
Mechanism and Data-Driven Fusion SOC Estimation

Abstract
1. Introduction
2. Mechanism SOC Estimation
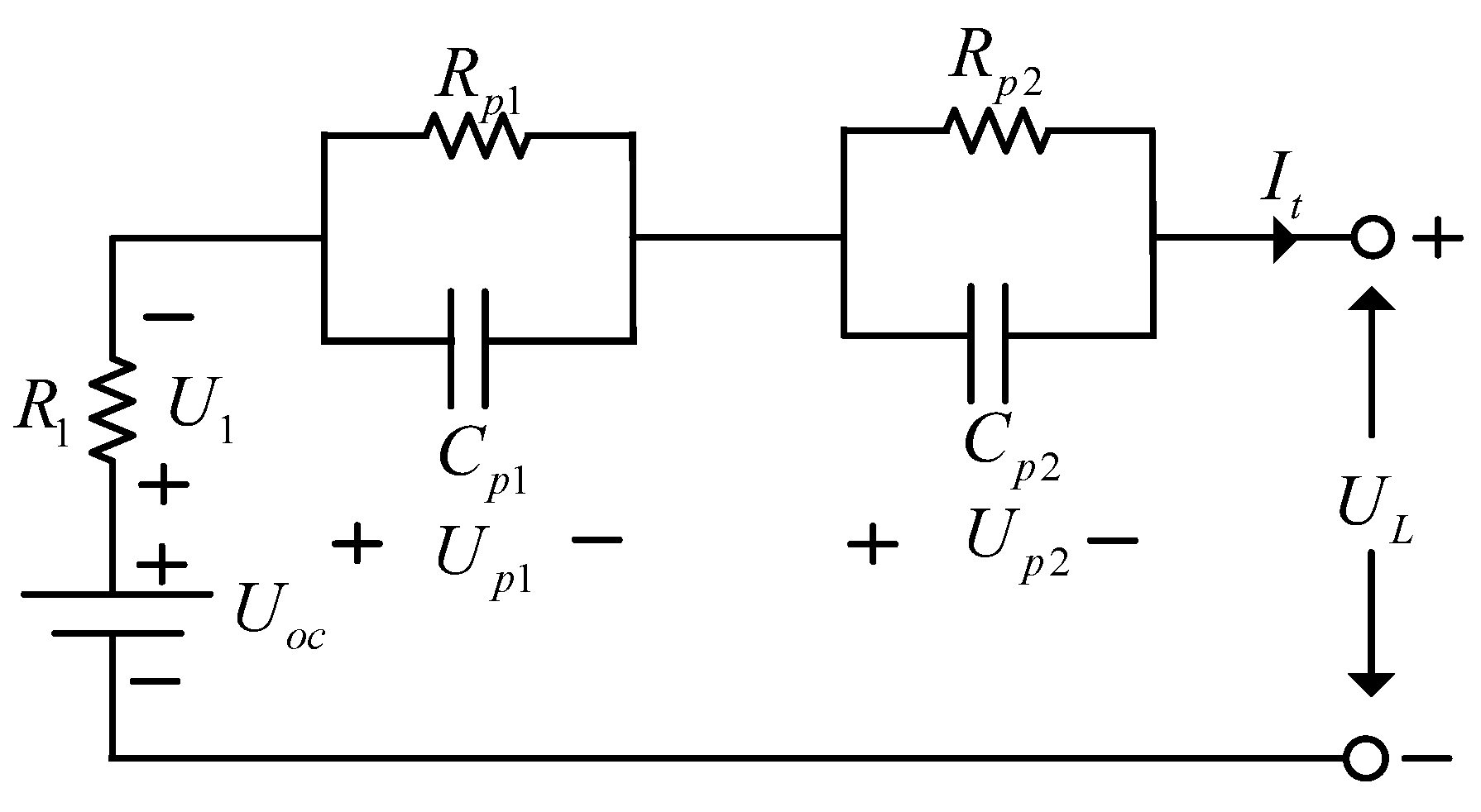
2.1. Battery Equivalent Circuit Model
2.2. Parameter Identification
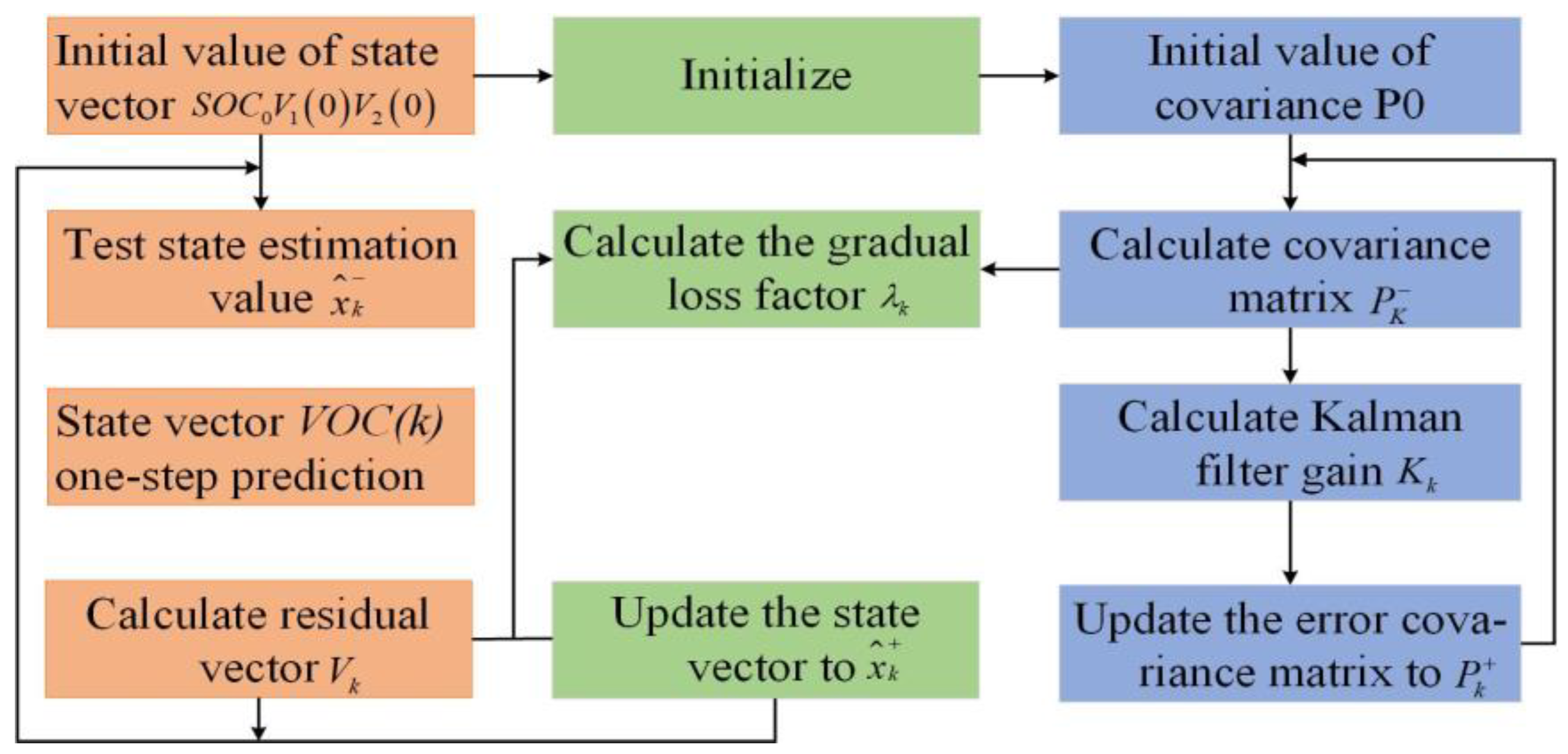
2.3. AFEKF Algorithm
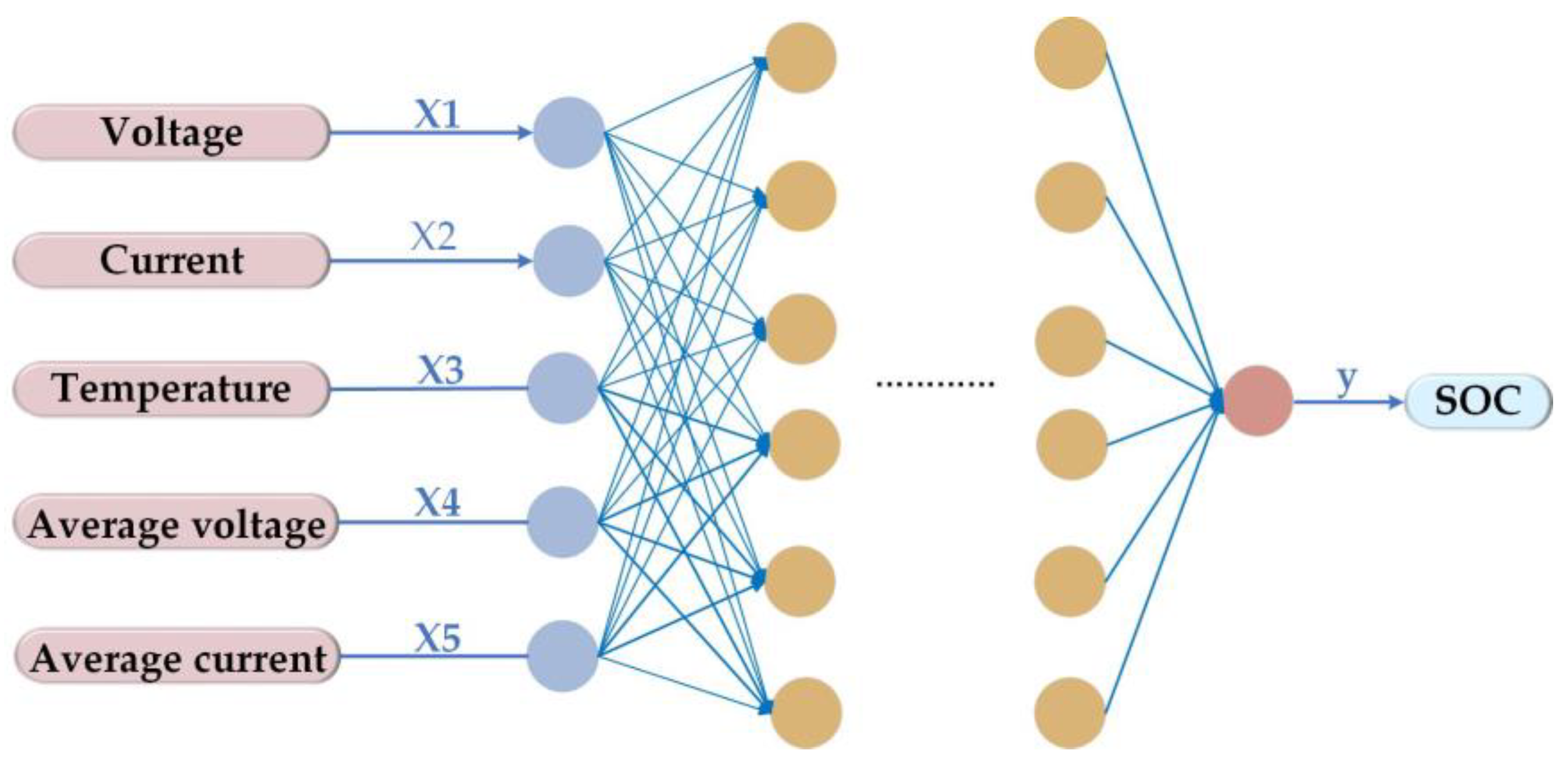
3. Data-Driven SOC Estimation
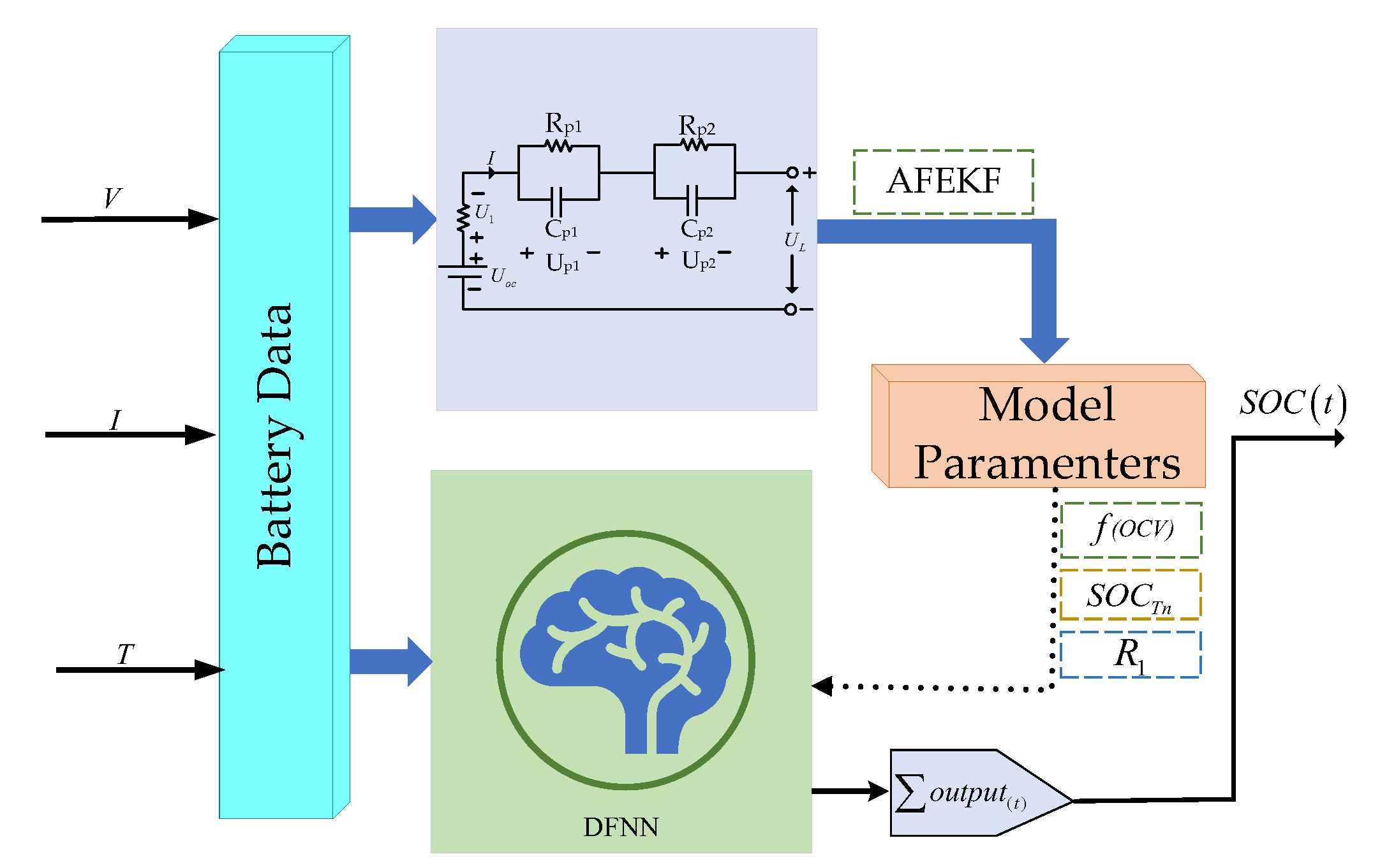
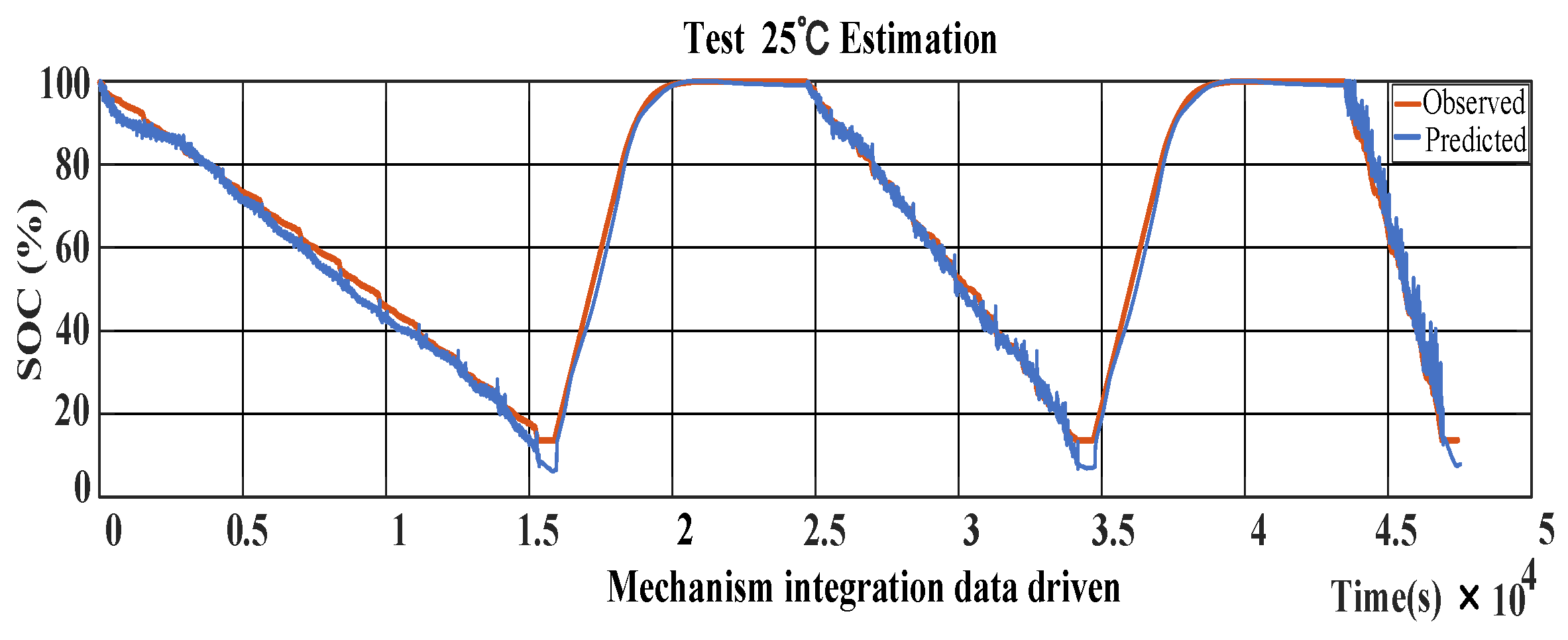
4. Mechanism- and Data-Driven Fusion SOC Estimation
4.1. Dataset Acquisition
4.2. Fusion Model SOC Estimation Methods
5. Simulation Analysis
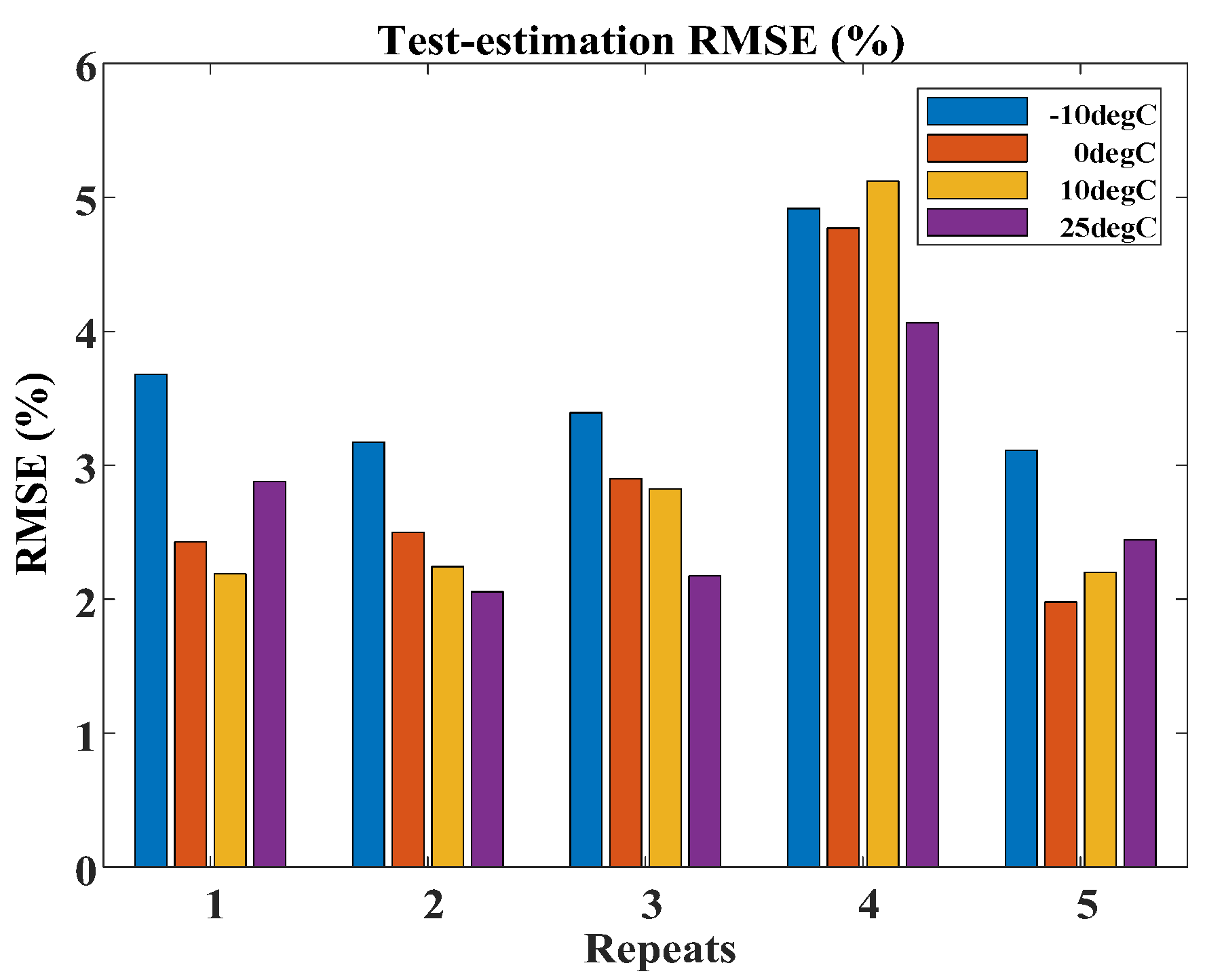
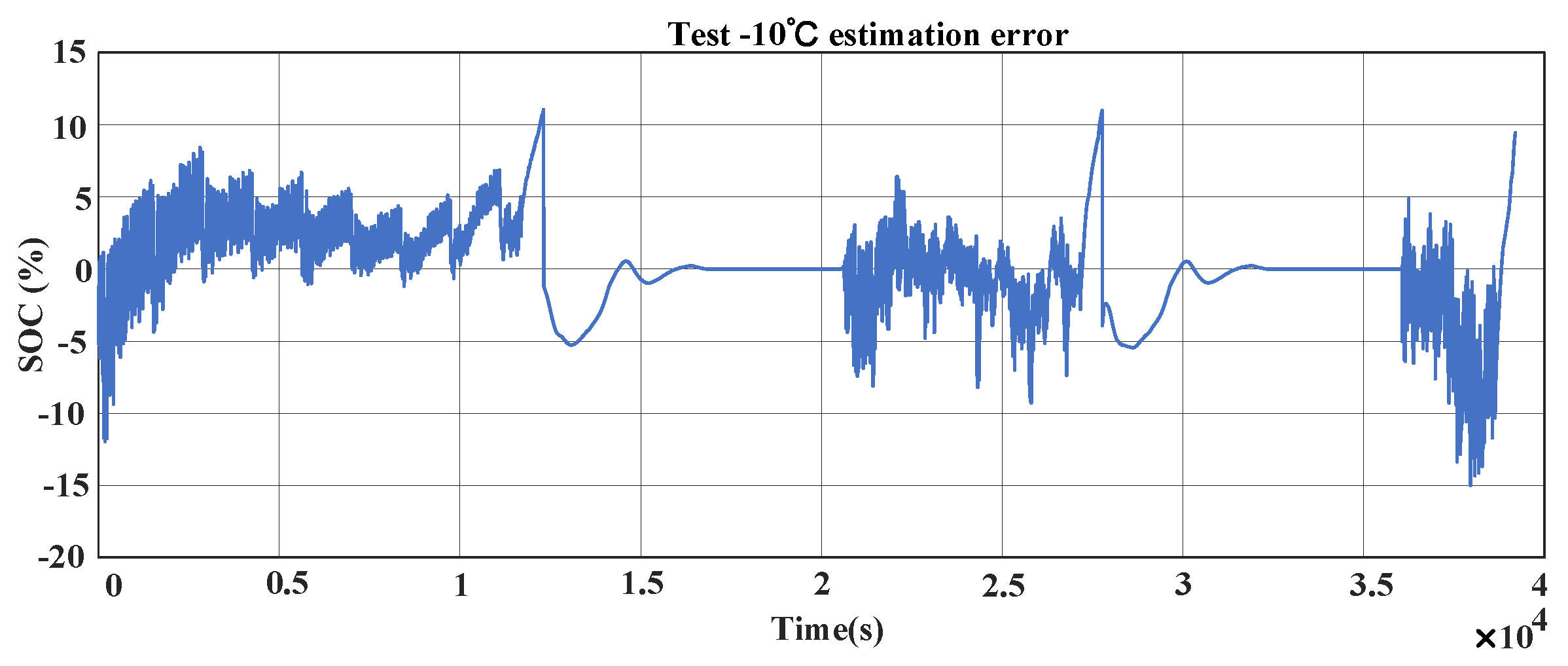
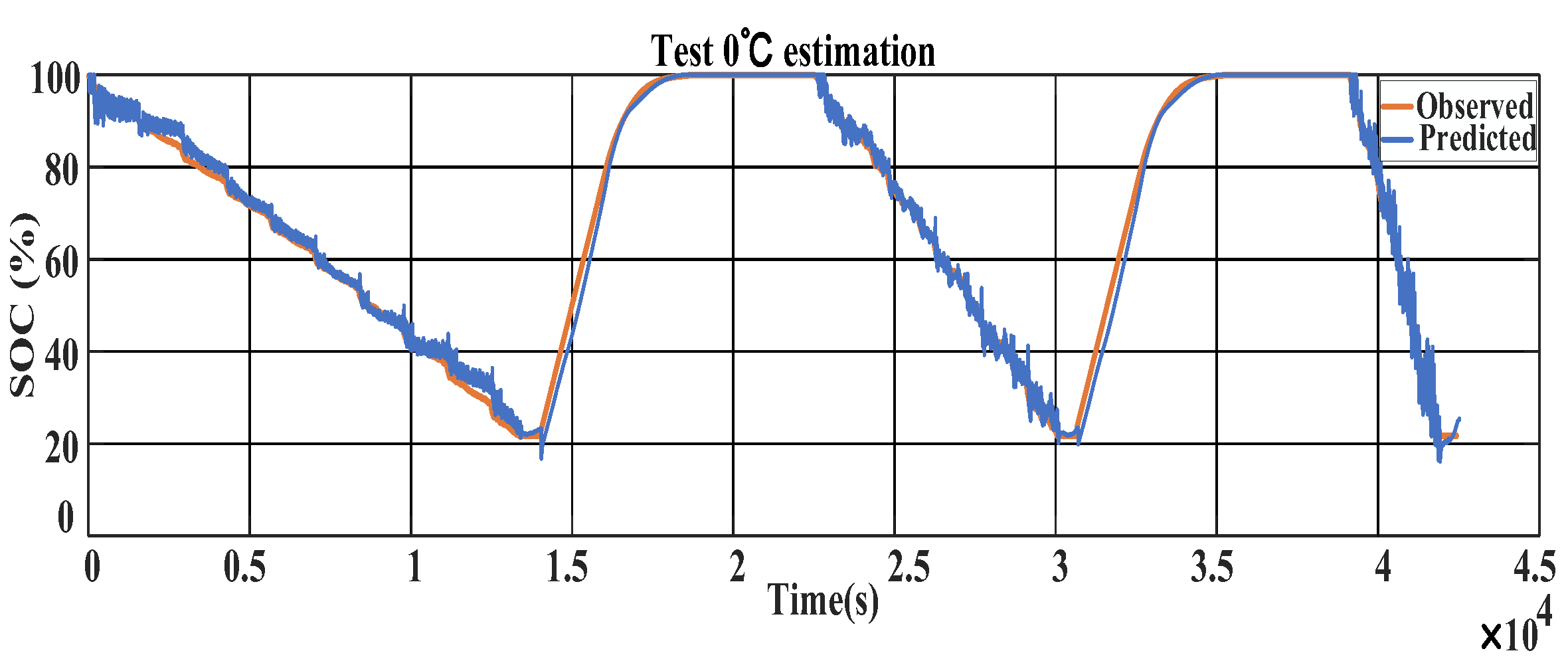
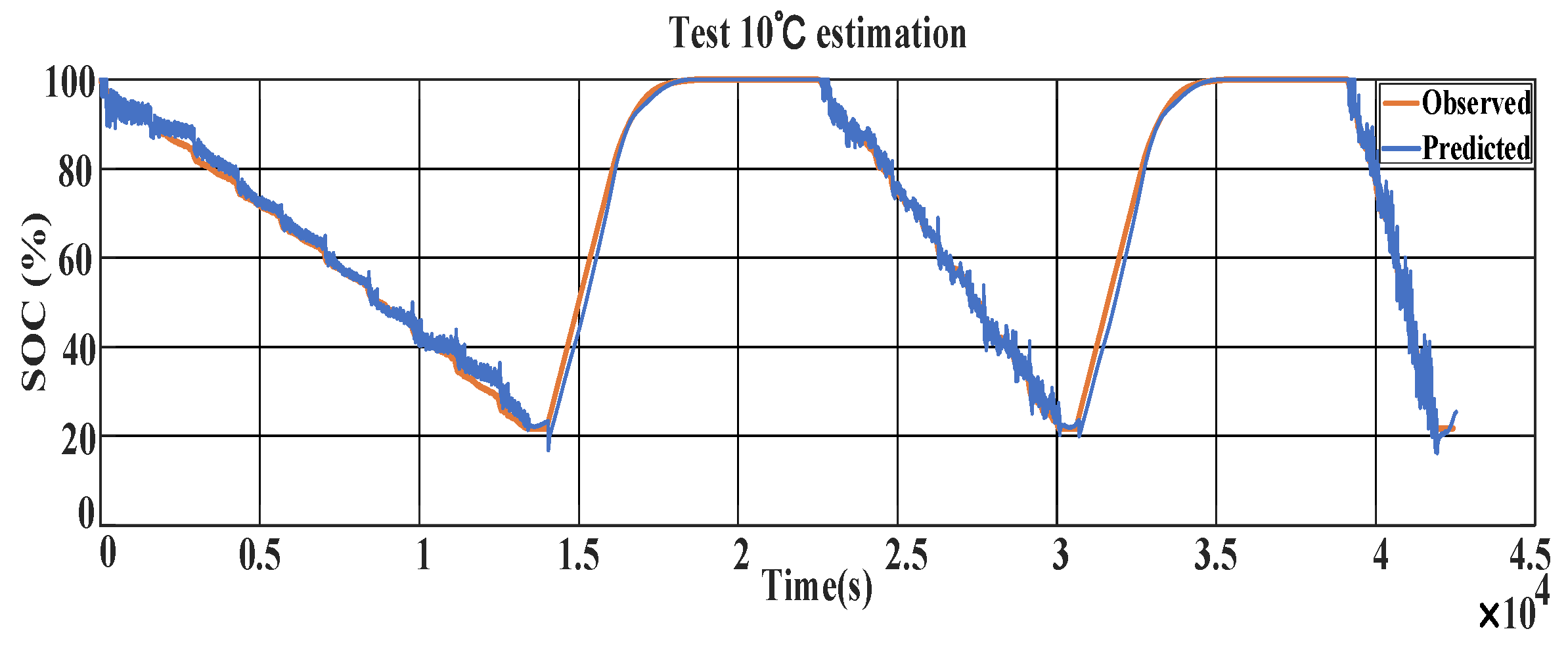
5.1. SOC Estimation at Different Temperatures
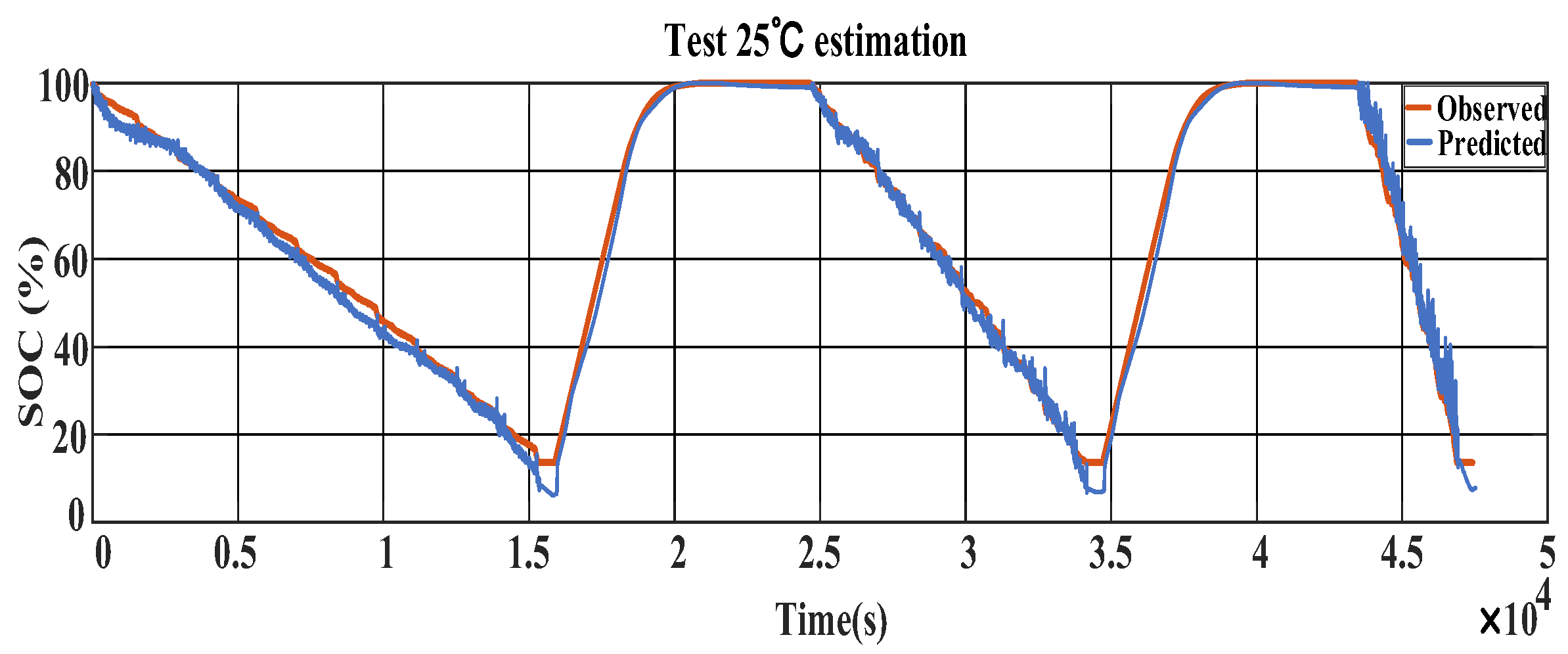
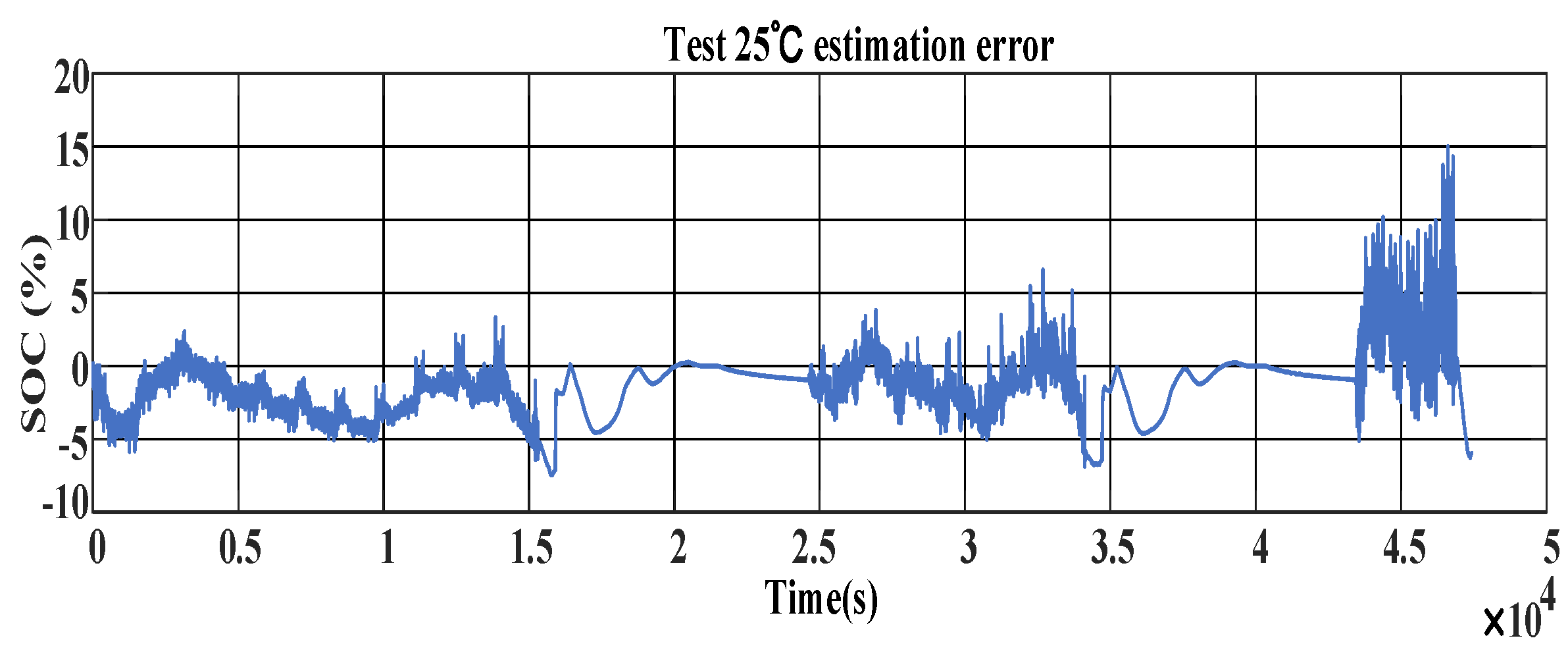
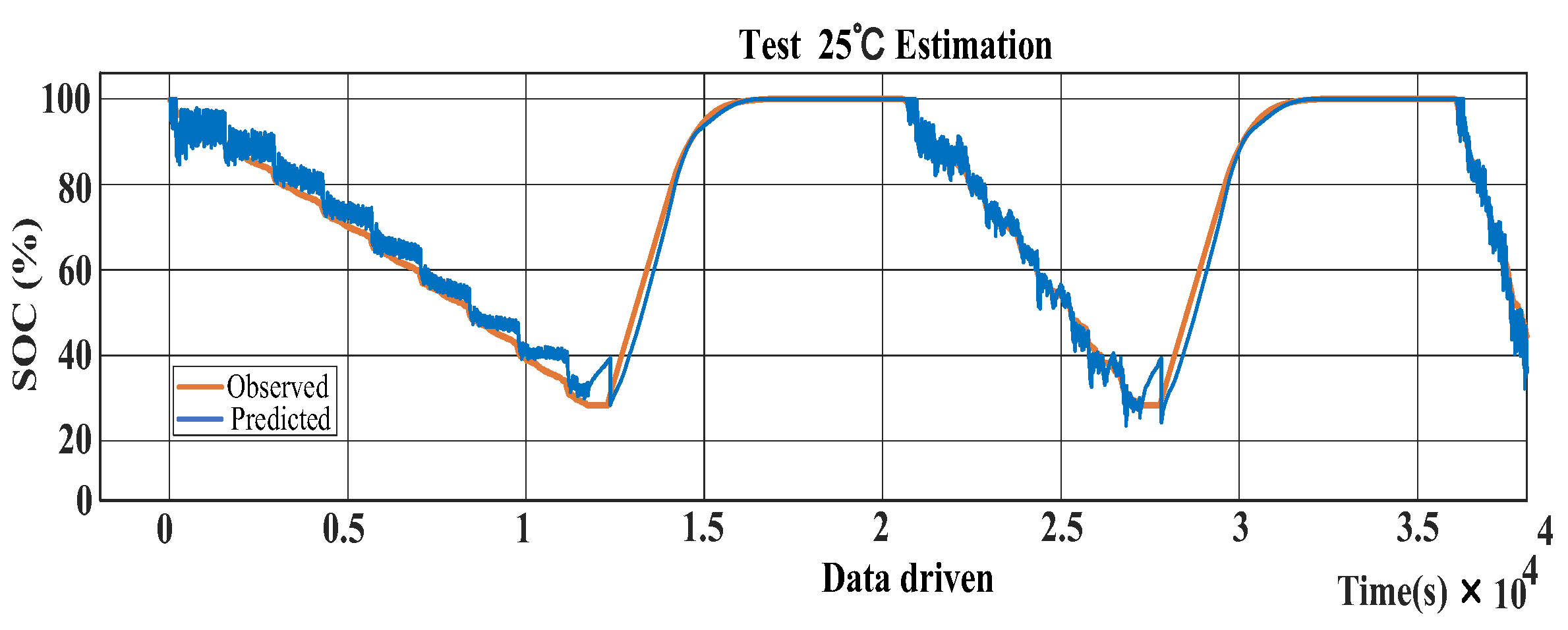
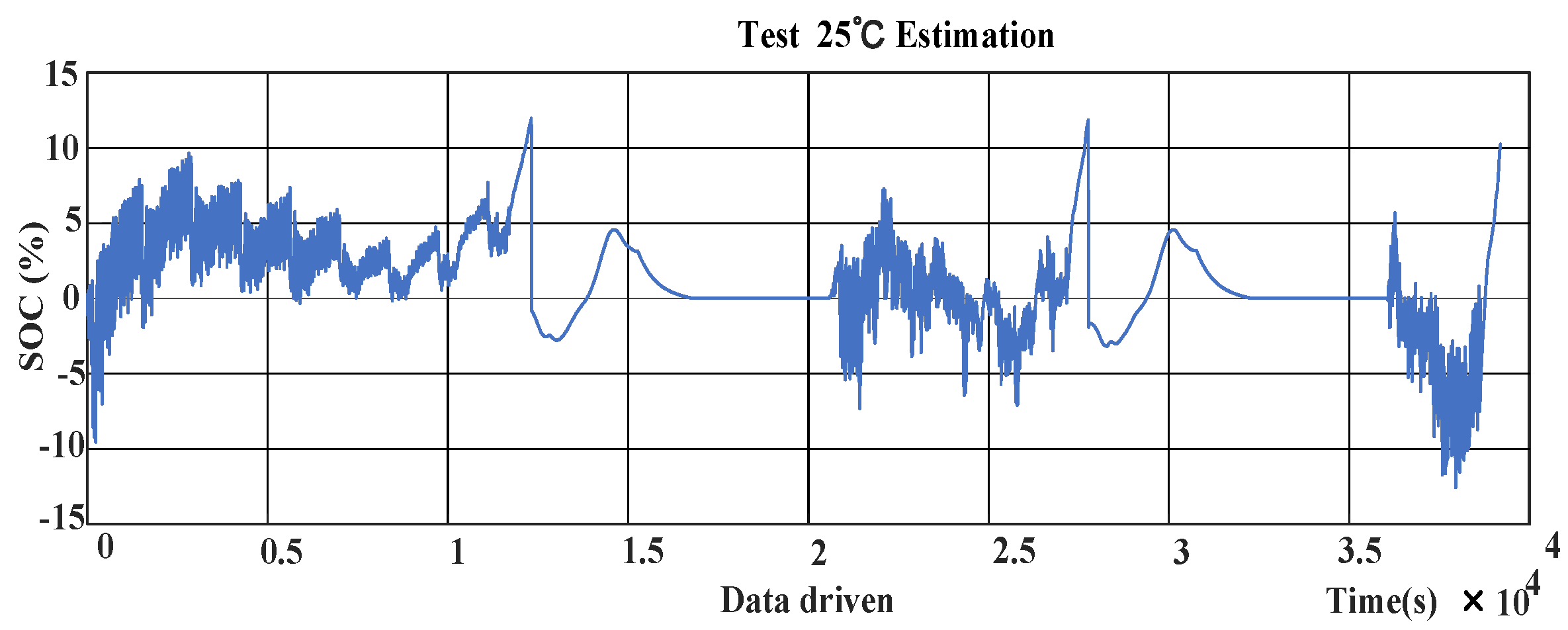
5.2. Comparison of SOC Estimation Results of Different Prediction Methods
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ali, M.U.; Zafar, A.; Nengroo, S.H.; Hussain, S.; Alvi, M.J.; Kim, H.J. Towards a smarter battery management system for electric vehicle applications: A critical review of lithium-ion battery state of charge estimation. Energies 2019, 12, 446. [Google Scholar] [CrossRef]
- Wu, L.X.; Lyu, Z.; Huang, Z.B.; Zhang, C.; Wei, C.Y. Physics-based battery SOC estimation methods: Recent advances and future perspectives. Energy Chem. 2024, 89, 27–40. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, J.W.; Wang, Z.K.; Jiang, Y.Q. Study of SOC Estimation by the Ampere-Hour Integral Method with Capacity Correction Based on LSTM. Batteries 2022, 8, 170. [Google Scholar] [CrossRef]
- Sundaresan, S.; Devabattini, B.; Kumar, P.; Balasingam, B.; Pattipati, K. Tabular open-circuit Voltage modeling of Li-ion Batteries for Robust SOC Estimation. Appl. Energy 2022, 15, 9142. [Google Scholar]
- Wang, L.; Sun, J.; Cai, Y.; Lian, Y.; Jin, M.; Zhao, X.; Wang, R.; Chen, L.; Chen, J. A novel OCV curve reconstruction and update method of lithium-ion batteries at different temperatures based on cloud data. Energy 2023, 268, 126773. [Google Scholar] [CrossRef]
- Yu, Q.Q.; Huang, Y.K.; Tang, A.H.; Wang, C.; Shen, W.X. OCV-SOC-Temperature Relationship Construction and State of Charge Estimation for a Series-Parallel Lithium-Ion Battery Pack. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6362–6371. [Google Scholar] [CrossRef]
- Demirci, O.; Taskin, S.; Schaltz, E.; Demirci, B.A. Review of battery state estimation methods for electric vehicles—Part I: SOC estimation. J. Energy Storage 2024, 87, 111435. [Google Scholar] [CrossRef]
- Qi, W.; Qin, W.H.; Yun, Z.H. Closed-loop state of charge estimation of Li-ion batteries based on deep learning and robust adaptive Kalman filter. Energy 2024, 307, 132805. [Google Scholar] [CrossRef]
- Yun, X.; Zhang, X.; Wang, C.; Fan, X.M. Online parameters identification and state of charge estimation for lithium-ion bat-teries based on improved central difference particle filter. J. Energy Storage 2023, 70, 107987. [Google Scholar] [CrossRef]
- Pang, H.; Chen, K.; Geng, Y.; Wu, L.; Wang, F.; Liu, J. Accurate capacity and remaining useful life prediction of lithium-ion batteries based on improved particle swarm optimization and particle filter. Energy 2024, 293, 130555. [Google Scholar] [CrossRef]
- Zhang, Q.; Wan, G.W.; Li, C.R.; Li, J.K.; Liu, X.R.; Li, M.H. State of charge estimation for Li-ion battery during dynamic driving process based on dual-channel deep learning methods and conditional judgement. Energy 2024, 294, 130948. [Google Scholar] [CrossRef]
- Tas, G.; Bal, C.; Uysal, A. Performance comparison of lithium polymer battery SOC estimation using GWO-BiLSTM and cutting-edge deep learning methods. Electr. Eng. 2023, 105, 3383–3397. [Google Scholar] [CrossRef]
- Pei, Z.W.; Liu, K.M.; Zhang, S.; Chen, X.F. Optimized EKF algorithm using TSO-BP neural network for lithium battery state of charge estimation. Energy Storage 2023, 73, 108882. [Google Scholar] [CrossRef]
- Li, Y.; Ye, M.; Wang, Q.; Lian, G.; Xia, B. An improved model combining machine learning and Kalman filtering architecture for state of charge estimation of lithium-ion batteries. Green Energy Intell. Transp. 2024, 3, 100163. [Google Scholar] [CrossRef]
- Khan, A.B.; Akram, A.S.; Choi, W. State of Charge Estimation of Flooded Lead Acid Battery Using Adaptive Unscented Kalman Filter. Energies 2024, 17, 1275. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, Y.P.; Yu, Y. Joint Estimation of SOC of Lithium Battery Based on Dual Kalman Filter. Process 2021, 9, 1412. [Google Scholar] [CrossRef]
- Song, D.D.; Gao, Z.; Chai, H.Y.; Jiao, Z.Y. An adaptive fractional-order extended Kalman filtering approach for estimating state of charge of lithium-ion batteries. Energy Storage 2024, 85, 111089. [Google Scholar] [CrossRef]
- Qin, P.L.; Zhao, L.H. A Novel Battery Model Considering the Battery Actual Reaction Mechanism for Model Parameters and SOC Joint Estimation. IEEE Trans. Ind. Electron. 2024, 71, 5496–5507. [Google Scholar] [CrossRef]
- Pillai, P.; Sundaresan, S.; Kumar, P.; Pattipati, K.; Balasingam, B. Open-Circuit Voltage Models for Battery Management Systems: A Review. Energies 2022, 15, 6803. [Google Scholar] [CrossRef]
- Li, C.; Kim, G.W. Improved State-of-Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Parameter Estimation and Multi-Innovation Adaptive Robust Unscented Kalman Filter. Energies 2024, 17, 272. [Google Scholar] [CrossRef]
- Zhang, X.S.; Liu, X.J.; Li, J.H. A Novel Method for Battery SOC Estimation Based on Slime Mould Algorithm Optimizing Neural Network under the Condition of Low Battery SOC Value. Electronics 2023, 12, 3924. [Google Scholar] [CrossRef]
- How, D.N.T.; Hannan, M.A.; Lipu, M.S.H.; Ker, P.J. State of Charge Estimation for Lithium-Ion Batteries Using Model-Based and Data-Driven Methods: A Review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Zhang, C.Z.; Zhao, H.Y.; Wang, L.Y.; Liao, C.L.; Wang, L.F. A comparative study on state-of-charge estimation for lithium-rich manganese-based battery based on Bayesian filtering and machine learning methods. Energy 2024, 306, 132349. [Google Scholar] [CrossRef]
- Zhou, W.; Zheng, Y.; Pan, Z.; Lu, Q. Review on the battery model and SOC estimation method. Processes 2021, 9, 1685. [Google Scholar] [CrossRef]
- Murawwat, S.; Gulzar, M.M.; Alzahrani, A.; Hafeez, G.; Khan, F.A.; Abed, A.M. State of charge estimation and error analysis of lithium-ion batteries for electric vehicles using Kalman filter and deep neural network. Energy Storage 2023, 72, 108039. [Google Scholar]
- Yang, D.; Wang, Y.; Pan, R.; Chen, R.; Chen, Z. State-of-health estimation for the lithium-ion battery based on support vector regression. Appl. Energy 2017, 227, 273–283. [Google Scholar] [CrossRef]
- Wu, M.; Qin, L.; Wu, G.; Huang, Y.; Shi, C. State of Charge Estimation of Power Lithium-ion Battery Based on a Variable Forgetting Factor Adaptive Kalman Filter. Energy Storage 2021, 41, 102841. [Google Scholar] [CrossRef]
- Lyu, C.; Li, J.F.; Zhang, L.L.; Wang, L.X.; Wang, D.F.; Pecht, M. State of charge estimation based on a thermal coupling simplified first-principles model for lithium-ion batteries. Energy Storage 2019, 25, 100838. [Google Scholar] [CrossRef]
- Lee, H.; Kim, Y.; Yang, S.Y.; Choi, H. Improved weight initialization for deep and narrow feedforward neural network. Neural Netw. 2024, 176, 106362. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | MAE | |
|---|---|---|
| Data-driven SOC estimation | 2.55% | 1.81% |
| Mechanism- and data-driven fusion SOC estimation | 1.65% | 1.16% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, A.; Xue, W.; Zhou, C.; Zhang, Y.; Dong, H. Mechanism and Data-Driven Fusion SOC Estimation. Energies 2024, 17, 4931. https://doi.org/10.3390/en17194931
Tian A, Xue W, Zhou C, Zhang Y, Dong H. Mechanism and Data-Driven Fusion SOC Estimation. Energies. 2024; 17(19):4931. https://doi.org/10.3390/en17194931
Chicago/Turabian StyleTian, Aijun, Weidong Xue, Chen Zhou, Yongquan Zhang, and Haiying Dong. 2024. "Mechanism and Data-Driven Fusion SOC Estimation" Energies 17, no. 19: 4931. https://doi.org/10.3390/en17194931
APA StyleTian, A., Xue, W., Zhou, C., Zhang, Y., & Dong, H. (2024). Mechanism and Data-Driven Fusion SOC Estimation. Energies, 17(19), 4931. https://doi.org/10.3390/en17194931