
Research on Energy Management Strategies Based on Bargaining Game for Range-Extended Electric Vehicle Considering Battery Life

 ,
,
Abstract
1. Introduction
1.1. Literature Review
1.2. Motivation and Innovation
2. Design of EMS Based on Bargaining Game
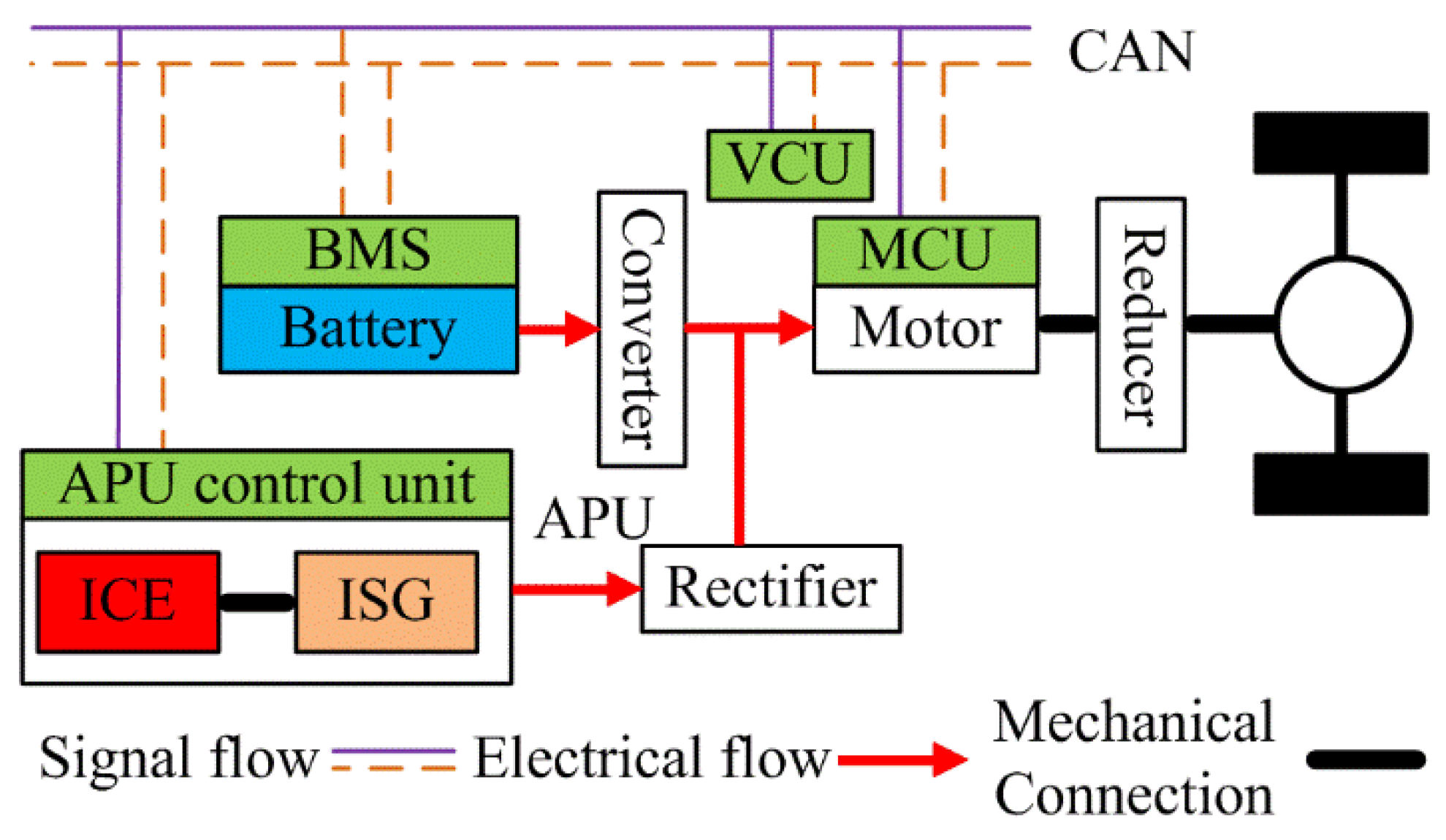
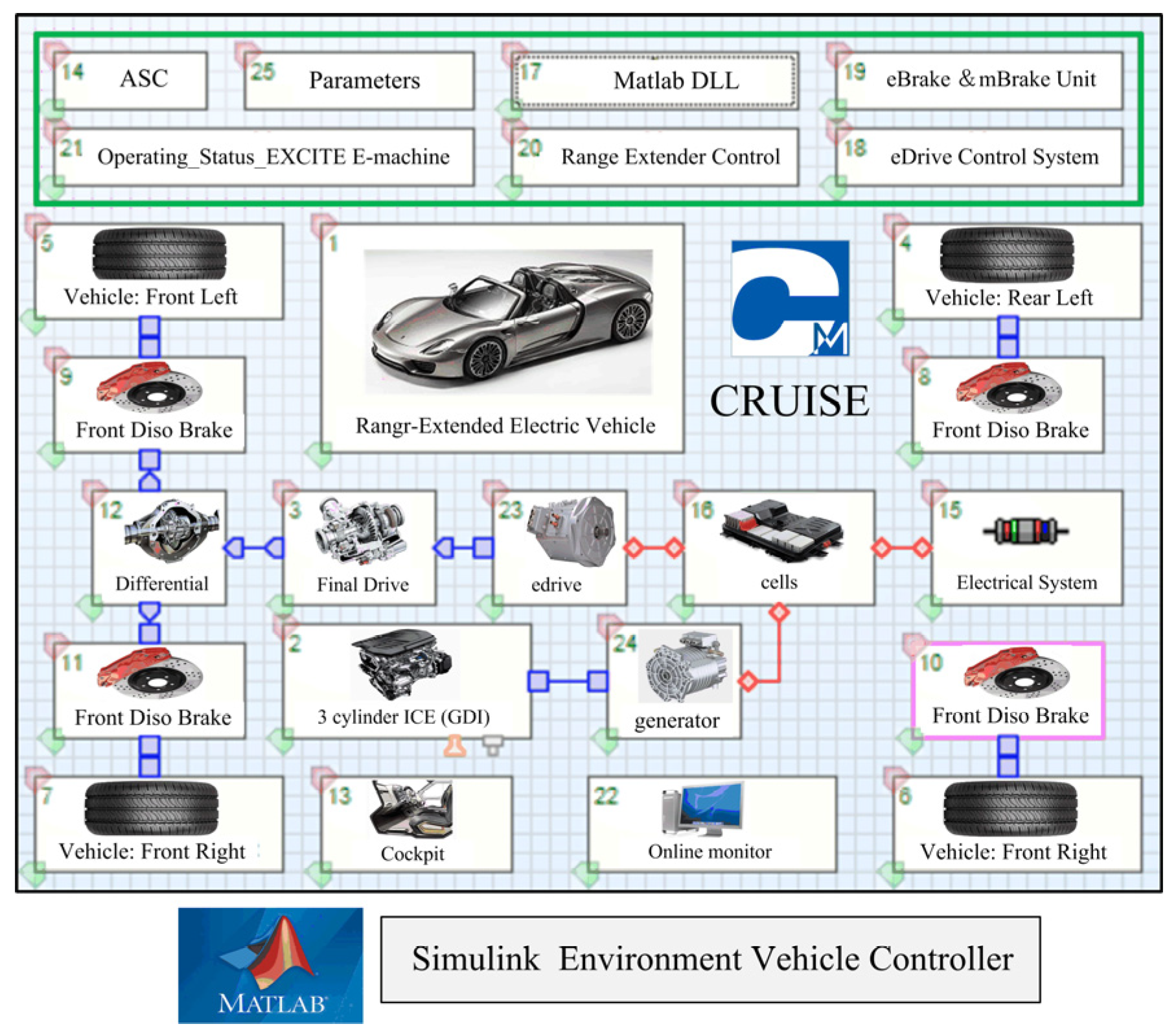
2.1. Configuration of the Studied REEV Model
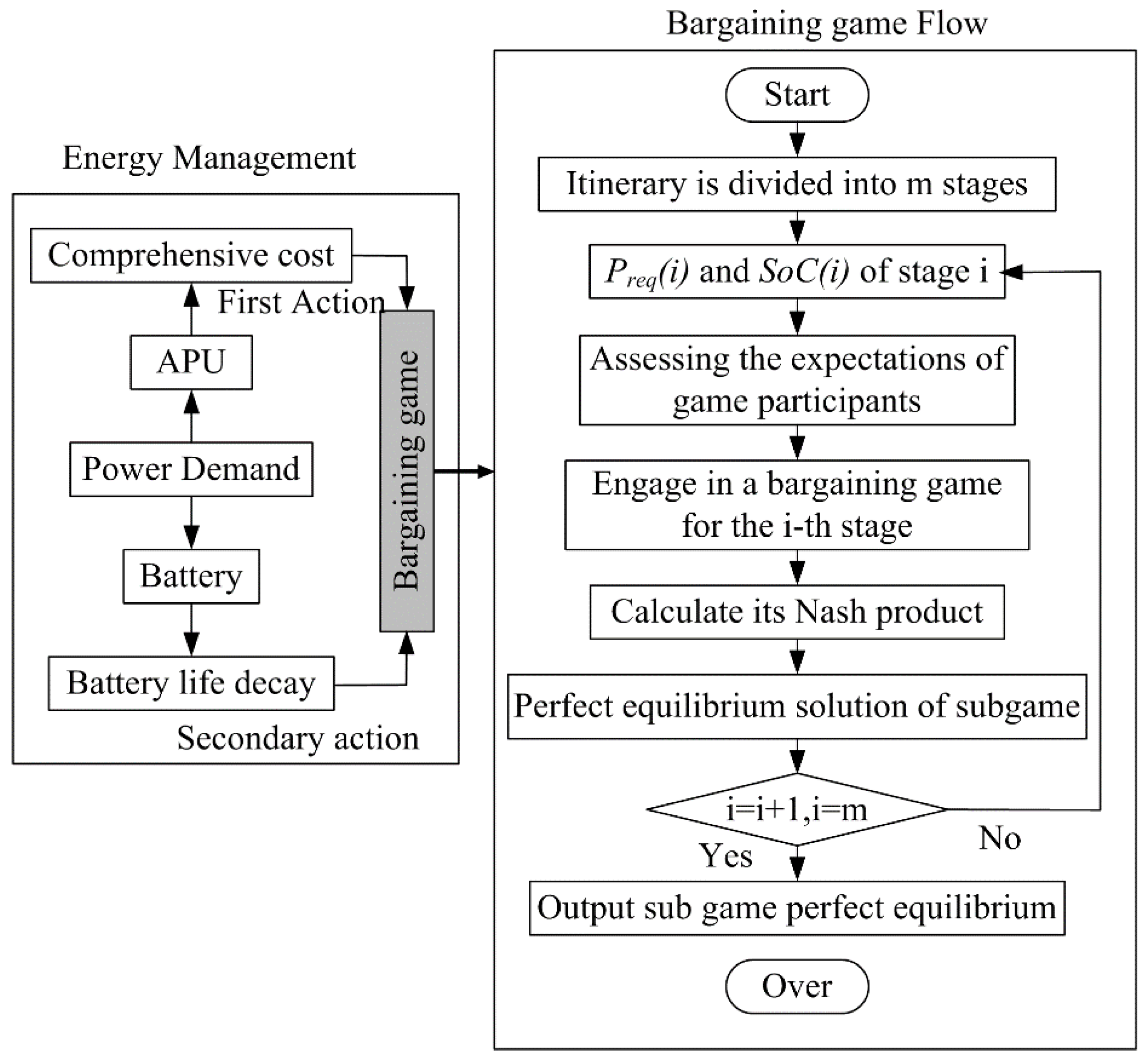
2.2. EMS Based on Bargaining Game
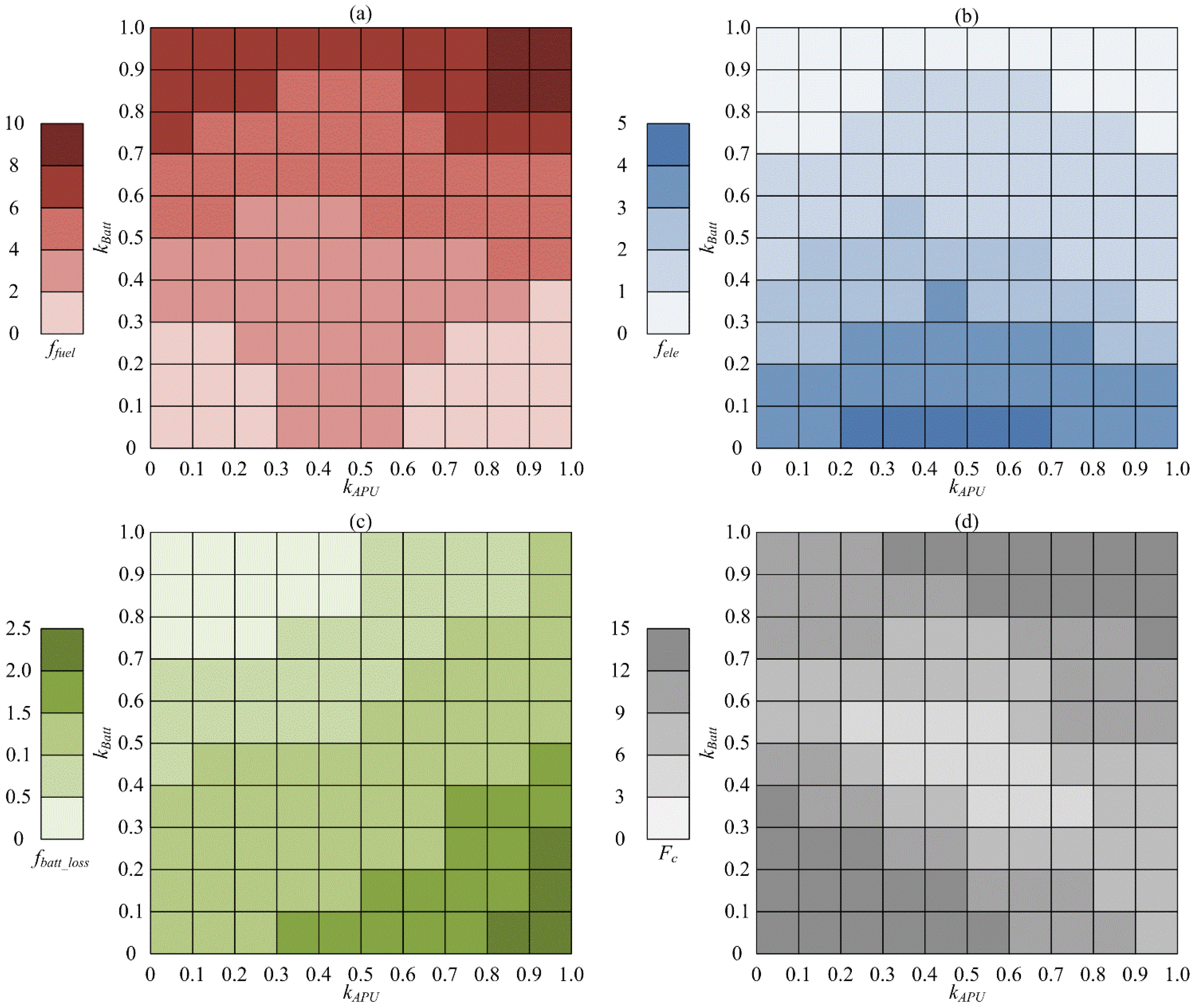
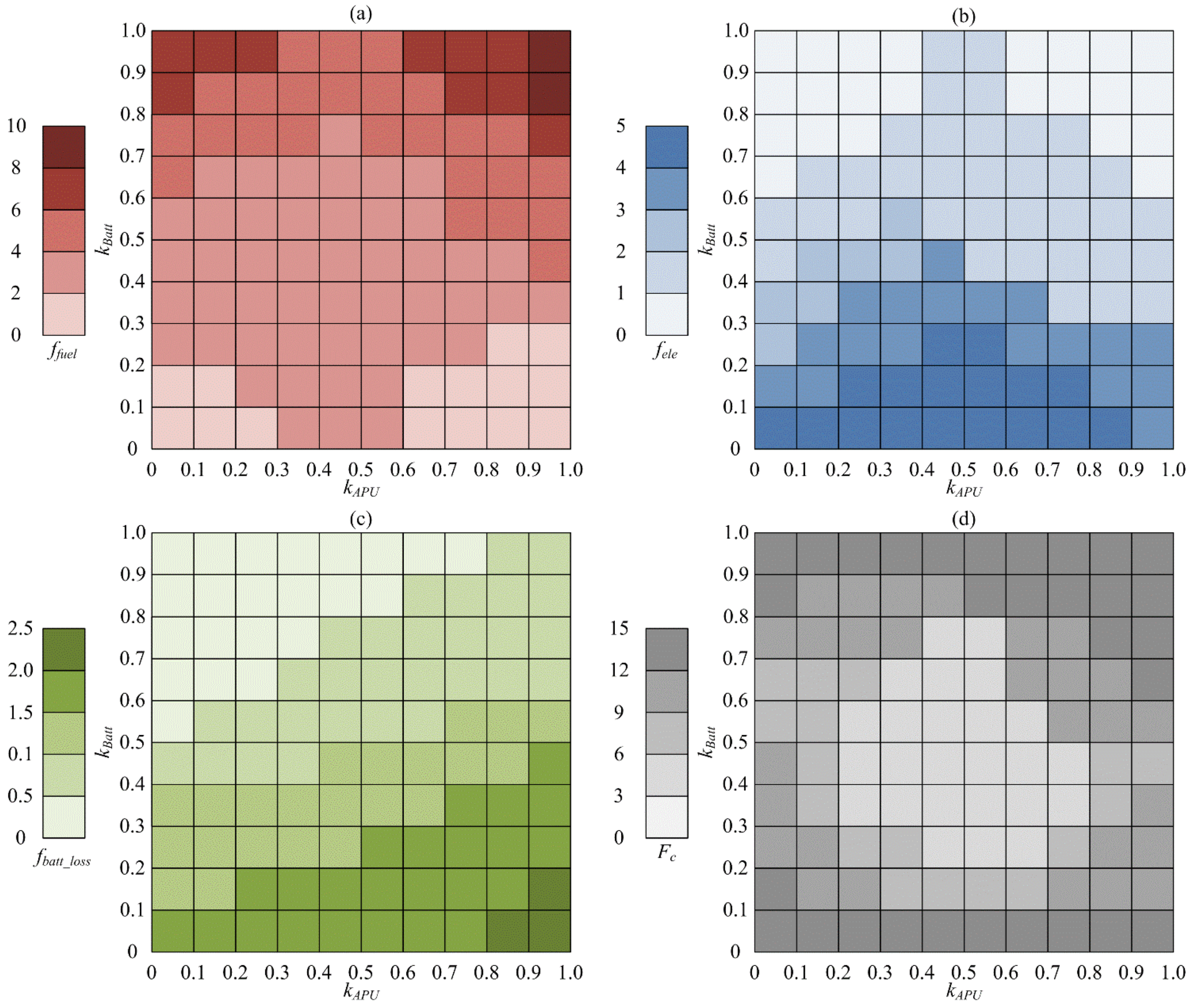
2.3. Analysis of the Impact of Discount Factors on Game Results Based on Simulation Experiments
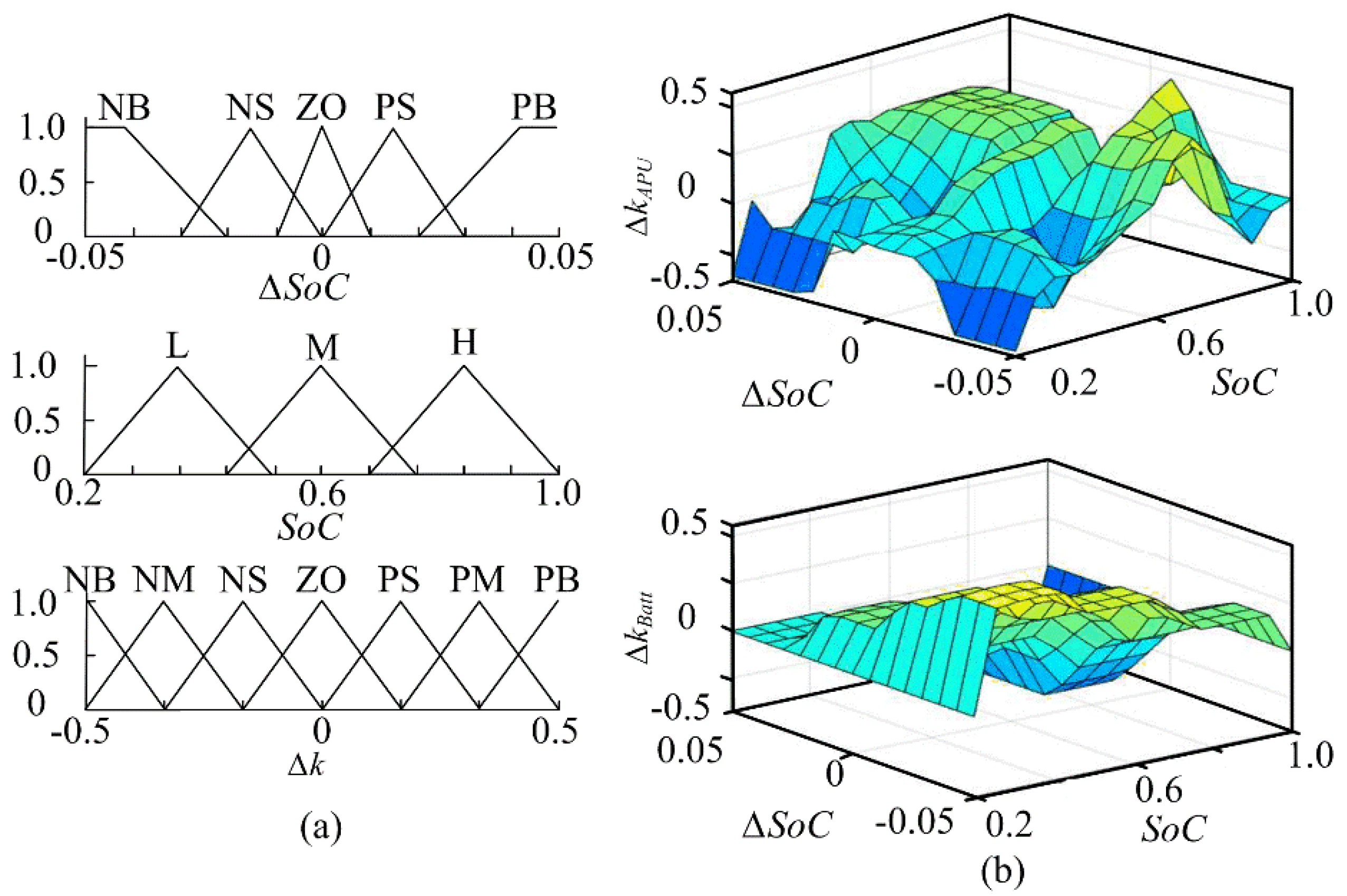
3. EMS Based on Bargaining Game Considering Battery Life
4. Verification and Discussion
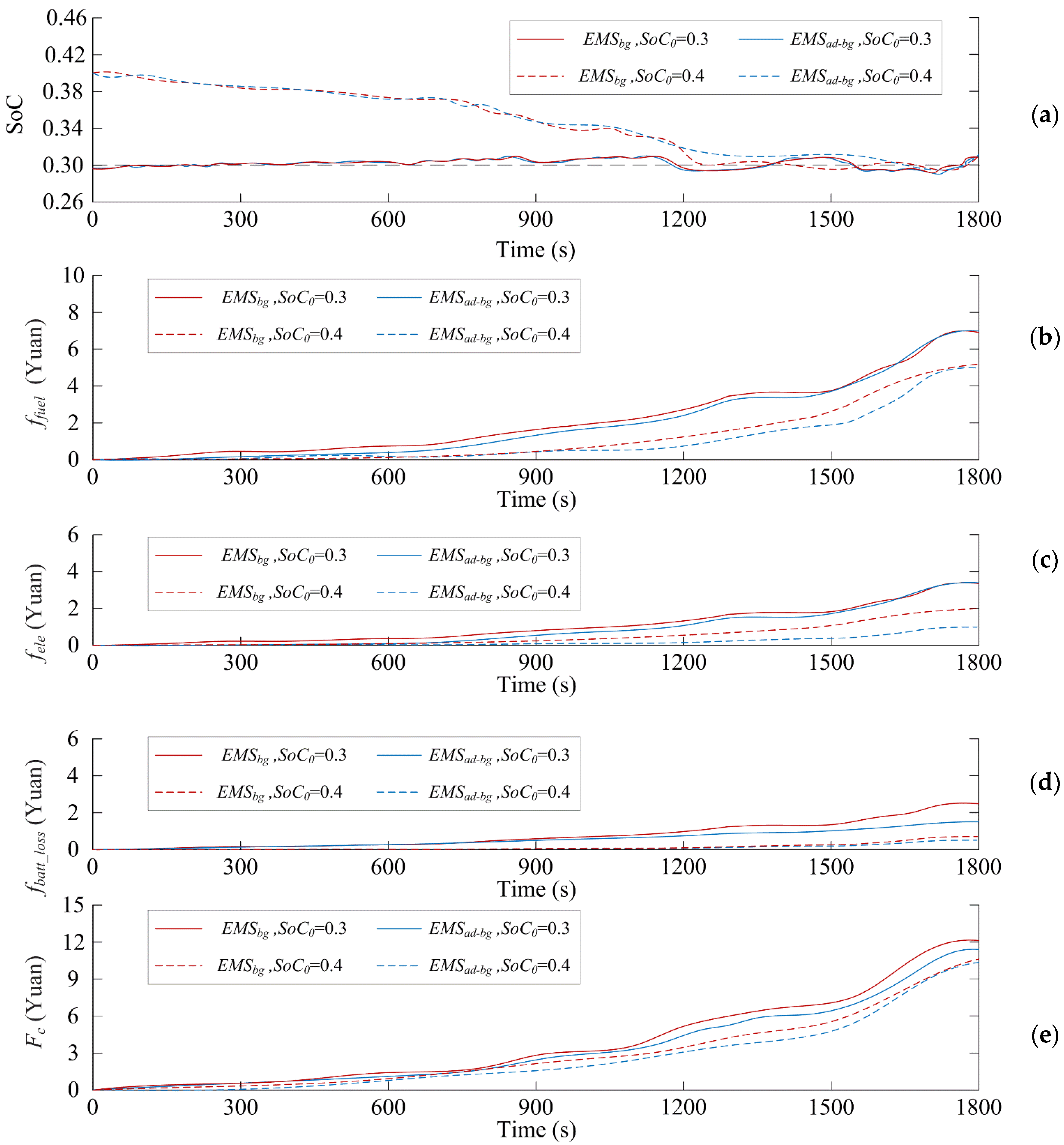
4.1. Verification of Bargaining Adaptive Strategy Considering SoC
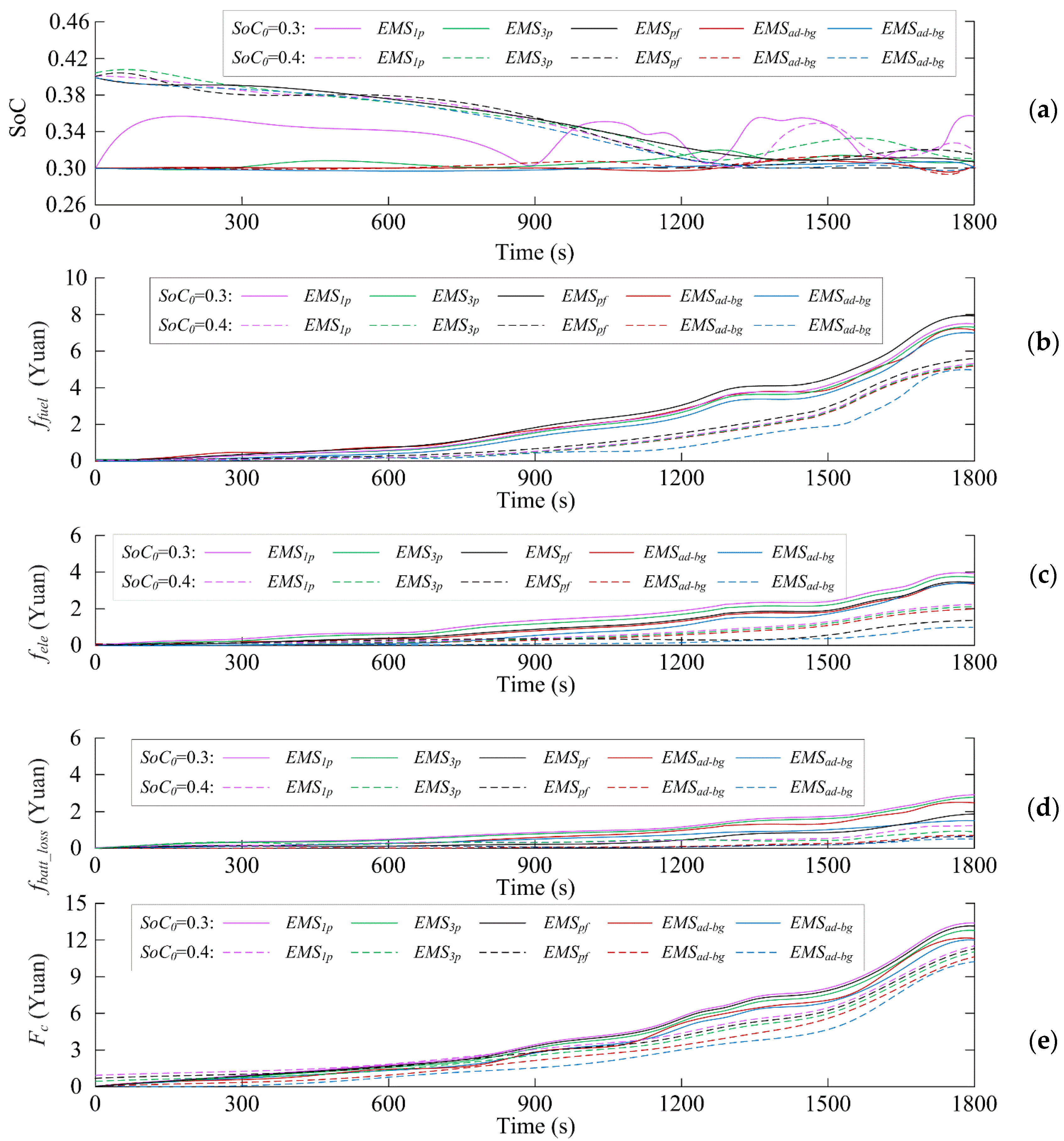
4.2. Comparison of Simulation Results for Different Control Strategies
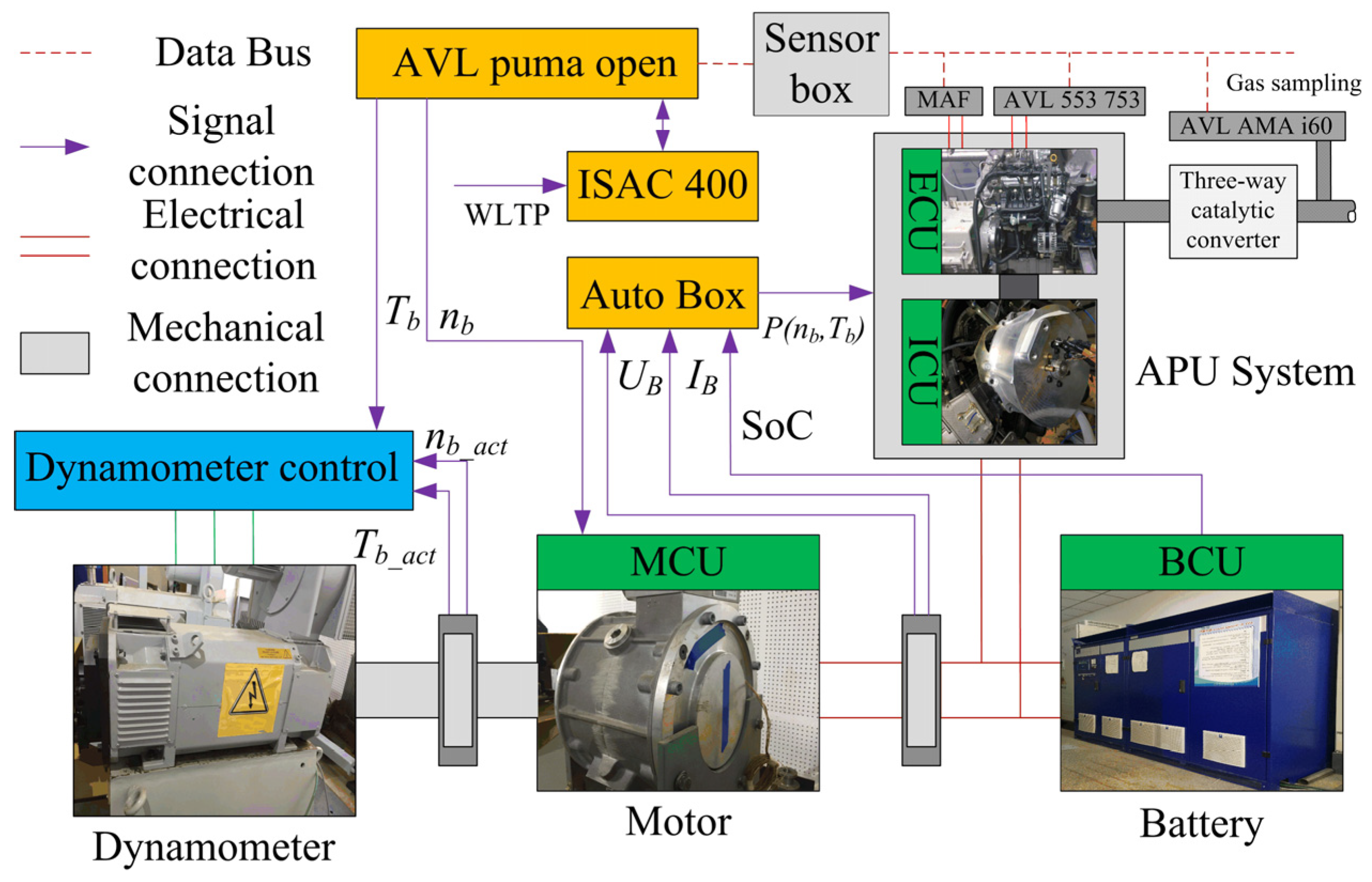
4.3. Experimental Test Implementation and Its Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tarroja, B.; Shaffer, B.; Samuelsen, S. The importance of grid integration for achievable greenhouse gas emissions reductions from alternative vehicle technologies. Energy 2015, 87, 504–519. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Chen, B.C.; Wu, Y.Y.; Tsai, H.C. Design and analysis of power management strategy for range extended electric vehicle using dynamic programming. Appl. Energy 2014, 113, 1764–1774. [Google Scholar] [CrossRef]
- Lan, S.; Stobart, R.; Chen, R. Performance comparison of a thermoelectric generator applied in conventional vehicles and extended-range electric vehicles. Energy Convers. Manag. 2022, 266, 115791. [Google Scholar] [CrossRef]
- Wu, X.; Gu, Y.; Xu, M. Adaptive energy management strategy for extended-range electric vehicle based on micro-trip identification. IEEE Access 2020, 8, 176555–176564. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Cheng, X.Q.; Xing, Z.Y.; Wang, Z.H. Energy management strategy optimization for hybrid energy storage system of tram based on competitive particle swarm algorithms. J. Energy Storage 2024, 75, 109698. [Google Scholar] [CrossRef]
- Li, J.; Wu, X.; Min, X.; Liu, Y. A real-time optimization energy management of range extended electric vehicles for battery lifetime and energy consumption. J. Power Sources 2021, 498, 229939. [Google Scholar] [CrossRef]
- Bai, Y.; Li, J.; He, H.; Dos Santos, R.C.; Yang, Q. Optimal design of a hybrid energy storage system in a plug-in hybrid electric vehicle for battery lifetime improvement. IEEE Access 2020, 8, 142148–142158. [Google Scholar] [CrossRef]
- Hwang, J.J.; Hu, J.S.; Lin, C.H. A Novel Range-Extended Strategy for Fuel Cell/Battery Electric Vehicles. Sci. World J. 2015, 2015, 363094. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Du, S.; Ma, H.; Zhao, W.; Li, H. Energy management strategies for hybrid construction machinery: Evolution, classification, comparison and future trends. Energies 2019, 12, 2024. [Google Scholar] [CrossRef]
- Kong, Y.; Xu, N.; Zhang, Y.J. Acquisition of full-factor tripinformation for global optimization energy management in multi-energy source vehicles and the measure of the amount of information to be transmitted. Energy 2021, 236, 121423. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Coskun, S.; Cui, Y.; Pang, H. Computationally Efficient Energy Management in Hybrid Electric Vehicles Based on Approximate Pontryagin’s Minimum Principle. World Electr. Veh. J. 2020, 11, 65. [Google Scholar] [CrossRef]
- Fernández, R.; Caraballo, S.; Cilleruelo, F. Fuel optimization strategy for hydrogen fuel cell range extender vehicles applying genetic algorithms. Renew. Sustain. Energy Rev. 2018, 81, 655–668. [Google Scholar] [CrossRef]
- Chen, Z.; Xiong, R.; Cao, J. Particle swarm optimization-based optimal power management of plug-in hybrid electric vehicles considering uncertain driving conditions. Energy 2016, 96, 197–208. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. Online adaptive equivalent consumption minimization strategy for fuel cell hybrid electric vehicle considering power sources degradation. Energy Convers. Manag. 2019, 192, 133–149. [Google Scholar] [CrossRef]
- Zhang, Y.; Wei, Z.; Wang, Z.; Tian, Y.; Wang, J.; Tian, Z.; Xu, F.; Jiao, X.; Li, L.; Wen, G. Hierarchical eco-driving control strategy for connected automated fuel cell hybrid vehicles and scenario-/hardware-in-the loop validation. Energy 2024, 292, 130592.1–130592.18. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A.; Song, Q. Model predictive control-based energy management strategy for a series hybrid electric tracked vehicle. Appl. Energy 2016, 182, 105–114. [Google Scholar] [CrossRef]
- Lin, K. Research on Energy Management Optimization of Micro Energy Network Based on Game Theory. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2020. [Google Scholar]
- Zhu, Z.; Lambotharan, S.; Chin, W.H.; Fan, Z. A mean field game theoretic approach to electric vehicles charging. IEEE Access 2016, 4, 3501–3510. [Google Scholar] [CrossRef]
- Wen, J.; Du, X.; Li, X.; Chen, L. A Dynamic game approach for multi-objectives regulating in shared energy storage scenarios. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 5321–5326. [Google Scholar]
- Zeng, X.; Gao, H.; Chen, Z.; Yang, D.; Song, D. Cooperative optimization of speed planning and energy management for hybrid electric vehicles based on Nash equilibrium. J. Power Sources 2023, 571, 233070. [Google Scholar] [CrossRef]
- Ruan, S.; Ma, Y.; Yang, N.; Yan, Q.; Xiang, C. Multiobjective optimization of longitudinal dynamics and energy management for HEVs based on nash bargaining game. Energy 2023, 262, 125422. [Google Scholar] [CrossRef]
- Ruan, S.; Ma, Y.; Wei, Z.; Zhang, C.; Xiang, C. Data-Driven Cooperative Differential Game Based Energy Management Strategy for Hybrid Electric Propulsion System of a Flying Car. IEEE Trans. Intell. Transp. Syst. 2024, 25, 14770–14784. [Google Scholar] [CrossRef]
- Khodaparastan, M.; Mohamed, A.A.; Brandauer, W. Recuperation of Regenerative Braking Energy in Electric Rail Transit Systems. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2831–2847. [Google Scholar] [CrossRef]
- Chen, J.; Hu, H.; Wang, M.; Ge, Y.; Wang, K.; Huang, Y.; Yang, K.; He, Z.; Xu, Z.; Li, Y.R. Power Flow Control-Based Regenerative Braking Energy Utilization in AC Electrified Railways: Review and Future Trends. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6345–6365. [Google Scholar] [CrossRef]
- Liu, H.; Lei, Y.; Fu, Y.; Li, X. Parameter matching and optimization for power system of range-extended electric vehicle based on requirements. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 095440702093678. [Google Scholar] [CrossRef]
- Li, J.; Jin, X.; Xiong, R. Multi-objective optimization study of energy management strategy and economic analysis for a range-extended electric bus. Appl. Energy 2017, 194, 798–807. [Google Scholar] [CrossRef]
- Song, D.; Yang, L.; Zeng, X.; Wang, X.; Liang, W.; Yang, N. Optimization of hybrid electric vehicle battery life based on driving cycle synthesis. J. Jilin Univ. Eng. Ed. 2021, 51, 781–791. [Google Scholar]
- Sun, F.; Xiong, R.; He, H. A systematic state-of-charge estimation framework for multi-cell battery pack in electric vehicles using bias correction technique. Appl. Energy 2016, 162, 1399–1409. [Google Scholar] [CrossRef]
- Vassilyev, S.N.; Kudinov, Y.I.; Pashchenko, F.F.; Durgaryan, I.S.; Kelina, A.Y.; Kudinov, I.Y.; Pashchenko, A.F. Intelligent Control Systems and Fuzzy Controllers. II. Trained Fuzzy Controllers, Fuzzy PID Controllers. Autom. Remote Control 2020, 81, 922–934. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Full load weight (kg) | 1700 |
| Wheelbase (mm) | 2865 |
| Distance from front axle to centroid (mm) | 1352 |
| Distance from rear axle to centroid (mm) | 1513 |
| Centroid height (mm) | 500 |
| Drag area (m2) | 1.66 |
| Correction coefficient of rotating mass | 1.1 |
| Mechanical efficiency | 0.96 |
| Transmission reduction ratio | 4.2 |
| ∆kAPU | ∆SoC | |||||
| NB | NS | ZO | PS | PB | ||
| SoC | L | NB | NM | NS | NS | NS |
| M | NS | ZO | ZO | PS | PS | |
| H | ZO | PS | PS | PM | PB | |
| ∆kBatt | ∆SoC | |||||
| NL | NS | ZO | PS | PL | ||
| SoC | L | PB | PM | PS | PS | ZO |
| M | PM | PS | ZO | ZO | NS | |
| H | PS | ZO | NS | NM | NM | |
| Strategy | SoC0 = 0.3 | SoC0 = 0.4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SoCfinal | ffuel | fele | fbatt_sub | Fc | SoCfinal | ffuel | fele | fbatt_sub | Fc | |
| MES1p | 0.357 | 8.54 | 3.83 | 1.21 | 12.58 | 0.344 | 5.66 | 2.24 | 2.86 | 10.76 |
| MES3p | 0.324 | 7.33 | 3.69 | 0.99 | 12.01 | 0.327 | 5.43 | 2.09 | 2.77 | 10.29 |
| MESpf | 0.319 | 9.88 | 3.44 | 0.24 | 13.56 | 0.321 | 6.07 | 1.42 | 1.83 | 9.32 |
| EMSbg | 0.315 | 7.26 | 3.42 | 0.37 | 11.05 | 0.318 | 5.13 | 1.31 | 2.45 | 8.89 |
| EMSad-bg | 0.304 | 7.12 | 3.41 | 0.21 | 10.74 | 0.307 | 5.01 | 0.93 | 1.68 | 7.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Z.; Liu, J.; Long, S.; Su, Z.; Liu, H.; Chang, C.; Song, W. Research on Energy Management Strategies Based on Bargaining Game for Range-Extended Electric Vehicle Considering Battery Life. Energies 2024, 17, 6238. https://doi.org/10.3390/en17246238
Gao Z, Liu J, Long S, Su Z, Liu H, Chang C, Song W. Research on Energy Management Strategies Based on Bargaining Game for Range-Extended Electric Vehicle Considering Battery Life. Energies. 2024; 17(24):6238. https://doi.org/10.3390/en17246238
Chicago/Turabian StyleGao, Zhenhai, Jiewen Liu, Shiqing Long, Zihang Su, Hanwu Liu, Cheng Chang, and Wang Song. 2024. "Research on Energy Management Strategies Based on Bargaining Game for Range-Extended Electric Vehicle Considering Battery Life" Energies 17, no. 24: 6238. https://doi.org/10.3390/en17246238
APA StyleGao, Z., Liu, J., Long, S., Su, Z., Liu, H., Chang, C., & Song, W. (2024). Research on Energy Management Strategies Based on Bargaining Game for Range-Extended Electric Vehicle Considering Battery Life. Energies, 17(24), 6238. https://doi.org/10.3390/en17246238