
Fault Diagnosis Method for Hydropower Units Based on Dynamic Mode Decomposition and the Hiking Optimization Algorithm–Extreme Learning Machine

Abstract
1. Introduction
2. Fundamental Theory
2.1. Dynamic Mode Decomposition
- (1)
- Construct the matrix.
- (2)
- Perform Singular Value Decomposition (SVD) on matrix X, that is,where are orthogonal matrices; is a diagonal matrix.
- (3)
- Construct the matrix, that is,where
- (4)
- Perform an eigenvalue decomposition on , that is,
- (5)
- Reconstruct the eigenvalue decomposition of , where the eigenvalues of are given by , and the eigenvector matrix of is given by W and U, that is,
- (6)
- Determine growth rate Re() and frequency of the dynamic modes by taking the logarithm of the eigenvalues, that is,
- (7)
- Project the vibration data at the initial time onto the original flow field to obtain the modal energy , which is expressed as follows:
- (8)
- Express the initial amplitude vector b as follows:Solve for the approximate solution at any future time.
2.2. Multidimensional Feature Extraction
- (1)
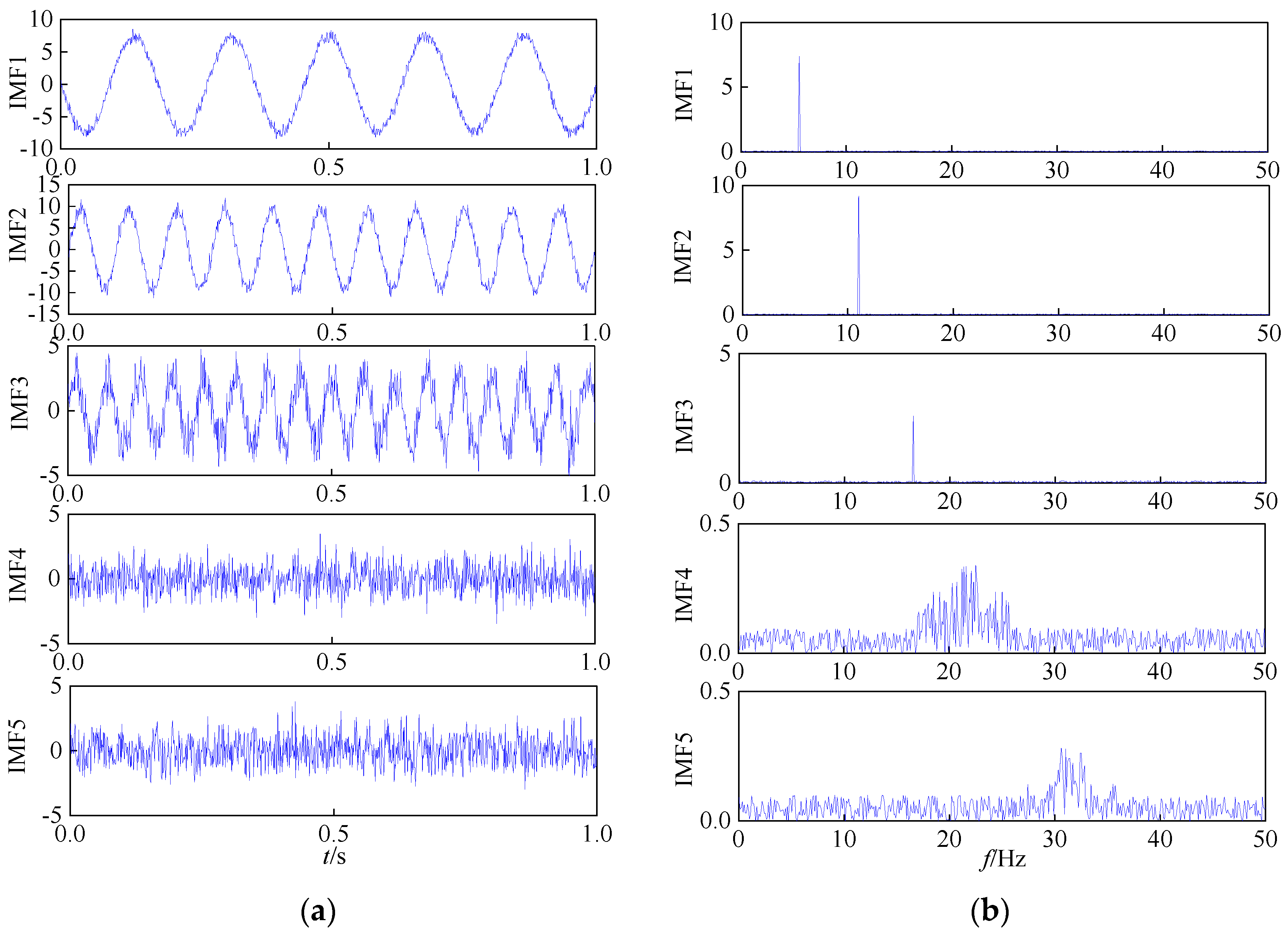
- Utilize the DMD method to decompose the original vibration signal into a series of Intrinsic Mode Function (IMF) components.
- (2)
- Calculate the energy entropy features [21], denoted as EFi, for each IMF component.where represents the energy value of each IMF component, and denotes the total energy of all IMF components.
- (3)
- Calculate the root mean square (RMS) features [22], denoted as , for each IMF component.
- (4)
- Calculate the singular value features [23], denoted as , for the corresponding IMF components of the original signal.where A denotes the matrix constructed from the IMF components, and Um×m and Vn×n are the left and right singular matrices of A, respectively. Λ is an m × n diagonal matrix, and λ1, λ2, …, λk are the singular values of matrix A.
- (1)
- The input data samples are converted into a standardized matrix.
- (2)
- The computation of the correlation coefficient matrix is executed based on the standardized matrix, as delineated by Equation (18).where the term is designated as the correlation coefficient between the variables and ; n is the number of samples; m is the number of features; is the arithmetic mean of the i-th variable; is the arithmetic mean of the j-th variable; denotes the value of the i-th feature within the s-th sample; and denotes the value of the j-th feature within the s-th sample.
- (3)
- The eigenvalue problem associated with the correlation matrix G is solved to ascertain the eigenvalues λ along with their respective eigenvectors.
- (4)
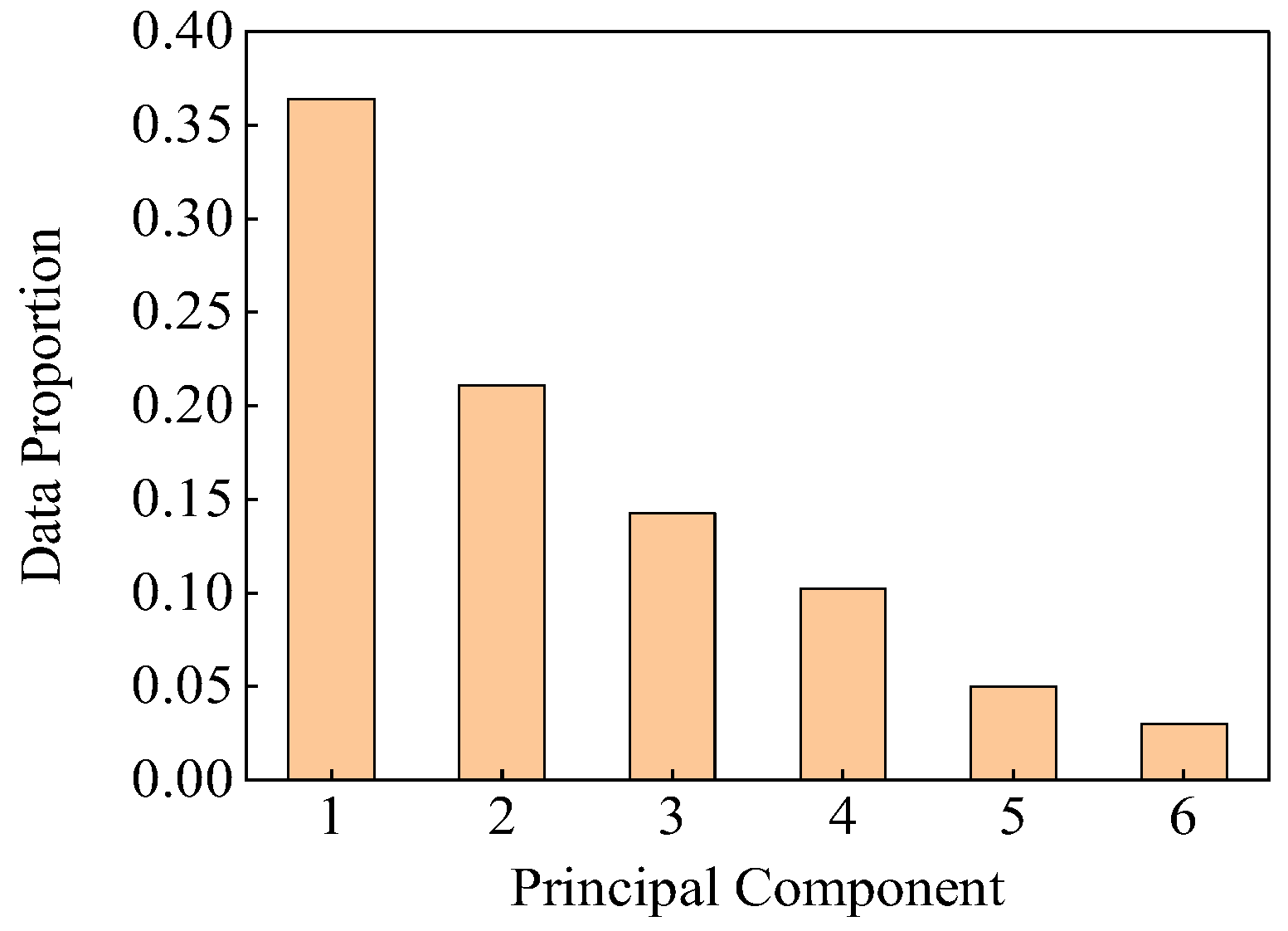
- Employing Equations (19) and (20), the contribution rate and the cumulative contribution rate are computed [25].
- (5)
- The number of principal components, denoted as k, is determined by the cumulative contribution rate of the explained variance. When the cumulative sum of the current k eigenvalues exceeds 90% of the total, the corresponding value of k is regarded as the number of principal components.
2.3. Hiking Optimization Algorithm
| Algorithm 1: HOA |
| Input: UB, LB, T, I, d 4: for i ← 1 to I do ← Evaluate a hiker’s fitness 6: end for ← Initial best fitness of the hikers 8: for t ← 1 to T do ← Determine the best fitness hiker 11: for i ← 1 to I do ← Extract initial position of hiker i ← Determine trail/terrain angle of elevation ← Compute the slope using (22) ←Compute the initial hiking velocity using (21) ← Determine the actual velocity of hiker i using (23) ←Update the hiker’s position using (24) within LB and UB then 22: end if 23: end for 25: end for 27: return |
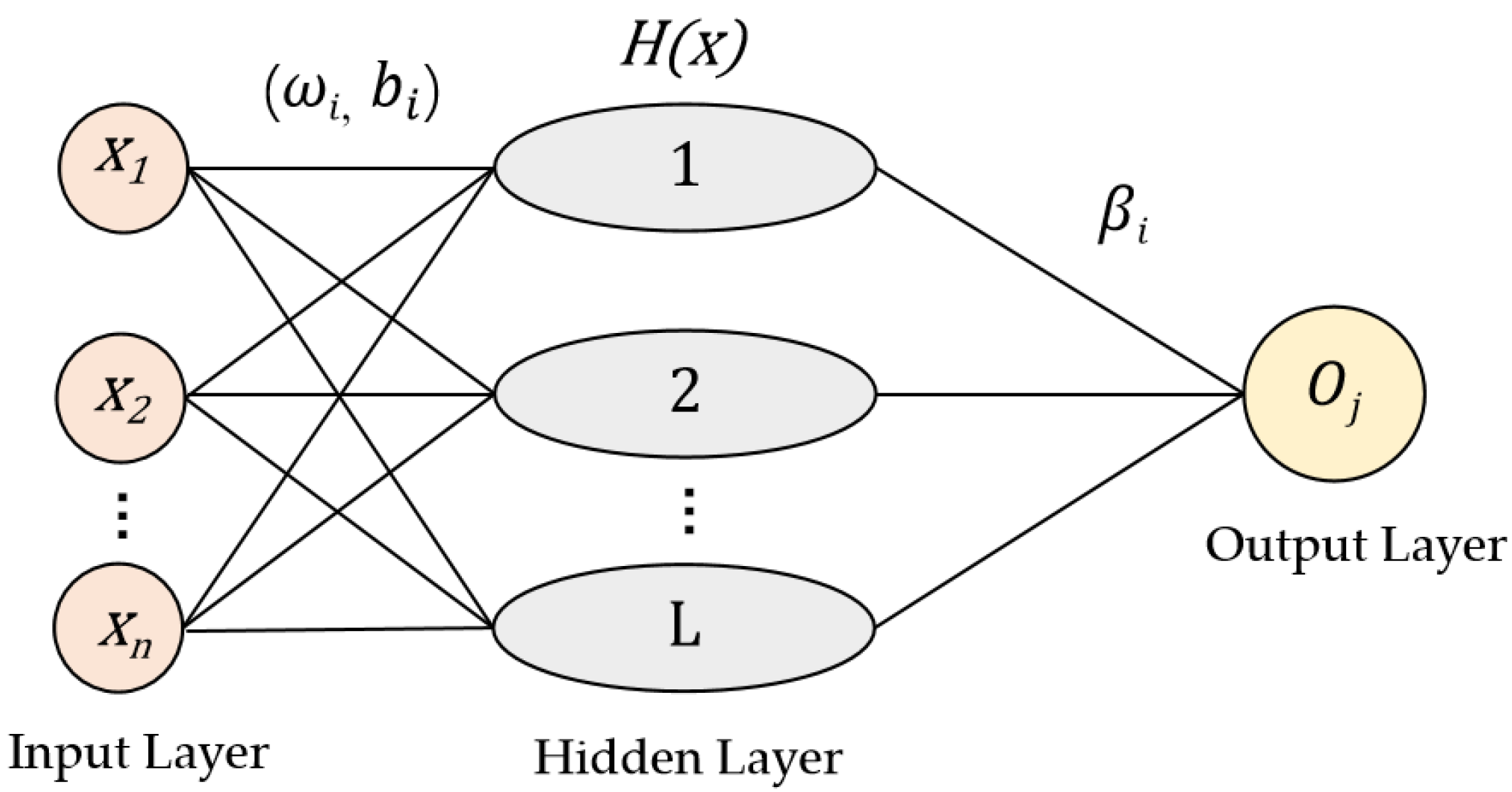
2.4. Extreme Learning Machine
- (1)
- Establish the specific structure of the feedforward neural network;
- (2)
- Randomly set the parameters and of the feedforward neural network;
- (3)
- Solve for the minimum norm least squares solution of the output weight matrix .
2.5. HOA-Optimized ELM Classification Model
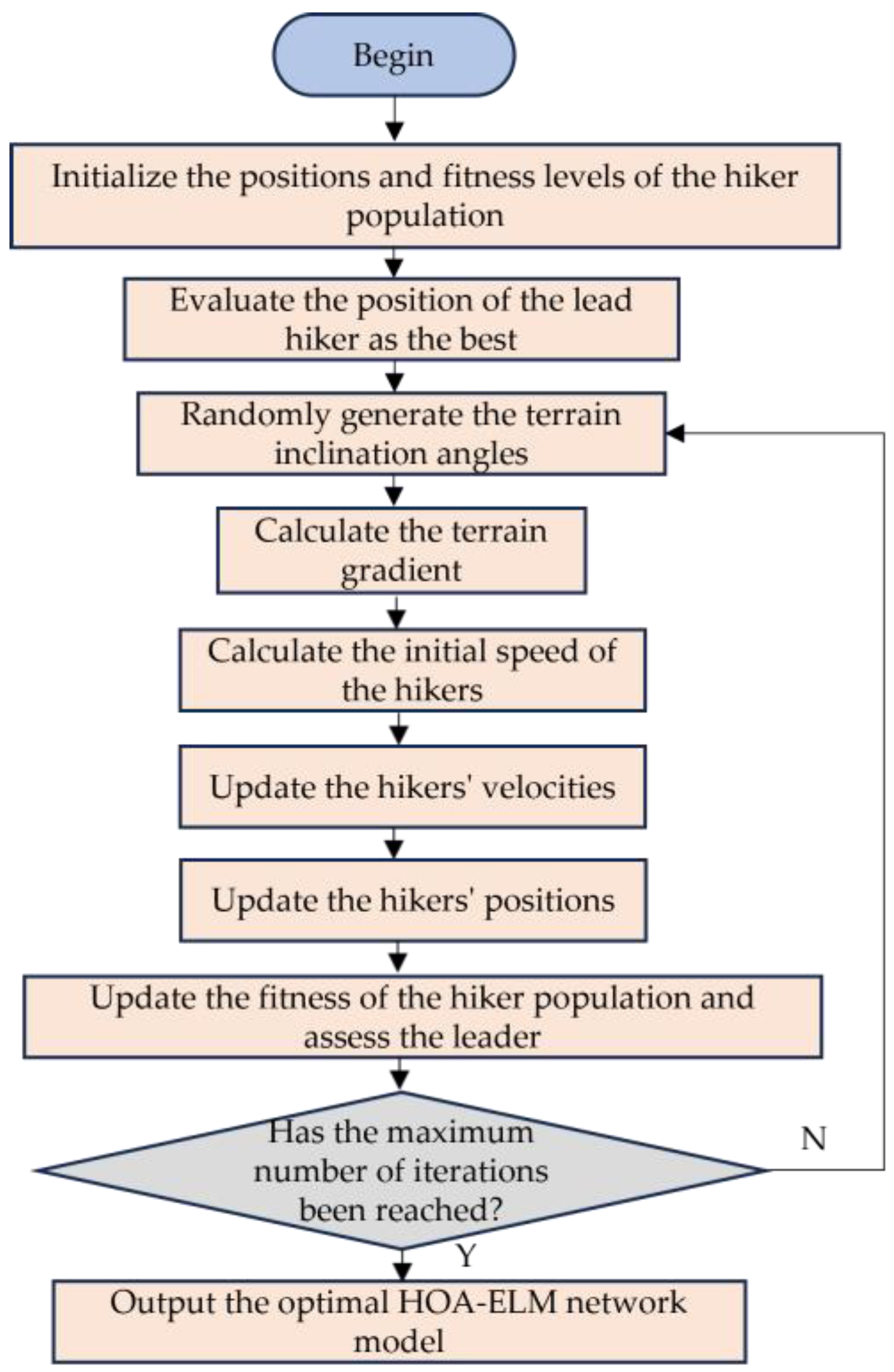
- (1)
- Initialize all the initial parameters of the HOA, including the maximum number of iterations, the upper bound of the population U, and the lower bound L;
- (2)
- Randomly initialize the population, where each individual in the population is composed of a vector of the hidden layer weights and biases of the ELM, and randomly divide the population into two sub-populations;
- (3)
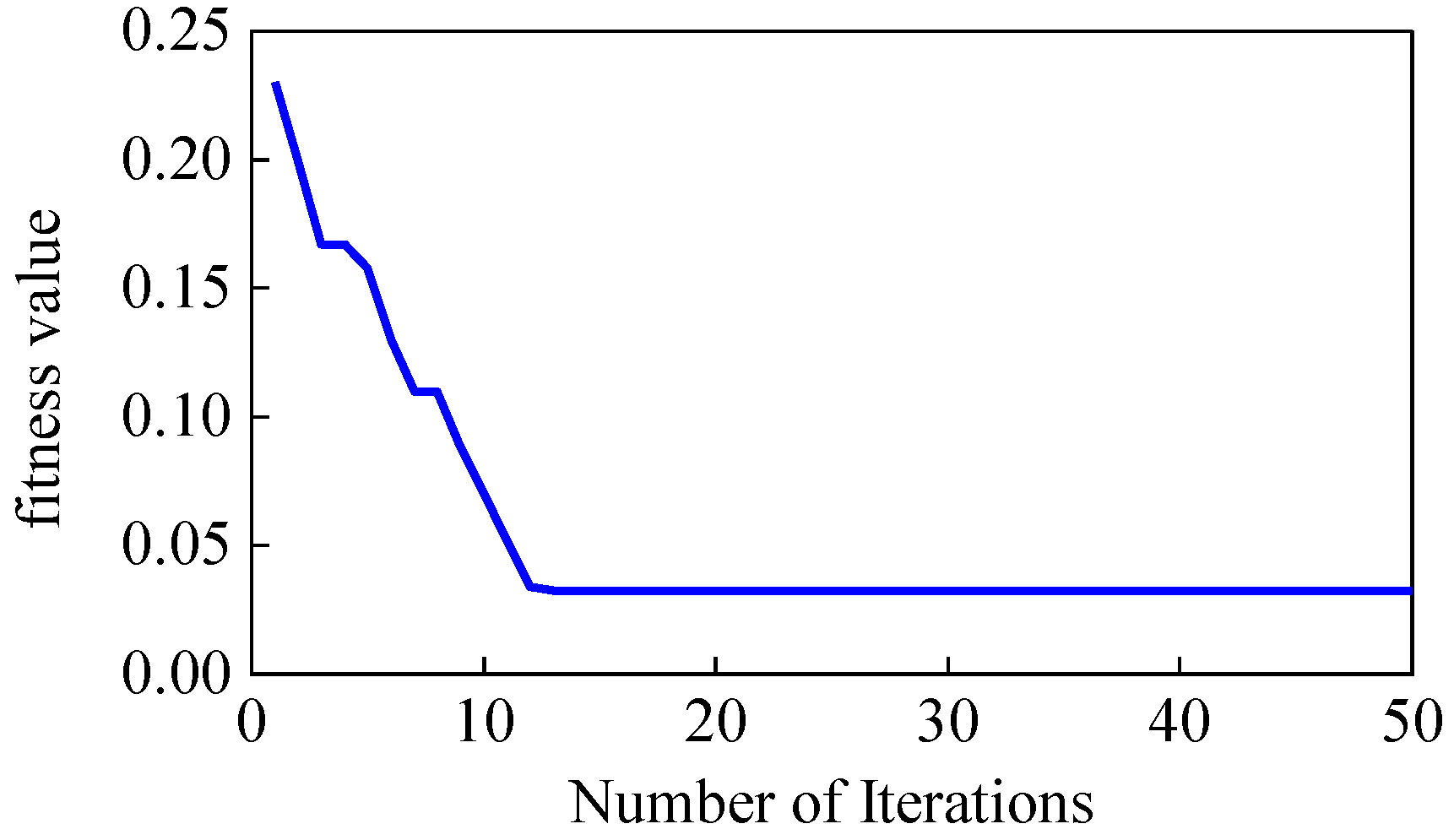
- Calculate the fitness value of each individual in the current population according to the fitness function, where the fitness function is Equation (27), and the fitness value is the classification error rate of the training data, recording the individual with the minimum fitness value;
- (4)
- Update the velocity and position of individuals in the population according to Equations (23) and (24), respectively;
- (5)
- Repeat steps (3) and (4) until the maximum number of iterations is reached. By following these steps, the optimization of the ELM is achieved. This algorithm is referred to as HOA-ELM in this paper, and its flowchart is presented in Figure 4.
3. Hydropower Unit Fault Diagnosis Model Based on DMD and HOA-ELM
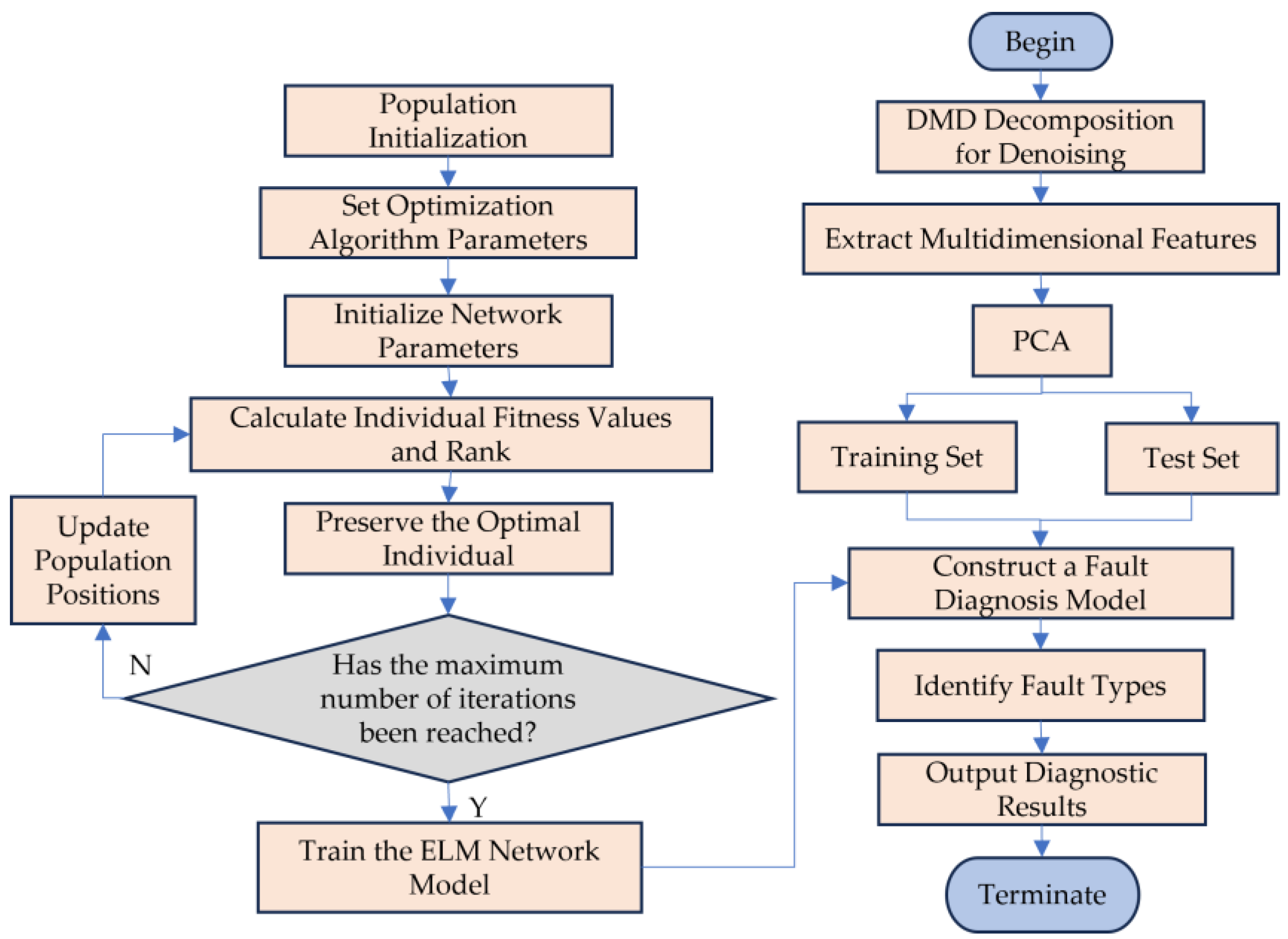
- (1)
- Perform an adaptive decomposition using DMD on the original signal to obtain a set of IMF arranged in order of frequency, reflecting the features of the signal across different time scales;
- (2)
- Extract the time-domain and frequency-domain features of the denoised signal, as well as the energy entropy, root mean square, and singular value features of each modal component. Perform PCA on the extracted feature vectors to obtain the reduced-dimensionality feature vectors;
- (3)
- Utilize the HOA to optimize the hidden layer weights w and biases b of the ELM, and employ the ELM with the optimal parameter configuration obtained as the final classifier for this diagnostic method;
- (4)
- Input the multi-domain integrated features from step (2) into the optimized ELM from step (3) for fault diagnosis.
4. Case Study Analysis
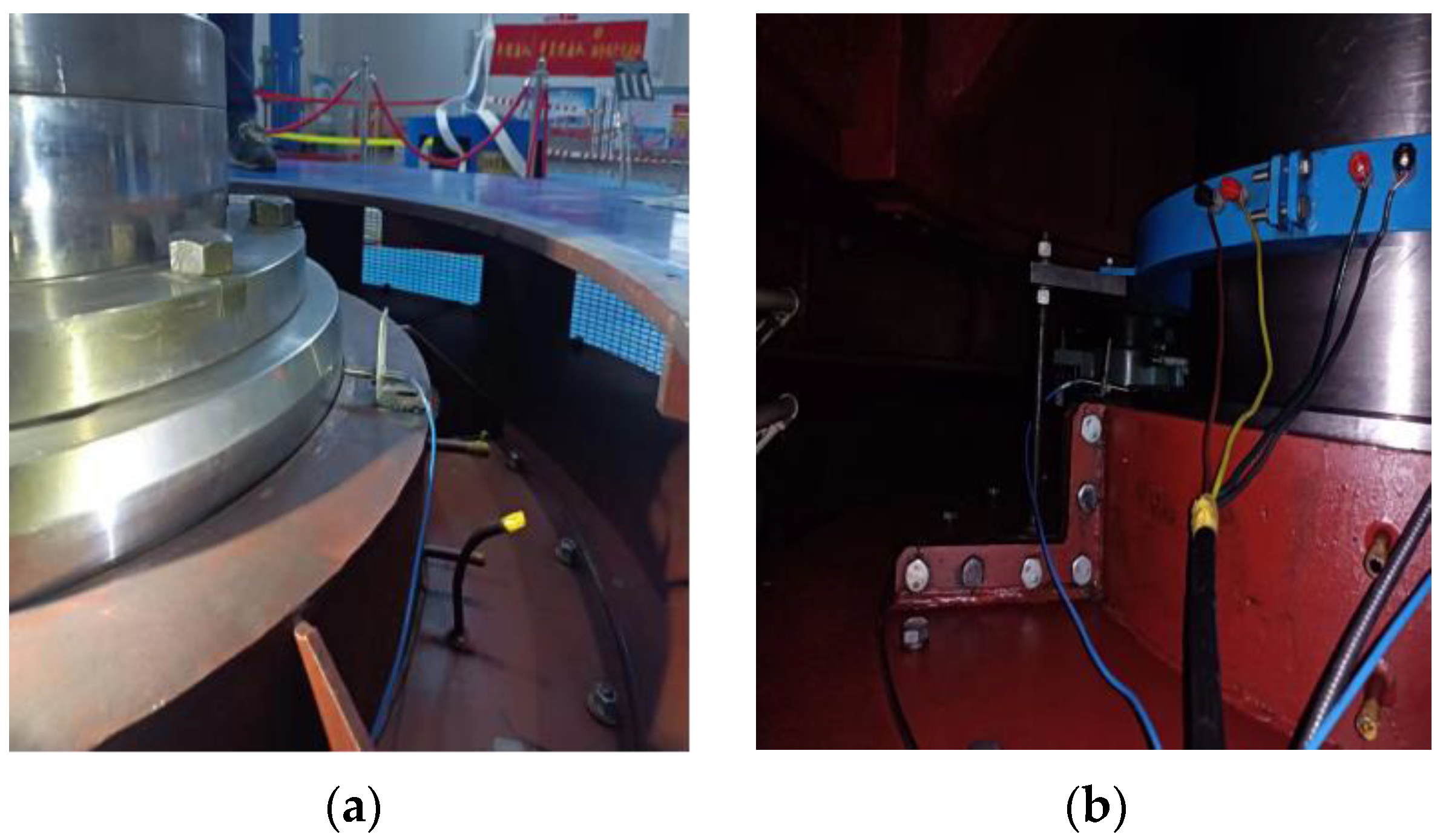
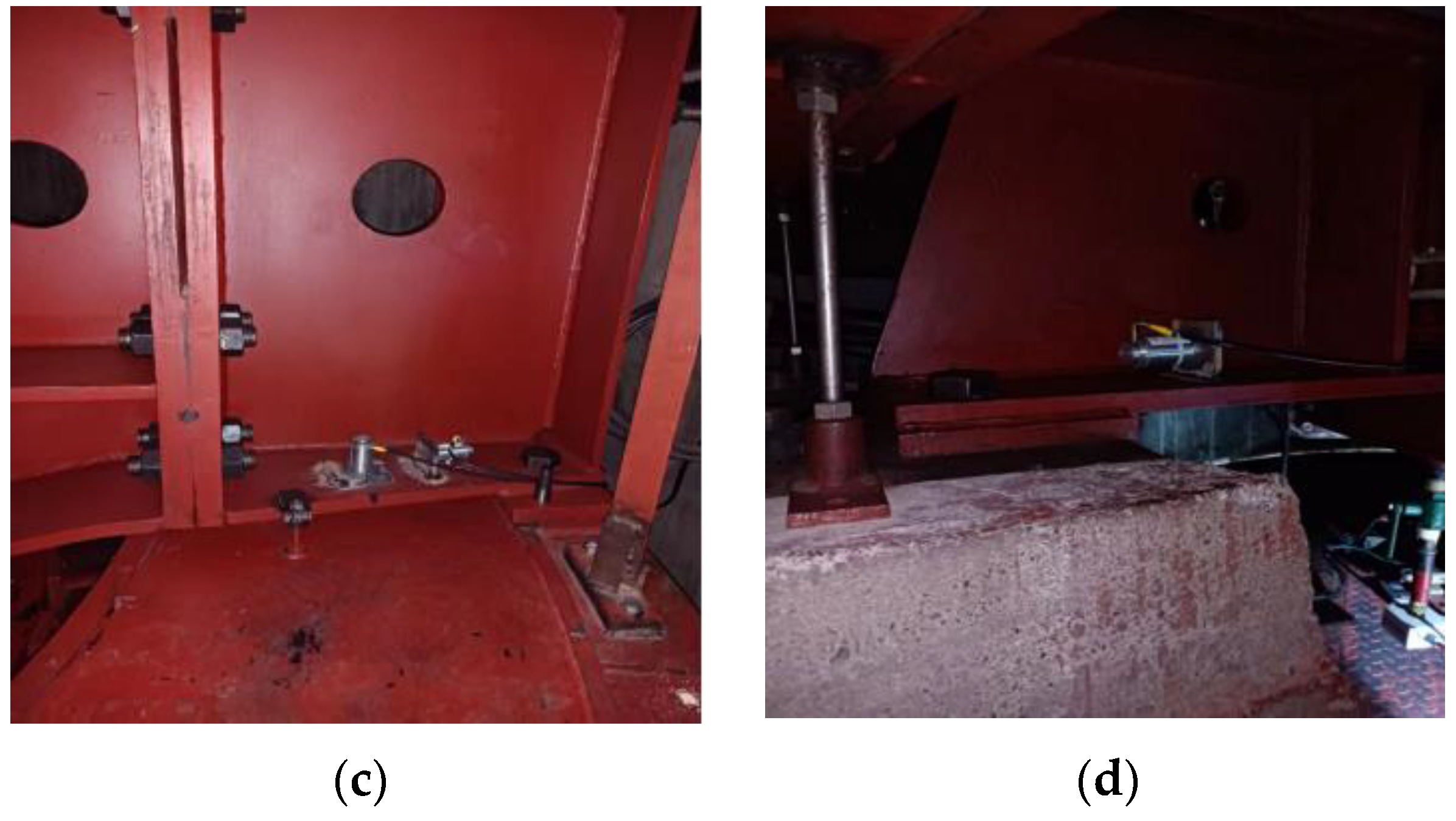
4.1. Data Acquisition
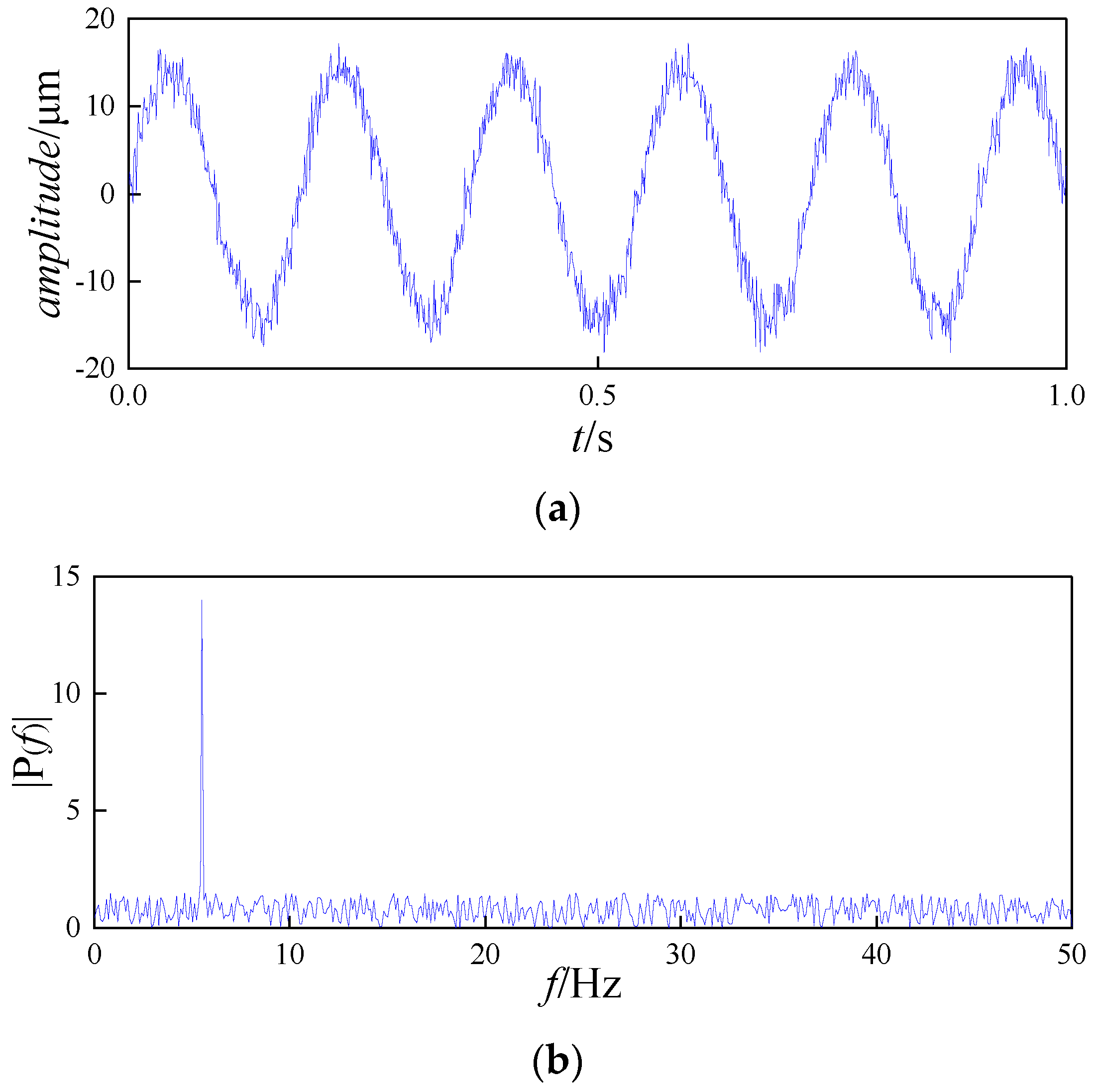
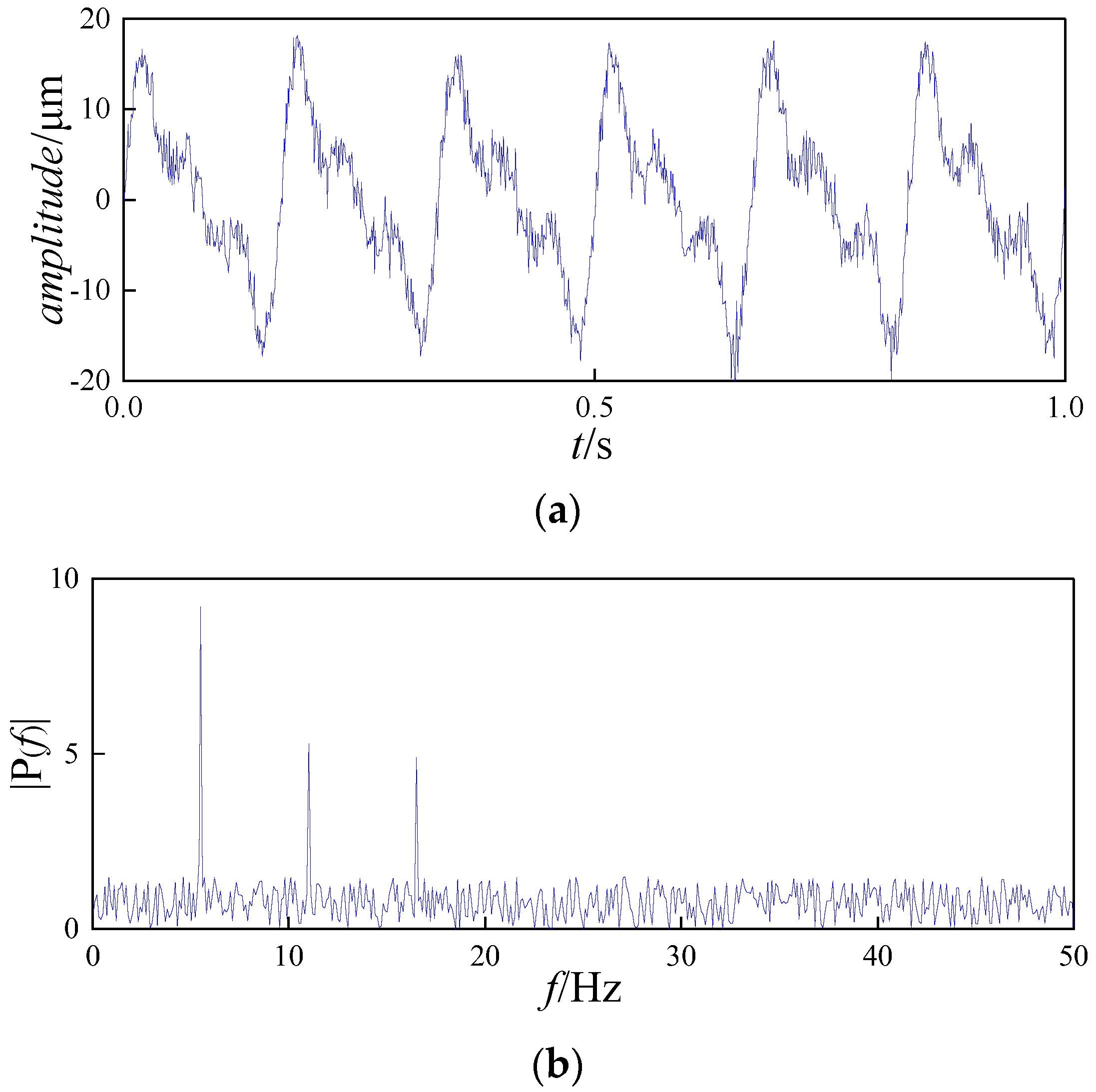
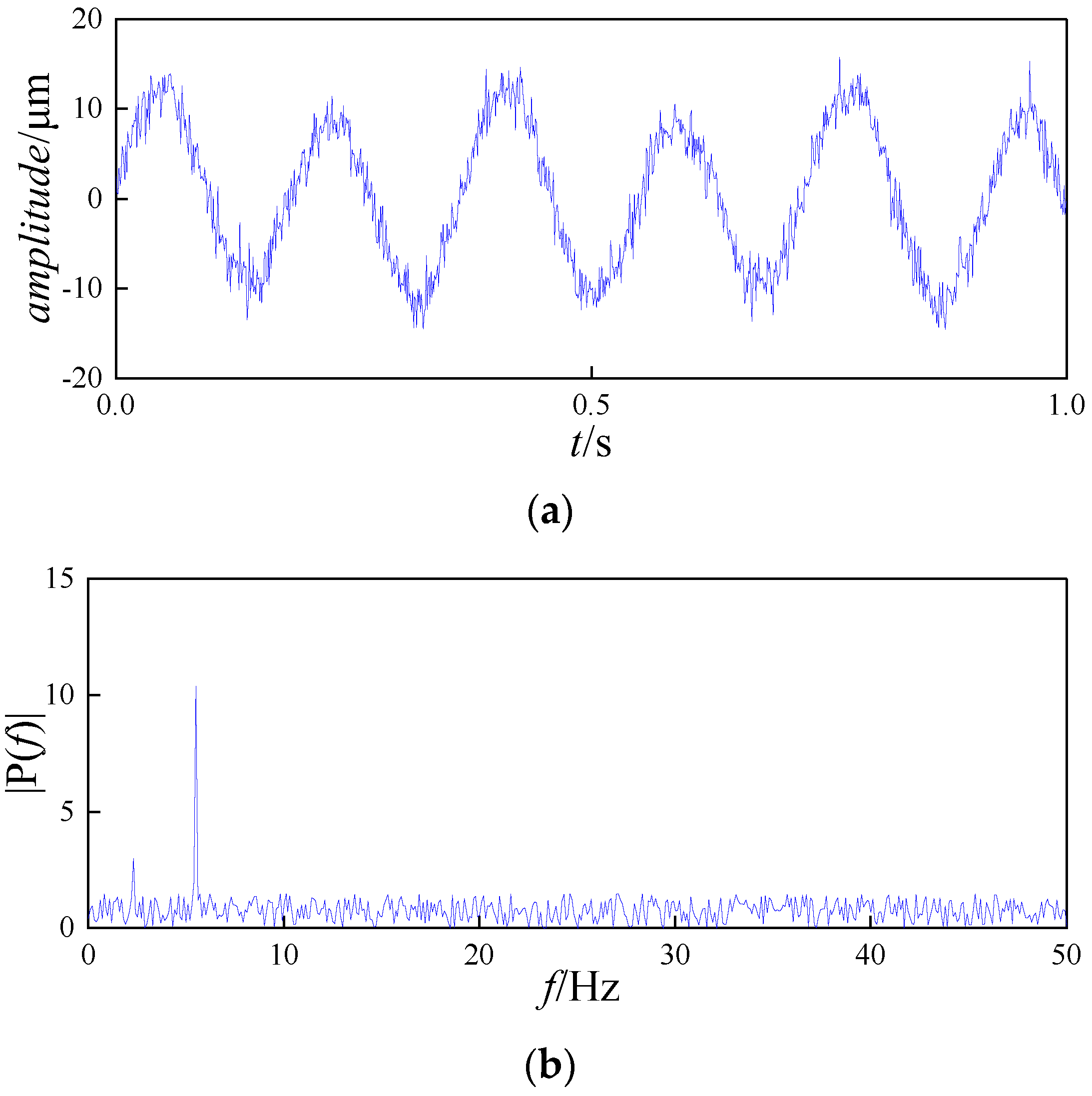
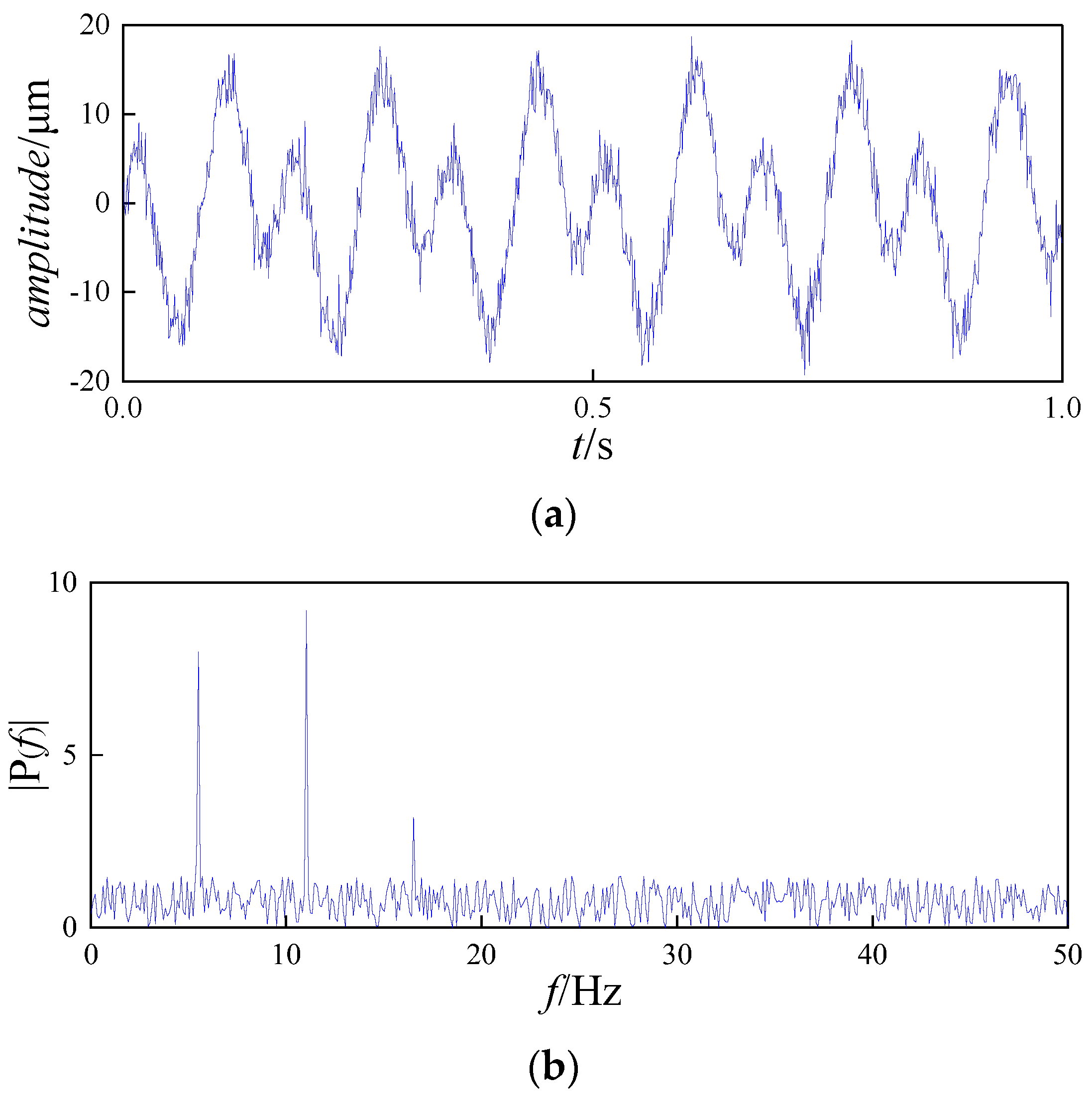
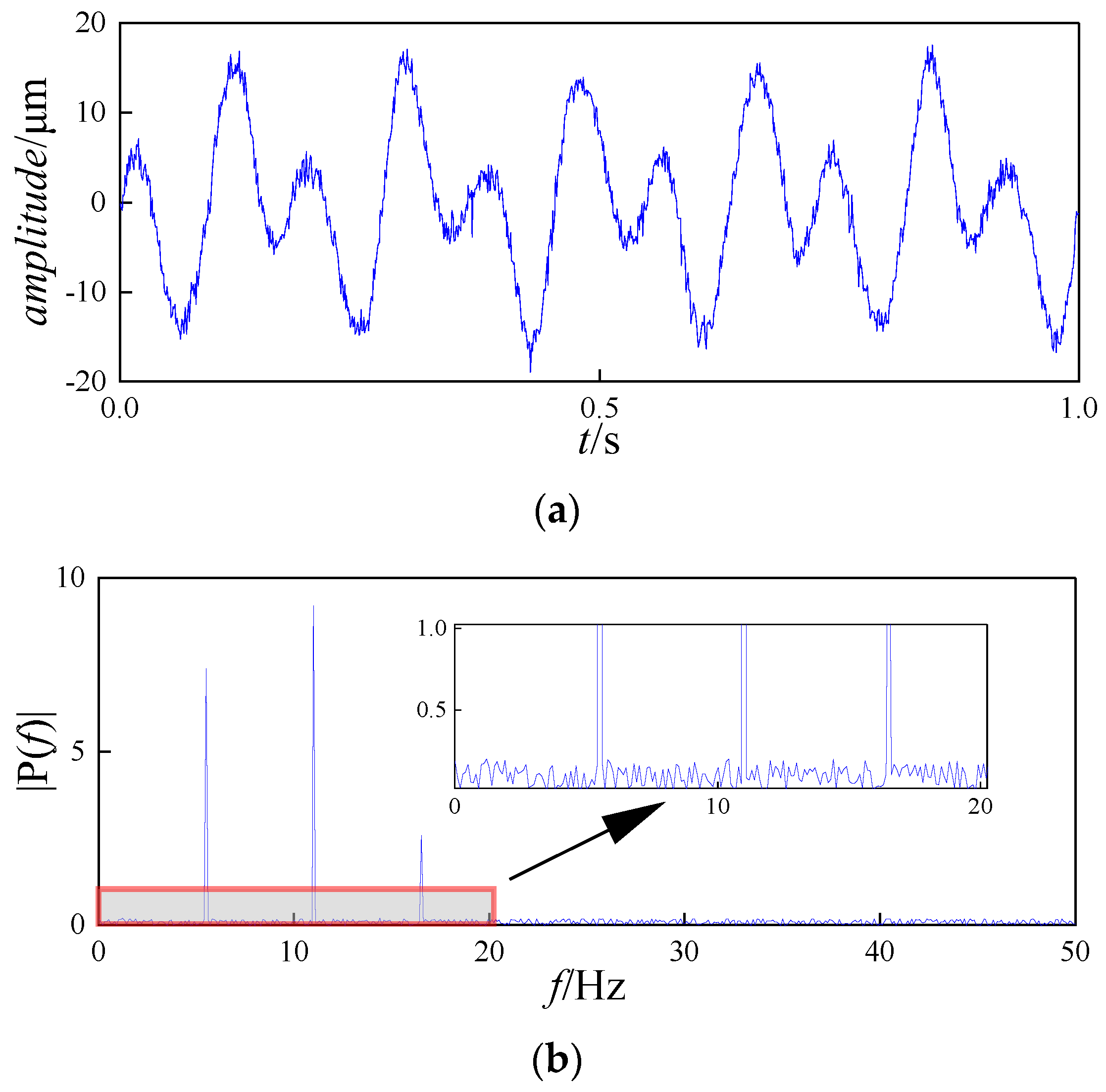
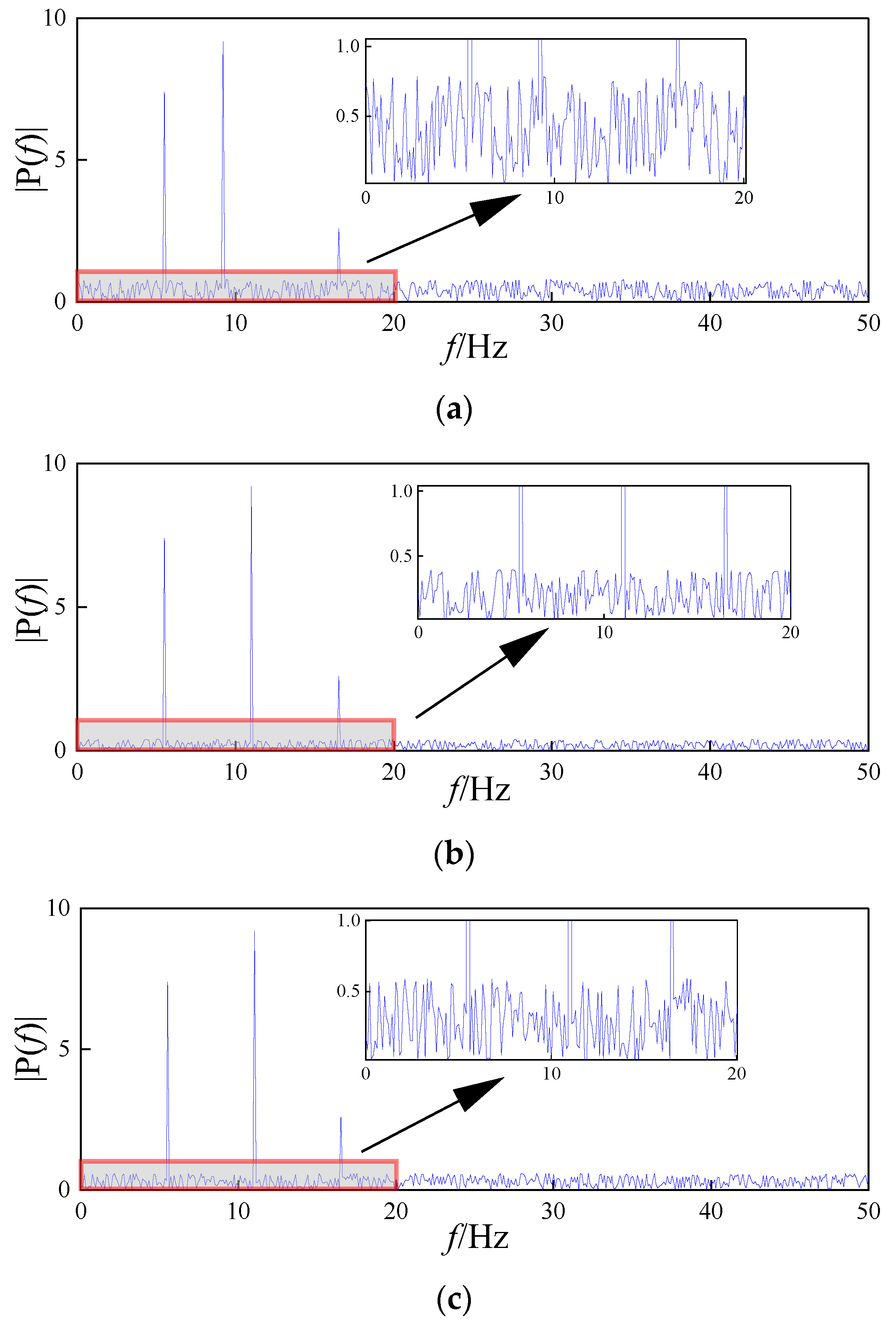
4.2. DMD Decomposition for Noise Reduction
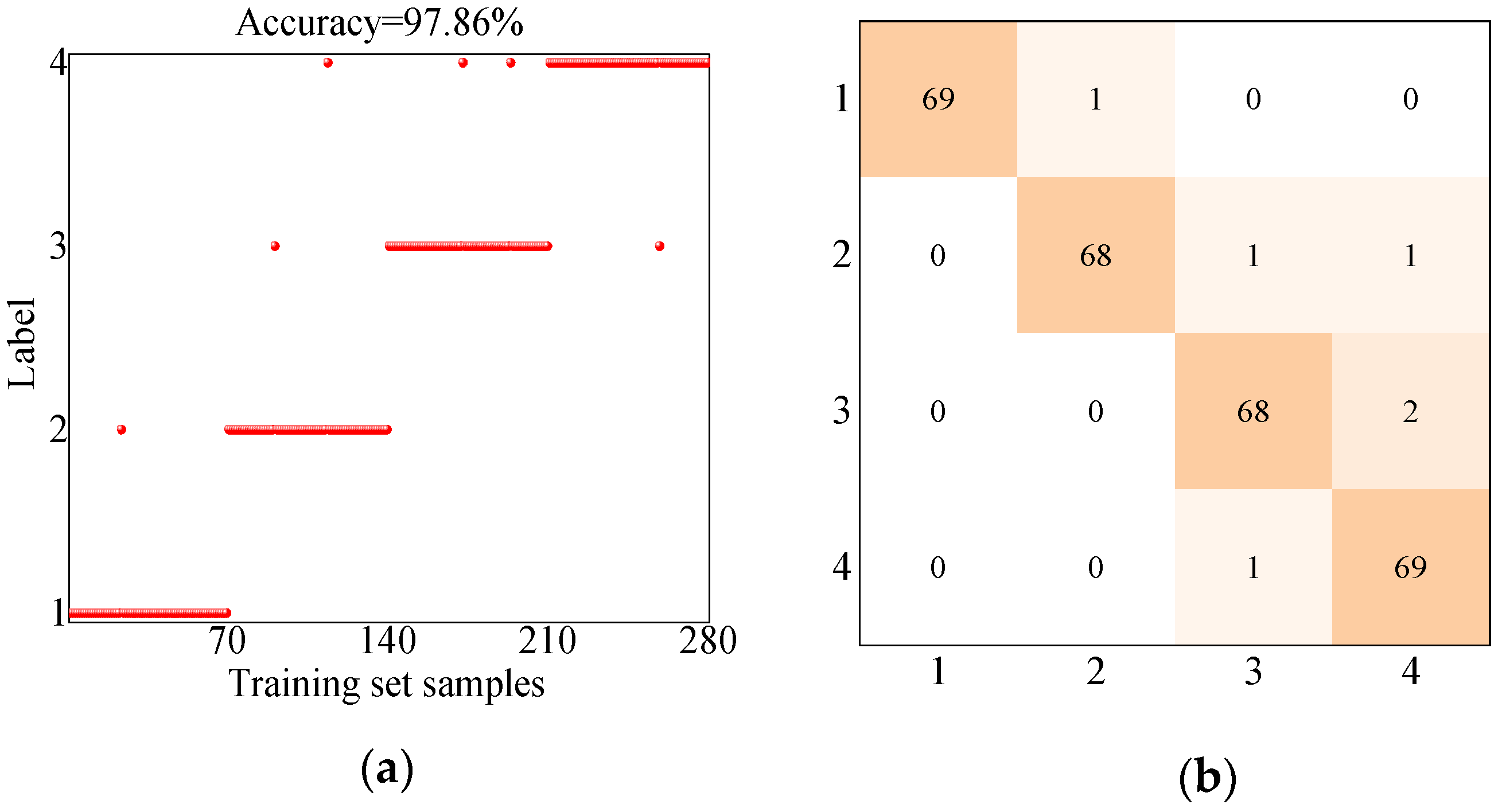
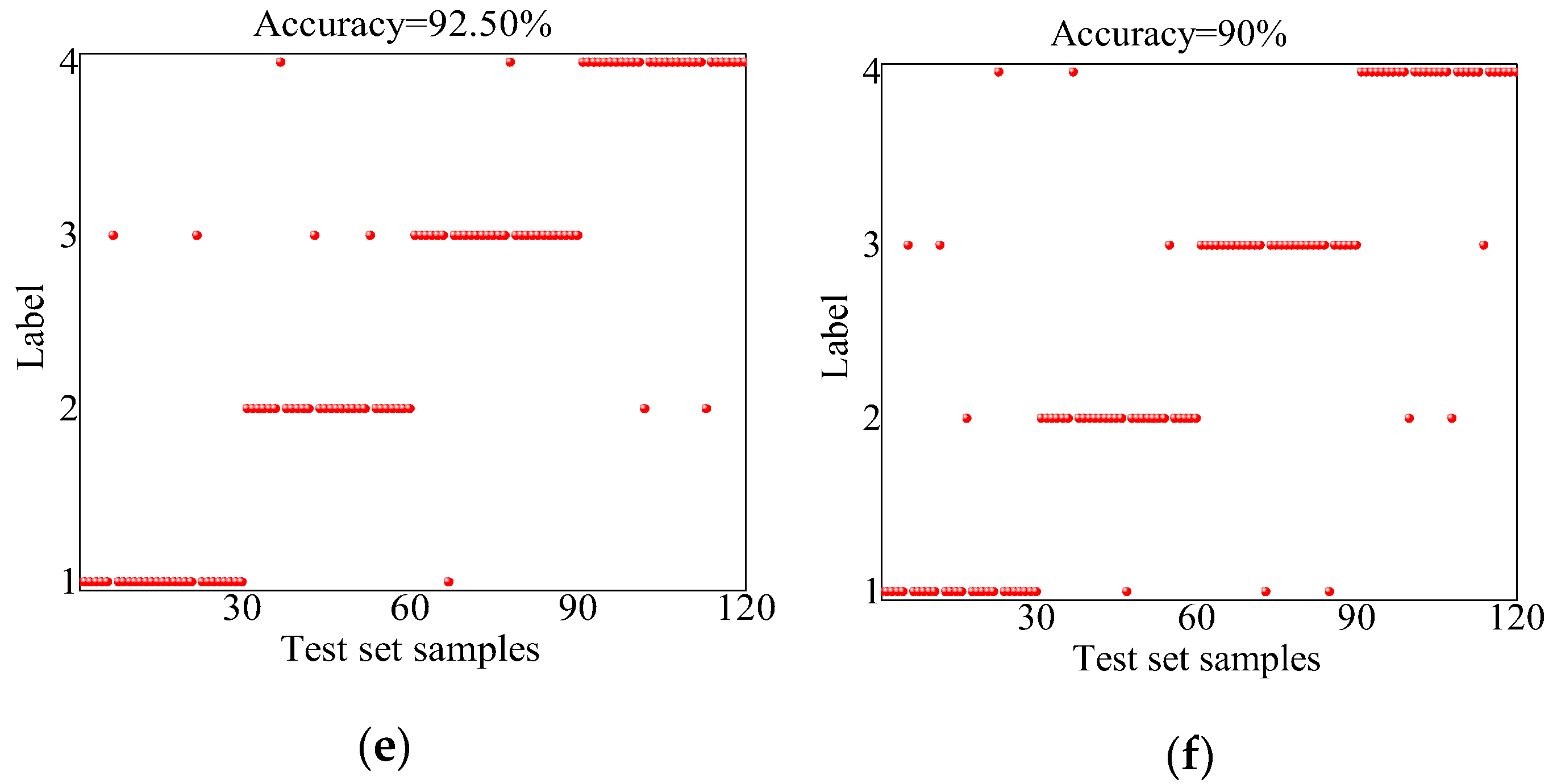
4.3. HOA-ELM Diagnostic Model
5. Conclusions
- (1)
- To address the problem of noise interference in the vibration signals of hydropower units, this paper utilizes DMD and reconstructs the signal using a thresholding technique to mitigate noise. A comparative analysis with alternative noise reduction methods demonstrates that the signal processed with the proposed noise reduction technique exhibits higher energy levels and smoother characteristics, indicating more effective noise reduction.
- (2)
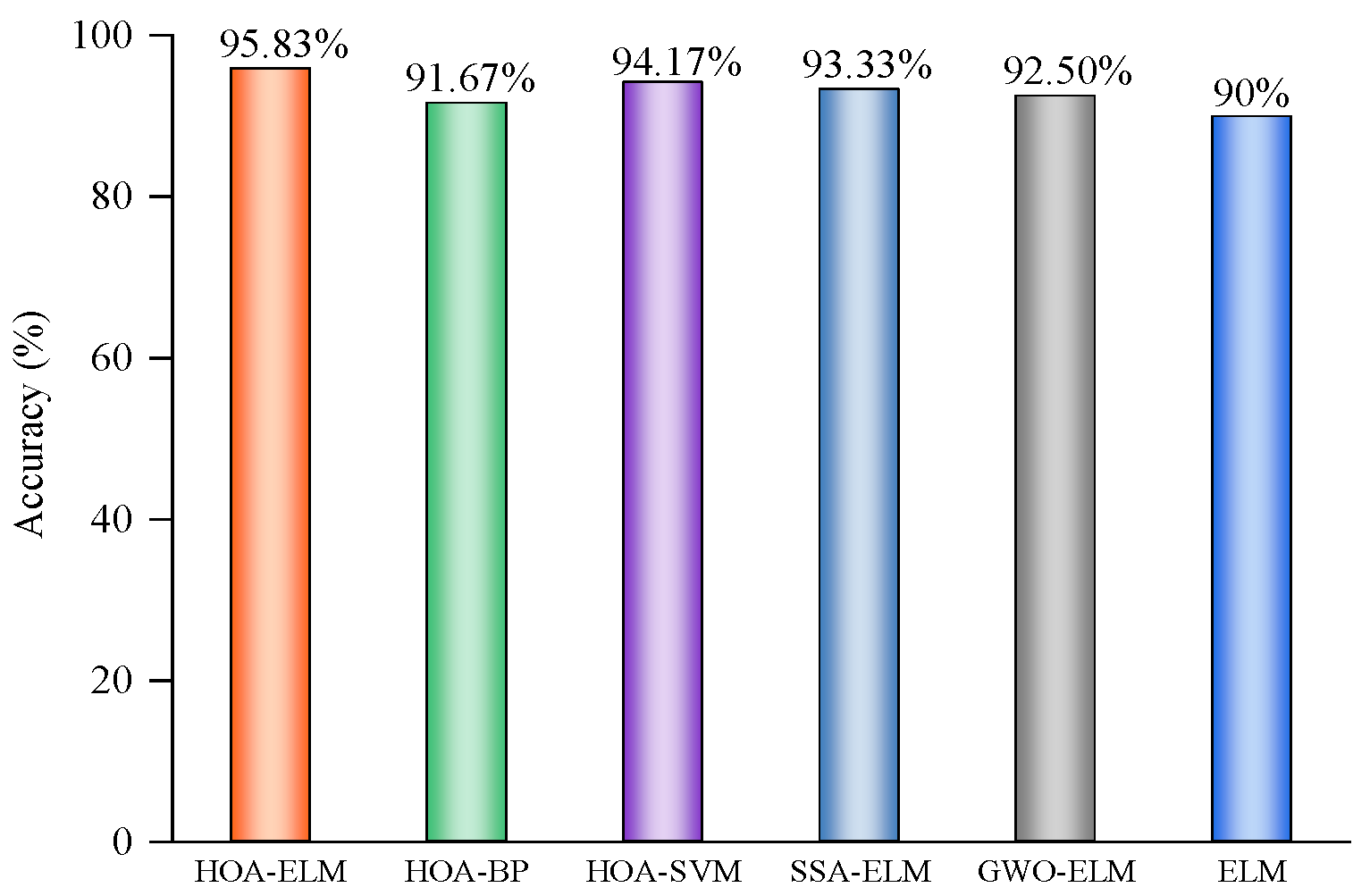
- To address the randomness of the weights and biases in the ELM, an HOA with improved convergence performance is introduced to optimize these two parameters. Experimental comparisons demonstrate that the HOA significantly enhances the model’s classification accuracy to 95.83%, representing a 6.48% increase over the traditional ELM model.
- (3)
- A comparison of unit status recognition among six models, including HOA-ELM, demonstrates that the proposed model achieves the highest diagnostic accuracy. This confirms that the HOA-ELM model is an effective hydropower unit fault diagnosis tool with excellent diagnostic precision.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- You, P.; Ji, H.; Tang, W. Vibration analysis of giant hydro-generator sets. Hydropower New Energy 2021, 35, 35–38. [Google Scholar]
- Liu, Y.; Liu, W.; Shi, Y. GMM-DBSCAN multi-scale cleaning of vibration signals from hydropower units in complex operating conditions. J. Hydroelectr. Eng. 2022, 41, 153–162. [Google Scholar]
- Hu, X.; Xiao, Z.; Liu, D. Vibration fault identification method of hydropower unit based on EEMD-SDCC-HMM. J. Vib. Shock 2022, 41, 165–175+230. [Google Scholar]
- Jia, J.; Wu, M.; Song, K. Traction network overvoltage identification based on short time Fourier transform and deep learning. Electr. Eng. 2021, 22, 1–10. [Google Scholar]
- Ji, L.; Jing, X.; Zhou, D. Fault diagnosis of hydropower unit based on VMD-WT-CNN and attention mechanism. Sci. Hydropower Energy 2024, 42, 184–187+157. [Google Scholar]
- Wu, K.; Zhou, J.; Pan, W. Research on prediction method of measured swing signal for hydro turbine unit based on EMD-LSTM model. Sci. Hydropower Energy 2024, 42, 179–182. [Google Scholar]
- Wang, M.; Weng, S.; Yu, X. Structural damage identification based on time-varying modal mode shape of wavelet transformation. J. Vib. Shock 2021, 40, 10–19. [Google Scholar]
- Wang, X.; Niu, S.; Zhang, K. Image fusion of infrared weak-small target based on wavelet transform and feature extraction. J. Northwestern Polytech. Univ. 2020, 38, 723–732. [Google Scholar] [CrossRef]
- Zhou, X.; Tong, X. Ultra-short-term wind power combined prediction based on CEEMD-SBO-LSSVR. Power Syst. Technol. 2021, 45, 855–864. [Google Scholar]
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Chen, C.; Zou, Z.; Zou, L. Time series prediction of ship maneuvering motion in waves based on high-order dynamic mode decomposition. China Shipbuild. 2023, 64, 216–224. [Google Scholar]
- Li, J.; Hu, X.; Geng, J. Fault diagnosis method for variable working condition bearings based on DMD and improved capsule network. J. Electr. Mach. Control 2023, 27, 48–57. [Google Scholar]
- Yang, T.; Wang, W.; Zhang, P. Fault diagnosis method for hydropower unit based on CEEMDAN and hybrid grey wolf optimization algorithm optimized SVM. Sci. Hydropower Energy 2022, 40, 195–198. [Google Scholar]
- Hu, X.; Xiao, Z.; Liu, D. Hydropower unit fault diagnosis based on VMD-CNN. J. Hydroelectr. Eng. 2020, 38, 137–141. [Google Scholar]
- He, K.; Chen, J.; Jin, Y. Application of EEMD multiscale entropy and ELM in feature extraction of vibration signal of hydropower unit. China Rural Water Hydropower 2021, 176–182+187. [Google Scholar] [CrossRef]
- Liu, W.; Zheng, Y.; Ma, Z. An intelligent fault diagnosis scheme for hydropower units based on the pattern recognition of axis orbits. Measure. Sci. Technol. 2023, 34, 025104. [Google Scholar] [CrossRef]
- Li, X.; Xu, Z.; Wang, Y. PSO-MCKD-MFFResnet based fault diagnosis algorithm for hydropower units. Math. Biosci. Eng. 2023, 20, 14117–14135. [Google Scholar] [CrossRef]
- Chen, Q.; Wei, H.; Rashid, M. Kernel extreme learning machine based hierarchical machine learning for multi-type and concurrent fault diagnosis. Measurement 2021, 184, 109923. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Q.; Qin, X. A two-stage fault diagnosis methodology for rotating machinery combining optimized support vector data description and optimized support vector machine. Measurement 2022, 200, 111651. [Google Scholar] [CrossRef]
- Zheng, J.; Wei, G. Time-frequency and energy analysis of electromagnetic signals based on multi-resolution dynamic mode decomposition. Syst. Eng. Electron. Technol. 2022, 44, 1468–1474. [Google Scholar]
- Ye, H.; Zhong, H.; Ou, Y. A denoising method for tunnel blasting vibration signals based on VMD and energy entropy. Met. Mines 2022, 1–17, submitted for publication. [Google Scholar]
- Huo, H.; Chen, G.; Wang, W. Benchmark solution for the random vibration response of moderately thick cylindrical shells under steady/non-steady excitation. Acta Mech. Sin. 2022, 54, 762–776. [Google Scholar]
- Zi, Y.; Zhou, J. Fault diagnosis of rolling bearings based on S-transform and singular value median decomposition. J. Mech. Electr. Eng. 2022, 39, 949–954. [Google Scholar]
- Zhang, Y.; Tian, L. Comprehensive evaluation of thermal power unit operation based on PCA and improved TOPSIS method. J. North China Electr. Power Univ. Nat. Sci. Ed. 2023, 50, 110–116+126. [Google Scholar]
- Zhu, X.; Yuan, Z.; Li, H. A deformation prediction method for concrete dams based on BP-PCA-WCA-SVM. Yangtze River Sci. Acad. 2024, 41, 138–145. [Google Scholar]
- Oladejo, S.O.; Ekwe, S.O.; Mirjalili, S. The Hiking Optimization Algorithm: A novel human-based metaheuristic approach. Knowl. Based Syst. 2024, 296, 111880. [Google Scholar] [CrossRef]
- Zhang, N.; Zhu, Y.; Sun, N. Vibration trend prediction of hydropower unit based on OVMD-TVFEMD secondary decomposition and HPO-ELM. Sci. Hydropower Energy 2023, 41, 204–207+199. [Google Scholar]
- Yao, F.; Yang, X.; Ding, F. Fault diagnosis of rolling bearing based on wavelet threshold noise reduction EMD-AR spectrum analysis and extreme learning machine. Manuf. Technol. Mach. Tool 2023, 7, 16–20+31. [Google Scholar]
- Xiao, B.; Zeng, Y.; Dao, F. Fault sound pattern recognition model for hydropower unit rubbing fault based on EEMD-CNN. J. Hydroelectr. Eng. 2024, 43, 59–69. [Google Scholar]
- Zhang, H.; Zhu, Y.; Lv, M. Bearing fault identification based on MCKD denoising and improved EWT signal decomposition. Mech. Des. Res. 2023, 39, 80–83+91. [Google Scholar]
- Wang, W.; Hou, K.; He, K. Fault diagnosis of hydropower unit based on GSA optimized VMD-DBN. J. Wuhan Univ. Eng. Ed. 2023, 56, 244–250. [Google Scholar]
- Xu, Z.; Liu, T.; Ren, S. Fault diagnosis of hydropower unit based on time-delayed multi-scale fluctuation dissipation entropy and improved kernel extreme learning machine. Eng. Sci. Technol. 2024, 56, 41–51. [Google Scholar]
- Zhang, F.; Yuan, F.; He, Y. Denoising of hydropower unit vibration signals based on NLM-CEEMDAN and sample entropy. China Rural Water Hydropower 2023, 6, 286–294. [Google Scholar]
- Chen, F.; Wang, B.; Zhou, D. Fault diagnosis method for shaft fault of hydropower unit by integrating improved symbolic dynamic entropy and random configuration network. J. Hydraul. Eng. 2022, 53, 1127–1139. [Google Scholar]
- Li, Z.; Lin, H.; Xu, X. Fault detection method for turbine unit based on KPCA-PSO-SVM. J. Drain. Irrig. Mach. Eng. 2023, 41, 467–474. [Google Scholar]
- Li, X.; Qian, J.; Zeng, Y. Fault diagnosis of hydropower unit based on UPEMD fusion RCMCSE and ALWOA-BP. J. Hydraul. Eng. 2024, 55, 744–755. [Google Scholar]
- Xu, J.; Yang, P.; Yin, X. Gear fault diagnosis based on EMD decomposition and Levy-SSA-BP neural network. Mech. Transm. 2024, 48, 152–157. [Google Scholar]
- Chen, Q.; Liao, H.; Sun, Y. Prediction of photovoltaic power generation based on GWO-GRU. Acta Sol. Energy 2024, 45, 438–444. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Rated Capacity | 35 | MW |
| Rated Head | 181 | m |
| Rated Flow | 25.25 | m3/s |
| Rated Speed | 333.3 | r/min |
| Operating Condition | Label | Training Set | Test Set |
|---|---|---|---|
| Normal Condition | 1 | 70 | 30 |
| Stator–Rotor Rub | 2 | 70 | 30 |
| Thrust Head Looseness | 3 | 70 | 30 |
| Rotor Misalignment | 4 | 70 | 30 |
| Type | Component | Value |
|---|---|---|
| Correlation coefficient | IMF1 | 0.627 |
| IMF2 | 0.56 | |
| IMF3 | 0.459 | |
| IMF4 | 0.203 | |
| IMF5 | 0.175 | |
| Threshold | 0.27 | |
| Denoising Algorithm | RVR | NM |
|---|---|---|
| DMD | 0.138 | 10.376 |
| EMD | 0.214 | 9.735 |
| EEMD | 0.157 | 10.043 |
| EWT | 0.179 | 9.872 |
| Evaluation Metric | Label | Mean Value | |||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | ||
| Precision | 100% | 98.55% | 97.14% | 95.83% | 97.88% |
| Recall | 98.57% | 97.14% | 97.14% | 98.57% | 97.86% |
| Accuracy | 97.86% | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, D.; Wang, Y.; Xin, H.; Li, X.; Xu, S.; Zhou, W.; Li, H. Fault Diagnosis Method for Hydropower Units Based on Dynamic Mode Decomposition and the Hiking Optimization Algorithm–Extreme Learning Machine. Energies 2024, 17, 5159. https://doi.org/10.3390/en17205159
Lin D, Wang Y, Xin H, Li X, Xu S, Zhou W, Li H. Fault Diagnosis Method for Hydropower Units Based on Dynamic Mode Decomposition and the Hiking Optimization Algorithm–Extreme Learning Machine. Energies. 2024; 17(20):5159. https://doi.org/10.3390/en17205159
Chicago/Turabian StyleLin, Dan, Yan Wang, Hua Xin, Xiaoyan Li, Shaofei Xu, Wei Zhou, and Hui Li. 2024. "Fault Diagnosis Method for Hydropower Units Based on Dynamic Mode Decomposition and the Hiking Optimization Algorithm–Extreme Learning Machine" Energies 17, no. 20: 5159. https://doi.org/10.3390/en17205159
APA StyleLin, D., Wang, Y., Xin, H., Li, X., Xu, S., Zhou, W., & Li, H. (2024). Fault Diagnosis Method for Hydropower Units Based on Dynamic Mode Decomposition and the Hiking Optimization Algorithm–Extreme Learning Machine. Energies, 17(20), 5159. https://doi.org/10.3390/en17205159