1. Introduction
Ensuring the stable operation of the power system is a crucial task for power transformers as one of the vital equipment items; therefore, their safety and reliability are particularly important. During the long-term operation of a transformer, its electrical windings and core will be subjected to a variety of mechanical forces, and the cumulative effect of mechanical forces will lead to gradual deterioration of the insulation of the electrical windings and ultimately lead to internal transformer failure [
1,
2,
3,
4,
5]. Transformer minor faults are very frequent faults in the power system. For example, a turn to turn short circuit fault refers to the occurrence of a short circuit between adjacent turns within the same winding. It is mainly due to insulation aging, mechanical damage, winding vibration, etc., and may also be related to improper operation. Faults reflected in the electrical quantity relay protection device on the current are not large, resulting in the inverse-time overcurrent (ITOC) protection action time being long, which will further expand the scope of the fault.
ITOC protection is widely used in power systems, mainly as line backup protection, transformer protection, and so on. A large number of scholars have conducted relevant research on the long action time of inverse time protection when faults occur on the line [
6,
7,
8,
9,
10,
11]. For example, to solve the problem of prolonged protection action time when the fault current is small, references [
12,
13] modify the inverse time characteristic equation by introducing voltage or impedance factors. However, ITOC protection can not only reflect the relationship with the current but also react to the degree of overheating of electrical components, which is commonly used in transformer protection. In view of the advantages of the inverse time characteristic, many researchers have also begun to use ITOC protection or ITOC protection and fixed time overcurrent protection combined protection mode [
14,
15,
16,
17,
18,
19,
20]. However, this method can only optimize the coordination between protections and has poor effectiveness in solving the problem of long protection action time caused by minor internal faults in transformers. Therefore, it is necessary to accelerate the action time of the transformer inverse time overcurrent protection.
Most existing literature improves the reliability of protective actions by enhancing the performance of protective devices. For example, ref. [
21] proposes a resource-saving reed switch overcurrent protection that does not require current transformers, which can be used as an alternative to traditional current protection for 6–10 kV electrical devices connected to switchgear. Ref. [
22] introduces a new method for verifying directional overcurrent protection schemes in a ring topology distribution systems with distributed energy (DER). This method is used to verify the performance of the proposed protection scheme when the load is fully powered by DER, and emphasizes issues such as false tripping and protection system blindness caused by changes in short-circuit currents. However, the above research methods do not start from improving the speed of protection action itself. Even if the protection device acts very quickly, if the internal fault of the transformer does not meet the action conditions of the protection or the protection action time is too long, there is still a chance to expand the fault range and cause more serious losses.
Aiming at the above research status, this paper first analyzes the limitations of traditional ITOC protection. Further, it analyzes the limitations of the existing scheme to accelerate the action time of ITOC protection. When the transformer is in the situation of long-time heavy load and high oil temperature, and the transformer is slightly faulty internally, it puts forward a new project for ITOC protection based on transformer oil temperature acceleration [
23,
24,
25,
26,
27]. The project introduces the transformer oil temperature factor and acceleration index, which reacts to the actual temperature state of the transformer, modifies and accelerates the traditional ITOC protection, establishes the parameter optimization rectification mathematical model, and finally verifies the practicability and reliability of the proposed scheme by using software simulation-Matlab 2018 (b).
The organizational structure of this article is as follows:
Section 2 describes the principles and limitations of traditional inverse time overcurrent protection;
Section 3 introduces the transformer oil temperature factor to accelerate the inverse time action equation;
Section 4 verifies the feasibility of the new solution through simulation;
Section 5 plans future research work.
2. Transformer Inverse Time Limit Overcurrent Protection
2.1. The Basic Principle of Transformer Inverse Time Limit Overcurrent Protection
Take the dual winding transformer as an example and build the structure configuration diagram of the grid containing the dual winding transformer, as shown in
Figure 1, G represents the power supply, T represents the transformer, and A, B, and C represent the circuit names.
The ITOC protection action principle is to use the relay’s inverse time action characteristics; that is, the greater the current flowing through, the shorter the relay protection action time limit. ITOC protection is a reaction to the overheating state of the protection, using a special inverse time characteristic equation as shown in Equation (1) [
19]:
where
represents the action time of the relay protection device;
represents the time setting coefficient of the protection device;
represents the magnitude of the current flowing into the relay protection device;
represents the starting current of the protection device.
To ensure that the transformer ITOC protection device can effectively coordinate and cooperate with the upper and lower protection devices, the starting current is adjusted according to Equation (2).
where
represents the reliability coefficient of the protection, the range of values is 1.15~1.25;
represents the self-starting coefficient of the device; the value is determined by the specific network connection and load nature, with a value greater than 1;
represents the return coefficient of the current relay; the range of values is 0.85~0.95;
represents the maximum load current that may occur in the transformer, usually taken as the rated current of the transformer.
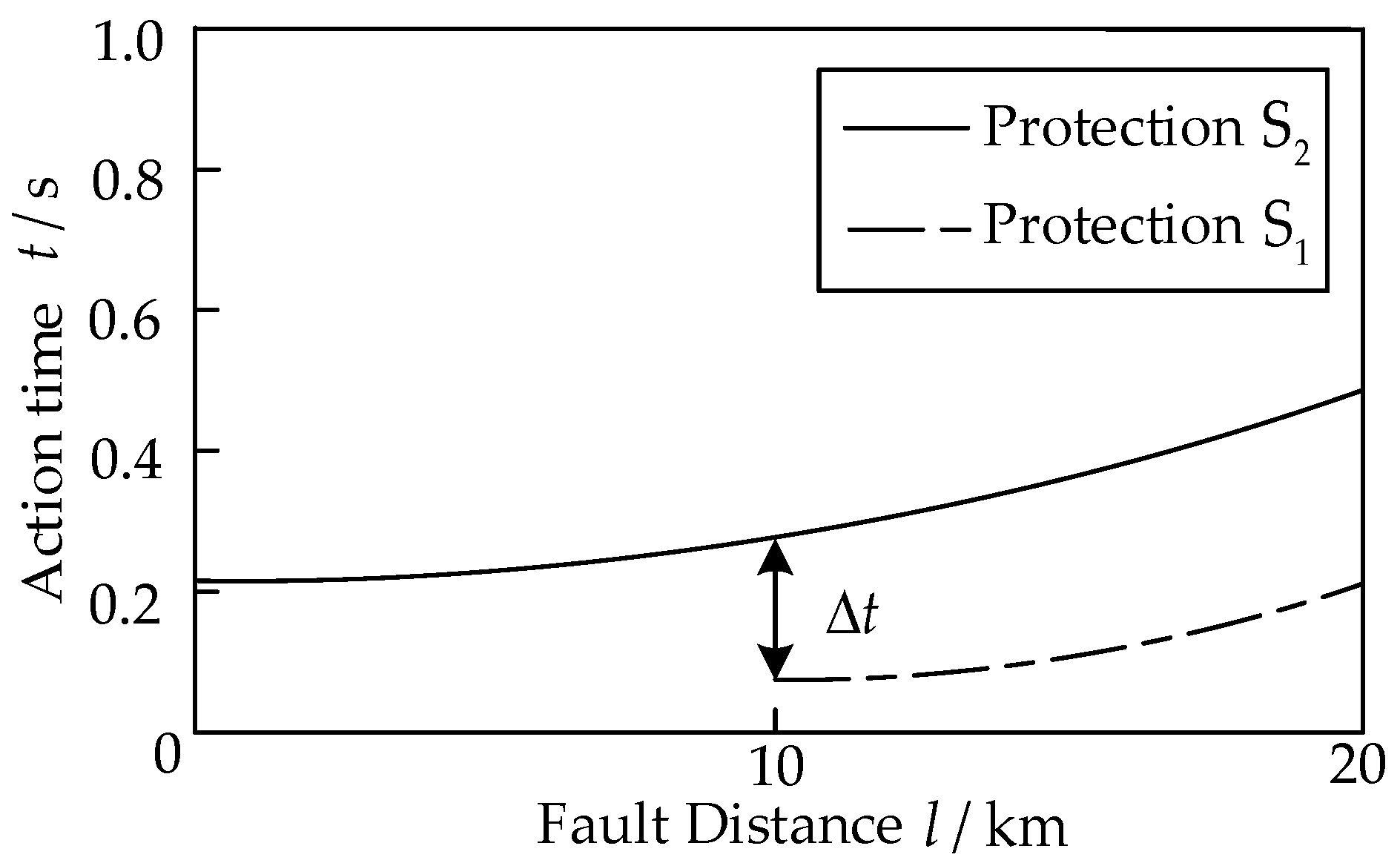
Figure 2 shows the relationship curve between the protection action time and the fault location. The specific setting process is as follows: protection S1 is located at the end of the power system, and its starting current is set to
according to Equation (2), with an action time of
. When there is a short circuit at point k1, under the action of the short circuit current
, the action time of protection S1 is set to the inherent action time
of the protection device, generally speaking
; according to Formula (1), the value of
can be obtained, and the inverse time action characteristic curve of protection S1 can be determined. For protection S2, the starting current
is set according to Equation (2). When there is a short circuit at point k1, the current values flowing through protection S1 and protection S2 are almost the same. To ensure the selectivity of actions between each protection, the action time limit should be adjusted step by step; that is, the action time of protection S2 is a one-time step
higher than that of protection S1, then the inverse time characteristic curve of protection S2 can be determined.
According to the action equation of the ITOC protection mentioned above, the current flowing through the protection device is very small when there is a slight fault inside the transformer. However, using the transformer ITOC protection action to remove the fault requires more time. To ensure the safe and stable operation of the transformer, further optimization and setting of the protection action time is necessary.
2.2. Acceleration Method for Inverse Time Overcurrent Protection Action
To accelerate the action time of ITOC protection, researchers have introduced voltage or impedance factors into the inverse time action equation to reflect the fault point’s characteristics accurately. By optimizing and setting these factors, the goal of improving the characteristic curve of inverse time protection action can be achieved.
The protection scheme proposed in reference [
12] accelerates the inverse time action equation with low voltage, and Equation (3) shows its action equation.
where
represents the voltage acceleration factor,
(including
and
) represents the voltage gradient index, and A represents the time coefficient. When the system is in maximum operating mode,
represents the fault current measured by the superior line protection when a three-phase short circuit fault occurs at the superior line protection outlet, and
represents the fault current measured by the superior line protection when a three-phase short circuit fault occurs at the subordinate line protection outlet. When the system is in the minimum operating mode,
represents the fault current measured by the upper-level line protection when a two-phase short circuit fault occurs at the end of the lower-level line.
This scheme utilizes the natural power flow distribution of the grid voltage during a fault and the functional relationship between the measured voltage and the fault point. The correction effect is improved by independently configuring the control parameters of voltage and current and segmenting controlling the action equation.
Reference [
13] proposes a low impedance accelerated inverse time overcurrent protection scheme, with the action equation shown in Equation (4).
where
represents the impedance acceleration factor, and this parameter is segmented into values. The specific method is shown in Equation (5).
where
represents the measured impedance, and
represents the impedance of the protected line.
This scheme uses impedance parameters to characterize the relationship between voltage and current, so the protection scheme is not affected by operating mode and fault type. On this basis, the quick action of the protection can also be improved, and the fault at the end of the line can also be acted on on time.
The above inverse time limit protection-acceleration action scheme introduces a voltage acceleration factor or an impedance acceleration factor to optimize the acceleration of action time and protection coordination relationship. The feasibility of the scheme is demonstrated through simulation experiments.
ITOC protection has the characteristic of exerting the tolerance of electrical equipment to fault current and temperature and also has a good ability to quickly remove serious faults. Under high temperature and heavy load operating conditions in summer, transformers often operate in a state where the oil temperature and winding temperature are too high, and their tolerance to current and temperature is limited. When there is a slight internal fault, traditional inverse time overcurrent protection and other protections often cannot be triggered, or the action time is too long. Therefore, it is necessary to improve the response ability of the protection, accelerate the action time of the protection, and avoid the development of faults and equipment damage. Due to impedance being the distance between the fault point and the protection installation site, when a minor fault occurs inside the transformer, the impedance does not change and the voltage change is not significant. If the voltage acceleration factor or impedance acceleration factor in the above scheme is used, the acceleration effect on the action time is not significant.
3. A New Inverse Time Overcurrent Protection Scheme Based on Transformer Oil Temperature Correction
3.1. Protection Action Equation
The selection of insulation materials in transformers is crucial for controlling the temperature rise of various components. The application of Class A insulation materials can ensure the stable operation of components within a specific temperature range. Once the working temperature exceeds the tolerance limit of these materials, the insulation function will be damaged and may even lead to equipment failure. Therefore, in the design and operation of transformers, selecting suitable insulation materials is a key step to ensure the safe and stable operation of the equipment. This choice needs to take into account the actual operating conditions to ensure the long-term safe and reliable operation of the transformer. When assuming an external ambient temperature of 40 °C, the specific temperature-rise limit is as shown in
Table 1.
Maintaining a suitable operating temperature is crucial in the operation of oil immersed transformers. By utilizing a cooling medium at 20 °C, it is possible to effectively ensure the normal operation of transformers for 20 years under the highest temperature conditions of 95–98 °C. The winding will generate a certain temperature difference during operation, usually with a difference of 10–13 °C between the highest temperature and the average temperature. However, due to the lack of a clear standard reference for measuring the highest temperature of the winding, the temperature of the winding can only be indirectly evaluated by measuring the average temperature.
To estimate the average temperature-rise limit of the winding, it is first necessary to calculate the difference between the maximum temperature and the average temperature of the winding. After deducting this difference from the highest temperature of the winding, subtract the average ambient temperature of last year from the result. Assuming the external ambient temperature reaches 40 °C, the expected average temperature of the winding will be 105 °C. In order to maintain the performance of the insulating oil, the upper limit of the surface temperature of the insulating oil is usually set at 85 °C, and its maximum temperature is limited to within 95 °C. This measure is to ensure that the transformer system can operate safely and reliably.
Therefore, when designing and operating oil immersed transformers, it is very important to comprehensively consider the environmental temperature, winding temperature-rise limit, and insulation oil temperature requirements, which helps ensure the long-term stable operation of the transformer system and extend its service life.
Based on the above analysis, this paper proposes to use the inverse time overcurrent protection principle of transformer oil temperature acceleration to accelerate the action time of the ITOC protection when the upper oil temperature or winding temperature is too high. The transformer oil temperature factor and acceleration index are introduced into the inverse time overcurrent action equation and optimized for tuning to address the insufficient response ability of the protection to minor faults in transformers under high oil and winding temperatures. It is called transformer oil temperature acceleration inverse time overcurrent protection (OTITO protection), and its action equation design is shown in Equation (6).
where
represents the time setting coefficient of OTITO protection device;
represents the starting current of the OTITO protection device;
represents the transformer oil temperature factor, and its calculation formula is shown in Equation (7), while
represents the acceleration index.
where
represents the transformer oil temperature,
represents the starting value of the transformer temperature protection, and can be set as the oil temperature alarm temperature value. According to the heat formula, the larger the current value, the greater the heat generated, resulting in a higher oil temperature of the transformer. Due to the slow temperature-rise process of transformer oil, which may affect the protection action time, the value of transformer oil temperature used in the article is the real-time oil temperature measured by the measuring instrument.
According to expression (7), when the transformer oil temperature is lower than the starting temperature, ; when the oil temperature of the transformer is higher than the starting temperature, and work together to improve the protection speed to ensure protection selectivity.
When a minor fault occurs inside the transformer, the fault current flowing to the relay protection device is detected to be relatively small. According to the action characteristics of traditional inverse time overcurrent protection, if the current value is greater than the starting current value of the traditional scheme, the traditional protection will take action. However, due to the small current value, the action time of the traditional protection is still relatively long. If the current value is less than or equal to the starting current value of the traditional scheme, the traditional protection will not operate. In either case, there is a high probability that the fault will be allowed to further expand, causing damage to the transformer and resulting in greater losses. Therefore, the article introduces the transformer oil temperature factor and acceleration index to accelerate the protection action time.
3.2. Protection Parameter Acceleration Characteristics
Oil temperature and winding temperature are the important operating condition parameters of a transformer. Long-time and high-temperature operation is very unfavorable to the transformer. The introduction of transformer oil temperature factor and accelerating index
adjust the protection action characteristic curve, improve quick-acting protection, and optimize the relationship between upper- and lower-level protection.
Figure 3 shows the acceleration index
and the inverse time overcurrent protection action time curve.
As shown in
Figure 3,
is a negative exponent. The action time of protection is inversely proportional to the acceleration index, and taking different acceleration indices will lead to different trends in the rate of change of protection action time. At this point, the degree of correction of the transformer oil temperature-correction factor to the protection is adjusted by adjusting the acceleration index, enhancing the adaptability of the inverse time overcurrent protection to different scenarios. Accurately controlling the action time difference
between upper- and lower-level protections can effectively solve the problem of protection selectivity mismatch, thereby achieving optimal speed and selectivity of the protection.
Figure 4 illustrates the relationship curve between the protection action time, fault current, and transformer oil temperature. When the oil temperature reaches the starting value but does not reach the high oil temperature tripping action value, if there is a slight fault inside the transformer and the fault current is small, this protection will operate longer. However, when the oil temperature increases or the fault current is large, this protection will accelerate its action.
From the image analysis, it can be seen that in the protection area, when simultaneously considering the transformer oil temperature and the influence of current on the ITOC protection, the action time of ITOC protection after transformer oil temperature correction decreases with the increase in measurement current and transformer oil temperature, and has inverse time characteristics. Therefore, the greater the degree of minor faults within the transformer, the higher the transformer oil temperature, and can effectively improve the protection action time characteristics.
Figure 5 shows that the OTITO protection start-up current in this paper is less than the traditional ITOC protection start-up current. The sensitivity of the protection to minor faults has been improved, and measures such as composite voltage blocking can be used to prevent malfunction due to overload.
As can be seen from
Figure 5, when the current flowing through the protective device is greater than the starting current value of OTITO protection is less than the starting current value of traditional ITOC protection, then OTITO protection is activated, and the traditional ITOC protection is not activated; when the current flowing through the protective device is greater than the starting current value of the traditional ITOC protection, the OTITO protection and the traditional ITOC protection are both able to be activated and the OTITO protection action time is smaller than the traditional ITOC protection action time. This also means that when traditional ITOC protection cannot act, OTITO protection can work reliably, and the scope of protection is also greater.
Combined with
Figure 3,
Figure 4 and
Figure 5, under high transformer oil temperature, if a minor fault occurs inside the transformer, the OTITO protection has sufficient response capability to this type of fault. At the same time, the OTITO protection can further accelerate the protection action time in the case of serious internal faults and optimize the relationship between the upper and lower levels of the action time coordination.
3.3. Protection Parameter Settings
According to
Section 2.1, the proposed protection action equation introduces the transformer oil temperature factor and acceleration index. During the protection setting process, it is necessary to consider the coordination relationship between the oil temperature acceleration index of transformers
and the lower-level line protection to ensure that the action time difference meets the requirements of protection selectivity and speed. The specific setting process is as follows:
As mentioned in
Section 2.1, starting from the setting of protection S1, the calculation formula for the time constant t of protection S1 can be obtained by determining the action characteristic curve of protection S1, as shown in Equation (8).
The OTITO protection has to operate without false activation at the maximum load current and reliably at the minimum fault current, thus requiring a limit on the starting current
. The specific requirements are as follows [
28,
29,
30,
31]:
where
represents the corresponding reliability factor,
represents the corresponding sensitivity factor, and
represents the minimum short circuit current.
For the first section of protection S2, the starting current at this time is set to according to Equation (2). In the event of a fault at the outlet of the lower-level line, it avoids the short-circuit current under the maximum operating mode to meet the selectivity of action between protections. Its action time is one value higher than the action time of protection S1; that is, .
For the second section of protection S2, it is necessary to meet the requirements of both speed and selectivity. That is, when the most serious fault occurs at the end of the BC section of the line, the action time of protection S2 is still one value
higher than the action time of protection S1. Based on this, it can be concluded that:
where
represents the current flowing through the protection device when the most severe fault occurs at the end of the BC section. The simultaneous equation can be solved to obtain the time constant
of protection S2 and the transformer acceleration index
. Thus, the action time curve of OTITO protection is shown in
Figure 6.
Figure 6 shows that in the event of a minor fault inside the transformer, the inverse-time overcurrent protection accelerated by the transformer oil temperature can act quickly. In the event of a next-level line fault, the OTITO protection can also maintain coordination with the lower-level protection, with an action time difference of no less than
, to achieve optimal protection speed while meeting the protection selectivity.
4. Example Simulation
Build a distribution network-simulation model of a dual winding transformer as shown in
Figure 1 in Matlab 2018 (b). The equivalent electromotive force of the system is 35 kV, the equivalent impedance is
, the rated capacity of the transformer is 10 MVA (maximum capacity value), the rated voltage is 35 kV/10 kV, and the percentage of short-circuit voltage is
. The percentage value of short-circuit voltage refers to the rated input line voltage of the short-circuit test (when the winding current reaches the rated value), and refers to the per unit value of the transformer leakage reactance. Each line section is 10 km, with the impedance being
and the load capacity being
. Set the limit values of the time step as follows:
,
. The oil temperature alarm temperature of the transformer in this power system is 85 °C, and the tripping temperature is 95 °C, which can maintain the service life of the transformer. The simulation verification scheme in this article takes the starting value of transformer oil temperature as the alarm temperature of 85 °C.
According to the above ITOC protection setting scheme, the traditional ITOC protection and OTITO protection were optimized and set. The results of each parameter setting are shown in
Table 2 and
Table 3. The data in the table show that after forming, the starting current value of the traditional ITOC protection device is greater than the starting current value of the OTITO protection device.
Based on traditional ITOC protection, transformer oil temperature acceleration is added. With the current ratio
as the independent variable, when the transformer oil temperature reaches the range of 85~95 °C, the protection action time curve will also vary with different oil temperature acceleration factors. The oil temperature acceleration factors are taken as 1.029, 1.060, 1.091, and 1.117 for analysis purposes. The action time change curve of the OTITO protection scheme is shown in
Figure 7.
According to
Figure 7, it can be seen that when the current value flowing through the protection device is constant, the OTITO protection can accelerate the action time of the protection through the range of oil temperature changes in transformers. The higher the transformer oil temperature, the lower the protection action time, indicating that the OTITO protection can accelerate the action time of the protection through the transformer oil temperature; this proves the feasibility of OTITO protection.
When taking the transformer oil temperature factor as the independent variable and taking different current ratios, the action time variation curve of OTITO protection is shown in
Figure 8.
As shown in
Figure 8, the value of transformer oil temperature factor is inversely proportional to the OTITO protection action time. This means that the introduction or absence of the transformer oil temperature factor has a significant impact on the protection action time. When the transformer oil temperature factor has no accelerating effect on the action time, i.e.,
, the action time of the protection is relatively long. As the oil temperature factor of the transformer increases, the protection action time decreases, indicating that OTITO protection has an improvement effect on traditional inverse time overcurrent protection.
If there is no fault in the system, compare the current flowing through the transformer under different loads and the set current value of OTITO protection under heavy loads. The comparison curve between normal load current and OTITO protection startup current is shown in
Figure 9.
As shown in
Figure 9, when no faults occur, regardless of whether the power system operates with light or heavy loads, the current flowing through the transformer is smaller than the set current of the OTITO protection under load. Therefore, OTITO protection can ensure the reliability of protection by ensuring that the transformer does not malfunction during normal load operation.
However, after adjusting different values, the starting current of OTITO protection is smaller than that of traditional inverse time overcurrent protection. At this point, the action time of traditional ITOC and OTITO protection is shown in
Figure 10.
Based on the comprehensive analysis of
Figure 10 and
Figure 11, it can be concluded that OTITO protection can reliably operate when traditional inverse time overcurrent protection cannot operate. The conclusion is further verified, and the transformer oil temperature is within the starting value to tripping value range. The OTITO protection action time curve is generally lower than the traditional inverse time overcurrent protection action curve, indicating that OTITO protection can act more sensitively in cases of faults compared to traditional ITOC protection, highlighting the superiority of OTITO protection.
As shown in
Table 4, the transformer has been operating under heavy load for a long time, and the oil temperature has risen to the alarm temperature. When a slight short-circuit fault occurs inside the transformer, the traditional inverse time overcurrent protection action time is too long. Therefore, the oil temperature factor is used to accelerate the protection action time, and the action time of OTITO protection and traditional inverse time overcurrent protection is obtained.
According to the data analysis in
Table 4, when there is a slight internal fault in the transformer, the fault current flowing through the protection device is relatively small. Traditional inverse time overcurrent protection does not operate, or the action time is too long, while OTITO protection can act sensitively, quickly, and reliably. When selecting an appropriate transformer oil temperature acceleration factor value, the action speed of OTITO protection greatly increases. As the oil temperature further rises, the action speed of OTITO protection can meet the requirements of accelerating to instantaneous quick break protection.
As shown in
Table 5, if a fault occurs at the first end of the lower line BC, the short-circuit current flows through the lower protection S1 and this protection. To meet the protection selectivity, the OTITO protection and the traditional inverse time overcurrent protection on the lower line need to meet the requirements of the coordination relationship. After the transformer oil temperature reaches the alarm temperature and before the tripping temperature, the action time of each protection needs to be calculated separately.
The data in
Table 5 show that when the first end of the lower-level line malfunctions, the action time of protection S1 is 0.062 s. Suppose the upper-level protection is a traditional inverse time overcurrent protection. In that case, its action time is 1.012 s, and the difference in action time between the two is 0.95 s, which is greater than T, meeting the selectivity requirement. If the upper-level protection is OTITO protection, and the transformer oil temperature factor A = B, its action time is 0.268 s. The difference in action time between the two is 0.206 s, with a value slightly greater than T. This meets the selectivity requirements and acts on time when protection action is needed. When the transformer oil temperature factor A = B, its action time is 0.369 s, and the difference in action time between the two is 0.307 s. With a value of less than 0.95 s, it becomes evident that the OTITO protection operates swiftly while effectively maintaining the coordination between the upper and lower levels.
As shown in
Table 6, if a fault occurs at the end of the lower line BC, the transformer oil temperature factors are still taken as 1.029 and 1.117, and the action time of the protection at this time is calculated.
The data in
Table 6 show that when the first end of the lower-level line malfunctions, the action time of protection S1 is 0.089 s. If the upper-level protection is traditional inverse time overcurrent protection, its action time is 1.355 s, and the difference in action time between the two is 1.266 s. If the upper-level protection is OTITO protection, when the transformer oil temperature factor a = b, the action time is 0.341 s, and the difference in action time between the two is 0.252 s. Its value increases by 0.046 s compared to the action time difference of 0.206 s when the first end of the line malfunctions. When the transformer oil temperature factor a = b, its action time is 0.470 s, and the difference in action time between the two is 0.381 s. The value increases by 0.074 s compared to the action time difference of 0.307 s when the first end of the line malfunctions, this indicates that the action time of OTITO protection slightly increases when the BC end of the lower line malfunctions compared to when the first end of the line malfunctions. This further substantiates the rapid performance of OTITO protection while maintaining selectivity.
Based on the data analysis in
Table 4 and
Table 5, it can be concluded that if traditional inverse time protection actions are used, the difference in action time between the upper and lower levels of protection is too large, which is prone to the situation where the protection does not act at the same time, causing the fault range to expand and affecting the stable operation of the power system. If OTITO protection is used, whether there is a fault at the beginning or end of a lower-level line, this protection can meet selectivity. It can quickly act when protection action is needed, making it more practical.
When there is a minor internal fault in the transformer and the transformer oil temperature is close to the temperature protection set trip value, the traditional solution is to wait until the transformer oil temperature reaches the trip value and use gas protection action to cut off the fault. However, the time for gas protection to remove faults is usually longer. If the transformer oil temperature further increases during this process, it can cause serious internal faults or even burn out the transformer. Moreover, the transformer oil temperature approaching the trip value can cause serious damage to the transformer. To ensure the safe operation of the transformer, OTITO protection uses the transformer oil temperature-correction factor to accelerate the protection action time. The action time curve when the transformer oil temperature reaches 1–2 °C before the trip value is shown in
Figure 11.
From
Figure 11, it can be seen that the overall action time of OTITO protection is lower than that of gas protection, and OTITO protection accelerates the protection action time to close to the quick action protection action time 1–2 °C before the transformer oil temperature reaches the tripping value, indicating that OTITO protection can cut off the fault before the accident develops more seriously, allowing the power system to operate stably and reliably.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}