
A New Stochastic Controller for Efficient Power Extraction from Small-Scale Wind Energy Conversion Systems under Random Load Consumption

 ,
,  , , ,
, , ,  and
and 
Abstract
1. Introduction
1.1. Literature Review
1.2. Contribution
- This study introduces a unique fuzzy stochastic MPPT controller approach specifically designed for the efficient operation of a small-scale standalone WECS under varying and unpredictable loads. This novel approach addresses the gap in the current literature by accounting for the randomness in load variations.
- This approach eliminates the need for mechanical sensors by using only the DC rectifier input variables of the DC-DC boost converter. This sensorless operation simplifies the system, enhances reliability, and reduces maintenance requirements.
- The proposed controller guarantees the stochastic stability and recursive feasibility of the closed-loop system under unpredictable variations.
- The suggested TS fuzzy stochastic MPPT controller performs better than the conventional P&O algorithm. This indicates that the proposed approach is good at dealing with nonlinearity and random load consumption in WECS applications.
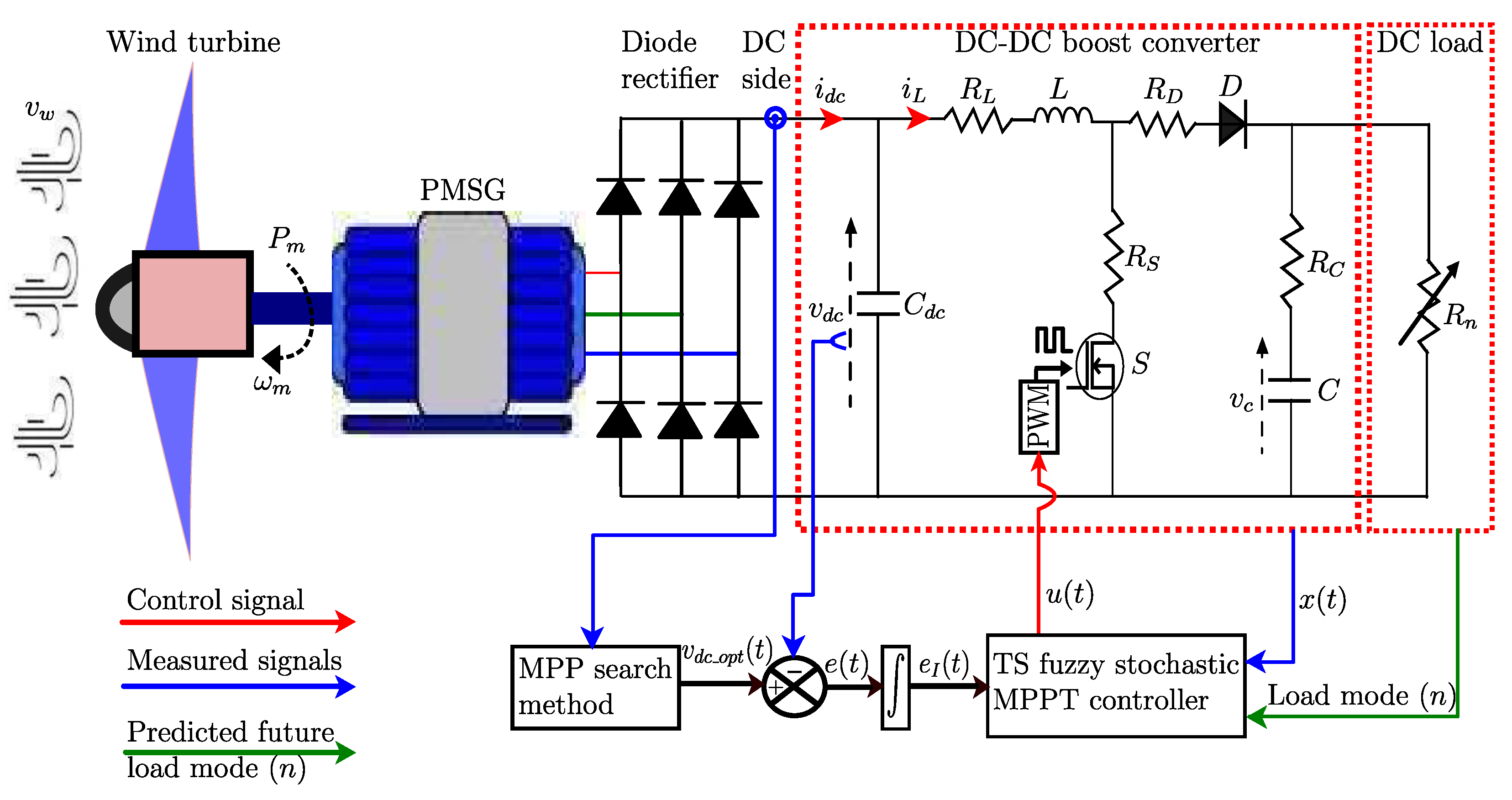
2. Wind Energy Conversion System Modeling
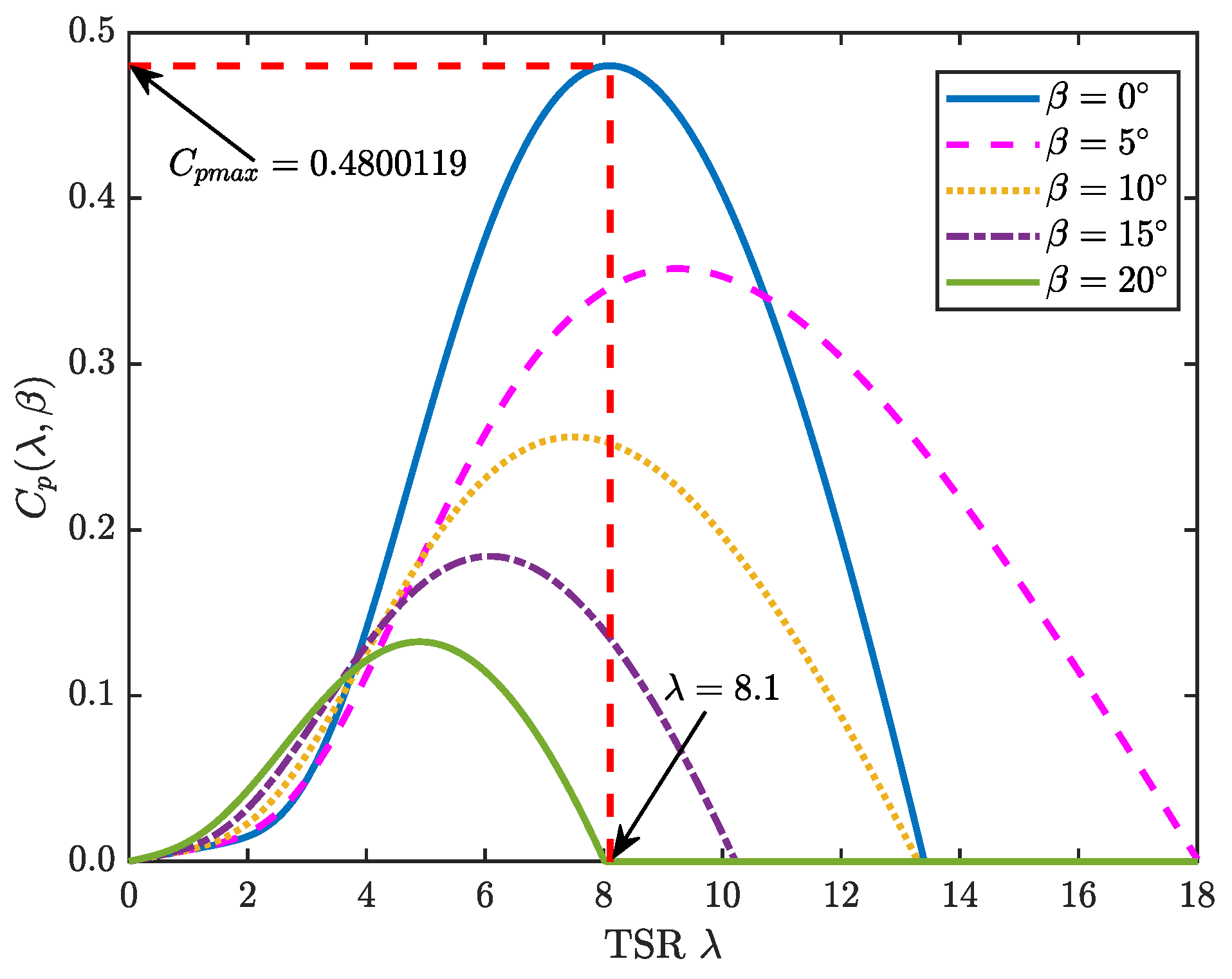
2.1. Wind Turbine Modeling
2.2. Permanent Magnet Synchronous Generator Connected to Diode Rectifier: Analysis and Modeling
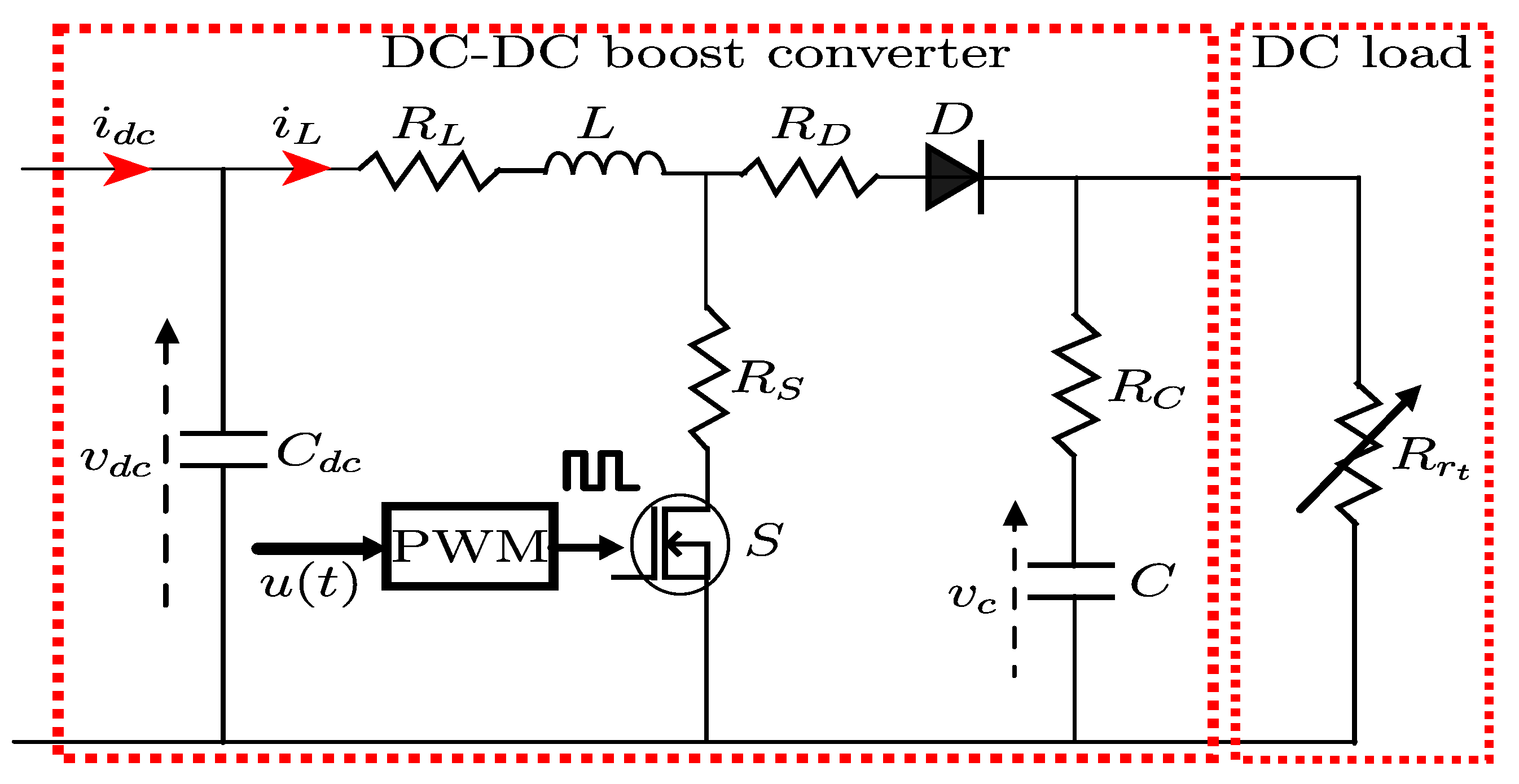
2.3. Modeling of DC-DC Boost Converter with Time-Varying Loads
3. Stochastic Load Consumption Using Markov Chain Model
3.1. Motivation: Stochastic Load
3.2. Markov Chain-Based System
| Algorithm 1 Markov chain-based load prediction for MPPT approach of WECS |
→ Define a finite set . → Initialize the initial Markov mode . → Define the transition rate matrix . → Define the transition probabilities as .
→ Update the Markov mode to predict the future load mode based on the present mode. → Adjust transition probabilities based on the predicted load consumption.
→ Apply the predicted load value to the MPPT block.
→ Continuously predict the future load mode and update the probabilities. |
4. TS Fuzzy Stochastic MPPT Controller
4.1. TS Fuzzy Modeling
- Model rule i: IF is and … and is , THENwhere … are the fuzzy sets, is the number of fuzzy rules, and p is the number of premise variables.
4.2. Maximum Power Point Search Method
4.3. Controller Design
- Model rule j: IF is and … and is , THENwhere are controller gains.
4.4. Stability Analysis
4.5. Recursive Feasibility
5. Simulation Results
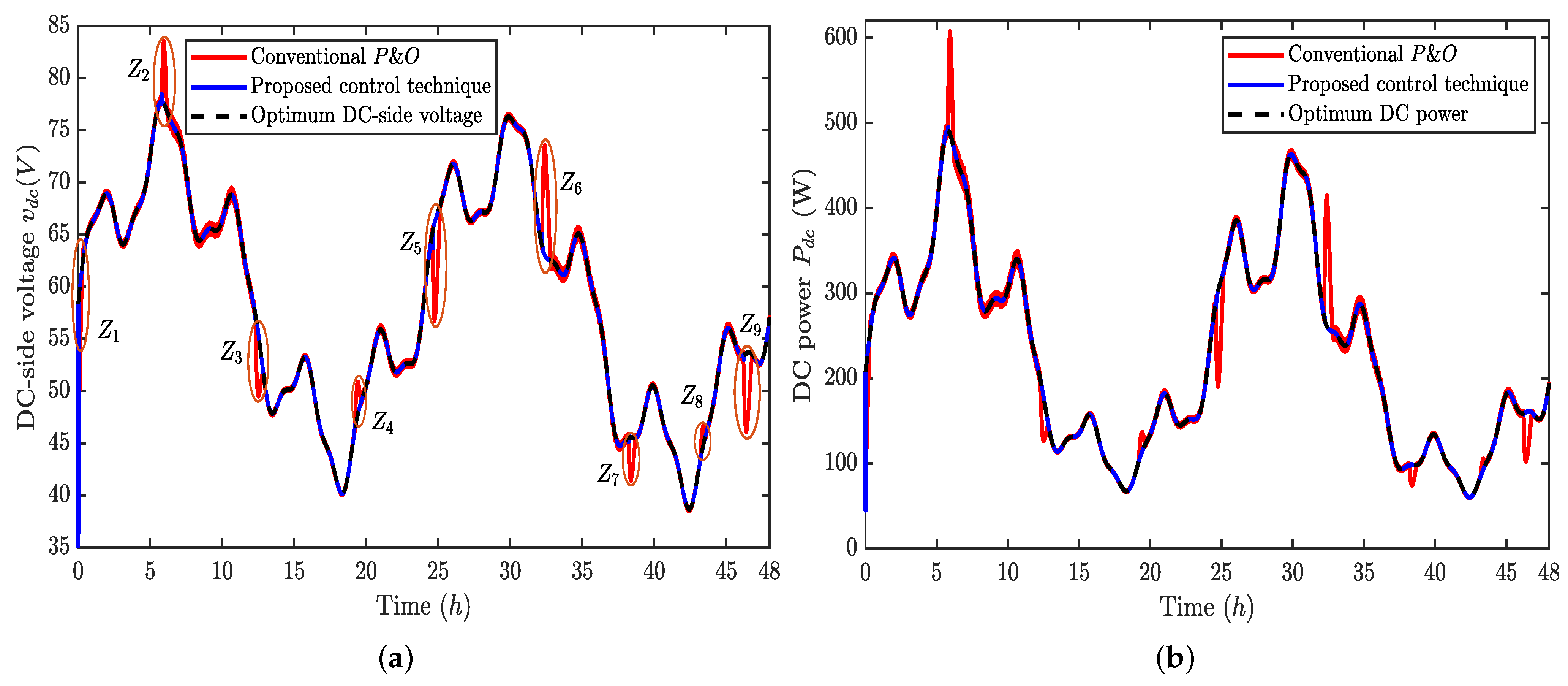
5.1. Impact of Random Load and Wind Speed Variations on Control Performance
5.2. Tracking Efficiency
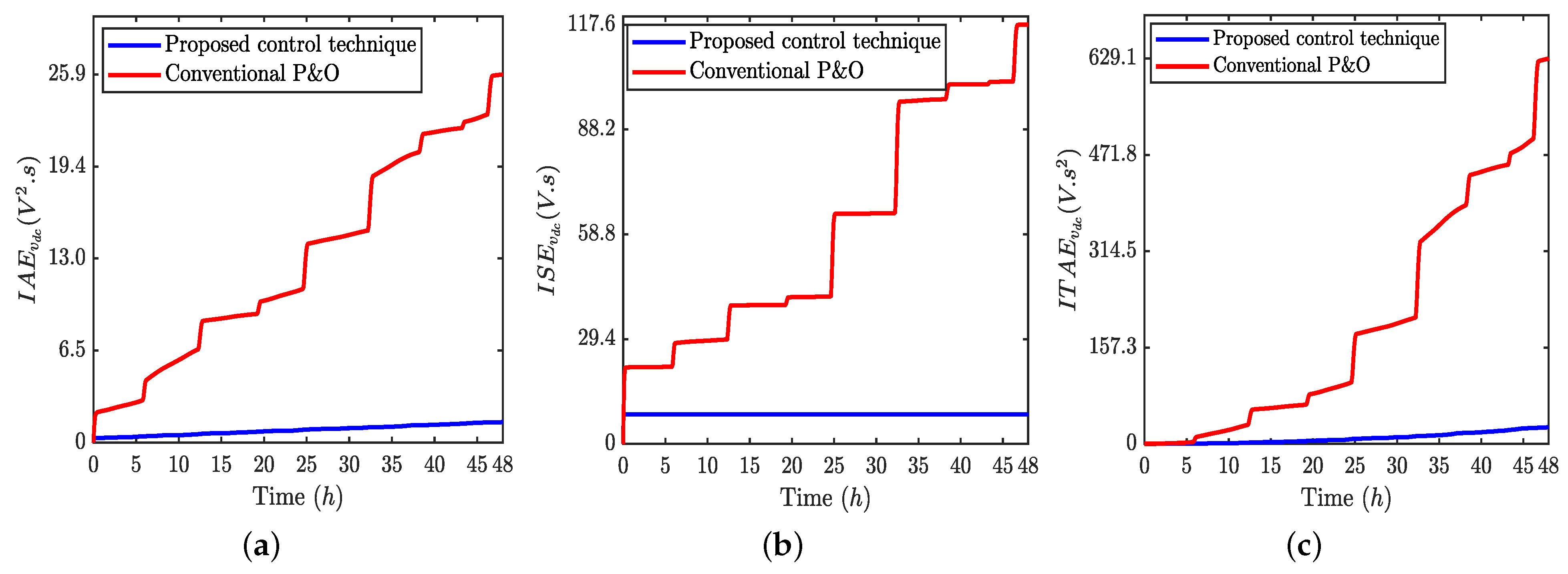
5.3. Performance Indices
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| WECS | Wind energy conversion system |
| PMSG | Permanent magnet synchronous generator |
| DC | Direct current |
| MPPT | Maximum power point tracking |
| MPP | Maximum power point |
| IPCs | Indirect power controllers |
| DPCs | Direct power controllers |
| TSR | Tip-speed ratio |
| OTC | Optimal torque control |
| PSF | Power signal feedback |
| P&O | Perturb and observe |
| INC | Incremental conductance |
| ORB | Optimum-relation-based |
| PSO | Particle swarm optimization |
| ISMC | Integral sliding-mode control |
| FTSMC | Fast terminal sliding-mode control |
| DITSMC | discrete integral terminal sliding-mode control |
| TS | Takagi–Sugeno |
| LMI | Linear matrix inequality |
| PDC | Parallel distributed compensation |
| IAE | Integral Absolute Error |
| ISE | Integral Squared Error |
| ITAE | Integral Time Absolute Error |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Turbine Parameters | PMSG Parameters | DC-DC Boost Converter Parameters |
|---|---|---|
| [Kg/m3] | [mH], 0.01 | |
| [m] | [H] | F] |
| [Wb] | F], 0.478 [ | |
| [Kgm2] |
Appendix B
References
- Savino, M.M.; Manzini, R.; Della Selva, V.; Accorsi, R. A new model for environmental and economic evaluation of renewable energy systems: The case of wind turbines. Appl. Energy 2017, 189, 739–752. [Google Scholar] [CrossRef]
- Tripathi, S.M.; Tiwari, A.N.; Singh, D. Grid-integrated permanent magnet synchronous generator based wind energy conversion systems: A technology review. Renew. Sustain. Energy Rev. 2015, 51, 1288–1305. [Google Scholar] [CrossRef]
- Mendi, B.; Pattnaik, M.; Srungavarapu, G. A single current sensor based adaptive step size MPPT control of a small scale variable speed wind energy conversion system. Appl. Energy 2024, 357, 122492. [Google Scholar] [CrossRef]
- Barzegar-Kalashani, M.; Seyedmahmoudian, M.; Mekhilef, S.; Stojcevski, A.; Horan, B. Small-scale wind turbine control in high-speed wind conditions: A review. Sustain. Energy Technol. Assess. 2023, 60, 103577. [Google Scholar] [CrossRef]
- Daili, Y.; Gaubert, J.P.; Rahmani, L.; Harrag, A. Quantitative Feedback Theory design of robust MPPT controller for Small Wind Energy Conversion Systems: Design, analysis and experimental Study. Sustain. Energy Technol. Assess. 2019, 35, 308–320. [Google Scholar] [CrossRef]
- Boudjemai, H.; Ardjoun, S.A.E.M.; Chafouk, H.; Denai, M.; Elbarbary, Z.M.S.; Omar, A.I.; Mahmoud, M.M. Application of a Novel Synergetic Control for Optimal Power Extraction of a Small-Scale Wind Generation System with Variable Loads and Wind Speeds. Symmetry 2023, 15, 369. [Google Scholar] [CrossRef]
- Urtasun, A.; Sanchis, P.; San Martín, I.; López, J.; Marroyo, L. Modeling of small wind turbines based on PMSG with diode bridge for sensorless maximum power tracking. Renew. Energy 2013, 55, 138–149. [Google Scholar] [CrossRef]
- Daili, Y.; Gaubert, J.P.; Rahmani, L. Implementation of a new maximum power point tracking control strategy for small wind energy conversion systems without mechanical sensors. Energy Convers. Manag. 2015, 97, 298–306. [Google Scholar] [CrossRef]
- Ajami, A.; Alizadeh, R.; Elmi, M. Design and control of a grid tied 6-switch converter for two independent low power wind energy resources based on PMSGs with MPPT capability. Renew. Energy 2016, 87, 532–543. [Google Scholar] [CrossRef]
- Martínez-Nolasco, J.; Sámano-Ortega, V.; Botello-Álvarez, J.; Padilla-Medina, J.; Martínez-Nolasco, C.; Bravo-Sánchez, M. Development of a Hardware-in-the-Loop Platform for the Validation of a Small-Scale Wind System Control Strategy. Energies 2023, 16, 7813. [Google Scholar] [CrossRef]
- Dursun, E.H.; Kulaksiz, A.A. Second-order sliding mode voltage-regulator for improving MPPT efficiency of PMSG-based WECS. Int. J. Electr. Power Energy Syst. 2020, 121, 106149. [Google Scholar] [CrossRef]
- Gouabi, H.; Hazzab, A.; Habbab, M.; Rezkallah, M.; Chandra, A.; Ibrahim, H. Fuzzy adaptive dP-perturb and observe maximum power point tracking controller for wind energy conversion systems: Design and real-time implementation. Sustain. Energy Grids Netw. 2023, 36, 101230. [Google Scholar] [CrossRef]
- Dalala, Z.M.; Zahid, Z.U.; Yu, W.; Cho, Y.; Lai, J.S. Design and Analysis of an MPPT Technique for Small-Scale Wind Energy Conversion Systems. IEEE Trans. Energy Convers. 2013, 28, 756–767. [Google Scholar] [CrossRef]
- Chen, J.; Lin, T.; Wen, C.; Song, Y. Design of a Unified Power Controller for Variable-Speed Fixed-Pitch Wind Energy Conversion System. IEEE Trans. Ind. Electron. 2016, 63, 4899–4908. [Google Scholar] [CrossRef]
- Kumar, R.; Agrawal, H.P.; Shah, A.; Bansal, H.O. Maximum power point tracking in wind energy conversion system using radial basis function based neural network control strategy. Sustain. Energy Technol. Assessments 2019, 36, 100533. [Google Scholar] [CrossRef]
- Kumar, D.; Chatterjee, K. A review of conventional and advanced MPPT algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Mousa, H.H.; Youssef, A.R.; Mohamed, E.E. State of the art perturb and observe MPPT algorithms based wind energy conversion systems: A technology review. Int. J. Electr. Power Energy Syst. 2021, 126, 106598. [Google Scholar] [CrossRef]
- Nasiri, M.; Milimonfared, J.; Fathi, S. Modeling, analysis and comparison of TSR and OTC methods for MPPT and power smoothing in permanent magnet synchronous generator-based wind turbines. Energy Convers. Manag. 2014, 86, 892–900. [Google Scholar] [CrossRef]
- Pagnini, L.C.; Burlando, M.; Repetto, M.P. Experimental power curve of small-size wind turbines in turbulent urban environment. Appl. Energy 2015, 154, 112–121. [Google Scholar] [CrossRef]
- Pande, J.; Nasikkar, P.; Kotecha, K.; Varadarajan, V. A Review of Maximum Power Point Tracking Algorithms for Wind Energy Conversion Systems. J. Mar. Sci. Eng. 2021, 9, 1187. [Google Scholar] [CrossRef]
- Balbino, A.J.; Nora, B.d.S.; Lazzarin, T.B. An Improved Mechanical Sensorless Maximum Power Point Tracking Method for Permanent-Magnet Synchronous Generator-Based Small Wind Turbines Systems. IEEE Trans. Ind. Electron. 2022, 69, 4765–4775. [Google Scholar] [CrossRef]
- Zhang, H.B.; Fletcher, J.; Greeves, N.; Finney, S.; Williams, B. One-power-point operation for variable speed wind/tidal stream turbines with synchronous generators. IET Renew. Power Gener. 2011, 5, 99–108. [Google Scholar] [CrossRef]
- Kesraoui, M.; Korichi, N.; Belkadi, A. Maximum power point tracker of wind energy conversion system. Renew. Energy 2011, 36, 2655–2662. [Google Scholar] [CrossRef]
- Xia, Y.; Ahmed, K.H.; Williams, B.W. Wind Turbine Power Coefficient Analysis of a New Maximum Power Point Tracking Technique. IEEE Trans. Ind. Electron. 2012, 60, 1122–1132. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Al-Hadhrami, T.; Tan, C.W.; Yatim, A.H. Towards Green Energy for Smart Cities: Particle Swarm Optimization Based MPPT Approach. IEEE Access 2018, 6, 58427–58438. [Google Scholar] [CrossRef]
- Şerban, I.; Marinescu, C. A sensorless control method for variable-speed small wind turbines. Renew. Energy 2012, 43, 256–266. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel high efficient speed sensorless controller for maximum power extraction from wind energy conversion systems. Energy Convers. Manag. 2016, 123, 392–401. [Google Scholar] [CrossRef]
- Dursun, E.H.; Koyuncu, H.; Kulaksiz, A.A. A novel unified maximum power extraction framework for PMSG based WECS using chaotic particle swarm optimization derivatives. Eng. Sci. Technol. Int. J. 2021, 24, 158–170. [Google Scholar] [CrossRef]
- Yin, X.X.; Lin, Y.G.; Li, W.; Gu, Y.J.; Lei, P.F.; Liu, H.W. Sliding mode voltage control strategy for capturing maximum wind energy based on fuzzy logic control. Int. J. Electr. Power Energy Syst. 2015, 70, 45–51. [Google Scholar] [CrossRef]
- Yin, X.X.; Lin, Y.G.; Li, W.; Gu, Y.J.; Liu, H.W.; Lei, P.F. A novel fuzzy integral sliding mode current control strategy for maximizing wind power extraction and eliminating voltage harmonics. Energy 2015, 85, 677–686. [Google Scholar] [CrossRef]
- Yazıcı, İ.; Yaylacı, E.K. Discrete-time integral terminal sliding mode based maximum power point controller for the PMSG-based wind energy system. IET Power Electron. 2019, 12, 3688–3696. [Google Scholar] [CrossRef]
- Luo, Z.; Li, X.; Jiang, C.; Li, Z.; Long, T. Permeability-Adjustable Nanocrystalline Flake Ribbon in Customized High-Frequency Magnetic Components. IEEE Trans. Power Electron. 2024, 39, 3477–3485. [Google Scholar] [CrossRef]
- Tanaka, K.; Wang, H.O. Takagi-Sugeno Fuzzy Model and Parallel Distributed Compensation. In Fuzzy Control Systems Design and Analysis; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2001; Chapter 2; pp. 5–48. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy Control Systems: Past, Present and Future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [Google Scholar] [CrossRef]
- López-Flores, D.R.; Márquez-Gutierrez, P.R.; Baray-Arana, R.E.; Ramirez-Alonso, G. Efficient and Fast Wind Turbine MPPT Algorithm Using TS Fuzzy Logic and Optimal Relation Methods. IEEE Lat. Am. Trans. 2024, 22, 612–619. [Google Scholar] [CrossRef]
- Kharrat, M.; Abderrahim, S.; Allouche, M. Robust H2-Optimal TS Fuzzy Controller Design for a Wind Energy Conversion System. Adv. Mater. Sci. Eng. 2022, 2022, 5428109. [Google Scholar] [CrossRef]
- Liu, P.; Yang, W.T.; Yang, C.E.; Hsu, C.L. Sensorless wind energy conversion system maximum power point tracking using Takagi–Sugeno fuzzy cerebellar model articulation control. Appl. Soft Comput. 2015, 29, 450–460. [Google Scholar] [CrossRef]
- Abderrahim, S.; Allouche, M.; Chaabane, M. Intelligent power control of wind conversion system based on Takagi–Sugeno fuzzy model. Int. J. Circuit Theory Appl. 2023, 51, 2247–2265. [Google Scholar] [CrossRef]
- Iqteit, N.A.; Arsoy, A.B.; Çakır, B. The random varying loads and their impacts on the performance of smart grids. Electr. Power Syst. Res. 2022, 209, 107960. [Google Scholar] [CrossRef]
- Aatabe, M.; Abbadi, R.E.; Vargas, A.N.; Bouzid, A.E.M.; Bawayan, H.; Mosaad, M.I. Stochastic Energy Management Strategy for Autonomous PV–Microgrid Under Unpredictable Load Consumption. IEEE Access 2024, 12, 84401–84419. [Google Scholar] [CrossRef]
- Ramezani, M.; Li, S.; Sun, Y. DQ-reference-frame based impedance and power control design of islanded parallel voltage source converters for integration of distributed energy resources. Electr. Power Syst. Res. 2019, 168, 67–80. [Google Scholar] [CrossRef]
- Paul, S.; Chang, J. Model-based design of variable speed non-salient pole permanent magnet synchronous generator for urban water pipeline energy harvester. Int. J. Electr. Power Energy Syst. 2021, 125, 106402. [Google Scholar] [CrossRef]
- Siddhartha, V.; Hote, Y.V. Systematic circuit design and analysis of a non-ideal DC–DC pulse width modulation boost converter. IET Circuits Devices Syst. 2018, 12, 144–156. [Google Scholar] [CrossRef]
- Aatabe, M.; El Guezar, F.; Vargas, A.N.; Bouzahir, H. A novel stochastic maximum power point tracking control for off-grid standalone photovoltaic systems with unpredictable load demand. Energy 2021, 235, 121272. [Google Scholar] [CrossRef]
- Giaouris, D.; Papadopoulos, A.I.; Patsios, C.; Walker, S.; Ziogou, C.; Taylor, P.; Voutetakis, S.; Papadopoulou, S.; Seferlis, P. A systems approach for management of microgrids considering multiple energy carriers, stochastic loads, forecasting and demand side response. Appl. Energy 2018, 226, 546–559. [Google Scholar] [CrossRef]
- Zhai, S.; Sun, Y.; Cui, H.; Hu, Y.; Li, Z. Adjustable loads control and stochastic stability analysis for multi-energy generation system based on Markov model. Neural Comput. Appl. 2020, 32, 1517–1529. [Google Scholar] [CrossRef]
- Aatabe, M.; El Guezar, F.; Bouzahir, H.; Vargas, A.N. Constrained stochastic control of positive Takagi-Sugeno fuzzy systems with Markov jumps and its application to a DC-DC boost converter. Trans. Inst. Meas. Control 2020, 42, 3234–3242. [Google Scholar] [CrossRef]
- Vargas, A.N.; Sampaio, L.P.; Acho, L.; Zhang, L.; do Val, J.B.R. Optimal Control of DC-DC Buck Converter via Linear Systems With Inaccessible Markovian Jumping Modes. IEEE Trans. Control Syst. Technol. 2016, 24, 1820–1827. [Google Scholar] [CrossRef]
- Costa, O.L.; Fragoso, M.D.; Todorov, M.G. Continuous-Time Markov Jump Linear Systems; Probability and Its Applications; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Cui, D.; Wang, Y.; Su, H.; Xu, Z.; Que, H. Fuzzy-model-based tracking control of Markov jump nonlinear systems with incomplete mode information. J. Frankl. Inst. 2021, 358, 3633–3650. [Google Scholar] [CrossRef]








| ith Rule | Membership Grade | Value of | ||||
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| Modes | ||||||||
| 35 | 27 | 30 | 38 | 62 | 33 | 50 | 55 |
| Controller | Proposed | Conventional P&O |
|---|---|---|
| Average MPPT efficiency | 99.93% | 97.60% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tighirt, A.; Aatabe, M.; El Guezar, F.; Bouzahir, H.; Vargas, A.N.; Neretti, G. A New Stochastic Controller for Efficient Power Extraction from Small-Scale Wind Energy Conversion Systems under Random Load Consumption. Energies 2024, 17, 4927. https://doi.org/10.3390/en17194927
Tighirt A, Aatabe M, El Guezar F, Bouzahir H, Vargas AN, Neretti G. A New Stochastic Controller for Efficient Power Extraction from Small-Scale Wind Energy Conversion Systems under Random Load Consumption. Energies. 2024; 17(19):4927. https://doi.org/10.3390/en17194927
Chicago/Turabian StyleTighirt, Abdelhakim, Mohamed Aatabe, Fatima El Guezar, Hassane Bouzahir, Alessandro N. Vargas, and Gabriele Neretti. 2024. "A New Stochastic Controller for Efficient Power Extraction from Small-Scale Wind Energy Conversion Systems under Random Load Consumption" Energies 17, no. 19: 4927. https://doi.org/10.3390/en17194927
APA StyleTighirt, A., Aatabe, M., El Guezar, F., Bouzahir, H., Vargas, A. N., & Neretti, G. (2024). A New Stochastic Controller for Efficient Power Extraction from Small-Scale Wind Energy Conversion Systems under Random Load Consumption. Energies, 17(19), 4927. https://doi.org/10.3390/en17194927