
A New Magnetic Coupler with High Misalignment Tolerance and Inherent Constant Current–Constant Voltage for Underground Wireless Charging


Abstract
1. Introduction
2. Theoretical Derivation of Coil Anti-Misalignment
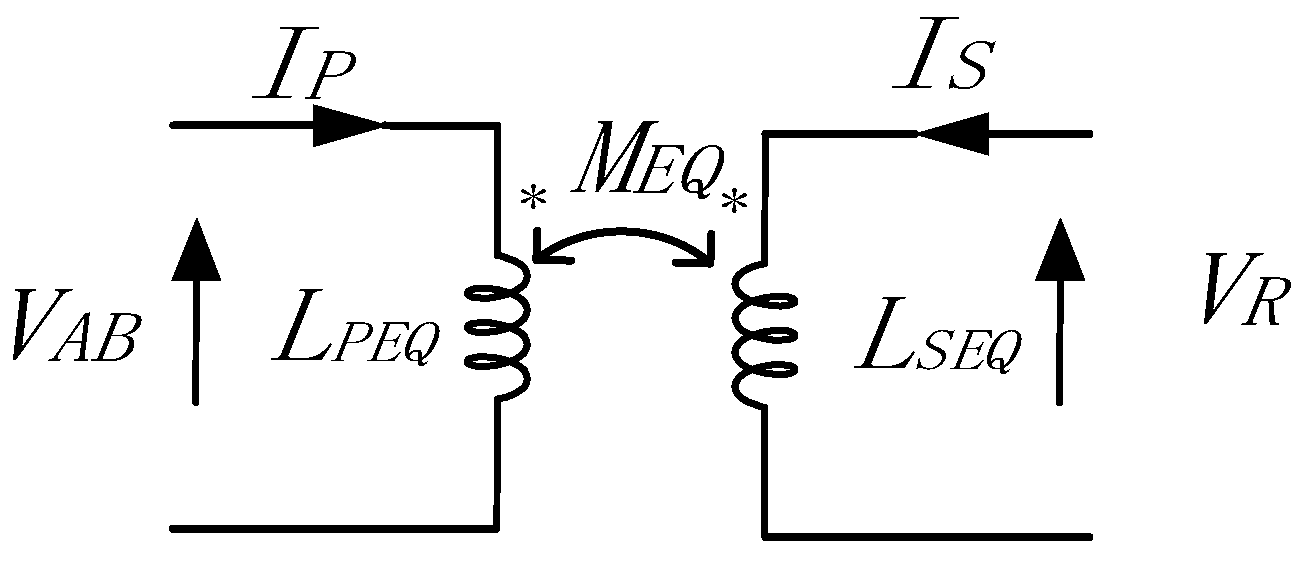
2.1. Analysis of Coupler Misalignment Tolerance Error Based on CL Compensation Network
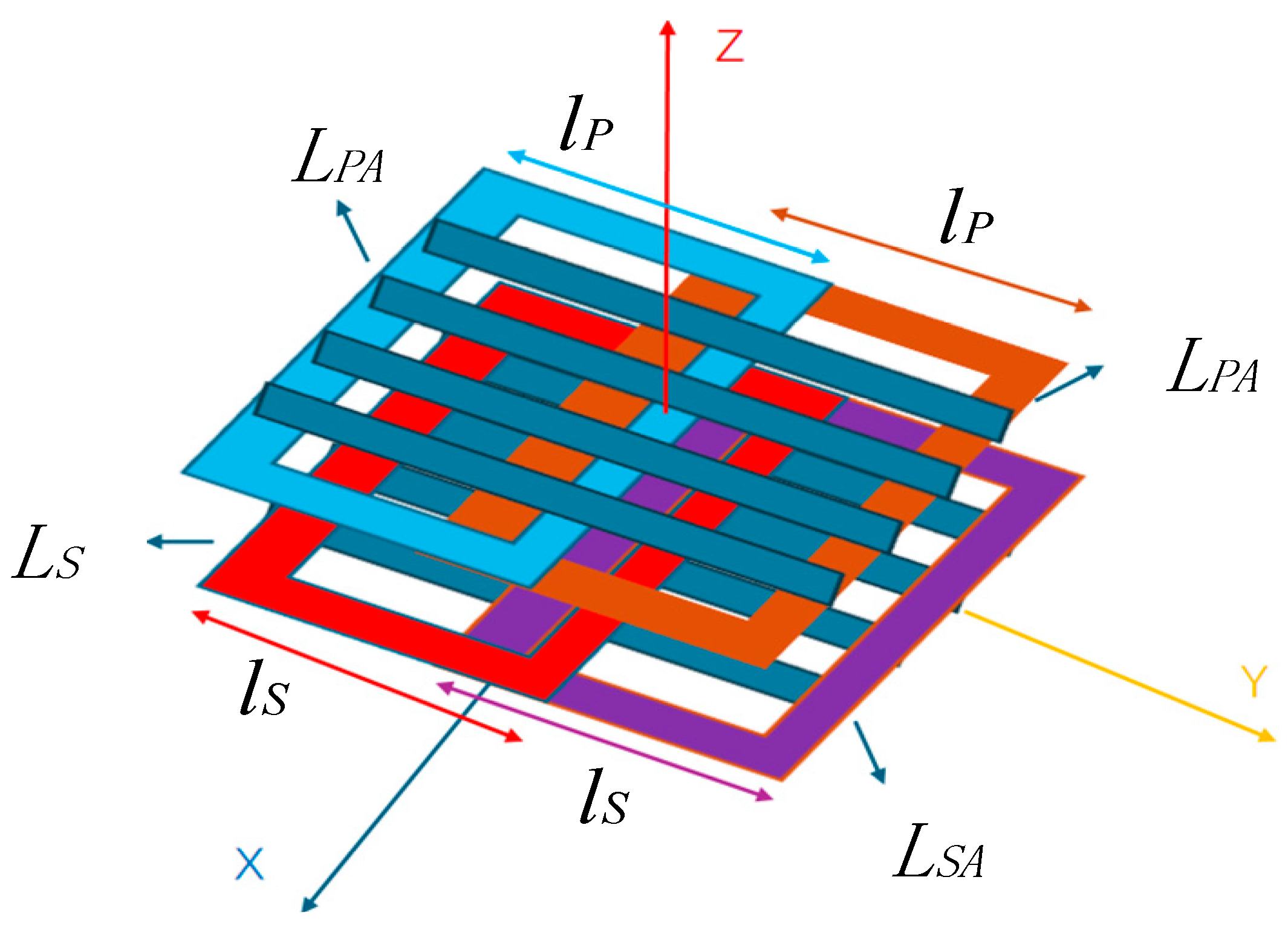
2.2. Hybrid Coupler Design with -Type BP Pad
- Fix the coupler alternating frequency and the air gap between the transmitter and the receiver.
- Based on the above environmental conditions, configure the coils LP, LPA, LS, LSA and the number of turns of each coil NP, NPA, NS, NSA.
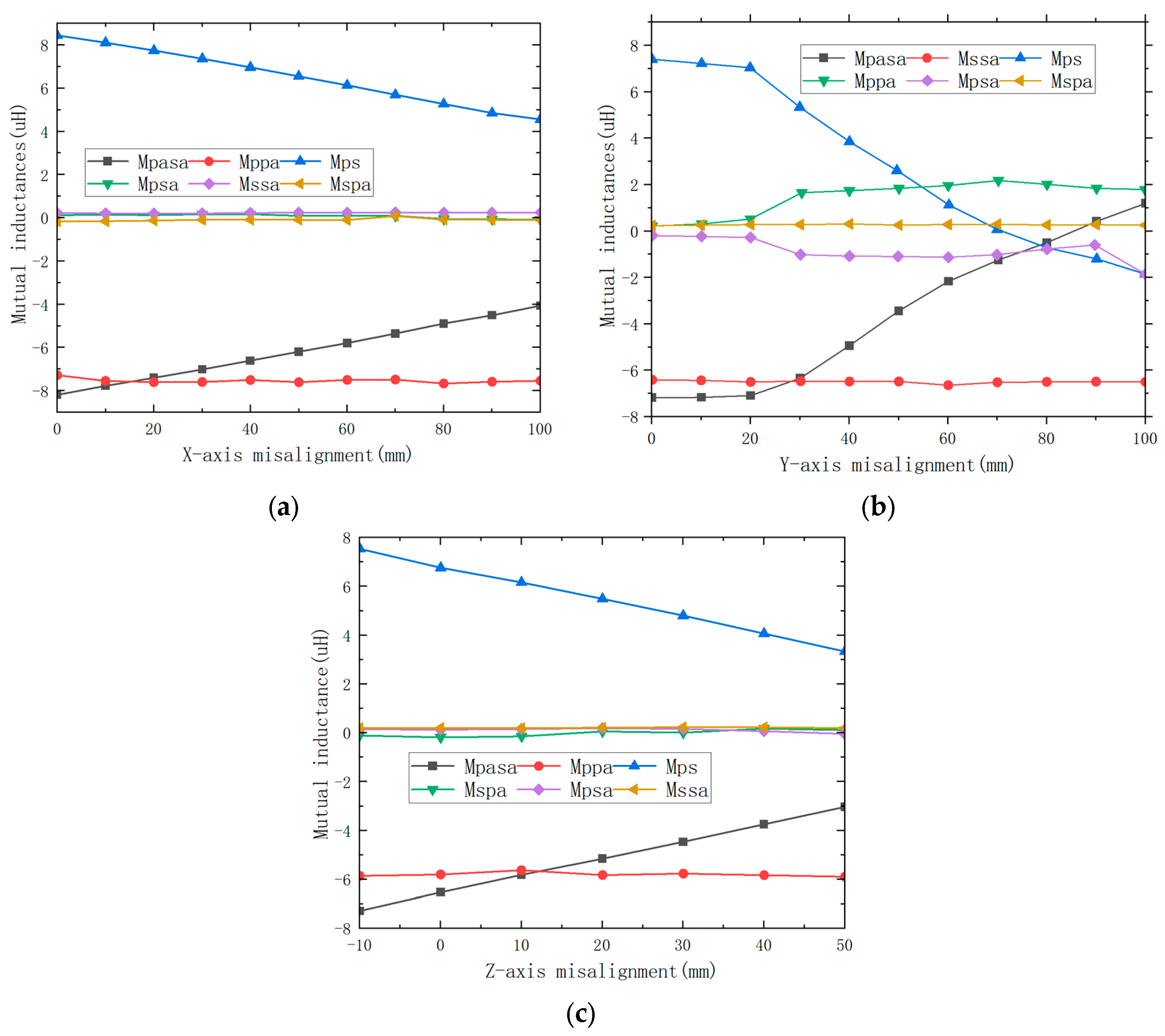
- Measure MPS, MPASA, MSSA, MPPA, MPSA, MSPA between the above coils, and determine whether the mutual inductances |MSSA|,|MSPA| and |MSPA| are all 0?
- If step 3 is not satisfied, adjust the parameters in step 2 and repeat steps 3 and 4.
- Move the transmitter and the receiver to measure whether the fluctuation of the equivalent mutual inductance |MEQ| is less than 5%. And record the misalignment distance. If the condition is not satisfied, repeat steps 2–5.
- Calculate LS1 by Formula (14) and calculate CPA, CSA, CS1 by Formula (4).
3. Design of Hybrid Coupler Using BP Pad Based on S/LCC Topology
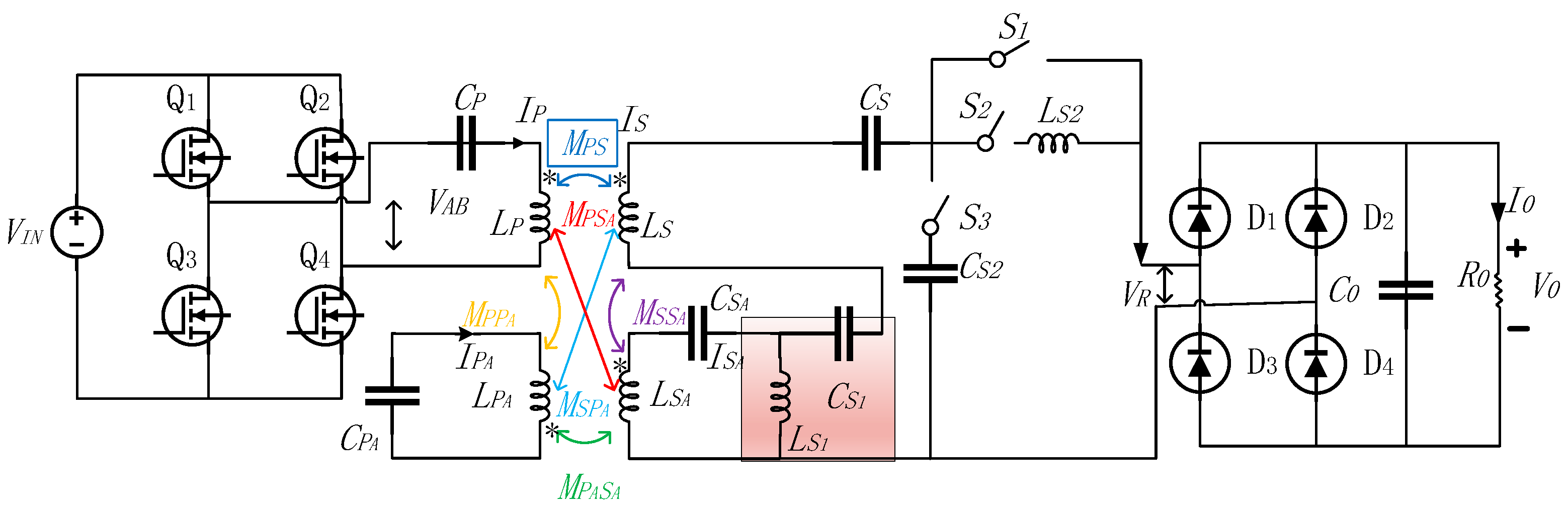
3.1. Derivation of Coupler Output and Compensation
3.2. Analysis of Coupler CC Output
3.3. Analysis of Coupler CV Output
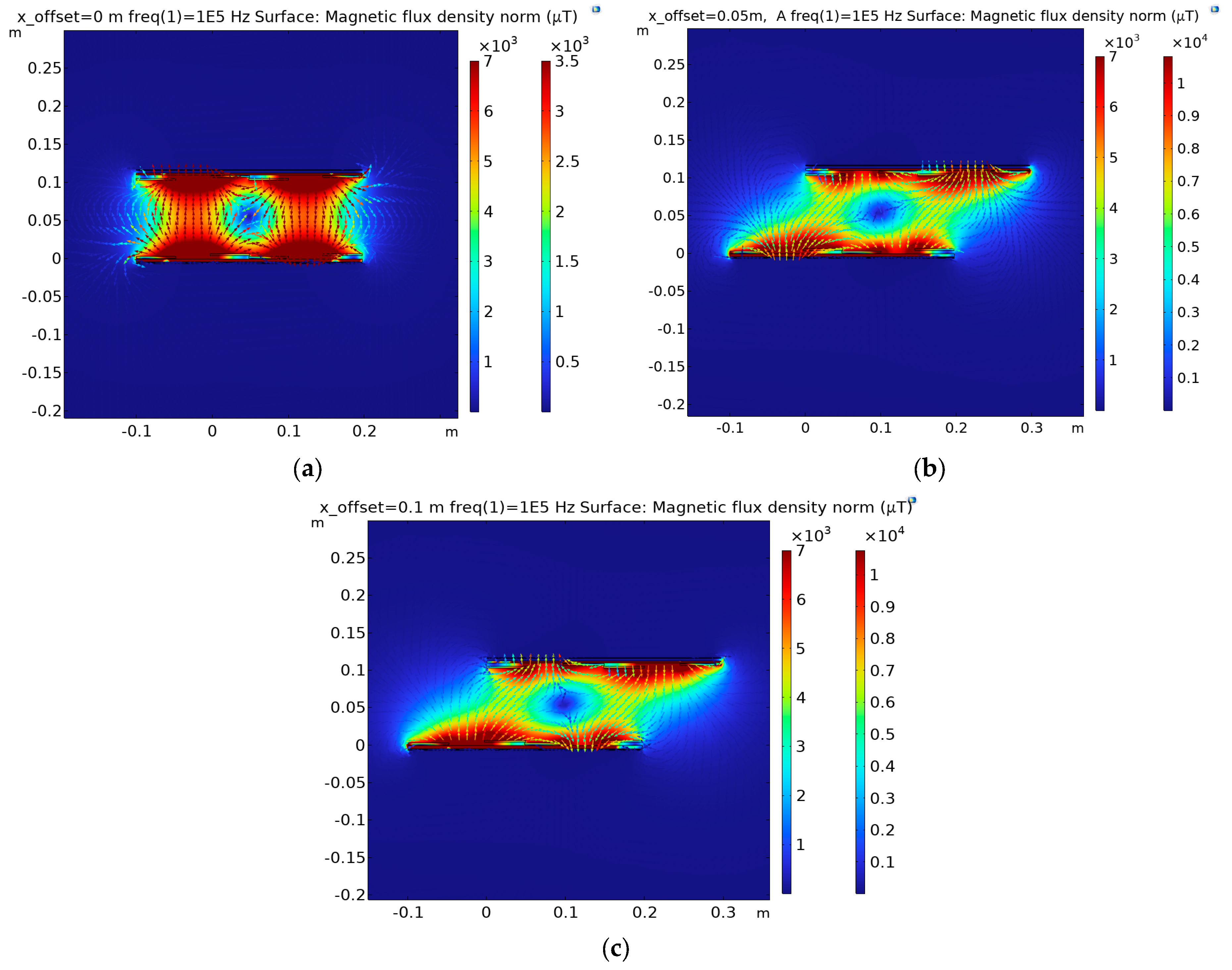
3.4. Magnetic Field Simulation of Downhole Coupling Device
4. Experimental Verification
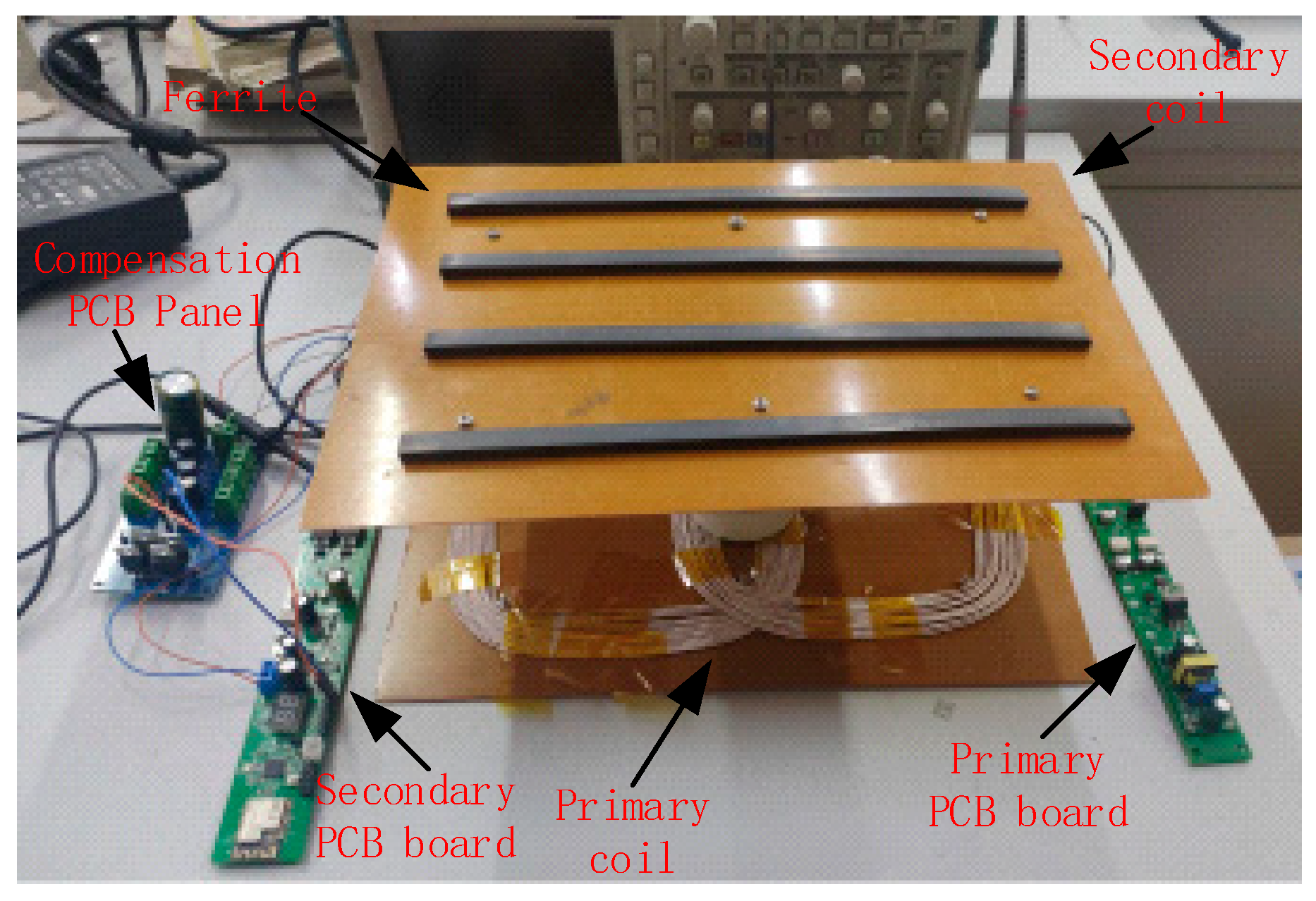
4.1. Build the Experimental Prototype
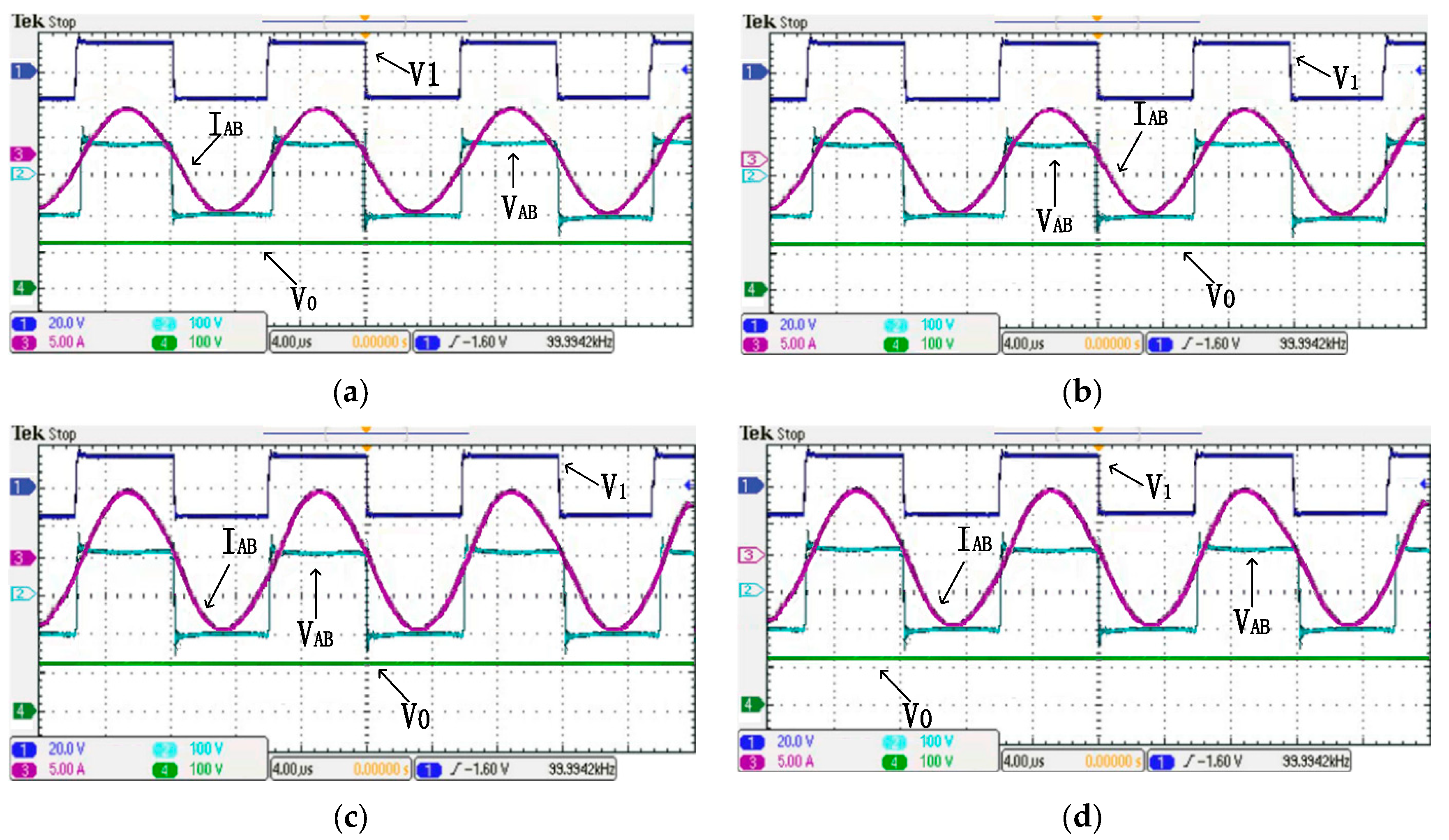
4.2. Misalignment Tolerance and CC Output
4.3. Misalignment Tolerance and CV Output
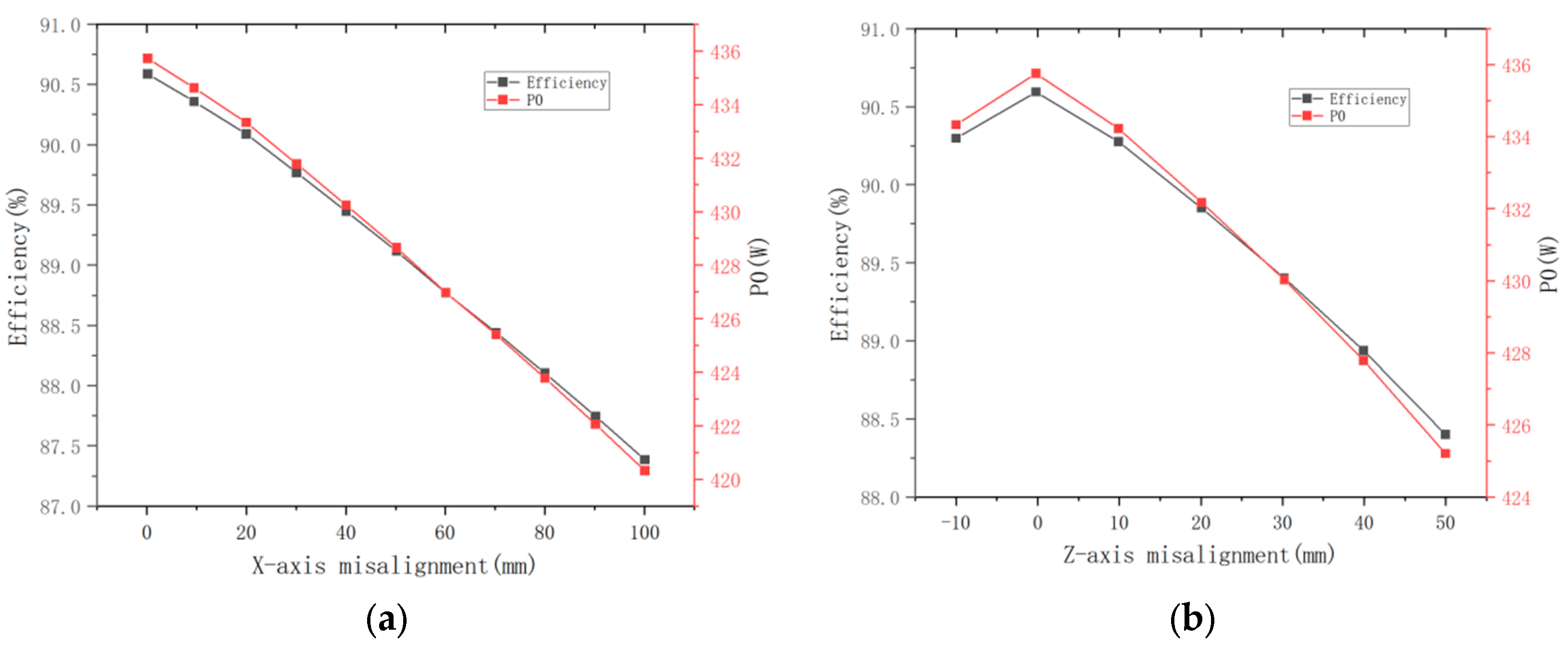
4.4. Misalignment Tolerance and Output Efficiency
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nithiyanandam, V.; Sampath, V. Approach-Based Analysis on Wireless Power Transmission for Bio-Implantable Devices. Appl. Sci. 2022, 13, 415. [Google Scholar] [CrossRef]
- Nutwong, S.; Sangswang, A.; Naetiladdanon, S. An inverter topology for wireless power transfer system with multiple transmitter coils. Appl. Sci. 2019, 9, 1551. [Google Scholar] [CrossRef]
- Yang, X.; Yang, J.; Fan, J.; Wang, B.; Li, D. A Magnetic Field Containment Method for an IPT System with Multiple Transmitting Coils Based on Reflective Properties. Electronics 2023, 12, 653. [Google Scholar] [CrossRef]
- Mai, R.; Chen, Y.; Zhang, Y.; Yang, N.; Cao, G.; He, Z. Optimization of the passive components for an S-LCC topology-based WPT system for charging massive electric bicycles. IEEE Trans. Ind. Electron. 2017, 65, 5497–5508. [Google Scholar] [CrossRef]
- Feng, H.; Tavakoli, R.; Onar, O.C.; Pantic, Z. Advances in high-power wireless charging systems: Overview and design considerations. IEEE Trans. Transp. Electrif. 2020, 6, 886–919. [Google Scholar] [CrossRef]
- Jo, S.; Shin, C.S.; Kim, D.H. Novel design method in wireless charger for SS topology with current/voltage self-limitation function. Appl. Sci. 2023, 13, 1488. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Tong, X. Research and Design of Misalignment-Tolerant LCC–LCC Compensated IPT System with Constant-Current and Constant-Voltage Output. IEEE Trans. Power Electron. 2022, 38, 1301–1313. [Google Scholar] [CrossRef]
- Li, G.; Jo, C.H.; Shin, C.S.; Jo, S.; Kim, D.H. A Load-Independent Current/Voltage IPT Charger with Secondary Side-Controlled Hybrid-Compensated Topology for Electric Vehicles. Appl. Sci. 2022, 12, 10899. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Efficient wireless drone charging pad for any landing position and orientation. Energies 2021, 14, 8188. [Google Scholar] [CrossRef]
- ElGhanam, E.; Hassan, M.; Osman, A.; Kabalan, H. Design and performance analysis of misalignment tolerant charging coils for wireless electric vehicle charging systems. World Electr. Veh. J. 2021, 12, 89. [Google Scholar] [CrossRef]
- Varikkottil, S.; Febin Daya, J.L. Estimation of optimal operating frequency for wireless EV charging system under misalignment. Electronics 2019, 8, 342. [Google Scholar] [CrossRef]
- Ghazizadeh, S.; Ahmed, K.; Seyedmahmoudian, M.; Mekhilef, S.; Chandran, J.; Stojcevski, A. Critical Analysis of Simulation of Misalignment in Wireless Charging of Electric Vehicles Batteries. Batteries 2023, 9, 106. [Google Scholar] [CrossRef]
- Niu, S.; Zhao, Q.; Chen, H.; Yu, H.; Niu, S.; Jian, L. Underwater wireless charging system of unmanned surface vehicles with high power, large misalignment tolerance and light weight: Analysis, design and optimization. Energies 2022, 15, 9529. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, Y.; Liu, X.; Xu, D.; Cai, L. An LC/S compensation topology and coil design technique for wireless power transfer. IEEE Trans. Power Electron. 2017, 33, 2007–2025. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, Y.; Liu, X.; Xu, D. S/CLC compensation topology analysis and circular coil design for wireless power transfer. IEEE Trans. Transp. Electrif. 2017, 3, 496–507. [Google Scholar] [CrossRef]
- Mai, R.; Chen, Y.; Li, Y.; Zhang, Y.; Cao, G.; He, Z. Inductive power transfer for massive electric bicycles charging based on hybrid topology switching with a single inverter. IEEE Trans. Power Electron. 2017, 32, 5897–5906. [Google Scholar] [CrossRef]
- Budhia, M.; Boys, J.T.; Covic, G.A.; Huang, C.Y. Development of a single-sided flux magnetic coupler for electric vehicle IPT charging systems. IEEE Trans. Ind. Electron. 2011, 60, 318–328. [Google Scholar] [CrossRef]
- Luo, Z.; Nie, S.; Pathmanathan, M.; Han, W.; Lehn, P.W. 3-D analytical model of bipolar coils with multiple finite magnetic shields for wireless electric vehicle charging systems. IEEE Trans. Ind. Electron. 2021, 69, 8231–8242. [Google Scholar] [CrossRef]
- Kim, S.; Covic, G.A.; Boys, J.T. Tripolar pad for inductive power transfer systems for EV charging. IEEE Trans. Power Electron. 2016, 32, 5045–5057. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, B.; Zhou, X.; Li, Q.; He, Z.; Mai, R.; Lai, J.S. A hybrid inductive power transfer system with misalignment tolerance using quadruple-D quadrature pads. IEEE Trans. Power Electron. 2019, 35, 6039–6049. [Google Scholar] [CrossRef]
- Mai, R.; Yang, B.; Chen, Y.; Yang, N.; He, Z.; Gao, S. A misalignment tolerant IPT system with intermediate coils for constant-current output. IEEE Trans. Power Electron. 2019, 34, 7151–7155. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, H.; Yu, H.; Wu, F.; Wheeler, P.; Zhou, Q.; Zhao, S. A misalignment-tolerant hybrid coupler for electric vehicle IPT charging systems. IEEE Trans. Vehhnol. 2023, 72, 12845–12856. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, B.; Kou, Z.; He, Z.; Cao, G.; Mai, R. Hybrid and reconfigurable IPT systems with high-misalignment tolerance for constant-current and constant-voltage battery charging. IEEE Trans. Power Electron. 2018, 33, 8259–8269. [Google Scholar] [CrossRef]
- Zhao, L.; Thrimawithana, D.J.; Madawala, U.K. Hybrid bidirectional wireless EV charging system tolerant to pad misalignment. IEEE Trans. Ind. Electron. 2017, 64, 7079–7086. [Google Scholar] [CrossRef]
- Pahlavan, S.; Ashtiani, S.J. Rotation-Tolerant Wireless Power Transmission Scheme with Smart Positioning for Cognitive Research on Moving Animals. IEEE Trans. Biomed. Circuits Syst. 2023, 18, 123–130. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | MPS | MPASA | MPPA | -Type Network |
|---|---|---|---|---|
| 1 | + | + | + | LC network |
| 2 | + | − | − | |
| 3 | − | + | − | |
| 4 | − | − | + | |
| 5 | + | − | − | CL network |
| 6 | + | + | − | |
| 7 | − | − | − | |
| 8 | − | + | + |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| LP | 31.3 μH | CP | 28.9 nF |
| LS | 28.3 μH | CS | 216.1 nF |
| LPA | 31.8 μH | CPA | 28.6 nF |
| LSA | 29.1 μH | CSA | 30.4 nF |
| LS1 | 3.72 μH | CS1 | 26.8 nF |
| Parameter | Ref. [25] | Ref. [24] | Ref. [21] | Ref. [22] | This Work |
|---|---|---|---|---|---|
| Coil structure | BP | DDQ | QDQP | BP | BP |
| Maximum Size (cm) | 39 × 73 | 40 × 40 | 40 × 40 | 40 × 40 | 30 × 30 |
| Misalignment Tolerance range | x-misalignment: +160 (20%) y-misalignment: N/A Z-misalignment: ±50 mm (16.6%) | X-Misalignment: ±200 mm (50%) Y-Misalignment: 50 mm (12%) Z-Misalignment: ±50 mm (33.33%) | X-Misalignment: +15 (37.5%) Y-Misalignment: ±15 (37.5%) X-Misalignment: ±3.5 (23.3%) | X-Misalignment: ±225 mm (50%) Y-Misalignment: ±60 mm (20%) Z-Misalignment: ±50 mm (33.33%) | X-Misalignment: ±100 mm (33.3%) Y-Misalignment: ±60 mm (20%) Z-Misalignment: ±50 mm (33.33%) |
| Output fluctuation | 10% | 5% | 5% | 5% | 5% |
| Output characteristic | CC | CC and CV | CV | CC | CC and CV |
| Increase the degree of freedom for coupler | NO | NO | NO | NO | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, K.; Dang, R.; Feng, X.; Wang, W. A New Magnetic Coupler with High Misalignment Tolerance and Inherent Constant Current–Constant Voltage for Underground Wireless Charging. Energies 2024, 17, 5130. https://doi.org/10.3390/en17205130
Yan K, Dang R, Feng X, Wang W. A New Magnetic Coupler with High Misalignment Tolerance and Inherent Constant Current–Constant Voltage for Underground Wireless Charging. Energies. 2024; 17(20):5130. https://doi.org/10.3390/en17205130
Chicago/Turabian StyleYan, Kai, Ruirong Dang, Xudong Feng, and Wenzhen Wang. 2024. "A New Magnetic Coupler with High Misalignment Tolerance and Inherent Constant Current–Constant Voltage for Underground Wireless Charging" Energies 17, no. 20: 5130. https://doi.org/10.3390/en17205130
APA StyleYan, K., Dang, R., Feng, X., & Wang, W. (2024). A New Magnetic Coupler with High Misalignment Tolerance and Inherent Constant Current–Constant Voltage for Underground Wireless Charging. Energies, 17(20), 5130. https://doi.org/10.3390/en17205130