
10 MW FOWT Semi-Submersible Multi-Objective Optimization: A Comparative Study of PSO, SA, and ACO



Abstract
1. Introduction
2. Methodology
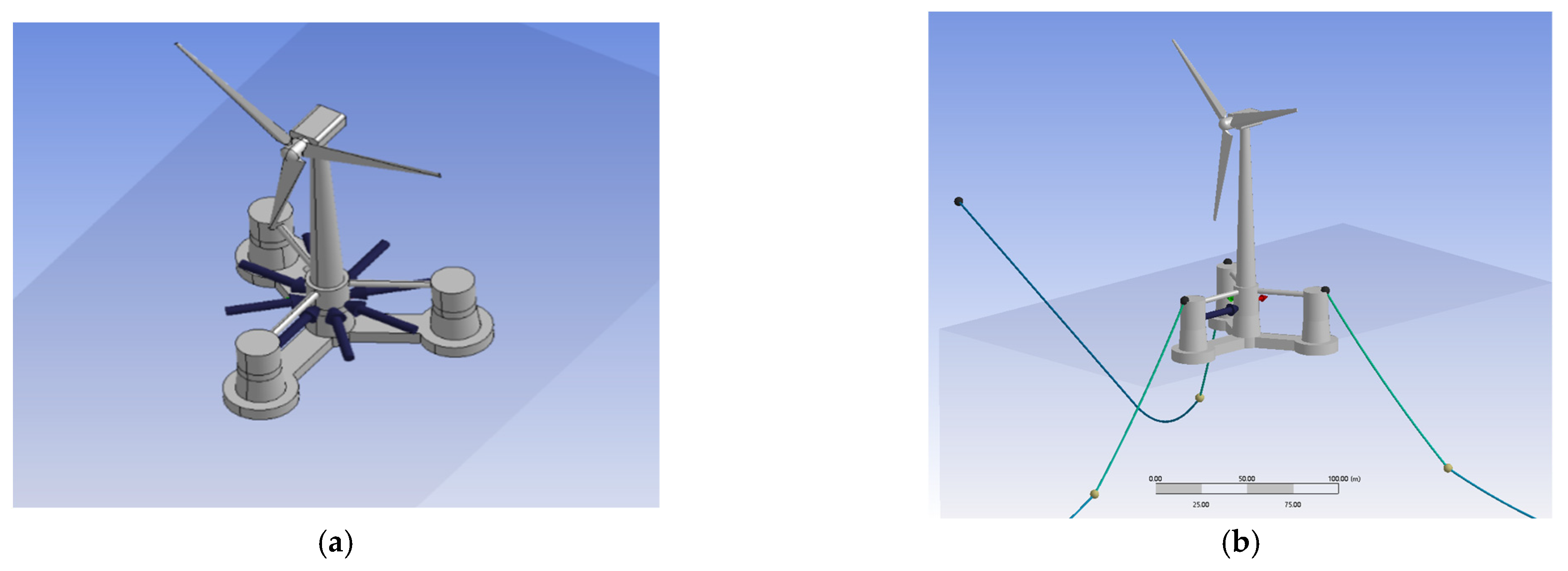
2.1. ZJUS10 FOWT System
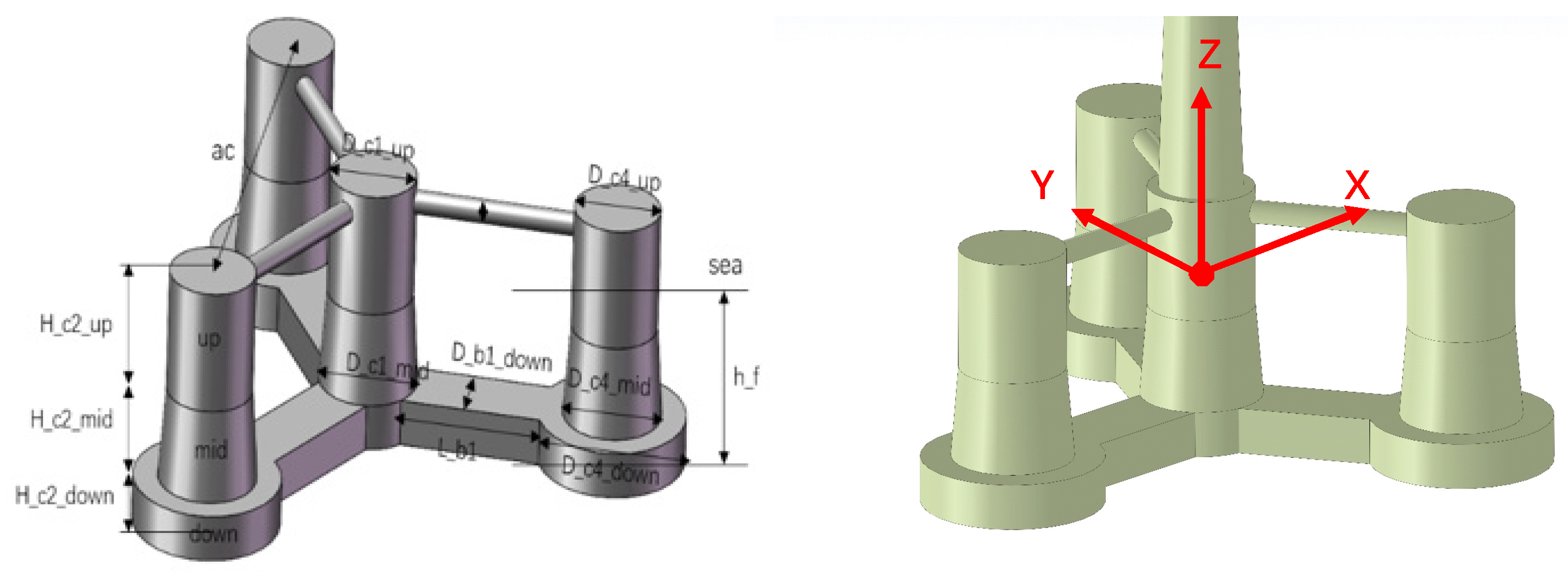
2.1.1. ZJUS10 Floating Platform
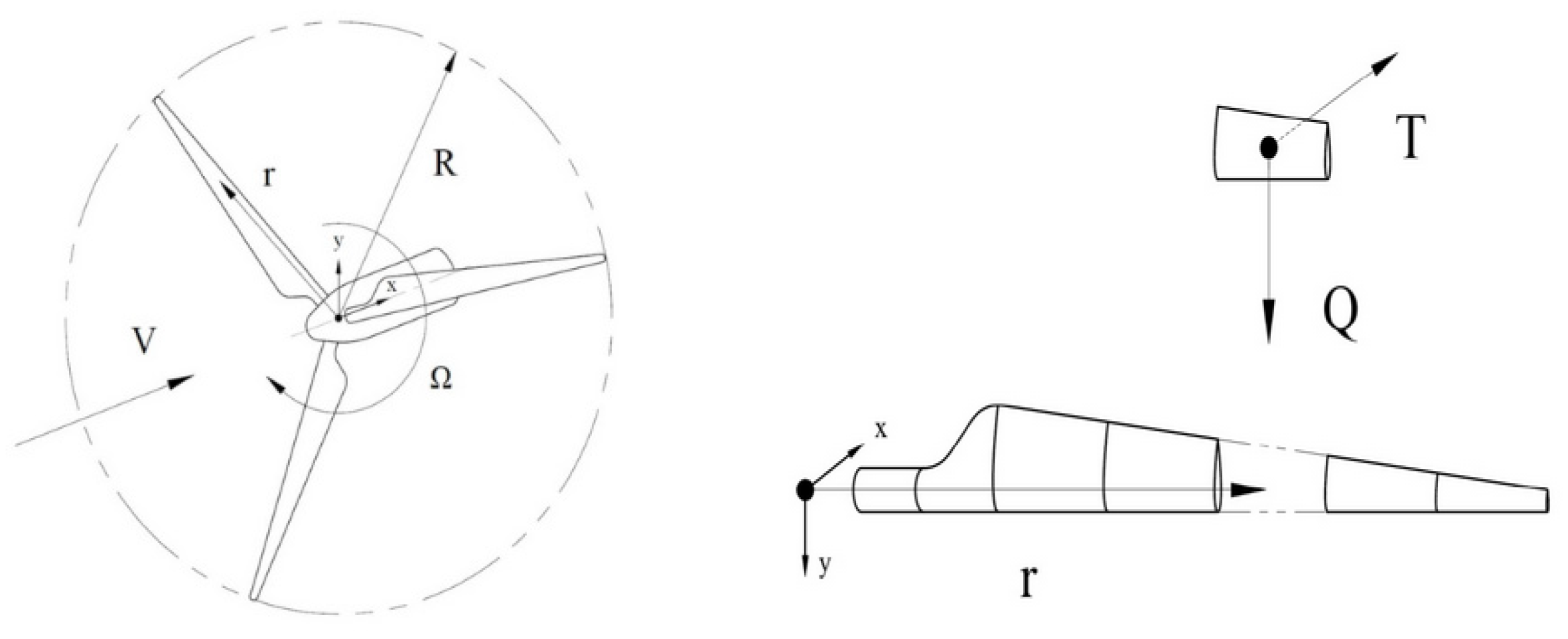
2.1.2. 10 MW Wind Turbine
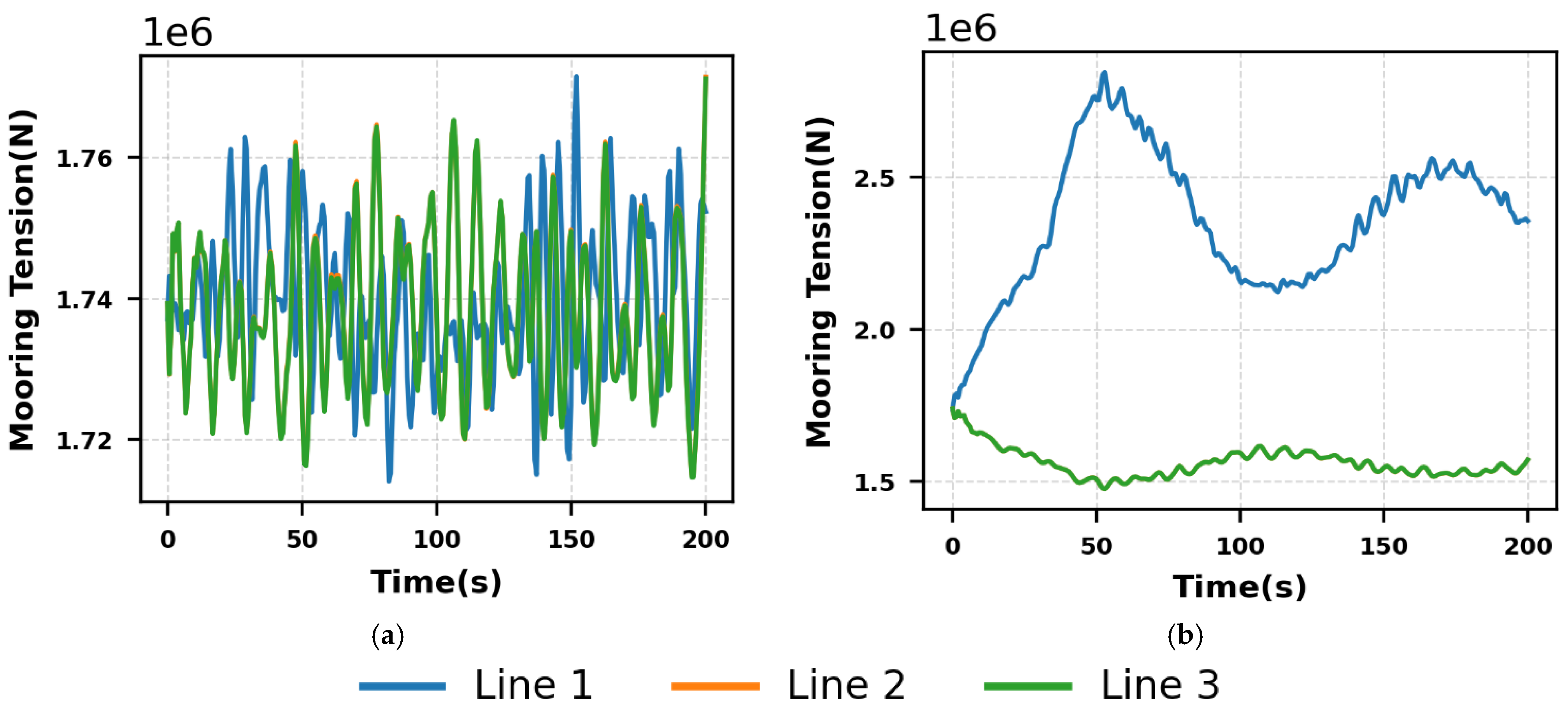
2.1.3. Catenary Mooring System
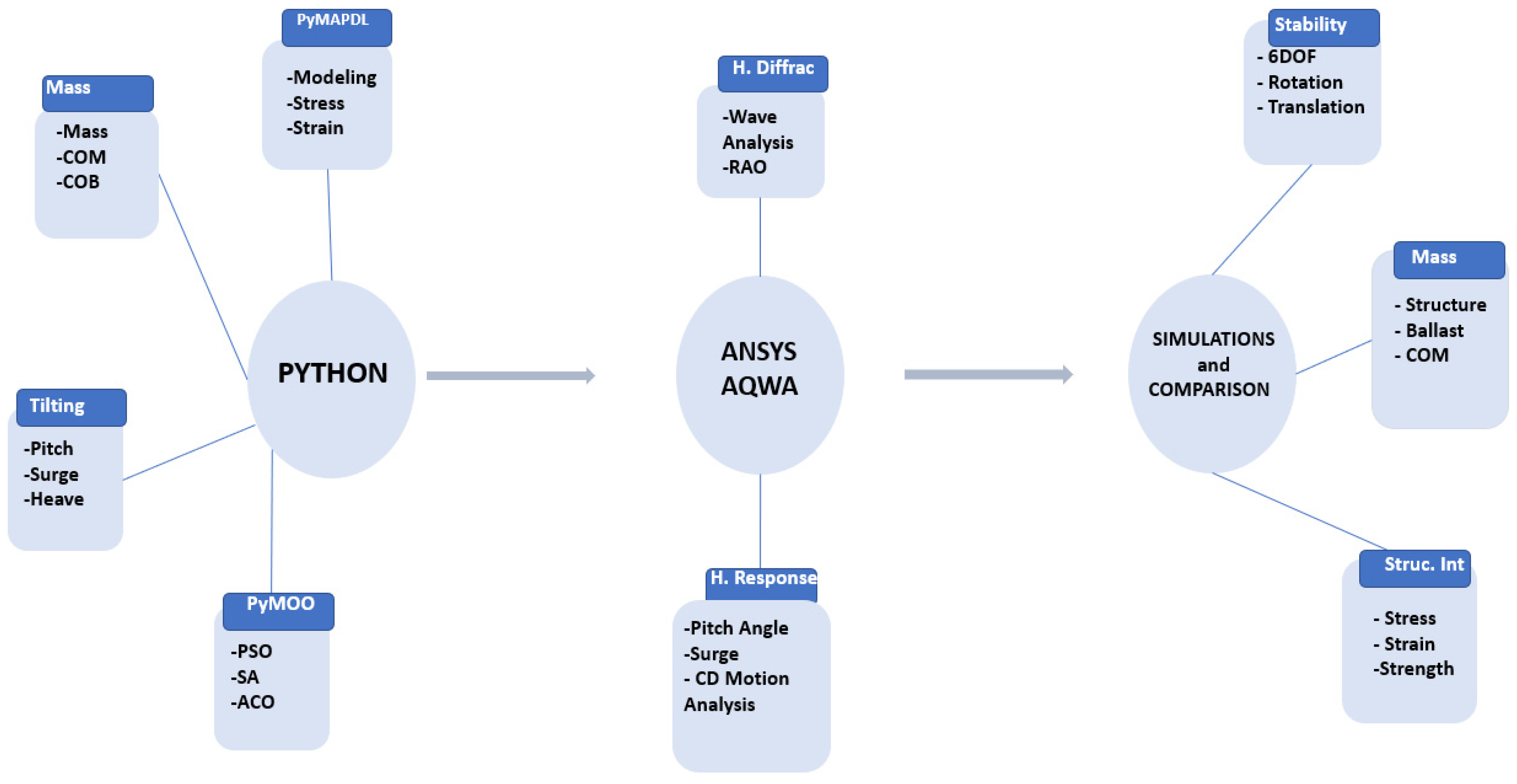
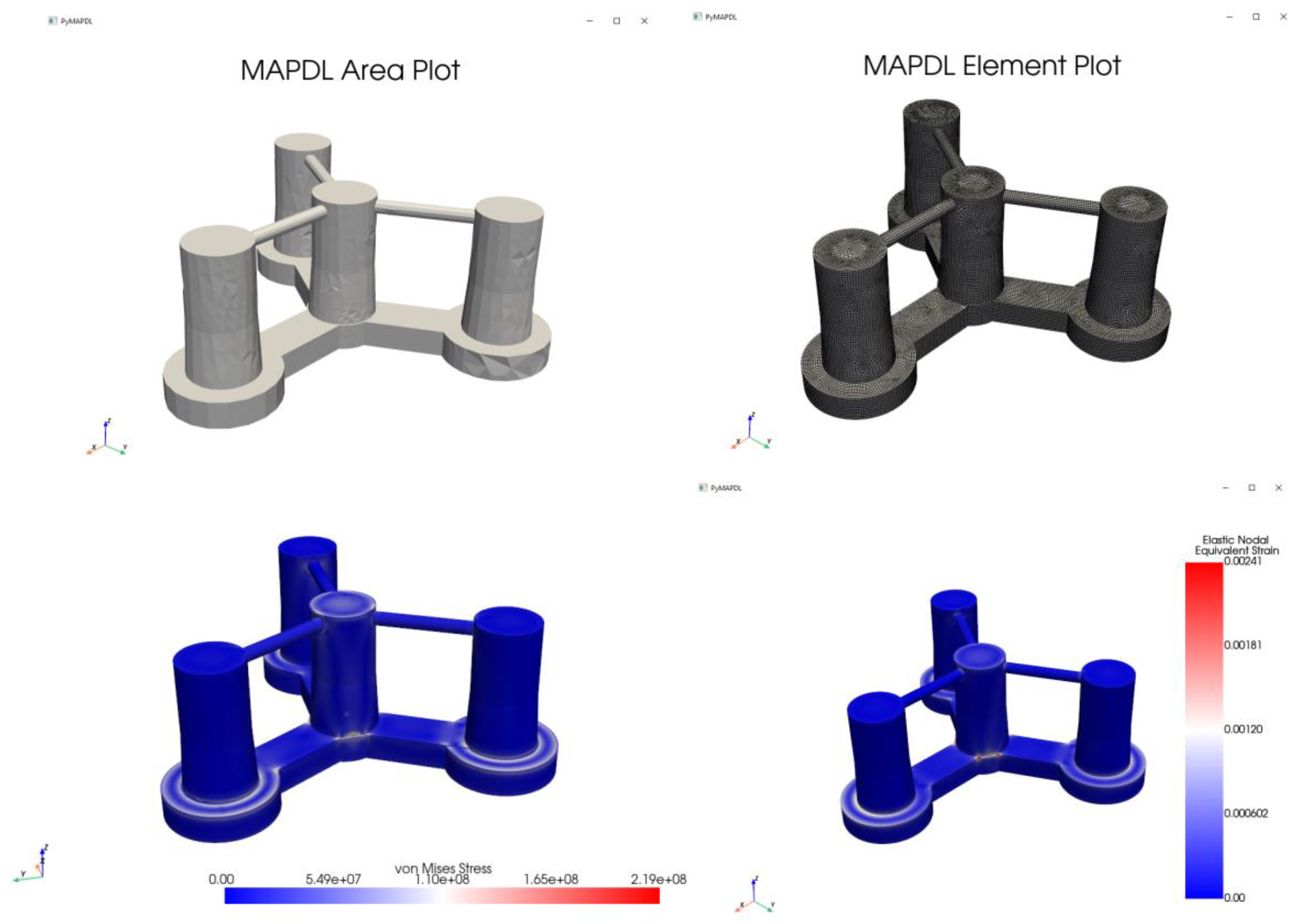
2.2. ZJUS10 System Analysis in Ansys
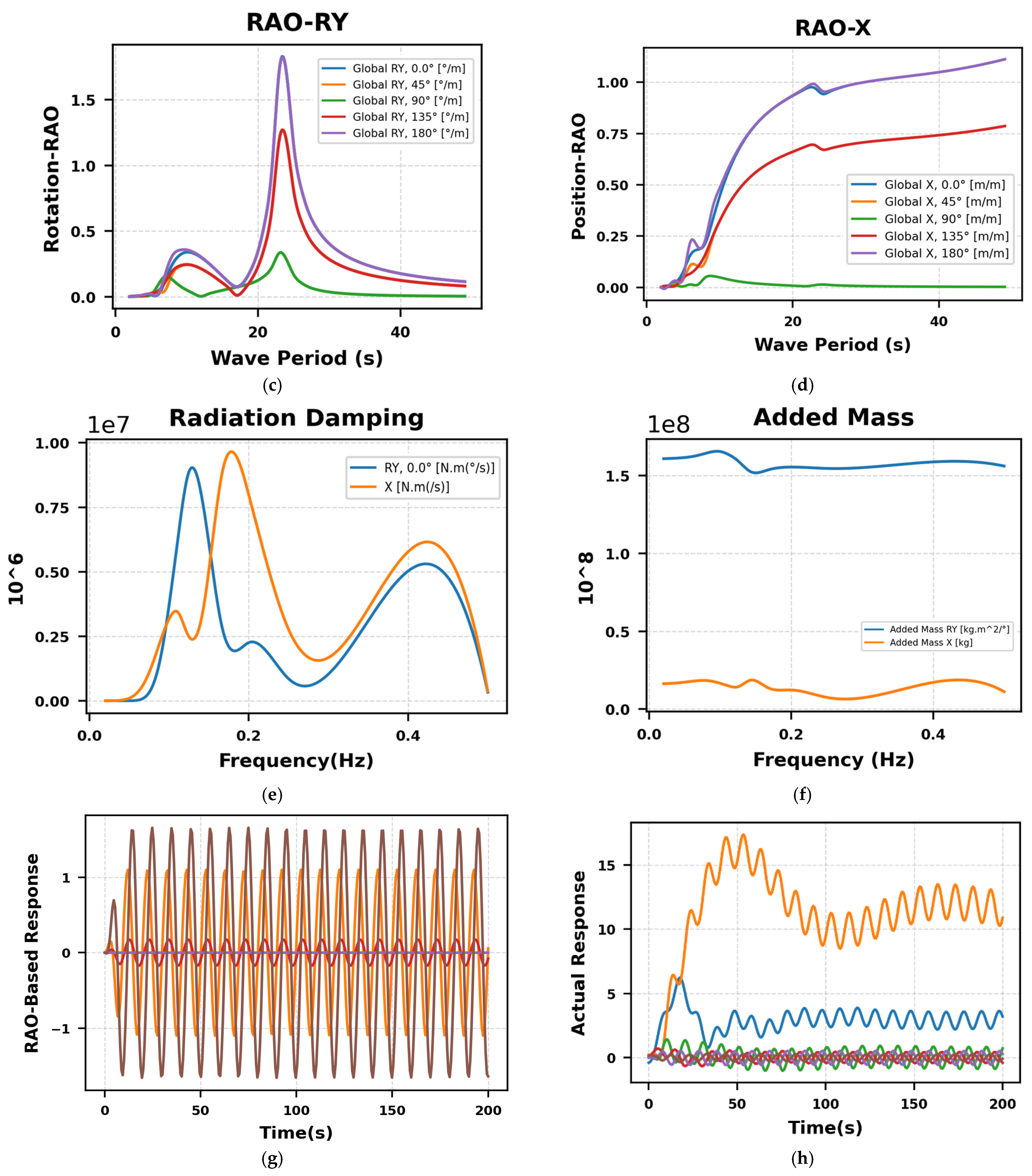
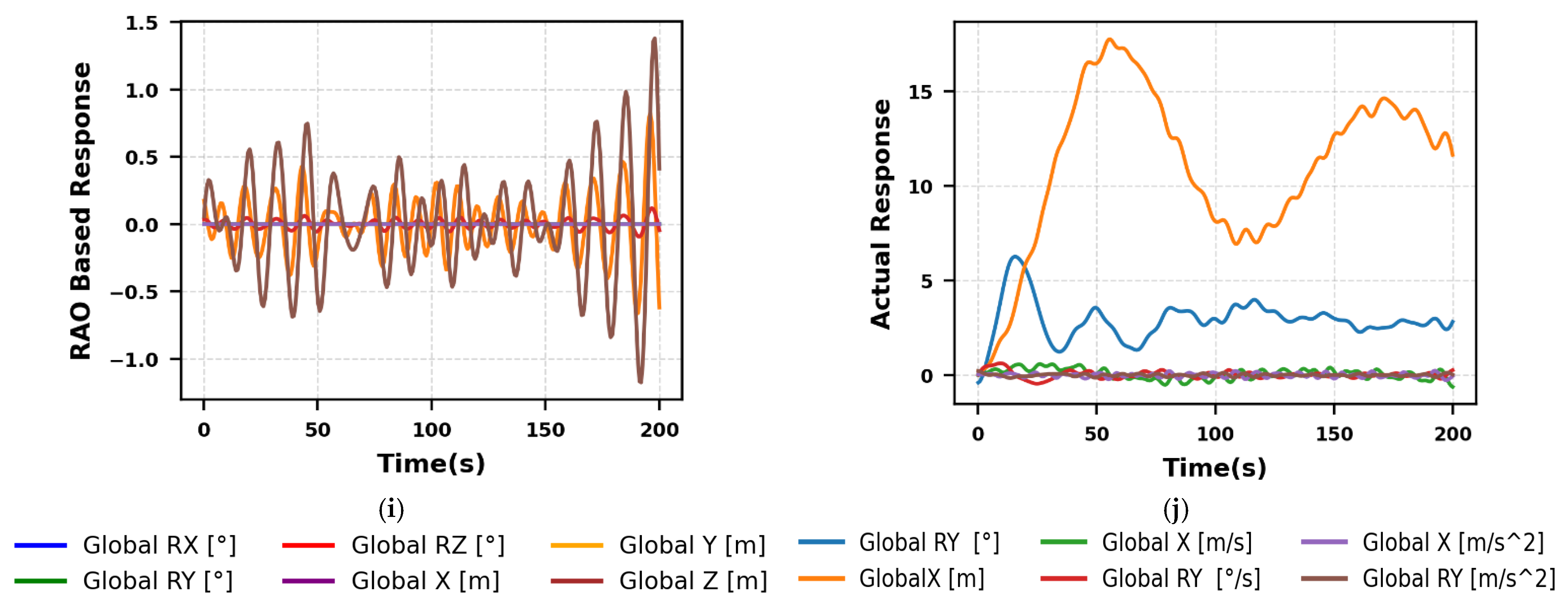
2.2.1. Coupled Dynamic Analysis
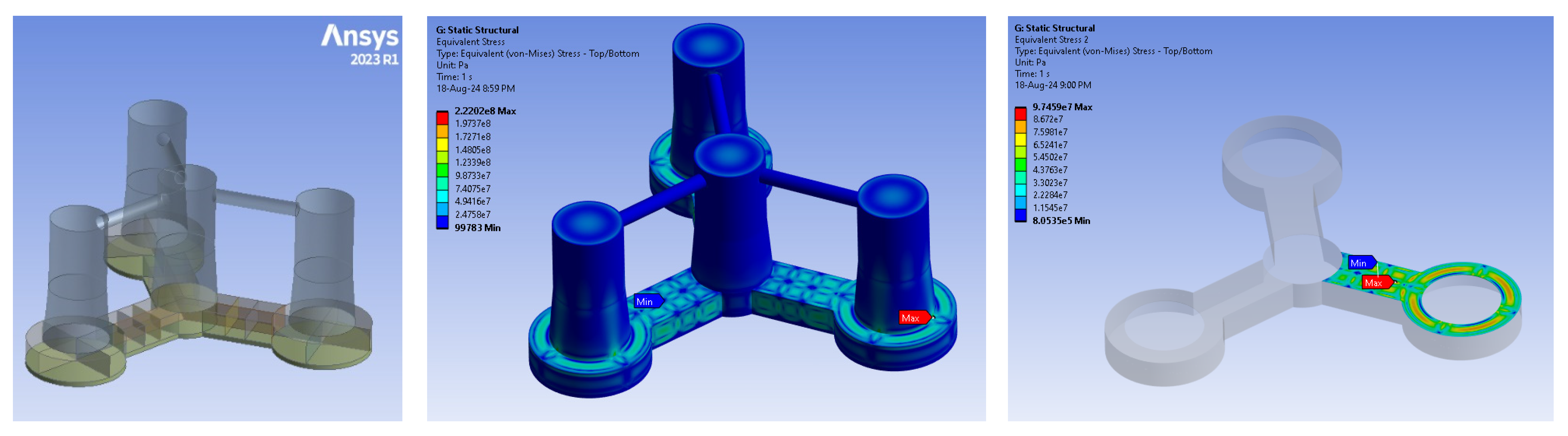
2.2.2. Structural Integrity Analysis
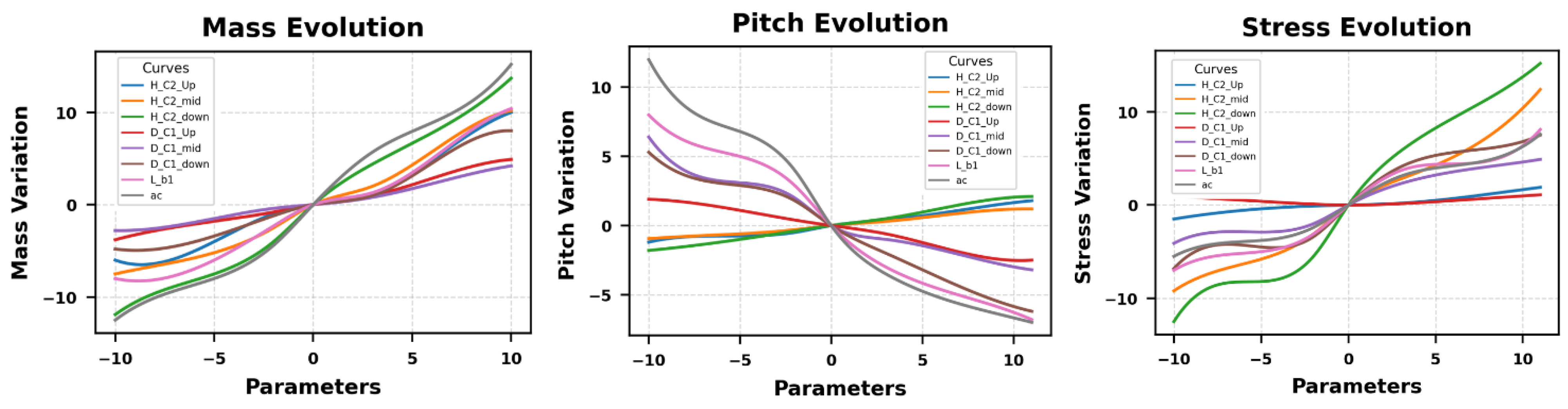
2.2.3. ZJUS10 Sensitivity Analysis
2.3. Problem Definition Optimization Objectives
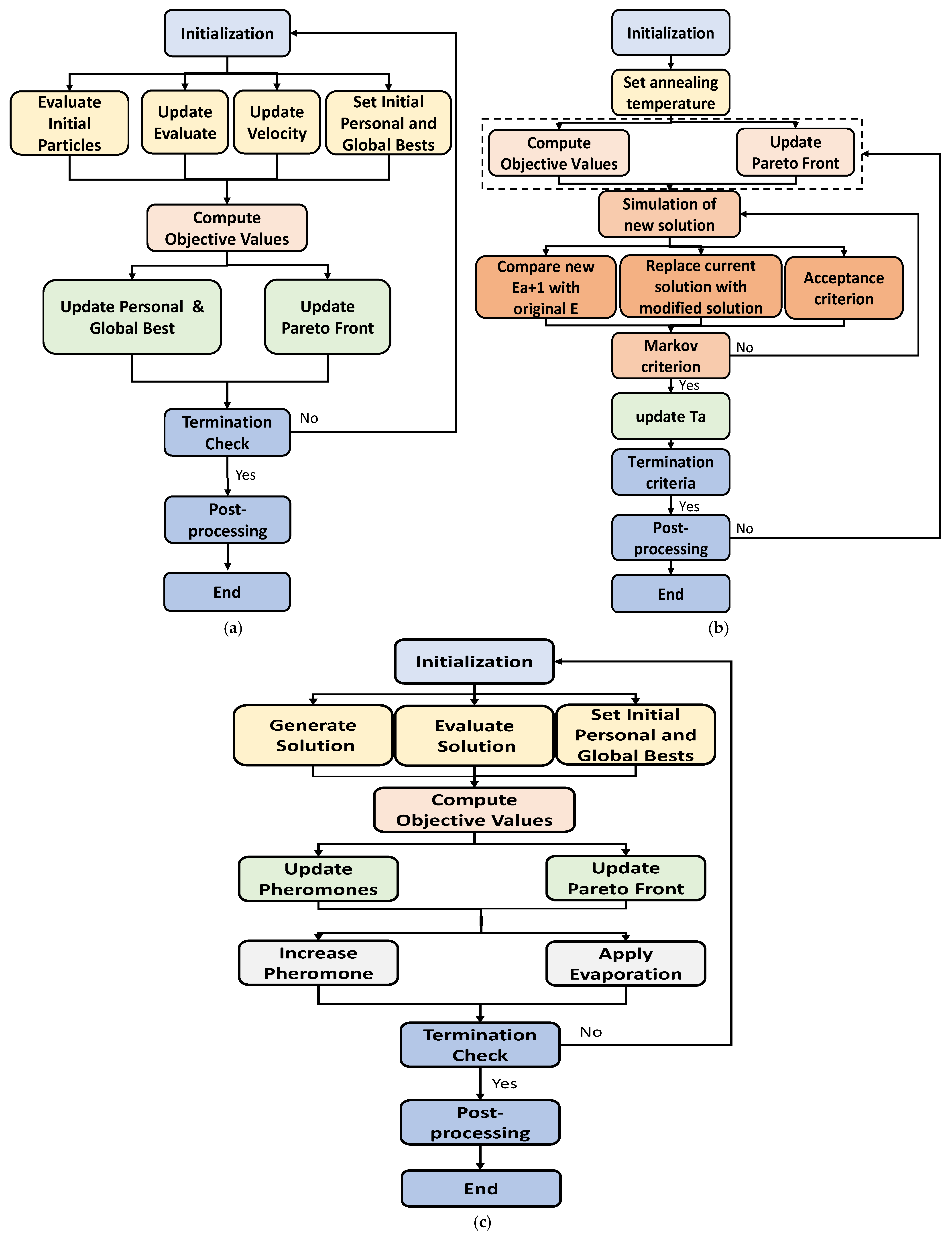
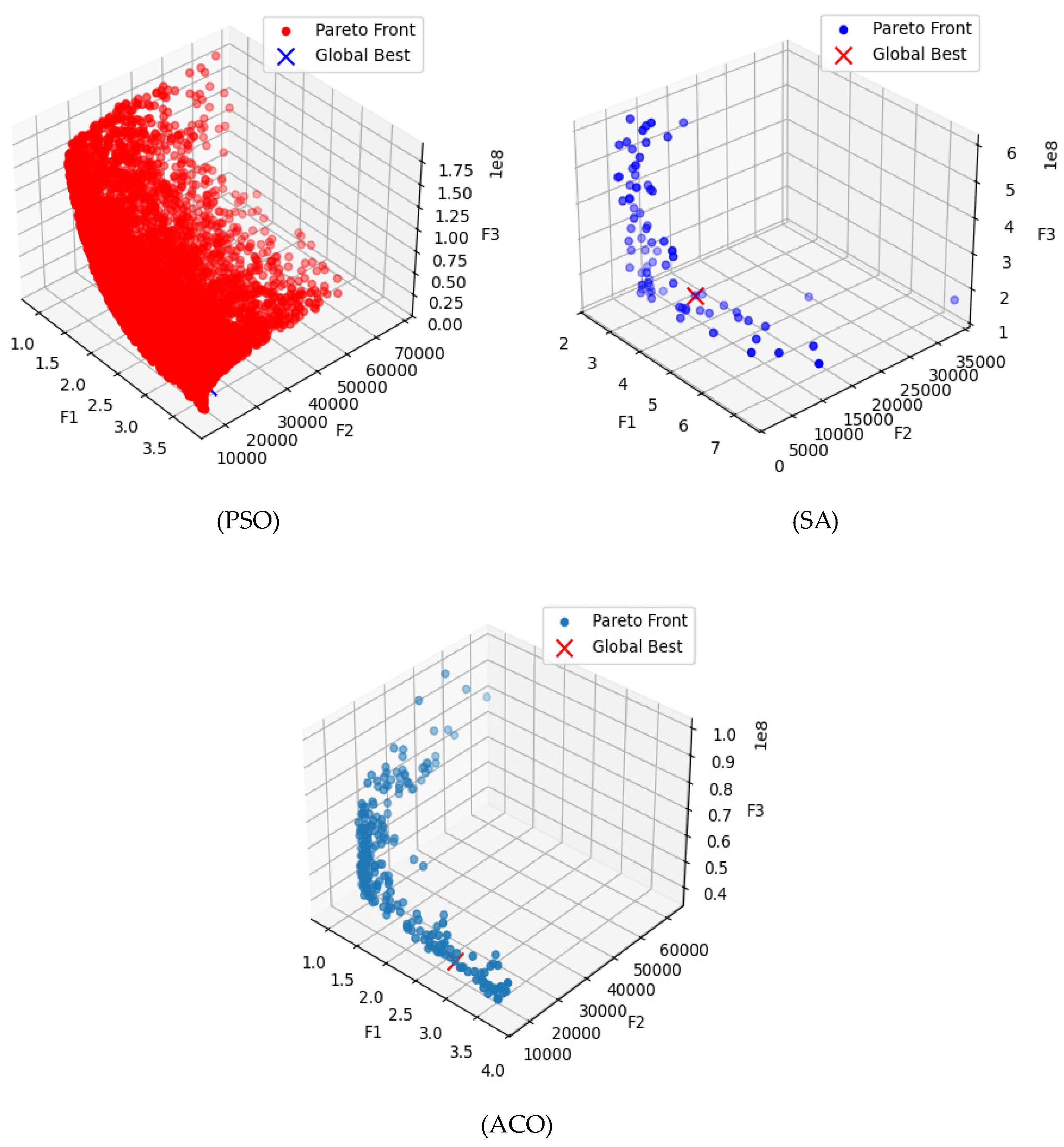
2.4. Optimization Methodology and Optimizers
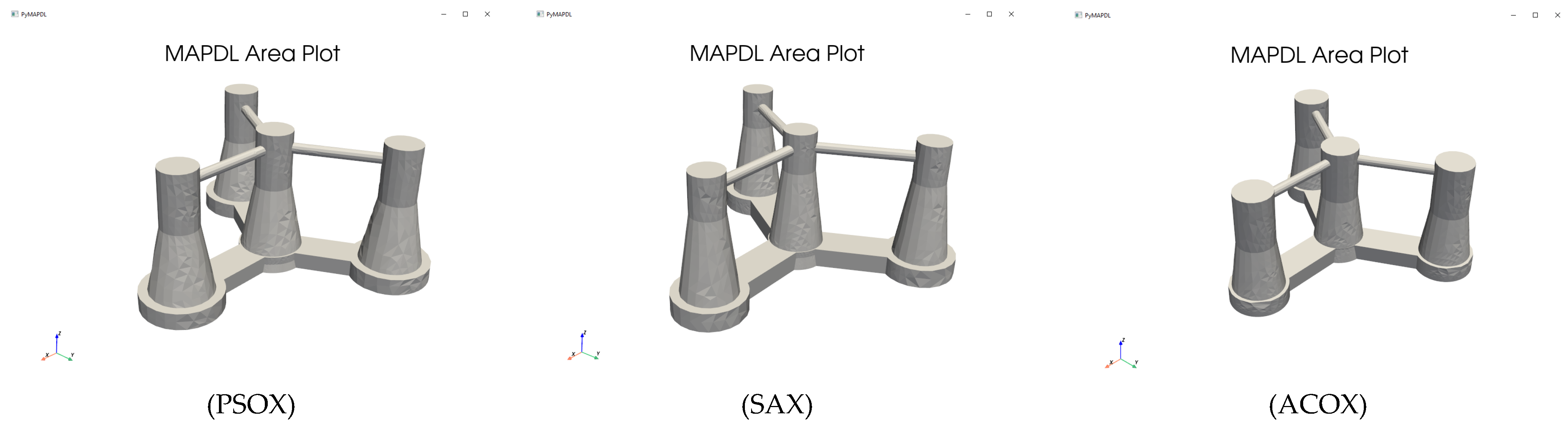
3. Results and Discussion
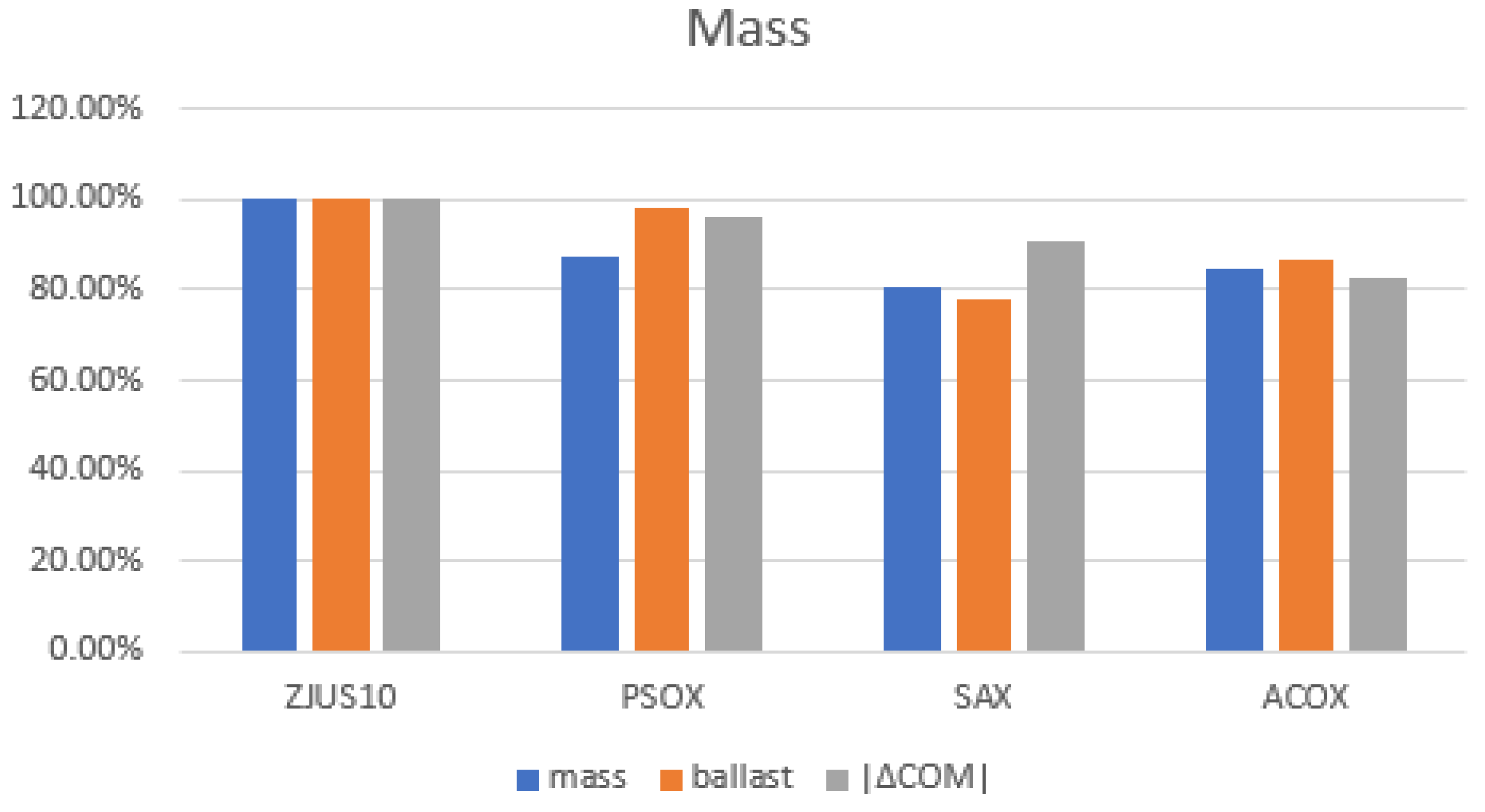
3.1. Mass Analysis
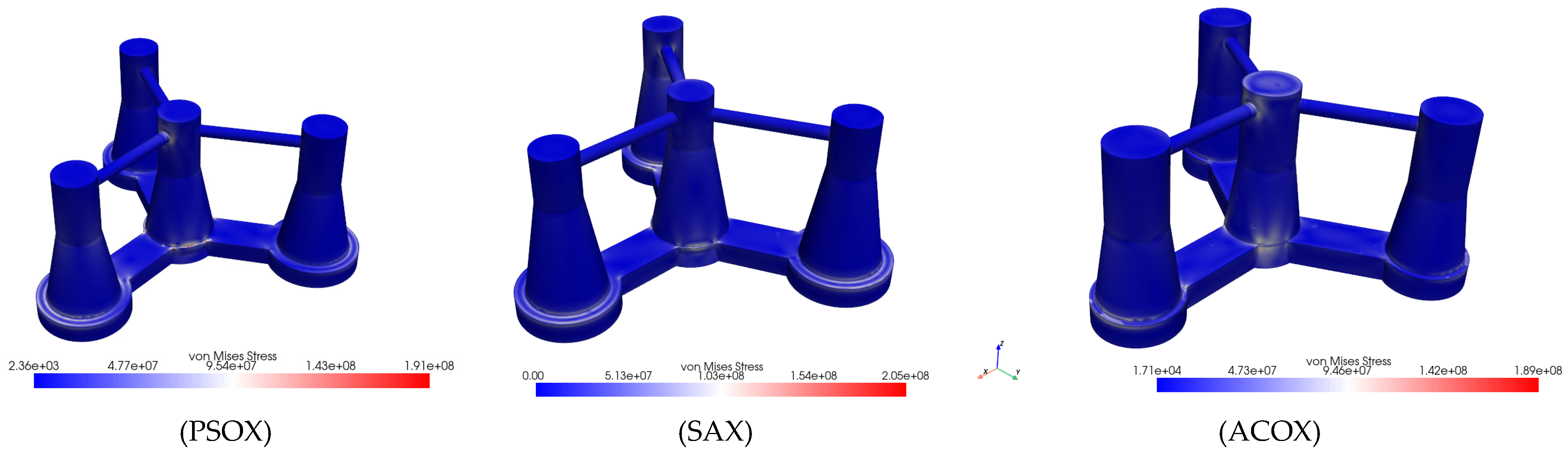
3.2. Stress Analysis
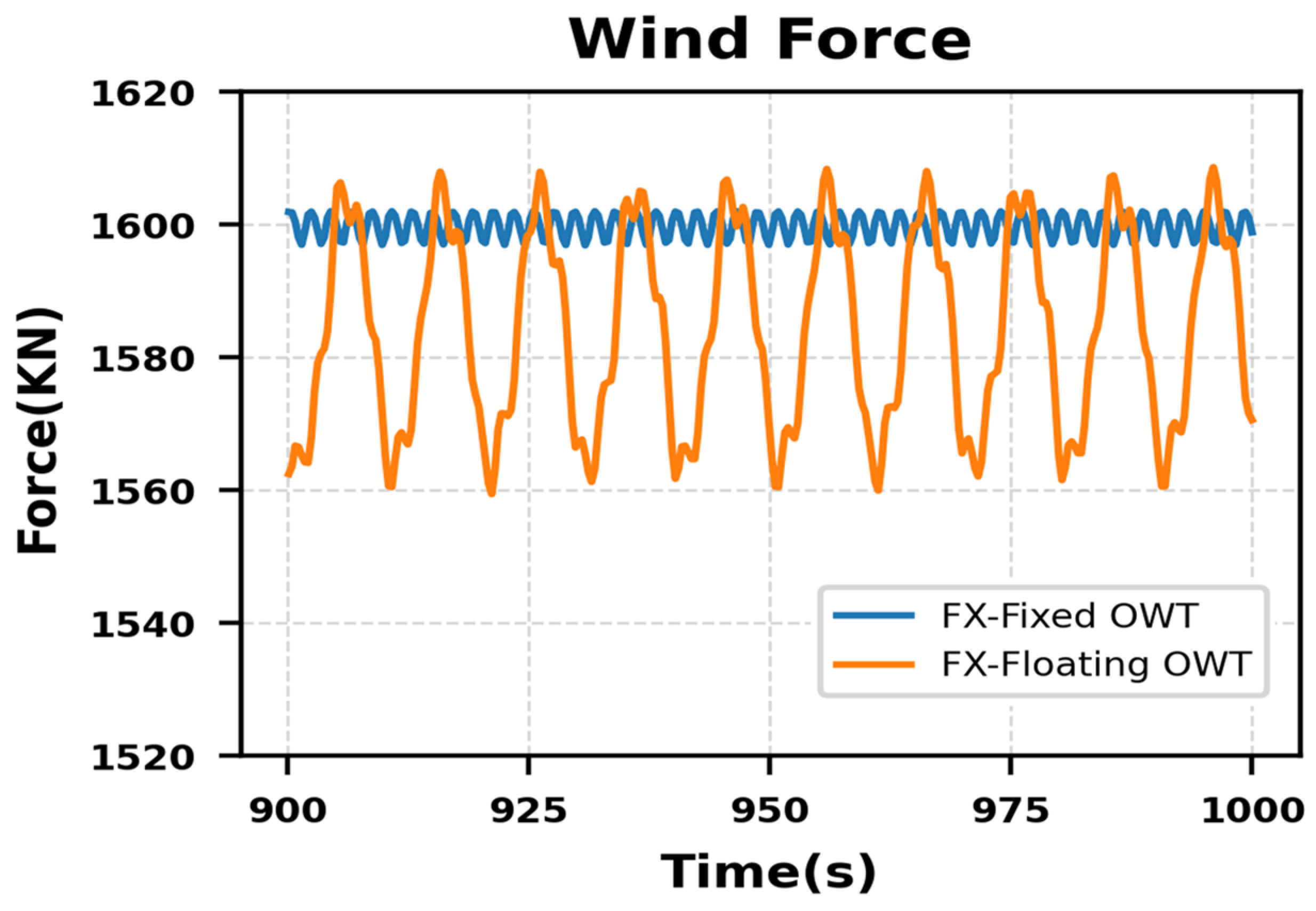
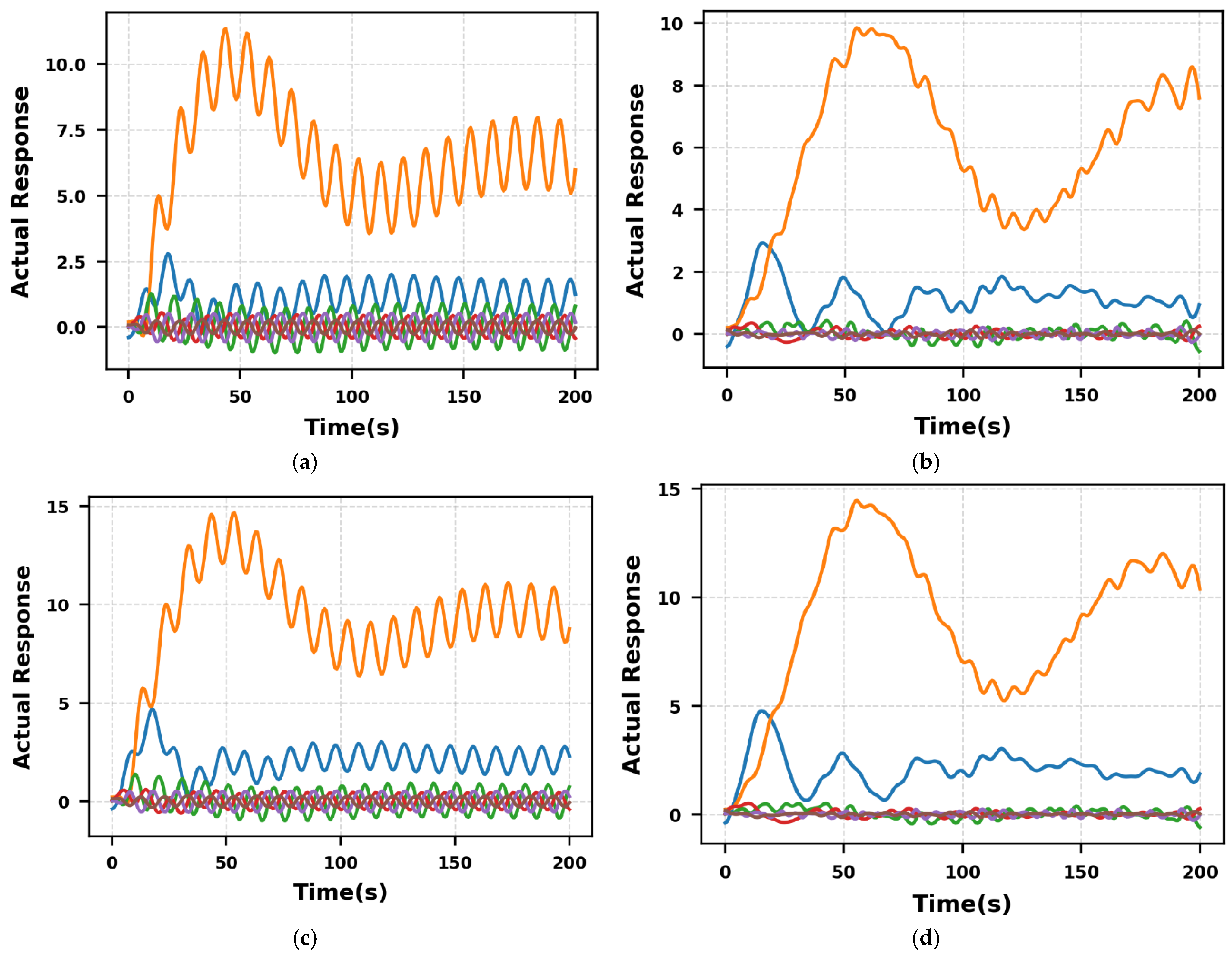
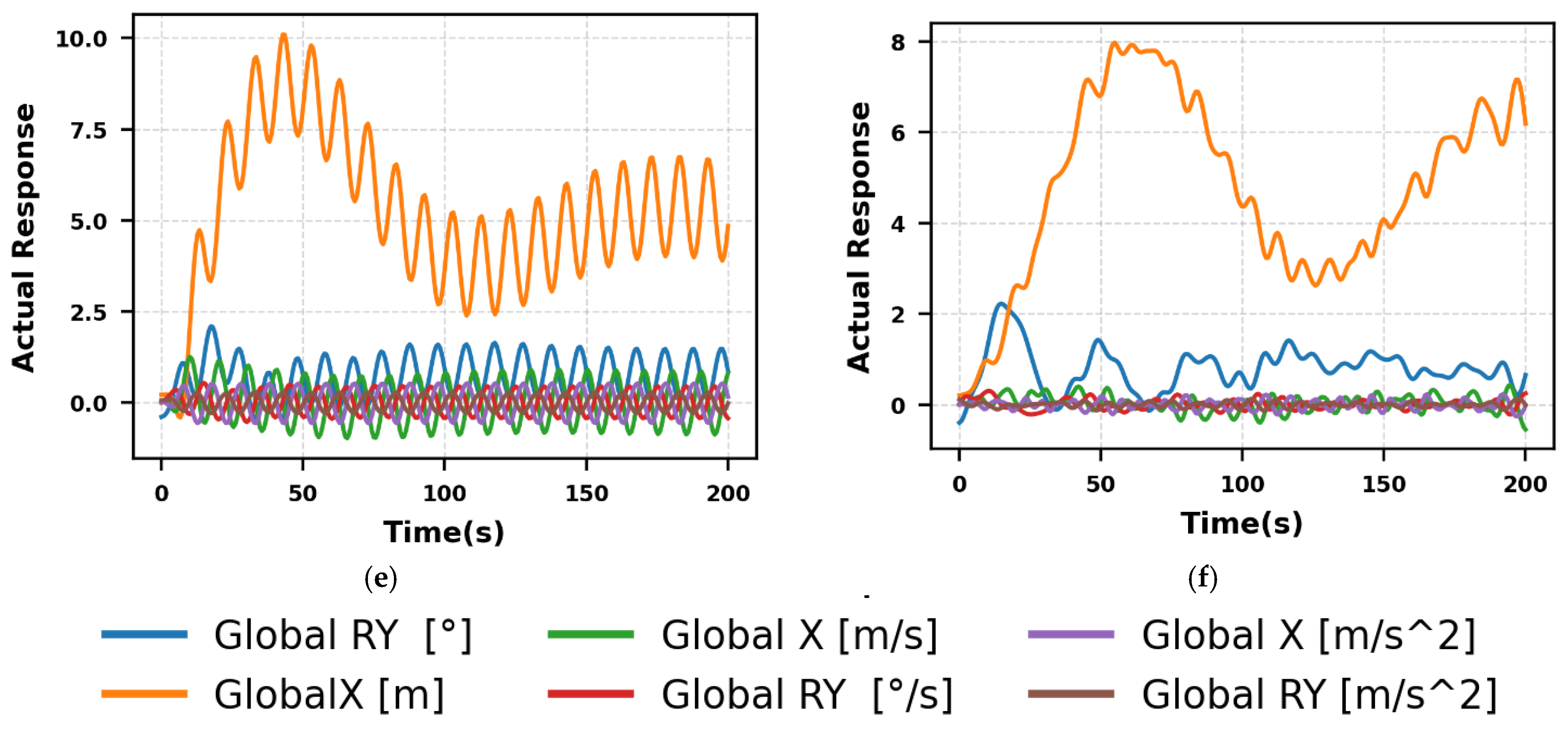
3.3. Hydrodynamic Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, X.; Huang, D.; Wu, G. The current state of offshore wind energy technology development. Energy 2012, 41, 298–312. [Google Scholar] [CrossRef]
- Kaldellis, J.; Kapsali, M. Shifting towards offshore wind energy—Recent activity and future development. Energy Policy 2013, 53, 136–148. [Google Scholar] [CrossRef]
- Díaz, H.; Soares, C.G. Review of the current status, technology and future trends of offshore wind farms. Ocean Eng. 2020, 209, 107381. [Google Scholar] [CrossRef]
- Barooni, M.; Ashuri, T.; Velioglu Sogut, D.; Wood, S.; Ghaderpour Taleghani, S. Floating offshore wind turbines: Current status and future prospects. Energies 2022, 16, 2. [Google Scholar] [CrossRef]
- Ha, K.; Truong, H.V.A.; Dang, T.D.; Ahn, K.K. Recent control technologies for floating offshore wind energy system: A review. Int. J. Precis. Eng. Manuf.-Green Technol. 2021, 8, 281–301. [Google Scholar]
- Qiao, D.; Ou, J. Global responses analysis of a semi-submersible platform with different mooring models in South China Sea. Ships Offshore Struct. 2013, 8, 441–456. [Google Scholar] [CrossRef]
- Chitteth Ramachandran, R.; Desmond, C.; Judge, F.; Serraris, J.-J.; Murphy, J. Floating wind turbines: Marine operations challenges and opportunities. Wind Energy Sci. 2022, 7, 903–924. [Google Scholar] [CrossRef]
- Asim, T.; Islam, S.Z.; Hemmati, A.; Khalid, M.S.U. A review of recent advancements in offshore wind turbine technology. Energies 2022, 15, 579. [Google Scholar] [CrossRef]
- Díaz, H.; Serna, J.; Nieto, J.; Guedes Soares, C. Market needs, opportunities and barriers for the floating wind industry. J. Mar. Sci. Eng. 2022, 10, 934. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Abdel-Fatah, L.; Sangaiah, A.K. Metaheuristic algorithms: A comprehensive review. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Elsevier: Amsterdam, The Netherlands, 2018; pp. 185–231. [Google Scholar]
- Minguijón, D.H.; Pérez-Rúa, J.-A.; Das, K.; Cutululis, N.A. Metaheuristic-based design and optimization of offshore wind farms collection systems. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Karl, F.; Pielok, T.; Moosbauer, J.; Pfisterer, F.; Coors, S.; Binder, M.; Schneider, L.; Thomas, J.; Richter, J.; Lang, M.; et al. Multi-objective hyperparameter optimization in machine learning—An overview. ACM Trans. Evol. Learn. Optim. 2023, 3, 1–50. [Google Scholar] [CrossRef]
- Morales-Hernández, A.; Van Nieuwenhuyse, I.; Rojas Gonzalez, S. A survey on multi-objective hyperparameter optimization algorithms for machine learning. Artif. Intell. Rev. 2023, 56, 8043–8093. [Google Scholar] [CrossRef]
- Wang, J.; Ren, Y.; Shi, W.; Collu, M.; Venugopal, V.; Li, X. Multi-objective optimization design for a 15 MW semisubmersible floating offshore wind turbine using evolutionary algorithm. Appl. Energy 2025, 377, 124533. [Google Scholar] [CrossRef]
- Boghdady, T.; Sayed, M.; Elzahab, E.A. Maximization of generated power from wind energy conversion system using a new evolutionary algorithm. Renew. Energy 2016, 99, 631–646. [Google Scholar] [CrossRef]
- Hakli, H. A new approach for wind turbine placement problem using modified differential evolution algorithm. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 4659–4672. [Google Scholar] [CrossRef]
- Christodoulou, C.A.; Vita, V.; Seritan, G.-C.; Ekonomou, L. A harmony search method for the estimation of the optimum number of wind turbines in a wind farm. Energies 2020, 13, 2777. [Google Scholar] [CrossRef]
- Özkan, R.; Genç, M.S. Aerodynamic design and optimization of a small-scale wind turbine blade using a novel artificial bee colony algorithm based on blade element momentum (ABC-BEM) theory. Energy Convers. Manag. 2023, 283, 116937. [Google Scholar] [CrossRef]
- Sharma, A.; Sharma, H.; Khandelwal, A.; Sharma, N. Designing controller parameter of wind turbine emulator using artificial bee colony algorithm. In Intelligent Learning for Computer Vision: Proceedings of Congress on Intelligent Systems 2020; Springer: Singapore, 2021; pp. 143–151. [Google Scholar]
- Maroufi, O.; Choucha, A.; Chaib, L. Hybrid fractional fuzzy PID design for MPPT-pitch control of wind turbine-based bat algorithm. Electr. Eng. 2020, 102, 2149–2160. [Google Scholar] [CrossRef]
- Su, Y.; Li, Q.; Duan, B.; Wu, Y.; Tan, M.; Qiao, H. A coordinative optimization method of active power and fatigue distribution in onshore wind farms. Int. Trans. Electr. Energy Syst. 2017, 27, e2392. [Google Scholar] [CrossRef]
- Charhouni, N.; Sallaou, M.; Mansouri, K. Realistic wind farm design layout optimization with different wind turbines types. Int. J. Energy Environ. Eng. 2019, 10, 307–318. [Google Scholar] [CrossRef]
- Yang, K.; Cho, K. Simulated annealing algorithm for wind farm layout optimization: A benchmark study. Energies 2019, 12, 4403. [Google Scholar] [CrossRef]
- Mu, A.; Huang, Z.; Liu, A.; Wang, J.; Yang, B.; Qian, Y. Optimal model reference adaptive control of spar-type floating wind turbine based on simulated annealing algorithm. Ocean Eng. 2022, 255, 111474. [Google Scholar] [CrossRef]
- Chen, P.; Song, L.; Chen, J.-H.; Hu, Z. Simulation annealing diagnosis algorithm method for optimized forecast of the dynamic response of floating offshore wind turbines. J. Hydrodyn. 2021, 33, 216–225. [Google Scholar] [CrossRef]
- Park, Y.; Jang, B.-S.; Du Kim, J. Hull-form optimization of semi-submersible FPU considering seakeeping capability and structural weight. Ocean Eng. 2015, 104, 714–724. [Google Scholar] [CrossRef]
- Chen, R.; Zhang, Z.; Hu, J.; Zhao, L.; Li, C.; Zhang, X. Grouping-based optimal design of collector system topology for a large-scale offshore wind farm by improved simulated annealing. Prot. Control Mod. Power Syst. 2024, 9, 94–111. [Google Scholar] [CrossRef]
- Rahman, M.; Ong, Z.C.; Chong, W.T.; Julai, S.; Ng, X.W. Wind turbine tower modeling and vibration control under different types of loads using ant colony optimized PID controller. Arab. J. Sci. Eng. 2019, 44, 707–720. [Google Scholar] [CrossRef]
- Wen, X. Modeling and performance evaluation of wind turbine based on ant colony optimization-extreme learning machine. Appl. Soft Comput. 2020, 94, 106476. [Google Scholar] [CrossRef]
- Eroğlu, Y.; Seçkiner, S.U. Early fault prediction of a wind turbine using a novel ANN training algorithm based on ant colony optimization. J. Energy Syst. 2019, 3, 139–147. [Google Scholar] [CrossRef]
- Zhao, X. Optimal allocation of wind power hybrid energy storage capacity based on ant colony optimization algorithm. Eng. Optim. 2024, 1–17. [Google Scholar] [CrossRef]
- Gu, B.; Meng, H.; Ge, M.; Zhang, H.; Liu, X. Cooperative multiagent optimization method for wind farm power delivery maximization. Energy 2021, 233, 121076. [Google Scholar] [CrossRef]
- Tang, X.-Y.; Yang, Q.; Stoevesandt, B.; Sun, Y. Optimization of wind farm layout with optimum coordination of turbine cooperations. Comput. Ind. Eng. 2022, 164, 107880. [Google Scholar] [CrossRef]
- Song, D.; Shen, G.; Huang, C.; Huang, Q.; Yang, J.; Dong, M.; Joo, Y.H.; Duić, N. Review on the application of artificial intelligence methods in the control and design of offshore wind power systems. J. Mar. Sci. Eng. 2024, 12, 424. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, A.; Yang, L.; Hu, C.; Bai, Y. Investigation on optimization design of offshore wind turbine blades based on particle swarm optimization. Energies 2019, 12, 1972. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, Y.; Chen, D. Assessment of offshore wind resources, based on improved particle swarm optimization. Appl. Sci. 2022, 13, 51. [Google Scholar] [CrossRef]
- Feng, X.; Lin, Y.; Gu, Y.; Li, D.; Chen, B.; Liu, H.; Sun, Y. Preliminary stability design method and hybrid experimental validation of a floating platform for 10 MW wind turbine. Ocean Eng. 2023, 285, 115401. [Google Scholar] [CrossRef]
- Feng, X.; Lin, Y.; Gu, Y.; Zhao, X.; Liu, H.; Sun, Y. Indirect load measurement method and experimental verification of floating offshore wind turbine. Ocean Eng. 2024, 303, 117734. [Google Scholar] [CrossRef]
- Feng, X.; Huang, P.; Lin, Y. The hybrid model test of floating offshore wind turbine based on an aerodynamic actuation system. In Proceedings of the International Joint Conference on Civil and Marine Engineering (JCCME 2023), Dalian, China, 3–6 November 2023; IET: London, UK, 2023; Volume 3, p. 6. [Google Scholar]
- Dorrego-Portela, J.R.; Ponce-Martínez, A.E.; Pérez-Chaltell, E.; Peña-Antonio, J.; Mateos-Mendoza, C.A.; Robles-Ocampo, J.B.; Sevilla-Camacho, P.Y.; Aviles, M.; Rodríguez-Reséndiz, J. Angle Calculus-Based Thrust Force Determination on the Blades of a 10 kW Wind Turbine. Technologies 2024, 12, 22. [Google Scholar] [CrossRef]
- Rocha, M.; Schnaid, F.; Rocha, C.; Amaral, C. Inverse catenary load attenuation along embedded ground chain of mooring lines. Ocean Eng. 2016, 122, 215–226. [Google Scholar] [CrossRef]
- Azcona, J.; Munduate, X.; González, L.; Nygaard, T.A. Experimental validation of a dynamic mooring lines code with tension and motion measurements of a submerged chain. Ocean Eng. 2017, 129, 415–427. [Google Scholar] [CrossRef]
- Iooss, B.; Saltelli, A. Introduction to sensitivity analysis. In Handbook of Uncertainty Quantification; Springer: Cham, Switzerland, 2017; pp. 1103–1122. [Google Scholar]
- Saltelli, A.; Annoni, P. Sensitivity Analysis; Springer: Berlin/Heidelber, Germany, 2011. [Google Scholar]
- Bredmose, H.; Lemmer, F.; Borg, M.; Pegalajar-Jurado, A.; Mikkelsen, R.F.; Larsen, T.S.; Fjelstrup, T.; Yu, W.; Lomholt, A.K.; Boehm, L.; et al. The Triple Spar campaign: Model tests of a 10MW floating wind turbine with waves, wind and pitch control. Energy Procedia 2017, 137, 58–76. [Google Scholar] [CrossRef]
- Blank, J.; Deb, K. Pymoo: Multi-Objective Optimization in Python. IEEE Access 2020, 8, 89497–89509. [Google Scholar] [CrossRef]
- pso. Available online: https://github.com/topics/pso (accessed on 17 December 2020).
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Shami, T.M.; El-Saleh, A.A.; Alswaitti, M.; Al-Tashi, Q.; Summakieh, M.A.; Mirjalili, S. Particle swarm optimization: A comprehensive survey. IEEE Access 2022, 10, 10031–10061. [Google Scholar] [CrossRef]
- Delahaye, D.; Chaimatanan, S.; Mongeau, M. Simulated annealing: From basics to applications. In Handbook of Metaheuristics; Springer: Cham, Switzerland, 2019; pp. 1–35. [Google Scholar]
- Guilmeau, T.; Chouzenoux, E.; Elvira, V. Simulated annealing: A review and a new scheme. In Proceedings of the 2021 IEEE statistical signal processing workshop (SSP), Rio de Janeiro, Brazil, 11–14 July 2021; pp. 101–105. [Google Scholar]
- Dorigo, M.; Stützle, T. Ant Colony Optimization: Overview and Recent Advances; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Chopard, B.; Tomassini, M.; Chopard, B.; Tomassini, M. Simulated annealing. In An Introduction to Metaheuristics for Optimization; Springer: Cham, Switzerland, 2018; pp. 59–79. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Draft | 22 |
| Airgap | 12 |
| H_c2_up | 16 |
| H_c2_mid | 12 |
| H_c2_down | 6 |
| D_c1_up | 14 |
| D_c1_mid | 16 |
| D_c1_down | 16 |
| ac | 69 |
| Width, d | 10 |
| Rod diameter, r | 3 |
| Parameter | Value |
|---|---|
| Rated power | 10 MW |
| Rated wind speed | 11.4 m/s |
| Rated rotation speed | 9.6 RPM |
| Rated blade tip speed | 90 m/s |
| Rotor, hub diameter | 178.3 m, 5.6 m |
| Hub height | 119 m |
| Shaft tilt, pre-cone | 5°, 2.5° |
| Parameter | Value |
|---|---|
| Equivalent mass (air) | 375 kg/m |
| Equivalent mass (water) | 3200 N/m |
| Extensional stiffness (EA) | 1.51 × N |
| Added mass coefficient | 0.8 |
| Damping coefficient | 2.0 |
| Catenary diameter | 0.137 m |
| Pretension | 1.67 × N |
| Parameters to Optimize | Initial Values | Bound Constraints |
|---|---|---|
| ac | 69 | [, β]; [, λ] |
| D_c1_up | 9.1 | [, β]; [, λ] |
| D_c1_mid | 16 | [, β]; [, λ] |
| D_c1_down | 19.3 | [, β]; [, λ] |
| D_b1_down | 10 | [, β]; [, λ] |
| H_c1_up | 16 | [, β]; [, λ] |
| H_c1_mid | 12 | [, β]; [, λ] |
| H_c1_down | 6 | [, β]; [, λ] |
| D_b1_up | 3 | [, β]; [, λ] |
| Parameters | PSOX | SAX | ACOX |
|---|---|---|---|
| ac | 71.2 | 74.7 | 70.4 |
| D_c1_up | 9.1 | 22 | 11.8 |
| D_c1_mid | 16 | 17 | 17.9 |
| D_c1_down | 19.3 | 25 | 19.9 |
| D_b1_down | 9.6 | 8 | 11.3 |
| H_c1_up | 11.2 | 6 | 17.1 |
| H_c1_mid | 25.2 | 14 | 15.9 |
| H_c1_down | 5.4 | 2 | 5.4 |
| D_b1_up | 2.9 | 3 | 3.2 |
| Objectives | ZJUS10 | PSOX | SAX | ACOX |
|---|---|---|---|---|
| Mass + ballast | 2.4 | 2.11 | 1.92 | 1.94 |
| Pitch (static, dynamic) | 3.9, 5.6 | 3.3, 3.1 | 2.4, 4.7 | 1.9, 2.3 |
| Max stress | 2.2 | 1.91 | 1.99 | 1.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drabo, S.; Lai, S.; Liu, H.; Feng, X. 10 MW FOWT Semi-Submersible Multi-Objective Optimization: A Comparative Study of PSO, SA, and ACO. Energies 2024, 17, 5914. https://doi.org/10.3390/en17235914
Drabo S, Lai S, Liu H, Feng X. 10 MW FOWT Semi-Submersible Multi-Objective Optimization: A Comparative Study of PSO, SA, and ACO. Energies. 2024; 17(23):5914. https://doi.org/10.3390/en17235914
Chicago/Turabian StyleDrabo, Souleymane, Siqi Lai, Hongwei Liu, and Xiangheng Feng. 2024. "10 MW FOWT Semi-Submersible Multi-Objective Optimization: A Comparative Study of PSO, SA, and ACO" Energies 17, no. 23: 5914. https://doi.org/10.3390/en17235914
APA StyleDrabo, S., Lai, S., Liu, H., & Feng, X. (2024). 10 MW FOWT Semi-Submersible Multi-Objective Optimization: A Comparative Study of PSO, SA, and ACO. Energies, 17(23), 5914. https://doi.org/10.3390/en17235914