
Research on Fault Feature Extraction Method for Hydroelectric Generating Unit Based on Improved FMD and CDEI


Abstract
1. Introduction
2. Research Method
2.1. FMD Method
2.2. Introduction to CDEI
2.3. Fault Feature Extraction Method for Hydroelectric Generating Units Based on Improved FMD and CDEI
- (1)
- Set the relevant parameters for the improved FMD, including the filter length L, the maximum number of iterations I, the number of filter bands C, and the number of frequency band divisions K. Initialize the iteration count i = 1.
- (2)
- Initialize FIR filters using a Hanning window and uniformly divide the frequency band of the original signal into segments K.
- (3)
- Filter the original signal using the FIR filters to obtain .
- (4)
- Use the original signal and the obtained to update the filter coefficients according to Formula (2).
- (5)
- Check whether the iteration count i has reached the maximum value I. If so, proceed to step (6); otherwise, continue the loop by returning to step (3).
- (6)
- Extract P feature parameters from each of the K modal components obtained and calculate the CDEI index , , for each feature mode according to Formulas (4) to (12).
- (7)
- Select the modal component corresponding to the maximum CDEI index from the K modal components as the desired modal component for fault feature extraction.
- (8)
- Use DEI to evaluate the P feature parameters extracted from the optimal modal component and select the q feature parameters with the highest DEI values for output.

3. Application Experiments
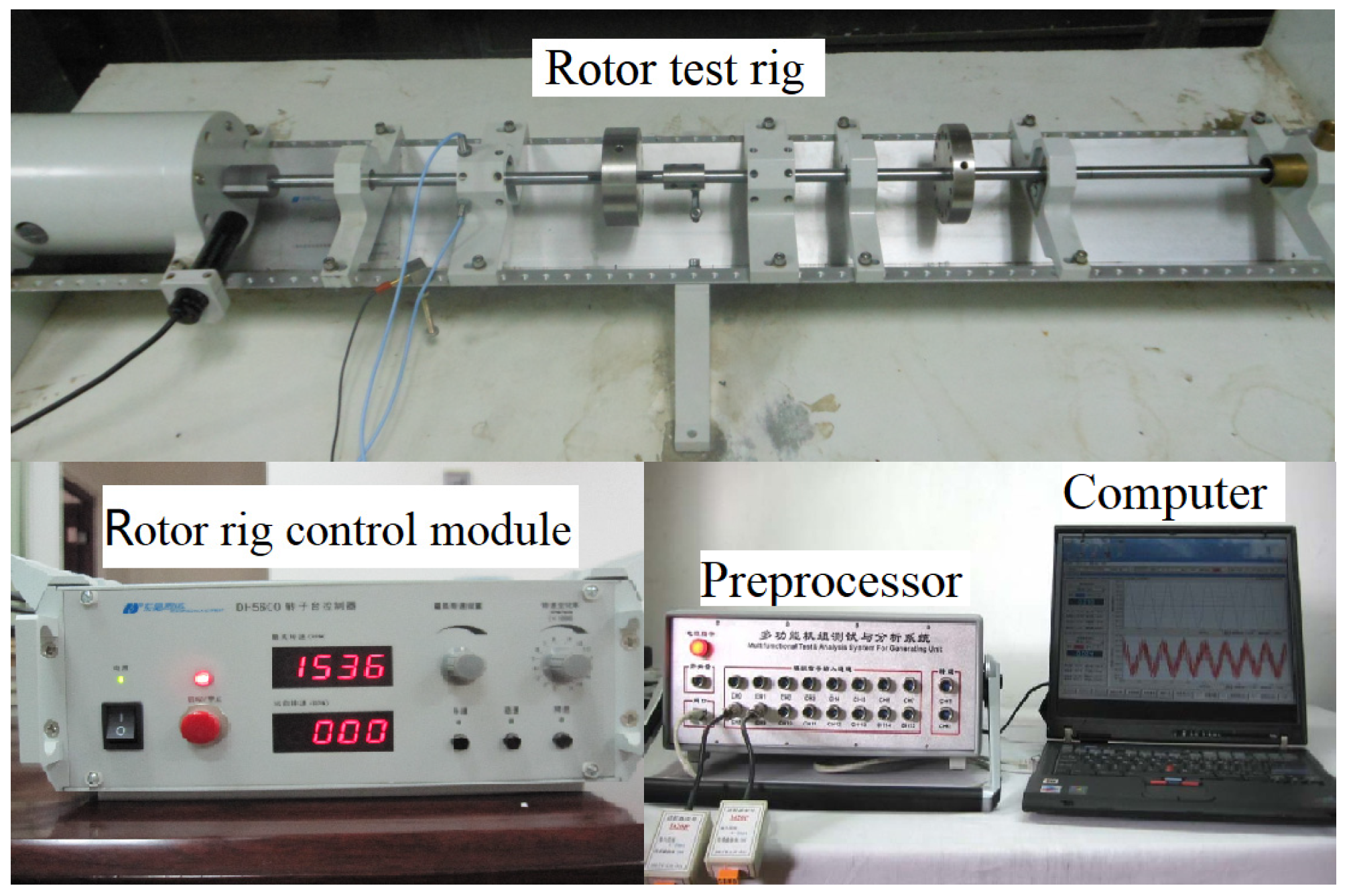
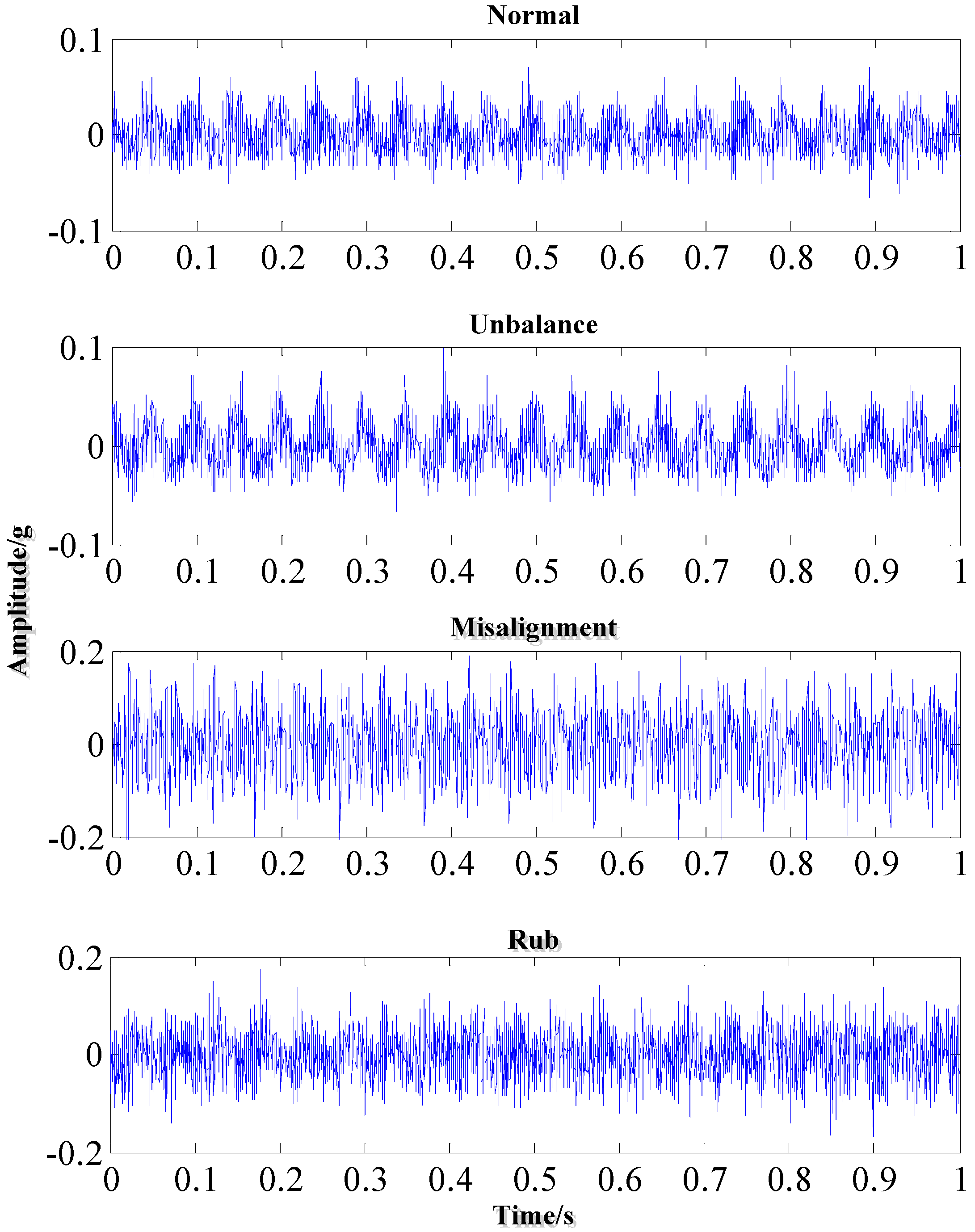
3.1. Experiment Data
- (1)
- Rotor Test Rig Data
- (2)
- On-site Data of Hydropower Turbine Unit
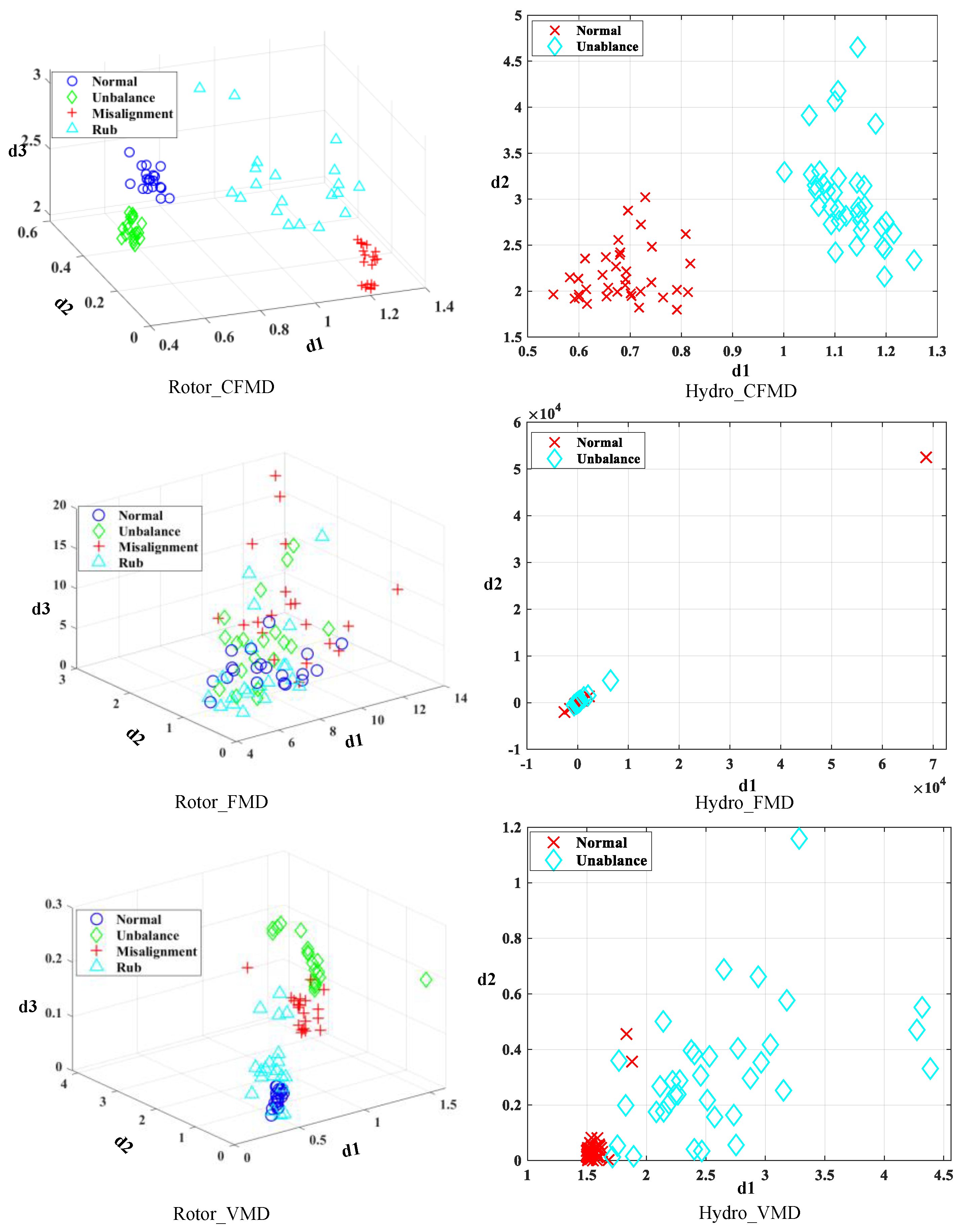
3.2. Feature Extraction Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, W.; Zheng, Y.; Ma, Z.; Tian, B.; Chen, Q. An intelligent fault diagnosis scheme for hydropower units based on the pattern recognition of axis orbits. Meas. Sci. Technol. 2023, 34, 025104. [Google Scholar] [CrossRef]
- Li, X.; Zhang, J.; Xiao, B.; Zeng, Y.; Lv, S.; Qian, J.; Du, Z. Fault Diagnosis of Hydropower Units Based on Gramian Angular Summation Field and Parallel CNN. Energies 2024, 17, 3084. [Google Scholar] [CrossRef]
- Dao, F.; Zeng, Y.; Zou, Y.; Qian, J. Fault diagnosis method for hydropower unit via the incorporation of chaotic quadratic interpolation optimized deep learning model. Measurement 2024, 237, 115199. [Google Scholar] [CrossRef]
- Chen, J.; Zheng, Y.; Deng, X.; Wang, Y.; Hu, W.; Xiao, Z. Design of a progressive fault diagnosis system for hydropower units considering unknown faults. Meas. Sci. Technol. 2024, 35, 015904. [Google Scholar] [CrossRef]
- Nawab, S.H.; Quatieri, T.F. Short-time Fourier transform. In Advanced Topics in Signal Processing; ACM: New York, NY, USA, 1987; pp. 289–337. [Google Scholar]
- Peng, Z.K.; Chu, F.L. Application of the wavelet transform in machine condition monitoring and fault diagnostics: A review with bibliography. Mech. Syst. Signal Process. 2004, 18, 199–221. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Miao, Y.; Zhang, B.; Li, C.; Lin, J.; Zhang, D. Feature Mode Decomposition: New Decomposition Theory for Rotating Machinery Fault Diagnosis. IEEE Trans. Ind. Electron. 2023, 70, 1949–1960. [Google Scholar] [CrossRef]
- Yan, X.; Jia, M. Bearing fault diagnosis via a parameter-optimized feature mode decomposition. Measurement 2022, 203, 112016. [Google Scholar] [CrossRef]
- Zuo, J.; Lin, J.; Miao, Y. Period enhanced feature mode decomposition and its application for bearing weak fault feature extraction. Meas. Sci. Technol. 2024, 35, 116127. [Google Scholar] [CrossRef]
- Meng, T.; Jiang, X.; Song, Q.; Hu, Z.; Guo, J.; Zhu, Z. Modified Feature Mode Decomposition Guided by Spectral Structure Information for Machinery Fault Diagnosis. IEEE Trans. Instrum. Meas. 2024, 73, 3525810. [Google Scholar] [CrossRef]
- Khalid, S.; Lim, W.; Kim, H.S.; Oh, Y.T.; Youn, B.D.; Kim, H.-S.; Bae, Y.-C. Intelligent Steam Power Plant Boiler Waterwall Tube Leakage Detection via Machine Learning-Based Optimal Sensor Selection. Sensors 2020, 20, 6356. [Google Scholar] [CrossRef] [PubMed]
- Khalid, S.; Hwang, H.; Kim, H.S. Real-World Data-Driven Machine-Learning-Based Optimal Sensor Selection Approach for Equipment Fault Detection in a Thermal Power Plant. Mathematics 2021, 9, 2814. [Google Scholar] [CrossRef]
- Lu, N.; Xiao, Z.; Zhang, G.; Sun, Z. Rotating machinery fault feature extraction based on adaptive multi-wavelets and synthesis distance evaluation index. J. Vib. Shock. 2014, 33, 194–210. [Google Scholar]
- Miao, Y.; Zhao, M.; Lin, J.; Lei, Y. Application of an improved maximum correlated kurtosis deconvolution method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2017, 92, 173–195. [Google Scholar] [CrossRef]
- Kundu, P.; Darpe, A.K.; Kulkarni, M.S. A correlation coefficient based vibration indicator for detecting natural pitting progression in spur gears. Mech. Syst. Signal Process. 2019, 129, 741–763. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | P1 | P2 | P3 | P4 | P5 |
|---|---|---|---|---|---|
| Equations | |||||
| Parameters | P6 | P7 | P8 | P9 | P10 |
| Equations |
| Parameters | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 | P10 |
|---|---|---|---|---|---|---|---|---|---|---|
| RM | 0.84 | 15.13 | 104.83 | 59.37 | 0.26 | 126.16 | 16.33 | 22.91 | 31.53 | 45.46 |
| HU | 0.08 | 0.46 | 0.23 | 1.38 | 0.09 | 4.85 | 0.70 | 1.13 | 0.29 | 0.78 |
| Experiments | Fault Recognition Result/% | Running Time/s |
|---|---|---|
| Hydro_CFMD | 94.44 | 49.53 |
| Hydro_FMD | 51.39 | 348.14 |
| Hydro_VMD | 80.85 | 268.66 |
| Rotor_CFMD | 98.75 | 134.02 |
| Rotor_FMD | 42.45 | 893.60 |
| Rotor_VMD | 58.75 | 181.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Gong, H.; Geng, Z.; Deng, J.; Yuan, F. Research on Fault Feature Extraction Method for Hydroelectric Generating Unit Based on Improved FMD and CDEI. Energies 2024, 17, 6134. https://doi.org/10.3390/en17236134
Wu T, Gong H, Geng Z, Deng J, Yuan F. Research on Fault Feature Extraction Method for Hydroelectric Generating Unit Based on Improved FMD and CDEI. Energies. 2024; 17(23):6134. https://doi.org/10.3390/en17236134
Chicago/Turabian StyleWu, Tao, Haipeng Gong, Zaiming Geng, Jian Deng, and Fang Yuan. 2024. "Research on Fault Feature Extraction Method for Hydroelectric Generating Unit Based on Improved FMD and CDEI" Energies 17, no. 23: 6134. https://doi.org/10.3390/en17236134
APA StyleWu, T., Gong, H., Geng, Z., Deng, J., & Yuan, F. (2024). Research on Fault Feature Extraction Method for Hydroelectric Generating Unit Based on Improved FMD and CDEI. Energies, 17(23), 6134. https://doi.org/10.3390/en17236134