrossRef]
- de Sá, F.L.; Ruiz-Caballero, D.; Dal’Agnol, C.; da Silva, W.R.; Mussa, S.A. High Static Gain DC–DC Double Boost Quadratic Converter. Energies 2023, 16, 6362. [Google Scholar] [CrossRef]
- Zhang, Y.; Sumner, L.Z.M.; Wang, P. Single-Switch, Wide Voltage-Gain Range, Boost DC–DC Converter for Fuel Cell Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 134–145. [Google Scholar] [CrossRef]
- Alotaibi, S.; Ma, X.; Darwish, A. Dual Isolated Multilevel Modular Inverter with Novel Switching and Voltage Stress Suppression. Energies 2022, 15, 5025. [Google Scholar] [CrossRef]
- Elgenedy, M.A.; Darwish, A.; Ahmed, S.; Williams, B.W. A Modular Multilevel-Based High-Voltage Pulse Generator for Water Disinfection Applications. IEEE Trans. Plasma Sci. 2016, 44, 2893–2900. [Google Scholar] [CrossRef]
- Darwish, A.; Holliday, D.; Finney, S. Operation and control design of an input-series–input-parallel–output-series conversion scheme for offshore DC wind systems. IET Power Electron. 2017, 10, 2092–2103. [Google Scholar] [CrossRef]
- Darwish, A.; Massoud, A.; Holliday, D.; Ahmed, S.; Williams, B. Generation, performance evaluation and control design of single-phase differential-mode buck–boost current-source inverters. IET Renew. Power Gener. 2016, 10, 916–927. [Google Scholar] [CrossRef]
- Darwish, A.; Elserougi, A.; Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.; Holliday, D.; Williams, B.W. A single-stage three-phase DC/AC inverter based on Cuk converter for PV application. In Proceedings of the 2013 7th IEEE GCC Conference and Exhibition (GCC), Doha, Qatar, 17–20 November 2013; pp. 384–389. [Google Scholar]
- Leyva-Ramos, J.; Ortiz-Lopez, M.G.; Diaz-Saldierna, L.H.; Morales-Saldana, J.A. Switching regulator using a quadratic boost converter for wide dc conversion ratios. IET Power Electron. 2009, 2, 605–613. [Google Scholar] [CrossRef]
- Axelrod, B.; Berkovich, Y.; Ioinovici, A. Switched-capacitor/switched-inductor structures for getting transformerless hybrid dc–dc PWM converters. IEEE Trans. Circuits Syst. I Reg. Papers 2008, 55, 687–696. [Google Scholar] [CrossRef]
- Maalandish, M.; Hosseini, S.H.; Jalilzadeh, T. High step-up dc/dc converter using switch-capacitor techniques and lower losses for renewable energy applications. IET Power. Electron. 2018, 11, 1718–1729. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, T.; He, Y. A Switched-Capacitor-Based Active-Network. IEEE Trans. Power Electron. 2014, 29, 2959–2968. [Google Scholar] [CrossRef]
- Pires, V.F.; Cordeiro, A.; Foito, D.; Silva, J.F. High Step-Up DC-DC Converter for Fuel Cell Vehicles Based on Merged Quadratic Boost-Ćuk. IEEE Trans. Veh. Technol. 2019, 68, 7521–7530. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, Y.; Bian, Q.; Guan, Y.; Xu, D. A Single Switch Quadratic Boost High Step Up DC–DC Converter. IEEE Trans. Ind. Electron. 2019, 66, 4387–4397. [Google Scholar] [CrossRef]
- Wu, X.; Yang, M.; Zhou, M.; Zhang, Y.; Fu, J. A novel high-gain dc-dc converter applied in fuel cell vehicles. IEEE Trans. Veh. Technol. 2020, 69, 12763–12774. [Google Scholar] [CrossRef]
- Vettuparambil, A.; Chatterjee, K.; Fernandes, B.G. Dual-active-bridge-based multiport converter with split DC links. IEEE Trans. Ind. Electron. 2022, 69, 485–494. [Google Scholar] [CrossRef]
- Vettuparambil, A.; Chatterjee, K.; Fernandes, B.G. A Multiport Converter Interfacing Solar Photovoltaic Modules and Energy Storage with DC Microgrid. IEEE Trans. Ind. Electron. 2021, 68, 3113–3123. [Google Scholar] [CrossRef]
- Geng, Z.; Hong, T.; Qi, K.; Ambrosio, J.; Gu, D. Modular Regenerative Emulation System for DC–DC Converters in Hybrid Fuel Cell Vehicle Applications. IEEE Trans. Veh. Technol. 2018, 67, 9233–9240. [Google Scholar] [CrossRef]
- Krastev, I.; Tricoli, P. Boost multilevel cascade inverter for hydrogen fuel cell light railway vehicles. IEEE Trans. Ind. Electron. 2022, 69, 7837–7847. [Google Scholar] [CrossRef]
- Khalatbarisoltani, A.; Boulon, L.; Hu, X. Integrating model predictive control with federated reinforcement learning for decentralized energy management of fuel cell vehicles. IEEE Trans. Intell. Transport. Syst. 2023, 24, 13639–13653. [Google Scholar] [CrossRef]
- Benevieri, A.; Carbone, L.; Cosso, S.; Marchesoni, M.; Passalacqua, M.; Savio, S.; Vaccaro, L. A New Feed-Forward Control for Dynamics Improvement in a Dual-Input DC–DC Converter for Hybrid Vehicle Applications. Energies 2024, 17, 2170. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Benmouna, A.; Becherif, M.; Hilairet, M.; Al-Sumaiti, A.S. New Interleaved-Input Double Float-Output DC/DC Converter Topology for Battery- Based EVs: Design, Modeling, Analysis and Experimental Implementation. IEEE Access 2024, 12, 77870–77890. [Google Scholar] [CrossRef]
- Darwish, A.; Elgenedy, M.A.; Williams, B.W. A Review of Modular Electrical Sub-Systems of Electric Vehicles. Energies 2024, 17, 3474. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Nominal DC-link voltage | 400 V |
| Number of SMs | n = 4 |
| Total power | 16 kW |
| Switching frequency | 50 kHz |
| SM duty cycle ratios | 50% |
| FC input voltage | 50 V |
| EV mass | 300 kg |
| SM inductance | Lp = 1 mH |
| DC-link capacitor | Cdc = 100 µF |
| HFT turn ratios | 1 |
| Parameter | Value |
|---|---|
| Drive DC voltage | 400 V |
| Maximum power | 10 kW |
| Motor type | Permanent Magnet Synchronous Motor |
| Motor nominal speed | 6000 rpm |
| Motor maximum torque | 140 Nm. |
| Maximum current | 200 |
| Motor efficiency | 95% |
| Motor inductances | Ld/Lq = 125/130 μH |
| Internal phase resistance at 25 °C | 12 mΩ |
| Wheel radius | r = 30 cm |
| Gearbox ratio | G = 6 |
| DC-link capacitor | 100 µF |
| Switching frequency | 16 kHz |
| Parameter | Value |
|---|---|
| Drive DC voltage | 100 V |
| Maximum power | 1 kW |
| Motor type | Brushed DC Motor |
| Motor nominal speed | 2000 rpm |
| Motor maximum torque | 10 Nm. |
| Motor efficiency | 95% |
| Wheel radius | r = 30 cm |
| DC-link capacitor | 30 µF |
| Gearbox ratio | G = 3.75 |
| Maximum current | 20 A |
| Voltage transducers | LEM 25-P |
| Current transducers | LEM HTFS 200-P |
| Speed transducers | SS360NT |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darwish, A. A Modular Step-Up DC/DC Converter for Electric Vehicles. Energies 2024, 17, 6305. https://doi.org/10.3390/en17246305
Darwish A. A Modular Step-Up DC/DC Converter for Electric Vehicles. Energies. 2024; 17(24):6305. https://doi.org/10.3390/en17246305
Chicago/Turabian StyleDarwish, Ahmed. 2024. "A Modular Step-Up DC/DC Converter for Electric Vehicles" Energies 17, no. 24: 6305. https://doi.org/10.3390/en17246305
APA StyleDarwish, A. (2024). A Modular Step-Up DC/DC Converter for Electric Vehicles. Energies, 17(24), 6305. https://doi.org/10.3390/en17246305