
Improvement of Power Production Efficiency Following the Application of the GD InC Maximum Power Point Tracking Method in Photovoltaic Systems


Abstract
1. Introduction
2. Analysis of Various MPPT Methods for PV Systems and Methods to Apply the GD InC Method
2.1. Analysis of the P&O Method
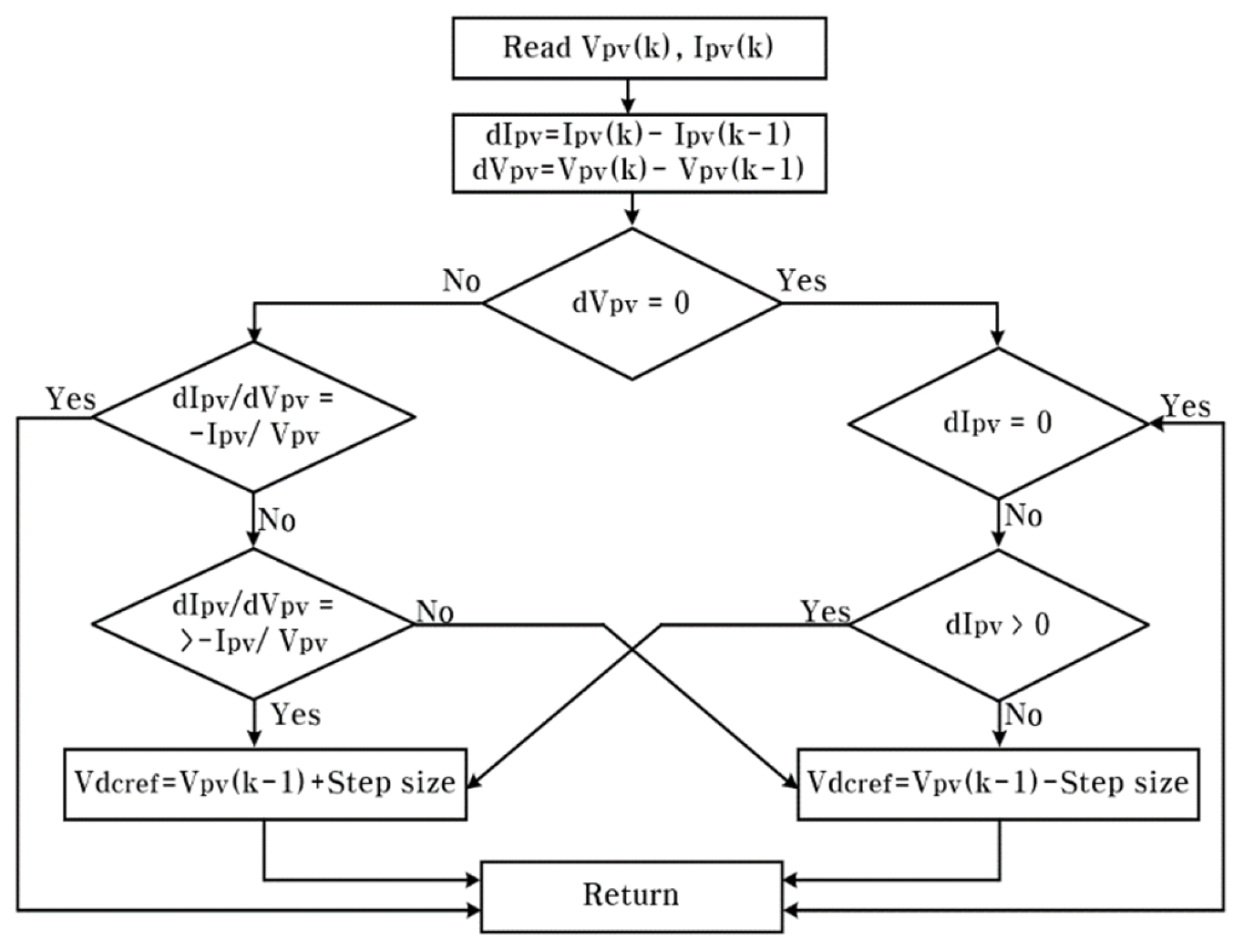
2.2. Analysis of the InC Method
2.3. Performance Comparison for Selecting Appropriate MPPT Methods
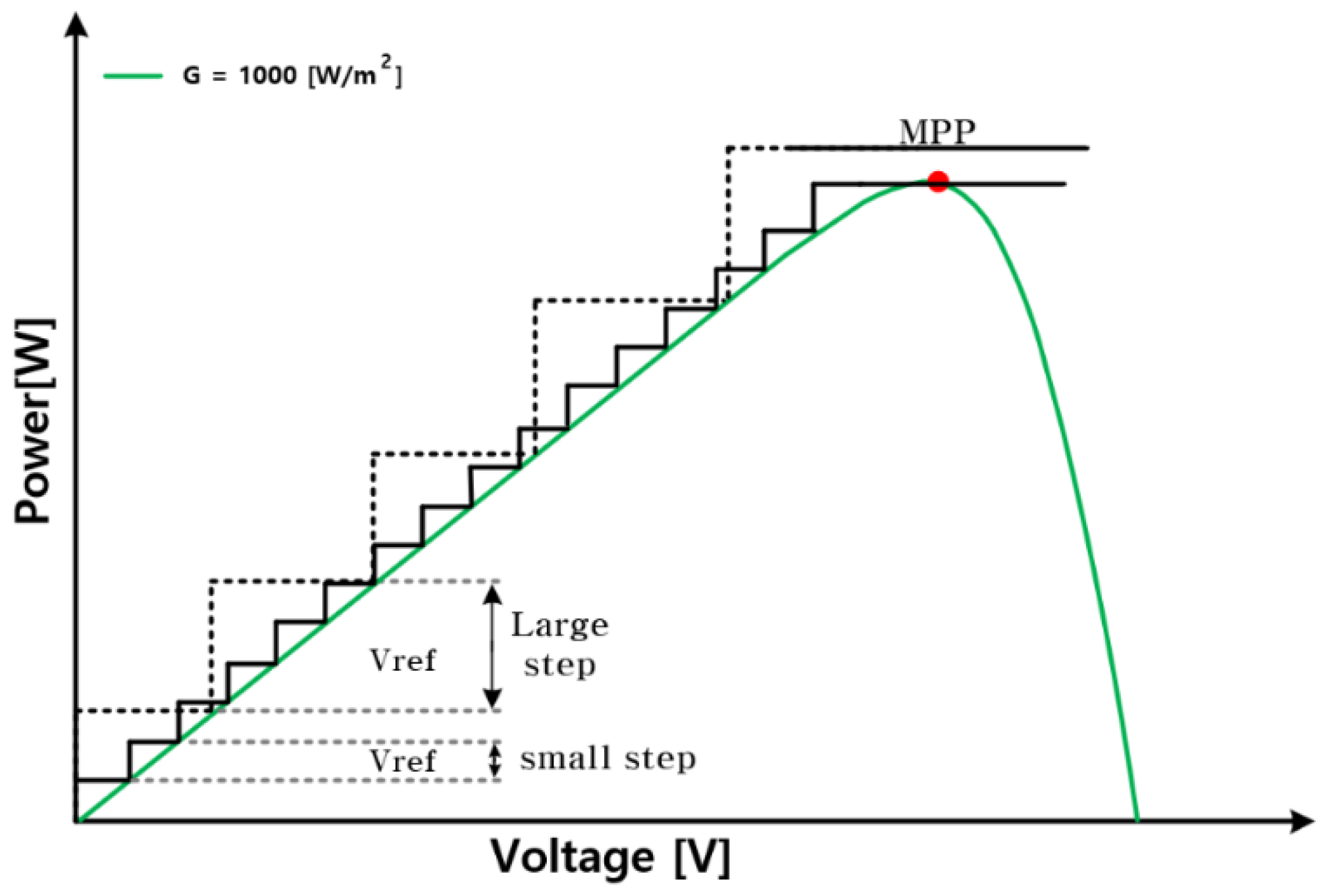
2.4. Derivation of Problems with the InC Method
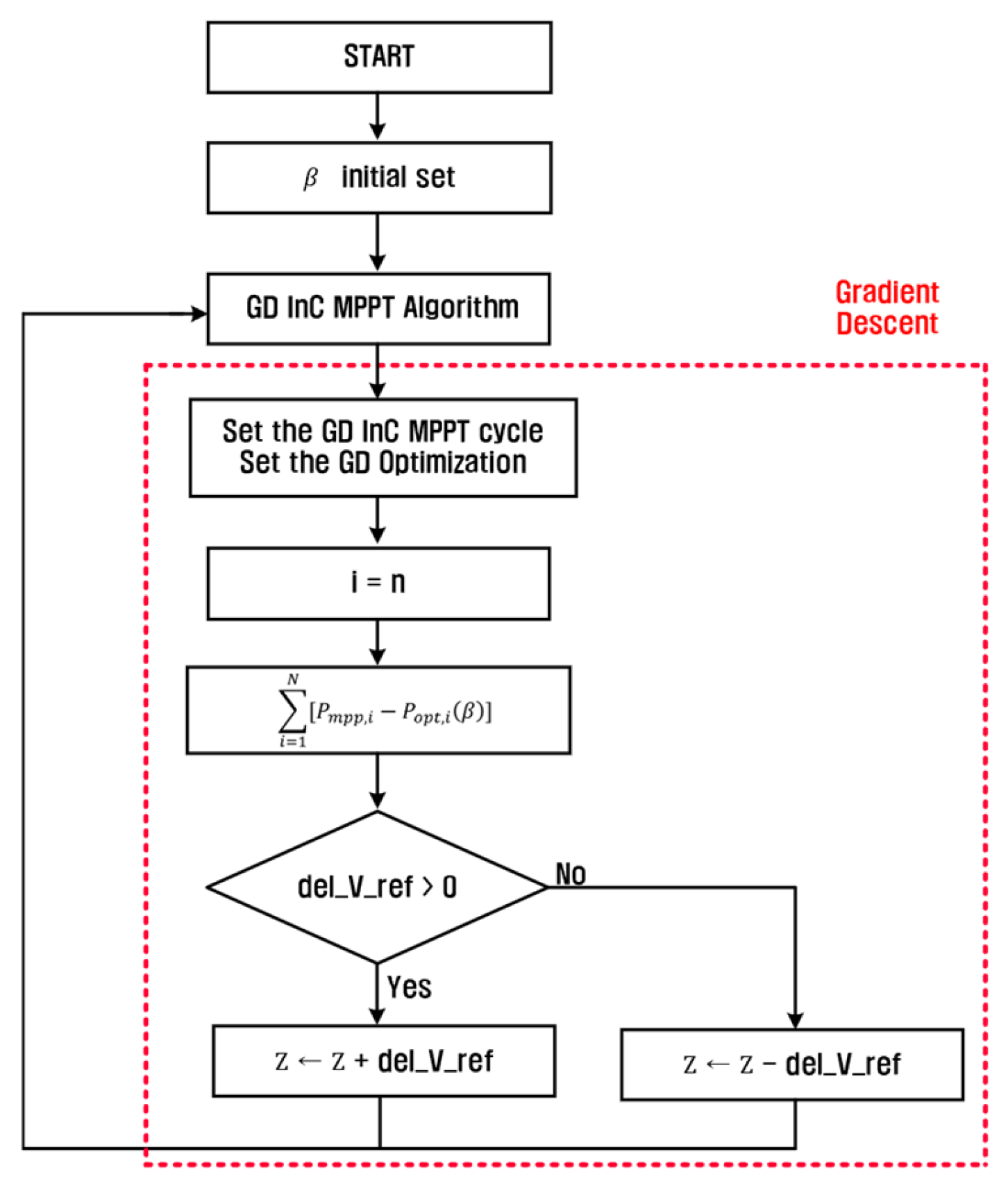
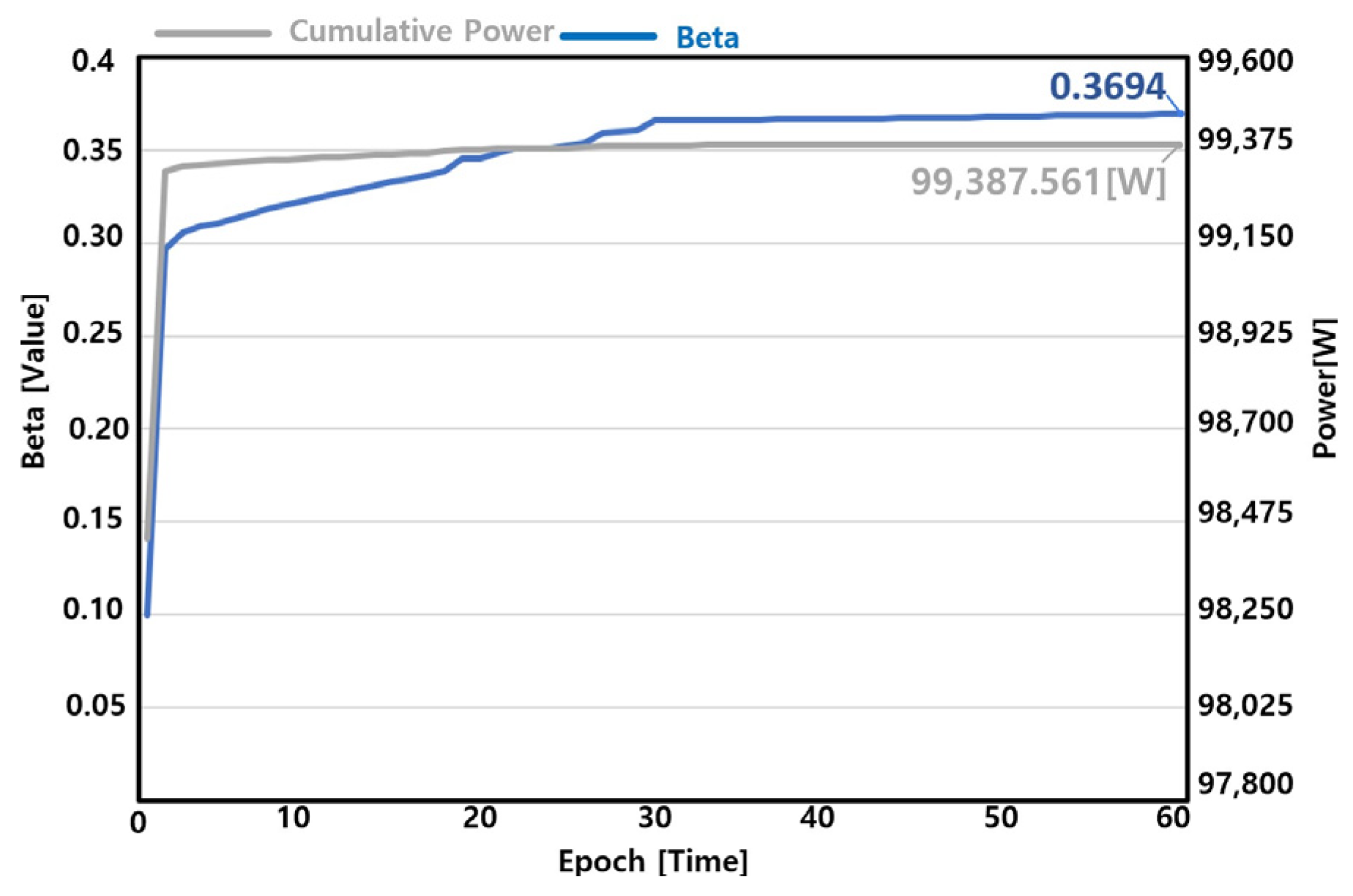
2.5. Operation of the Proposed GD InC Method and the Optimization Process
3. Simulations and Experiments to Verify the Effectiveness of the Proposed GD InC Method
3.1. Analysis of the Effectiveness of the GD InC Method Through Simulation
3.2. DSP-Based Hardware Design and Production
3.3. Analysis of the Effectiveness of the GD InC Method Through Experiment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sachs, J.; Crete, E. Zero Carbon Action Plan; Sustainable Development Solutions Network (SDSN): New York, NY, USA, 2020. [Google Scholar]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive Approach to Modeling and Simulation of Photovoltaic Arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Alsumiri, M. Residual Incremental Conductance Based Nonparametric MPPT Control for Solar Photovoltaic Energy Conversion System. IEEE Access 2019, 7, 87901–87906. [Google Scholar] [CrossRef]
- Le, P.T.; Tsai, H.L.; Lam, T.H. A Wireless Visualization Monitoring, Evaluation System for Commercial Photovoltaic Modules Solely in MATLAB/Simulink Environment. Sol. Energy 2016, 140, 1–11. [Google Scholar] [CrossRef]
- Ali, A.; Almutairi, K.; Padmanaban, S.; Tirth, V.; Algarni, S.; Irshad, K.; Islam, S.; Zahir, M.H.; Shafiullah, M.; Malik, M.Z. Investigation of MPPT Techniques Under Uniform and Non-uniform Solar Irradiation Condition—A Retrospection. IEEE Access 2020, 8, 127368–127392. [Google Scholar] [CrossRef]
- Kadri, R.; Gaubert, J.-P.; Champenois, G. An Improved Maximum Power Point Tracking for Photovoltaic Grid-Connected Inverter Based on Voltage-Oriented Control. IEEE Trans. Ind. Electron. 2011, 58, 66–75. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Delavari, H.; Zolfi, M. Maximum power point tracking in photovoltaic systems using indirect adaptive fuzzy robust controller. Soft Comput. 2021, 25, 10969–10985. [Google Scholar] [CrossRef]
- Sekkeli, A.G.M. Experimental evaluation of type-2 fuzzy logic controller adapted to real environmental conditions for maximum power point tracking of solar energy systems. Int. J. Circuit Theory Appl. 2022, 50, 4131–4145. [Google Scholar] [CrossRef]
- Nora, K.; Idir, A.; Grouni, S.; Boucherit, M.S. A New Combined Method for Tracking the Global Maximum Power Point of Photovoltaic Systems. Rev. Roum. Sci. Tech. Série Électrotechnique Énergétique 2022, 64, 2022. [Google Scholar]
- Kesilmiş, Z. A manhattan metric based perturb and observe maximum power point tracking algorithm for photovoltaic systems. Energy Sources Part A Recovery Util. Environ. Eff. 2022, 44, 469–492. [Google Scholar] [CrossRef]
- Sutikno, T.; Subrata, A.C.; Elkhateb, A. Evaluation of Fuzzy Membership Function Effects for Maximum Power Point Tracking Technique of Photovoltaic System. IEEE Access 2021, 9, 109157–109165. [Google Scholar] [CrossRef]
- Tightiz, L.; Mansouri, S.; Zishan, F.; Yoo, J.; Shafaghatian, N. Maximum Power Point Tracking for Photovoltaic Systems Operating under Partially Shaded Conditions Using SALP Swarm Algorithm. Energies 2022, 15, 8210. [Google Scholar] [CrossRef]
- Sedaghati, F.; Nahavandi, A.; Badamchizadeh, M.A.; Ghaemi, S.; Fallah, M.A. PV Maximum Power-Point Tracking by Using Artificial Neural Network. Math. Probl. Eng. 2012, 2012, 506709. [Google Scholar] [CrossRef]
- Mandourarakis, I.; Gogolou, V.; Koutroulis, E.; Siskos, S. Integrated Maximum Power Point Tracking System for Photovoltaic Energy Harvesting Applications. IEEE Trans. Power Electron. 2022, 37, 9865–9875. [Google Scholar] [CrossRef]
- Mumtaz, S.; Ahmad, S.; Khan, L.; Ali, S.; Khan, T.K.; Hassan, S. Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System. Energies 2018, 11, 606. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Framework of Maximum Power Extraction From Solar PV Panel Using Self Predictive Perturb and Observe Algorithm. IEEE Trans. Sustain. Energy 2018, 9, 895–903. [Google Scholar] [CrossRef]
- Jabbar, R.I.; Mekhilef, S.; Mubin, M.; Mohammed, K.K. A Modified Perturb and Observe MPPT for a Fast and Accurate Tracking of MPP Under Varying Weather Conditions. IEEE Access 2023, 11, 76166–76176. [Google Scholar] [CrossRef]
- Yanarates, C.; Wang, Y.; Zhou, Z. Unity Proportional Gain Resonant and Gain Scheduled Proportional (PR-P) Controller-Based Variable Perturbation Size Real-Time Adaptive Perturb and Observe (P&O) MPPT Algorithm for PV Systems. IEEE Access 2021, 9, 138468–138482. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New Sensorless Hybrid MPPT Algorithm Based on Fractional Short-Circuit Current Measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar] [CrossRef]
- Shang, L.; Guo, H.; Zhu, W. An Improved MPPT Control Strategy Based on Incremental Conductance Algorithm. Prot. Control Mod. Power Syst. 2020, 5, 1–8. [Google Scholar] [CrossRef]
- Gupta, A.K.; Pachauri, R.K.; Maity, T.; Chauhan, Y.K.; Mahela, O.P.; Khan, B.; Gupta, P.K. Effect of Various Incremental Conductance MPPT Methods on the Charging of Battery Load Feed by Solar Panel. IEEE Access 2021, 9, 90977–90988. [Google Scholar] [CrossRef]
- Huynh, D.C.; Dunnigan, M.W. Development and Comparison of an Improved Incremental Conductance Algorithm for Tracking the MPP of a Solar PV Panel. IEEE Trans. Sustain. Energy 2016, 7, 1421–1429. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Self-Adaptive Incremental Conductance Algorithm for Swift and Ripple-Free Maximum Power Harvesting From PV Array. IEEE Trans. Ind. Inform. 2018, 14, 2031–2041. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified Incremental Conductance Algorithm for Photovoltaic System Under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Electron. 2014, 61, 5384–5392. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Simulation and Hardware Implementation of Incremental Conductance MPPT With Direct Control Method Using Cuk Converter. IEEE Trans. Ind. Electron. 2011, 58, 1154–1161. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Assessment of the Incremental Conductance Maximum Power Point Tracking Algorithm. IEEE Trans. Sustain. Energy 2013, 4, 108–117. [Google Scholar] [CrossRef]
- Ibrahim, M.H.; Ang, S.P.; Dani, M.N.; Rahman, M.I.; Petra, R.; Sulthan, S.M. Optimizing Step-Size of Perturb & Observe and Incremental Conductance MPPT Methods Using PSO for Grid-Tied PV System. IEEE Access 2023, 11, 13079–13090. [Google Scholar] [CrossRef]
- Yang, Y.; Wen, H. Adaptive Perturb and Observe Maximum Power Point Tracking With Current Predictive and Decoupled Power Control for Grid-Connected Photovoltaic Inverters. J. Mod. Power Syst. Clean Energy 2019, 7, 422–432. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A Variable Step Size INC MPPT Method for PV Systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Kumar, P.D.S.; Samanta, S.; Mishra, S. Steady Output and Fast Tracking MPPT (SOFT-MPPT) for P&O and InC Algorithms. IEEE Trans. Sustain. Energy 2021, 12, 293–302. [Google Scholar] [CrossRef]
- Kim, E.; Warner, M.; Bhattacharya, I. Adaptive Step Size Incremental Conductance Based Maximum Power Point Tracking (MPPT). In Proceedings of the 47th IEEE Photovoltaic Specialists Conference (PVSC), Calgary, AB, Canada, 15 June–21 August 2020; Volume 2020, pp. 2335–2339. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. A Novel Adaptive P&O MPPT Algorithm Considering Sudden Changes in the Irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MPPT Algorithm | Tracking Accuracy | ||
|---|---|---|---|
| Constants voltage | 15.76 [W] | 19.69 [W] | 96.5 [%] |
| Perturb and observe | 15.35 [W] | 19.08 [W] | 86.7 [%] |
| Incremental Conductance | 15.59 [W] | 19.78 [W] | 97.5 [%] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Lee, H.; Shon, J. Improvement of Power Production Efficiency Following the Application of the GD InC Maximum Power Point Tracking Method in Photovoltaic Systems. Energies 2024, 17, 5148. https://doi.org/10.3390/en17205148
Han J, Lee H, Shon J. Improvement of Power Production Efficiency Following the Application of the GD InC Maximum Power Point Tracking Method in Photovoltaic Systems. Energies. 2024; 17(20):5148. https://doi.org/10.3390/en17205148
Chicago/Turabian StyleHan, Jeongwon, Hyunjae Lee, and Jingeun Shon. 2024. "Improvement of Power Production Efficiency Following the Application of the GD InC Maximum Power Point Tracking Method in Photovoltaic Systems" Energies 17, no. 20: 5148. https://doi.org/10.3390/en17205148
APA StyleHan, J., Lee, H., & Shon, J. (2024). Improvement of Power Production Efficiency Following the Application of the GD InC Maximum Power Point Tracking Method in Photovoltaic Systems. Energies, 17(20), 5148. https://doi.org/10.3390/en17205148