1. Introduction
With the continuous growth of power load and the extensive access of distributed new energy resources, the traditional power distribution system has been developed significantly [
1]. As an important part of the power system, scientific and reasonable planning of the distribution network is an important prerequisite to ensure its safe and economic operation [
2]. However, on the one hand, with the continuous increase of distributed new energy resources in the distribution network, their uncertainty has brought great challenges to the grid expansion planning of the distribution network [
3,
4]. On the other hand, in the expansion planning of the distribution network, the existing single-stage planning and the multi-stage non-rolling planning methods have certain limitations, which limit the improvement of the investment benefits. Therefore, in order to improve the rationality and economy of distribution network construction, it is necessary to carry out an in-depth study on the expansion planning of distribution network based on the consideration of distributed new energy resources.
Depending on the number of planning stages, existing planning methods for distribution network expansion can be categorized into two types, namely single-stage planning methods [
5,
6,
7] and multi-stage non-rolling planning methods [
8,
9,
10]. The single-stage planning approach treats the entire planning cycle as one planning stage and develops a one-time planning program. For example, Yi et al. [
5] established a joint expansion planning model of grid-storage for distribution network based on modified augmented relaxed optimal power flow, and determined the optimal planning scheme of grid-storage in the planning starting year. Xie et al. [
6] took the distribution network planning cycle as a planning stage and established a coupled distribution system-transportation network (DS-TN) expansion planning model based on the coupling characteristics between the distribution system (DS) and the transportation network (TN), which optimized the planning scheme for DS and TN and improved the overall economy of the coupling system. The multi-stage non-rolling planning method divides the planning cycle into several planning stages and develops planning schemes for each stage separately. For example, Kabirifar et al. [
8] divided the 15-year planning cycle of the distribution network into three planning stages, each of which is five years. Based on this, a multi-stage double-layer expansion planning model for the distribution network considering local energy market transactions is established, which realized the coordination of the various planning stages and improved the investment benefits. Feng et al. [
9] divided the 21-year planning cycle of the distribution network into three planning stages on average. Based on this, a multi-stage expansion planning model of the distribution network considering the active management of distributed generation and network reconstruction was established, which improved the reliability and economy of the distribution network. However, the above methods have certain limitations. Although the single-stage planning method is widely used, the differentiated expansion demand in different planning years may lead to low equipment utilization efficiency and reduce the investment benefits. Furthermore, the investment benefits of the multi-stage non-rolling planning method is also subject to great uncertainty, as it is difficult for investors to accurately predict how various factors will change during the planning cycle. If rolling revisions can be made to the planning schemes of each stage based on the latest information during the planning cycle, it is expected to improve the utilization efficiency of equipment and improve investment benefits.
In addition, due to the strong coupling of planning and operation [
11], the operation and scheduling of distribution networks is one of the core issues affecting their expansion planning. The operational objectives of distribution networks in existing studies include: maximizing the photovoltaic (PV) consumption rate [
12], minimizing the total cost of expected energy not supplied [
13], minimizing the total operating cost [
14,
15,
16], etc. For example, Gao et al. [
12] established a distribution network operation model with the objectives of maximum PV consumption rate and minimum standard deviation of line margin, which determined the operation strategy of the distribution network during the planning cycle, and provided a basis for the development of the distribution network planning scheme. Li et al. [
15] established a distribution network operation model with the objective of minimizing total operating costs, taking into account multiple operating costs such as load shedding cost, the cost of purchasing power from the higher grid and PV abandonment cost. The power grid charges power transmission and distribution fee, called network fee, for providing power transmission and distribution services to users, which is an important part of the grid’s revenue. The network fee is roughly equal to the difference between the users’ electricity bill and the cost of purchasing power from the higher grid. However, when calculating the total operating costs, the existing studies often neglect the users’ electricity bill while taking into account the costs of purchasing power from the higher grid. If the active load shedding is not taken into account, the users’ electricity bill can be considered as a parameter and can be ignored. However, if the active load shedding is considered, the users’ electricity bill is related to the load shedding amount, which will affect the network fee, thus affecting the total operating cost of the distribution network and its expansion planning scheme. Therefore, the changes in network fee must be taken into account.
Energy storage plays an important role in the distribution network by using its energy transfer characteristics to peak shaving and valley filling, thereby delaying or avoiding the expansion of power lines. During the operation of energy storage, as the number of charge and discharge cycles increases, its maximum capacity will gradually decay, making its actual performance being lower than expected. However, existing researches on distribution network expansion planning [
5,
13,
17] often overlook the capacity decay characteristics of energy storage and consider the maximum capacity of energy storage as a constant value. This may lead to investors overestimating the adjustment ability of energy storage, especially in the late stage of planning when the adjustment demand of energy storage is high and the capacity decay is severe, thereby affecting the distribution network expansion planning scheme and threatening the safe and economic operation of the distribution network. Therefore, it is necessary to consider the capacity decay characteristics of energy storage in the distribution network expansion planning research. Due to the complexity of the energy storage capacity decay process, it is difficult to include it in optimization models. Existing researches on energy storage planning and operation often does not consider the reduction of maximum energy storage capacity, but measures the loss caused by capacity decay through the capacity decay cost [
18,
19]. For example, Tang et al. [
18] used a quadratic function of charge and discharge power to describe the loss caused by capacity decay. The method may play a good role in user side energy storage planning research, but it is not applicable to the distribution network expansion planning problem studied in this paper. Because the maximum energy storage capacity in this problem directly affects whether the line current exceeds the limit and determines the expansion planning scheme. It is difficult to calculate the loss caused by capacity decay through capacity decay cost. Therefore, it is necessary to consider the changes in the maximum energy storage capacity during the planning period.
To address the above problems, this paper analyses the limitations of the existing planning methods and proposes a multi-stage rolling planning method for distribution networks on this basis. Then, a multi-stage rolling planning model for distribution networks considering conditional value at risk (CVaR) is established with the objective of minimizing the total planning and operating cost of distribution network. The users’ electricity bill is included in the objective function. And the operating cost uncertainty in the distribution network expansion planning process is quantified by CVaR. The capacity decay characteristics of energy storage in the distribution network are characterized by rainflow counting method. Next, an iterative solution framework considering energy storage capacity decay is proposed to solve the proposed model. Finally, an 18-node distribution network is used as an example to verify the effectiveness of the proposed method. The comparison of the work of this paper with other works from the literature is shown in
Table 1. And the research framework of this paper is shown in
Figure 1.
The main innovation points of this paper are as follows.
- (1)
For the problems of poor investment benefits and low equipment utilization efficiency of the existing distribution network expansion planning methods, this paper proposes a multi-stage rolling planning method for distribution networks, which can make rolling amendments to the planning scheme of each stage according to the latest information during the planning cycle and helps to improve the reasonableness and economy of the distribution network planning scheme.
- (2)
For the problem that the existing distribution network expansion planning studies neglect the changes in network fee, this paper incorporates the users’ electricity bill into the objective function of the distribution network planning model and demonstrates the necessity of taking into account this part of the revenue. So that the operating cost of the distribution network can be calculated more accurately, and a more economic and reasonable expansion planning scheme can be formulated.
- (3)
For the problem that the existing distribution network expansion planning studies neglect the capacity decay characteristics of energy storage, this paper uses the rainflow counting method to accurately characterize the capacity decay characteristics of energy storage and proposes an iterative solution framework that considers energy storage capacity decay to solve the proposed model, which helps optimize the distribution network expansion planning scheme and ensure the safe and economic operation of the distribution network.
The rest of this paper is structured as shown below.
Section 2 analyses the limitations of existing single-stage planning and multi-stage non-rolling planning methods, and then proposes a multi-stage rolling planning method for distribution networks on this basis.
Section 3 constructs a multi-stage rolling planning model for distribution networks taking into account CVaR. The model solving method is proposed in
Section 4.
Section 5 conducts numerical experiments on various cases to verify the feasibility and validity of the proposed method. In
Section 5, several sets of simulations are carried out to verify the effectiveness of the proposed method. Finally, conclusions and future research directions are given in
Section 6.
4. Model Solution
The model proposed in this paper contains integer variables
,
and quadratic convex constraints, which is the second-order cone power flow constraints. It means that the proposed model belongs to the mixed integer second-order cone programming, which can be solved by the commercial solver Gurobi. On this basis, the proposed model could be simplified. The integer variable
represents the charging and discharging states of the energy storage, which makes the energy storage not able to charge and discharge at the same time. When the objective function of the model is related to the cost, the integer variable
could be omitted. Because the simultaneous charging and discharging of the energy storage will result in additional power loss and increase the total cost. Even if the charging and discharging states of the energy storage are not limited, the energy storage will not charge and discharge at the same time when the optimal solution of the distribution network expansion planning model is obtained. Therefore, Equation (22) can be replaced by Equation (30), which is one of the common simplification methods used in energy storage researches.
The capacity decay of energy storage is a nonlinear process that is difficult to be included in optimization models. Therefore, this paper refers to reference [
28] and constructs an iterative solution framework. During each iteration, the health state coefficient of energy storage
is calculated offline using Equation (31). The solution process is shown in
Figure 3 (where
n is the number of iterations).
where
A,
B, and
C are parameters related to the maximum discharging depth of the energy storage
D;
is the number of cycles of the energy storage at node
i at a certain discharging depth
D in year
k − 1. The type of energy storage battery in this paper is lithium iron phosphate battery.
5. Case Study
5.1. Case Settings
In this paper, an 18-node distribution system is used for the case study, and the initial network is shown in
Figure 4. The reference voltage of this distribution system is 10 kV, with a total of 17 lines and a power reference value of 1 MVA. The data of existing lines and lines to be expanded are shown in the
Table A1 and
Table A2 of the
Appendix A. For the distributed new energy resources output and customer load in the case, 4 typical daily scenes (3 general load scenes based on clustering and 1 peak load scene based on robust theory [
29]) are considered, and each scene includes 24 time points. The capacity of both PV and WT is 500 kW. Node 6 is configured with energy storage with a capacity of 10 MWh and a maximum charging and discharging power of 5 MW. And node 14 is configured with energy storage with a capacity of 3 MWh and a maximum charging and discharging power of 1.5 MW. The set of load shedding nodes is {2, 4, 8, 11, 12, 13, 16, 17}. The rest of the key parameters in the case are shown in
Table 2. The model in this paper is programmed in MATLAB-R2023a and solved by Gurobi-9.5.2.
5.2. Impact of Multi-Stage Rolling Planning
In order to compare and analyze the impact of the multi-stage rolling planning approach on the distribution network expansion planning scheme and the total investment and operation cost, this paper designs the following three cases, in which the capacity decay of energy storage is taken into account.
Case 1: The whole planning cycle is treated as a planning stage, and the single-stage planning method is used to develop the distribution network expansion planning scheme.
Case 2: The 9-year planning cycle is divided into three planning stages on average, and the planning scheme of each stage is developed in the start year of the planning period.
Case 3: The 9-year planning cycle is divided into three planning stages on average. Develop the planning scheme of each stage in the start year of the planning period, and make rolling amendments to the planning scheme in the start year of each stage.
This paper considers that the load at each node changes year by year during the planning cycle. The investor needs to formulate the planning scheme based on the annual load growth rate prediction results, assuming that the prediction results within 3 years are completely accurate. The longer the prediction time, the larger the prediction error. The annual load growth rate curve of each node is shown in
Figure 5.
On this basis, the results of the distribution network expansion planning in each case are shown in
Table 3.
Comparing Case 1 and Case 2, it can be seen that the single-stage planning and the multi-stage non-rolling planning methods result in the same network structure at the end of the planning period, as the prediction results of the annual load growth rate are the same. The difference lies in the fact that the multi-stage non-rolling planning method carries out line expansion in stages according to the line expansion needs of each planning stage. On the one hand, after considering the time value of money, the method can reduce the investment cost of the line by 16.77%. On the other hand, the multi-stage non-rolling planning can improve the utilization efficiency of equipment, which extends the working life of equipment and improves the investment benefits.
The planning scheme in Case 2 is actually the same to the planning scheme developed in Case 3 in the 1st planning stage. As can be seen in
Figure 5 and
Table 3, over time the investor is able to more accurately predict the changes of the annual load growth rate and make rolling revisions to the planning scheme accordingly. Case 2 expands line 13–14 due to an overestimation of their expansion needs. While Case 3 more accurately predicts the expansion needs of the lines by continually revising the planning scheme based on the latest information, and finally avoids the expansion of line 13–14, which reduces the investment cost of the line by 27.27% and improves the investment benefits.
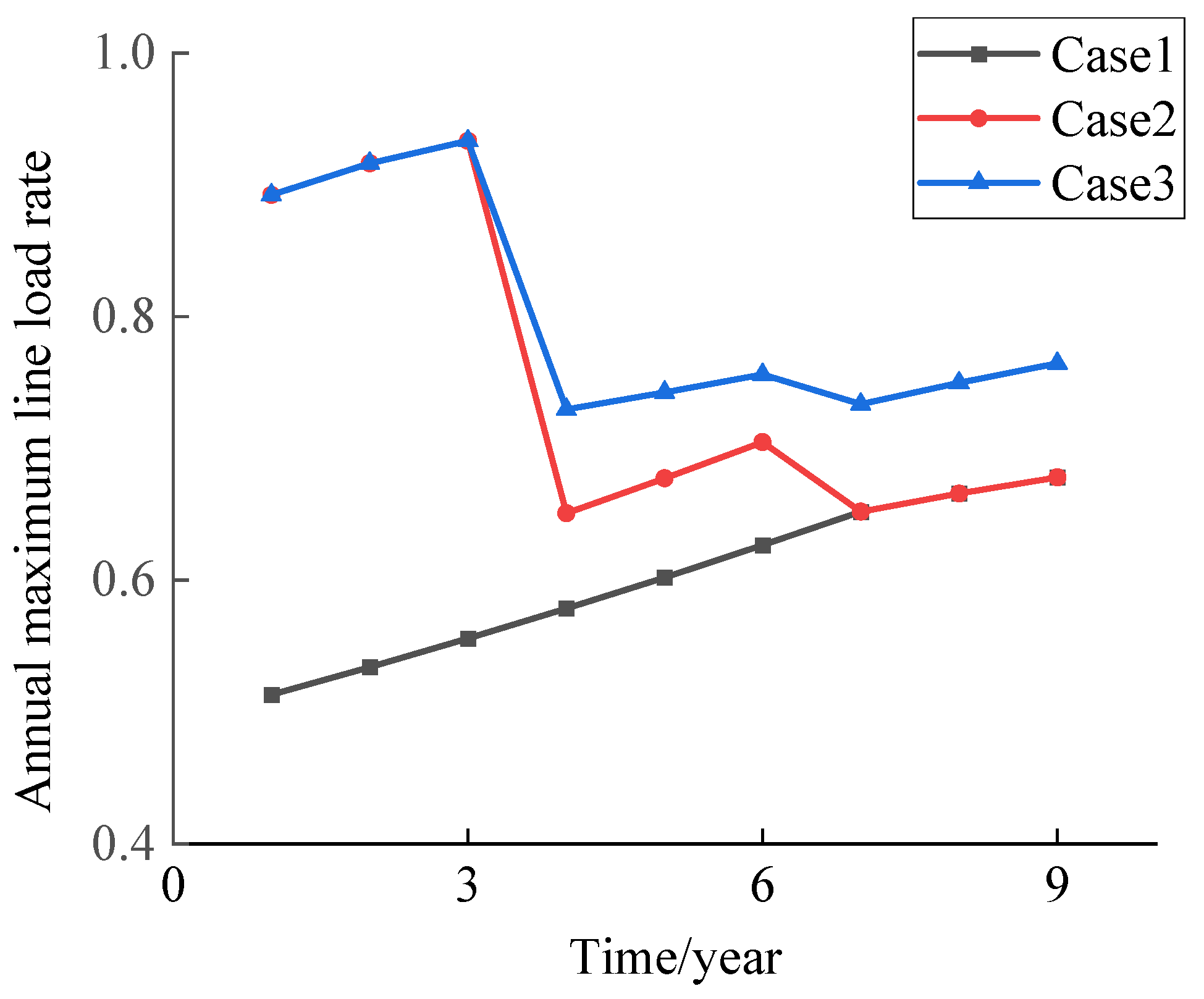
Then, in order to observe the utilization rate of the expanded lines during the planning cycle, the annual maximum line load rate curves of the expanded lines during the planning cycle are plotted in this paper, as shown in
Figure 6.
As can be seen in
Figure 6, the single-stage planning method has a low equipment utilization rate. And by dividing the planning cycle into multiple planning stages, the multi-stage non-rolling planning method is able to alleviate the contradictions caused by the differentiated line expansion needs in different planning years and improve the utilization efficiency of equipment. On this basis, multi-stage rolling planning makes rolling amendments to the planning scheme on the basis of the latest information, which further enhances the utilization efficiency of equipment and improves the investment benefits.
5.3. Impact of the Users’ Electricity Bill
This paper points out that if the active load shedding is taken into account, the users’ electricity bill is related to the load shedding amount, which has an impact on the total operating cost of the distribution network, and thus affects the formation of the expansion planning scheme. Therefore, the users’ electricity bill must be included in the objective function. In order to study the impact of the users’ electricity bill on the distribution network expansion planning scheme, this paper designs Case 4 for simulation and analysis.
Case 4: The objective function is adjusted on the basis of Case 3, and the users’ electricity bill is no longer taken into account.
The simulation results are shown in
Table 4.
Comparing Case 3 and Case 4 according to
Table 4, it can be seen that the unit cost of load shedding in Case 4 is reduced after not taking into account the users’ electricity bill. As a result, Case 4 does not expand line 12–16, and control the line currents within a safe range by load shedding. However, the planning scheme is developed under the false underestimation of load shedding costs. In fact, the objective function value increases instead under this scheme, which means the investment benefits are reduced. Therefore, if the active load shedding is considered in the expansion planning of distribution network, the users’ electricity bill must be included in the objective function, otherwise the economics of the planning scheme will be affected and the investment benefits will be reduced.
5.4. Impact of the Energy Storage Capacity Decay
Energy storage can utilize its energy transfer characteristics to peak shaving and valley filling, thereby delaying or avoiding the expansion of power lines. The degree of capacity decay of energy storage directly affects whether the line current exceeds the limit and determines the expansion planning scheme. Therefore, in the research of distribution network expansion planning, the capacity decay characteristics of energy storage must be taken into account. In order to study the impact of energy storage capacity decay characteristics on distribution network expansion planning scheme, this paper designs Case 5 for simulation and analysis.
Case 5: On the basis of Case 3, the capacity decay of energy storage is not considered, which means the maximum capacity of energy storage will always be the same as the maximum capacity of the first year.
The simulation results are shown in
Table 5.
The energy storage installed at node 6 can reduce the expansion demand of line 5–6 by peak shaving and valley filling. According to
Table 5, it can be seen that without considering the capacity decay characteristics of energy storage, Case 5 believes that the current of line 5–6 will not exceed the limit under the effect of energy storage, so there is no need to expand line 5–6. But in fact, the capacity of energy storage will decay during the planning cycle, resulting in its actual performance being lower than expected. The capacity decay situation of energy storage at node 6 in Case 5 during the planning cycle is shown in
Figure 7. According to
Figure 7, it can be seen that the maximum capacity of energy storage at the end of the planning cycle is only 87.6% of the initial value, and the peak shaving and valley filling ability of energy storage is significantly reduced, resulting in current exceeding the limit of line 5–6 in Case 5. It will cause power accidents and threatens the safe operation of the power grid. Therefore, in the research of distribution network expansion planning, the capacity decay characteristics of energy storage must be taken into account, otherwise it will cause great safety hazards.
5.5. Impact of the Risk Appetite Coefficient
For investors with different levels of risk appetite, the generated distribution network grid expansion planning schemes will also be different. In order to study the impact of risk appetite coefficient on the distribution grid expansion planning scheme, this paper designs Case 6 for simulation and analysis.
Case 6: The risk appetite coefficient is adjusted on the basis of Case 3 to simulate investors with different levels of risk appetite.
The simulation results are shown in
Table 6.
According to
Table 6, it can be seen that as the risk appetite coefficient increases, investors’ decisions become more conservative. They tend to reduce the risk of high operating costs by expanding the lines more or earlier, and the value of CVaR gradually decreases. As the cost of reducing risk, the expected total cost of investors increases. When CVaR is not considered, it is equivalent to a risk appetite coefficient of 0. Investors will make very aggressive decisions, and they no longer consider the risk of high operating costs. Although the expected total cost is lower, the value of CVaR is large, which means high investment risks.
5.6. Robustness Analysis
The robustness of a model refers to its ability to resist errors in input data. A robust model can maintain stable performance and accurate results with various uncertainties in data. In order to study the robustness of the multi-stage rolling planning model, this paper designs Case 7 for simulation and analysis.
Case 7: On the basis of Case 3, it is assumed that the load growth rate prediction results within 3 years is no longer completely accurate, but there are some errors. A positive error rate means that the predicted value is greater than the actual value.
The simulation results are shown in
Table 7.
According to
Table 7, it can be seen that the multi-stage rolling planning model has good robustness when the error rate is within ±5%. The optimal solution of the model is the best expansion planning scheme. When the error rate is 10%, the accuracy of the results will be slightly affected, and the total cost will increase by 0.08%. When the error rate is −10%, underestimating user load will cause the line current to exceed the limit and threaten the safe operation of the power grid. Therefore, on the one hand, it is necessary to study load growth rate prediction methods to reduce prediction errors. On the other hand, the load growth rate should be avoided from being underestimated to reduce safety hazards.
6. Conclusions
Existing single-stage planning and multi-stage non-rolling planning methods suffer from low equipment utilization efficiency and poor investment benefits. Moreover, many researches of distribution network expansion planning often overlook the capacity decay characteristics of energy storage. To address the shortcomings of existing research, this paper proposes a multi-stage rolling planning method for distribution networks, and establishes a multi-stage rolling planning model for distribution networks taking into account CVaR with the goal of minimizing the total cost of investment and operation of distribution networks. Besides, this paper also uses the rainflow counting method to characterize the capacity decay characteristics of energy storage in the distribution network, and proposes an iterative solution framework that considers energy storage capacity decay to solve the proposed model. Finally, the following conclusions are obtained through the simulation of cases.
- (1)
Compared to single-stage planning and multi-stage non-rolling planning, the multi-stage rolling planning method can not only develop the planning scheme based on the differentiated expansion demand in different planning years, but also make rolling amendments to the planning scheme of each stage according to the latest information during the planning cycle, which could improve the utilization efficiency of equipment and the investment benefits. As the result, the multi-stage rolling planning method could reduce the investment cost by approximately 27.27%.
- (2)
In the establishment of the distribution network expansion planning model, if the active load shedding is considered, it is necessary to take into account the users’ electricity bill in the objective function. Otherwise, it will lead investors to underestimate the load shedding costs mistakenly and develop terrible planning scheme, which increases the total cost by approximately 2750 USD in Case 4.
- (3)
The maximum capacity of energy storage will continuously decay during operation, reducing to 87.6% of the initial capacity or even lower. This directly affects whether the line current exceeds the limit and determines the expansion planning scheme. Therefore, the capacity decay characteristics of energy storage must be taken into account in the research of distribution network expansion planning, otherwise it will cause the line current to exceed the limit and threaten the safe operation of the power grid.
- (4)
CVaR can be used to measure the risk of operating costs during the distribution network expansion planning. Different investors have varying risk appetite. A model that does not consider CVaR views investors as very aggressive. Instead, the proposed model considering CVaR can develop planning schemes based on investors’ risk appetite, balancing risks and earnings.
Currently, the way of dividing the planning stages in our work is subjective, which may not be the best way. Besides, when the scale of the distribution network is large or there are many scenes, the curse of dimensionality will make it difficult to solve the proposed mixed-integer program. In the future, research will be conducted on the division method of planning stages, developing a scientifical and reasonable stage division method based on the predicted information of load and cost of load shedding etc. In addition, the solution method of the proposed model will be further improved, increase the solving speed of the model, and enhance the applicability of the proposed method to large-scale and multi-scene distribution networks.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}