
Electric Vehicle Charging Load Prediction Considering Spatio-Temporal Node Importance Information
Abstract
1. Introduction
2. Methodology
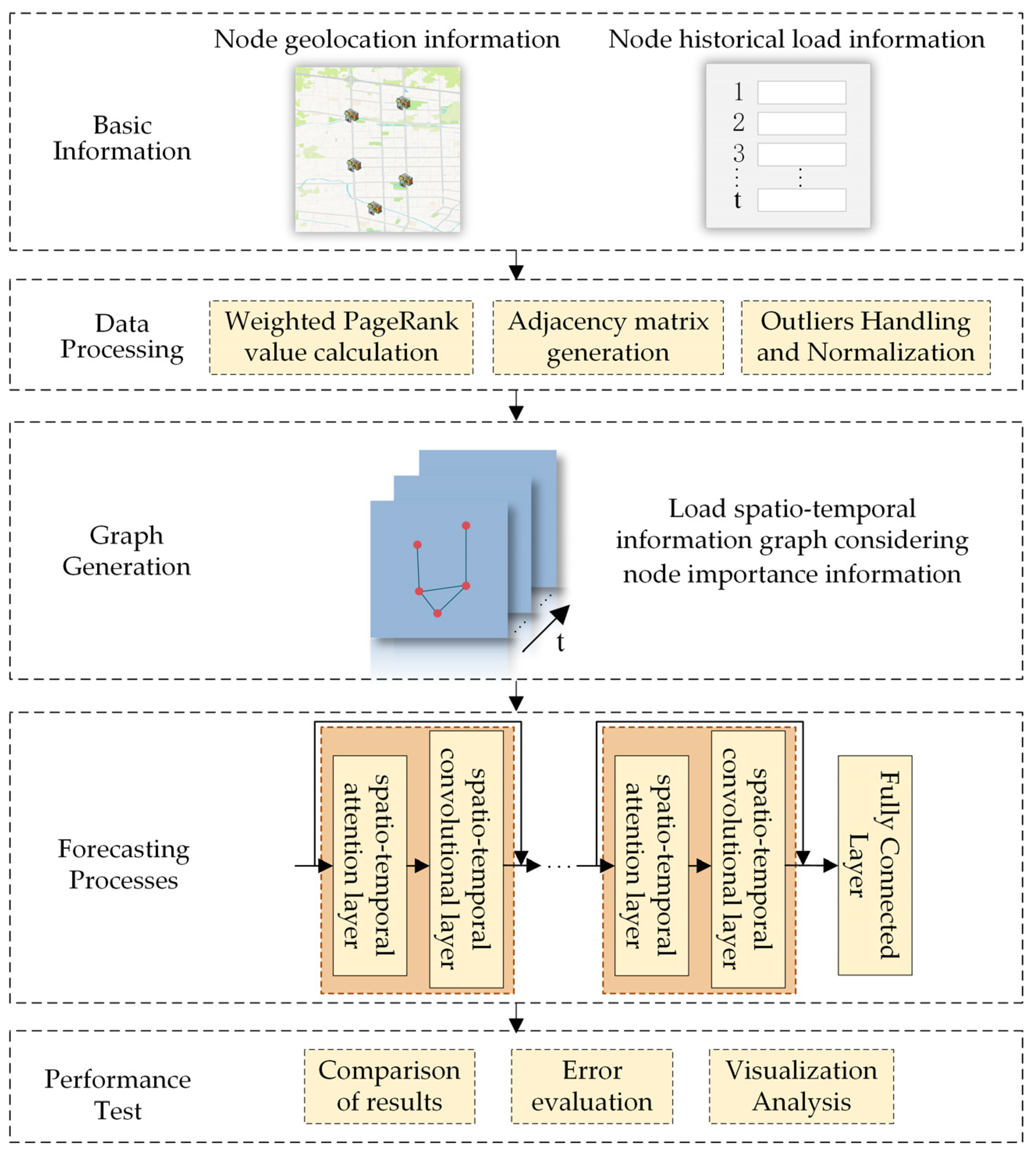
2.1. Prediction Model
- (1)
- In each time slice, the importance degree of each charging station node is calculated based on the historical load information and the actual traffic geographic location information of the node, so as to obtain a dynamic spatio-temporal importance degree information of the node, and initially excavate the spatio-temporal correlation characteristics of the charging load.
- (2)
- Combine the spatio-temporal importance information of each charging station node in each time slice with the corresponding historical load data to form a node feature vector containing multi-dimensional features, and construct the connection relationship between nodes, according to the geographic location information of the nodes, to generate a load spatio-temporal information graph that comprehensively considers the importance information of the nodes.
- (3)
- Input the spatio-temporal information graph to the spatio-temporal attention layer, calculate the degree of association of each load node with other nodes at the current moment through the attention mechanism [21], and dynamically adjust the feature weights to improve the model’s attention to the important nodes.
- (4)
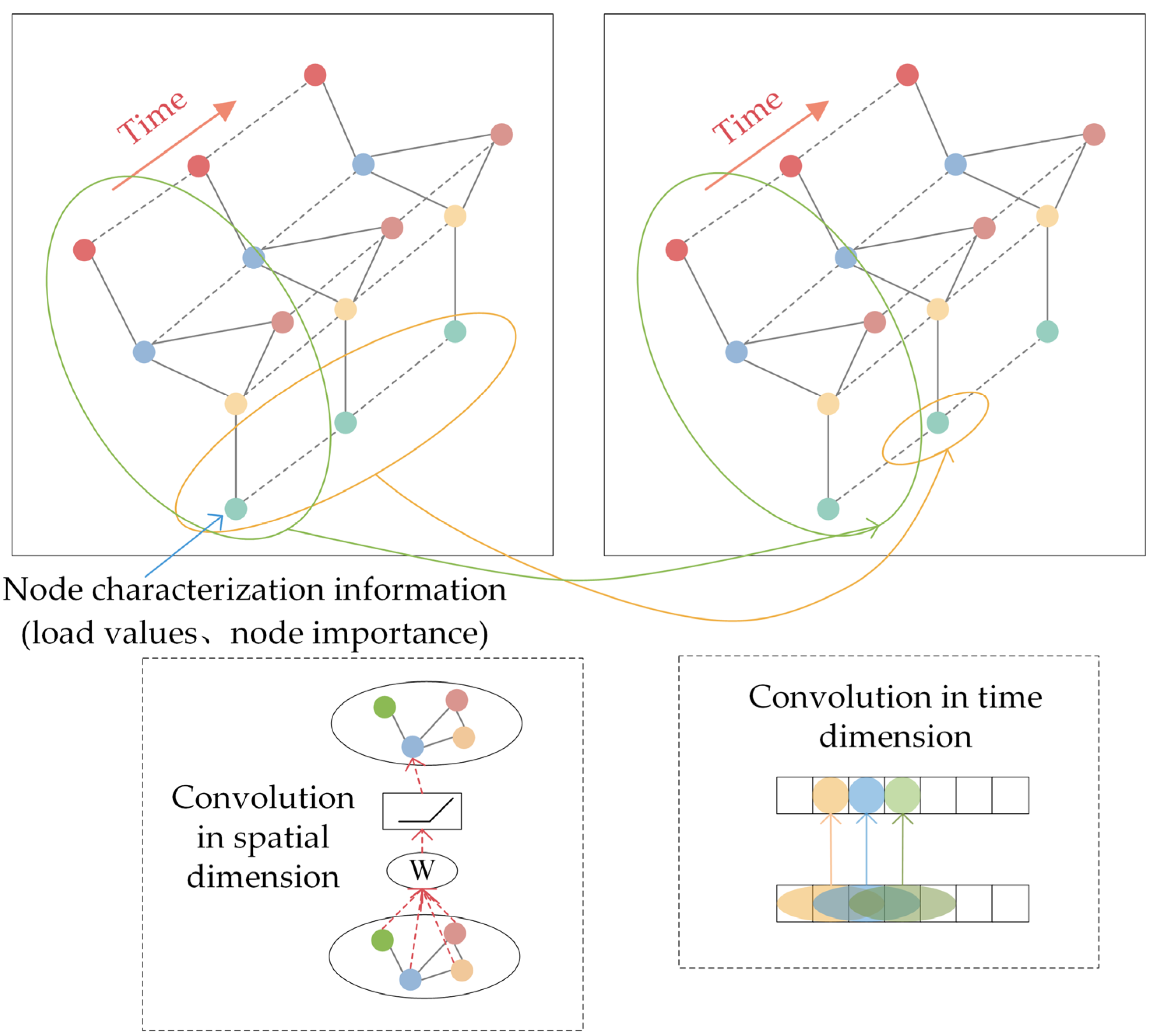
- Utilize spatio-temporal convolutional network to perform convolution operation on the output results of spatio-temporal attention layer to further capture the local patterns in time and space, and improve the model’s ability to extract complex spatio-temporal features.
- (5)
- Integrate the output results of the spatio-temporal convolutional layer through the fully connected layer to generate the final prediction results, i.e., map the high-dimensional feature vectors to the output space through the fully connected layer to output the predicted charging load values.
2.2. Spatio-Temporal Feature Extraction Layer
2.2.1. Data Preprocessing
2.2.2. Spatio-Temporal Node Importance
- (1)
- The PageRank algorithm assigns the PR value of each node to all other nodes it points to equally, but in the network composed of charging station nodes, there are differences in the relationship between nodes, so it is necessary to assign the PR value based on specific relevance. Considering the influence of the geographic location of the charging stations on their importance, a weighted PageRank algorithm is used, where the weights of the edges reflect the distance between the charging stations.
- (2)
- The PageRank algorithm takes into account the number of outgoing links, i.e., the number of nodes pointing from one node to other nodes, in its calculations. But the actual transportation roads are well connected, and all the charging stations are reachable from each other; i.e., the influence of each charging station on other charging stations is bi-directional. So a weighted undirected graph is constructed for the actual calculations to take into account the bi-directional influence of each undirected edge on the connected nodes.
- (3)
- The charging station load information can reflect the actual usage of the charging station, which reflects the capacity and usage frequency of the charging station to a certain extent, so its influence on the importance of the charging station should also be considered when calculating the key nodes of the charging station.
2.2.3. Multi-Head Attention Mechanism
2.3. Spatio-Temporal Convolutional Layer
2.3.1. Spatial Convolutional Network
2.3.2. Temporal Convolutional Network
3. Case Study
3.1. Data Preparation
3.2. Result Analysis
3.2.1. Model Prediction Performance Comparison
- (1)
- SVR (Support Vector Machine Regression): utilizes support vector machines for regression prediction;
- (2)
- LSTM (Long Short-Term Memory Network): a temporal recurrent neural network;
- (3)
- GCN (Graph Convolutional Neural Network): a neural network for processing graph-structured data, where feature updates at all nodes follow the same rules.
- (4)
- GAT (Graph Attention Network): introduces an attention mechanism based on GCN and assigns different attention weights according to different neighboring nodes.
- (5)
- DAGAT (Dynamic Adaptive Graph Attention Network) [25]: combines a multi-head attention mechanism with an adaptive correlation graph to capture spatio-temporally correlated features.
- (6)
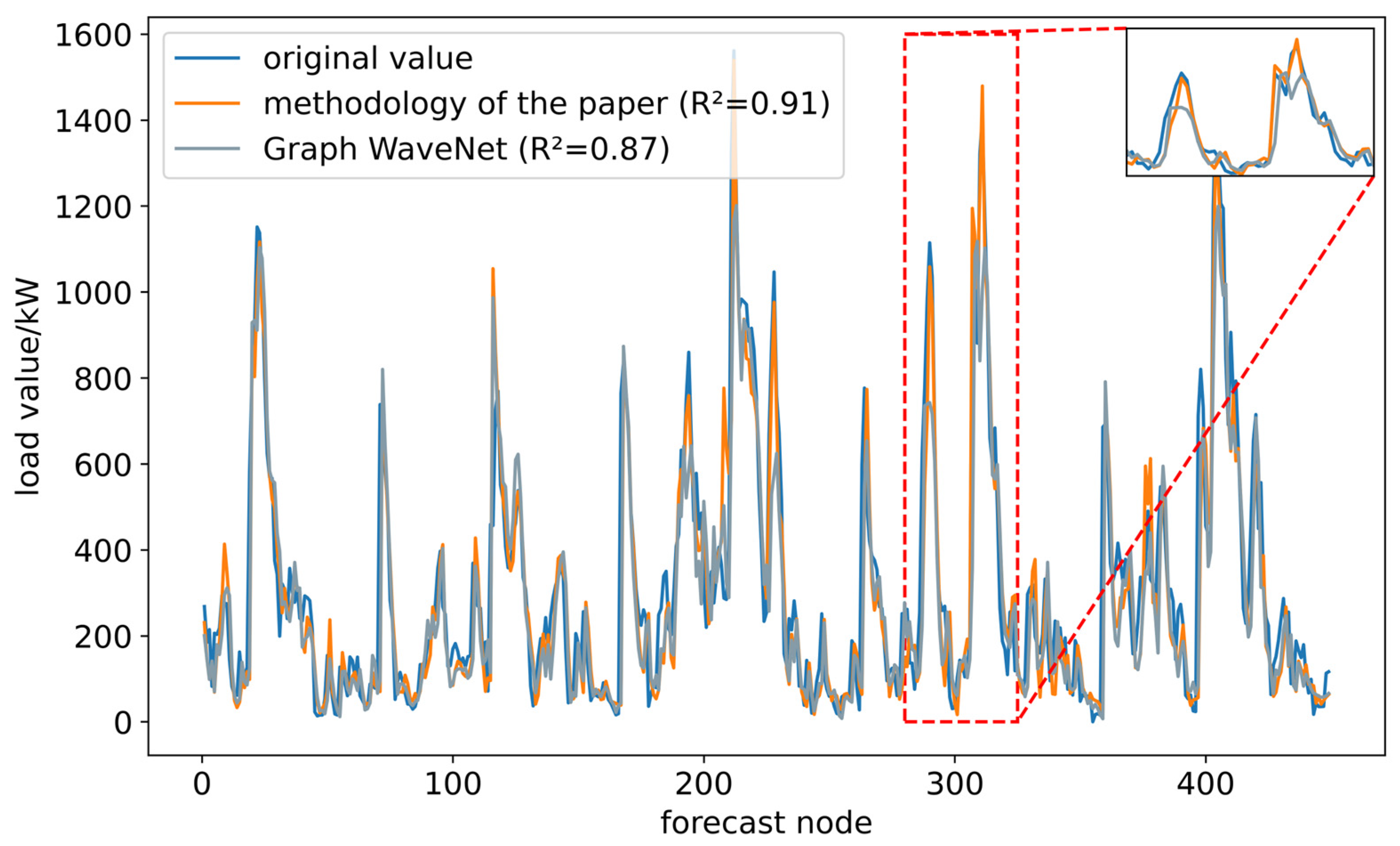
- Graph WaveNet [26]: learning by adaptive dependency matrix and node embedding so as to capture spatio-temporal dependencies.
- (1)
- The method in this study has the best prediction effect. Compared with the second best prediction, the MAE and RMSE of this study’s method are reduced by 10.56% and 3.74%, respectively.
- (2)
- SVR and LSTM predict poorly, while GCN, GAT, DAGAT, and Graph WaveNet, which are graph-based models, are better than SVR and LSTM, which only consider temporal features, proving the importance of spatial dimension information for charging station load prediction.
- (3)
- GAT adds an attention mechanism to GCN so that nodes can assign different attention weights when aggregating neighbor information, thus flexibly dealing with the degree of influence of different neighbor nodes on the central node, and better mining the features in the load information, so the prediction effect is better than GCN; DAGAT adds a dynamic adaptive adjacency matrix to GAT, which can capture the important dynamic changes of nodes to better mine features and further improve the prediction performance; and Graph WaveNet, by developing a new adaptive dependency matrix and learning it through node embedding, can better capture the spatial dependency of the data, and its prediction effect is also better than the other models mentioned above. These observations also prove that fully considering the hidden information in the spatio-temporal dimension can significantly improve the load prediction effect.
- (4)
- The method in this study combines the advantages of each of the above models, and the prediction performance has been further improved. From the results of the ablation experiments, it can be seen that by combining the spatio-temporal node importance information computed through the improved PageRank algorithm with the attention mechanism, the MAE and RMSE of the model are reduced by 7.82% and 3.31%, respectively. And the model is able to more accurately capture spatio-temporal correlations and dynamic features in the charging load data, which improves the prediction performance. The results also demonstrate that, in addition to relying on deep learning methods to capture spatio-temporal coupling from raw load data, the method that takes into account the actual traffic geographic location information of charging stations and combines it with load information can maximize the mining of spatio-temporal features with the best prediction results.
3.2.2. Input Duration Prediction Performance Comparison
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the Art and Trends in Electric and Hybrid Electric Vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Jiang, Z.; Xie, Y.; Gong, F.; Liu, S.; Fan, H.; Chen, X. Research on Planning of Connecting Large-Scale Electric Vehicle Charging Facilities to Distribution Network. In Proceedings of the 2023 IEEE 3rd International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 27–29 October 2023. [Google Scholar] [CrossRef]
- Zaboli, A.; Kasimalla, S.R.; Park, K.; Hong, Y.; Hong, J. A Comprehensive Review of Behind-the-Meter Distributed Energy Resources Load Forecasting: Models, Challenges, and Emerging Technologies. Energies 2024, 17, 2534. [Google Scholar] [CrossRef]
- Zheng, Y.; Niu, S.; Shang, Y.; Shao, Z.; Jian, L. Integrating plug-in electric vehicles into power grids: A comprehensive review on power interaction mode, scheduling methodology and mathematical foundation. Renew. Sustain. Energy Rev. 2019, 112, 424–439. [Google Scholar] [CrossRef]
- Zheng, Y.; Shao, Z.; Shang, Y.; Jian, L. Modeling the temporal and economic feasibility of electric vehicles providing vehicle-to-grid services in the electricity market under different charging scenarios. J. Energy Storage 2023, 68, 107579. [Google Scholar] [CrossRef]
- Lei, X.; Yu, H.; Yu, B.; Shao, Z.; Jian, L. Bridging electricity market and carbon emission market through electric vehicles: Optimal bidding strategy for distribution system operators to explore economic feasibility in China’s low-carbon transitions. Sustain. Cities Soc. 2023, 94, 104557. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Choi, D.-H. Distributionally Robust Model Predictive Control for Smart Electric Vehicle Charging Station with V2G/V2V Capability. IEEE Trans. Smart Grid 2023, 14, 4621–4633. [Google Scholar] [CrossRef]
- Jia, Z.; Li, J.; Zhang, X.; Zhang, R. Review on Optimization of Forecasting and Coordination Strategies for Electric Vehicle Charging. J. Mod. Power Syst. Clean Energy 2023, 11, 389–400. [Google Scholar] [CrossRef]
- Nespoli, A.; Ogliari, E.; Leva, S. User Behavior Clustering Based Method for EV Charging Forecast. IEEE Access 2023, 11, 6273–6283. [Google Scholar] [CrossRef]
- Chen, Y.; Jiang, Y.; Xu, G.; Cui, J.; Qing, D.; Zhu, X. Load forecasting of electric vehicles based on Monte Carlo method. In Proceedings of the 2020 5th International Conference on Mechanical. Control and Computer Engineering (ICMCCE), Harbin, China, 25–27 December 2020. [Google Scholar] [CrossRef]
- Liang, C.; Li, W. Electric Vehicle Charging Load Forecasting Model Considering Users’ Travel Rules. In Proceedings of the 2023 3rd New Energy and Energy Storage System Control Summit Forum (NEESSC), Mianyang, China, 26–28 September 2023. [Google Scholar] [CrossRef]
- Zhuang, Z.; Zheng, X.; Chen, Z.; Jin, T.; Li, Z. Load Forecast of Electric Vehicle Charging Station Considering Multi-Source Information and User Decision Modification. Energies 2022, 15, 7021. [Google Scholar] [CrossRef]
- Zheng, Y.; Shao, Z.; Zhang, Y.; Jian, L. A Sytematic Methodology for Mid-and-Long Term Electric Vehicle Charging Load Forecasting: The Case Study of Shenzhen, China. Sustain. Cities Soc. 2020, 56, 10204. [Google Scholar] [CrossRef]
- Tang, Z.; Hu, Q.; Cui, Y.; Rao, W.; Li, Y. Predicting Electric Vehicle Charging Load Using Graph Attention Networks and Autoformer. In Proceedings of the 2024 IEEE 4th International Conference on Power, Electronics and Computer Applications (ICPECA), Shenyang, China, 26–28 January 2024. [Google Scholar] [CrossRef]
- Mohammad, F.; Kang, D.-K.; Ahmed, M.A.; Kim, Y.-C. Energy Demand Load Forecasting for Electric Vehicle Charging Stations Network Based on ConvLSTM and BiConvLSTM Architectures. IEEE Access 2023, 11, 67350–67369. [Google Scholar] [CrossRef]
- Matrone, S.; Ogliari, E.; Nespoli, A.; Leva, S. Electric Vehicle Supply Equipment Day-Ahead Power Forecast Based on Deep Learning and the Attention Mechanism. IEEE Trans. Intell. Transp. 2024, 25, 9563–9571. [Google Scholar] [CrossRef]
- Zhao, Y.; Dong, J.; Fan, X.; Lin, X.; Tang, J.; Qian, B.; Zhang, F. Electric Vehicle Charging Load Prediction Method Based on Nonlinear Auto-Regressive Neural Networks. In Proceedings of the 2023 4th International Conference on Computer Engineering and Intelligent Control (ICCEIC), Guangzhou, China, 20–22 October 2023. [Google Scholar] [CrossRef]
- Zhou, D.; Guo, Z.; Xie, Y.; Hu, Y.; Jiang, D.; Feng, Y.; Liu, D. Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting. Energies 2022, 15, 6195. [Google Scholar] [CrossRef]
- Zhang, X.; Chan, K.W.; Li, H.; Wang, H.; Qiu, J.; Wang, G. Deep-Learning-Based Probabilistic Forecasting of Electric Vehicle Charging Load With a Novel Queuing Model. IEEE Trans. Cybern. 2021, 51, 3157–3170. [Google Scholar] [CrossRef] [PubMed]
- He, C.; Zhu, J.; Lan, J.; Li, S.; Wu, W.; Zhu, H. Optimal planning of electric vehicle battery centralized charging station based on EV load forecasting. IEEE Trans. Ind. Appl. 2022, 58, 6557–6575. [Google Scholar] [CrossRef]
- O’Donnell, J.; Su, W. Attention-Focused Machine Learning Method to Provide the Stochastic Load Forecasts Needed by Electric Utilities for the Evolving Electrical Distribution System. Energies 2023, 16, 5661. [Google Scholar] [CrossRef]
- Cheng, W.; Yang, B.; Zhang, R.; Wu, Q.; Zhu, B.; Liu, Z.; Xi, H.; Niu, K. Research on Key Node Identification Method of Transmission Network based on Improved PageRank Algorithm. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022. [Google Scholar] [CrossRef]
- Guo, S.; Miao, S.; Yin, H.; Wang, Z.; Han, J. Construction of Coupling Model and Evaluation of Node Importance for Electric Sensor Communication Network. In Proceedings of the 2020 IEEE 1st China International Youth Conference on Electrical Engineering (CIYCEE), Wuhan, China, 1–4 November 2020. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Feng, N. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Beijing, China, 27 January–1 February 2019. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Z.; Liu, C.; Zhang, X.; Zhou, Y. Electric vehicle charging load prediction based on dynamic adaptive graph neural network. Autom. Electr. Power Syst. 2024, 48, 86–93. [Google Scholar] [CrossRef]
- Hu, B.; Zhang, P.; Huang, E.; Liu, J.; Xu, J.; Xing, Z. Graph WaveNet based charging load forecasting of electric vehicle. Autom. Electr. Power Syst. 2022, 46, 207–213. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | LSTM | GCN | GAT | DAGAT | Graph WaveNet | Methodology of the Study-A | Methodology of the Study |
|---|---|---|---|---|---|---|---|
| input channels | 1 | 1 | 1 | 1 | 1 | 1 | 2 |
| input dimensions | 24 | 24 | 24 | 24 | 24 | 4 | 4/24/48/96 |
| number of layers | 3 | 2 | 2 | 3 | 8 | 2 | 2 |
| hidden units | 30 | 16 | 64 | 64 | 64 | 64 | 64 |
| batch size | 32 | 64 | 32 | 32 | 64 | 32 | 32 |
| learning rate | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 | 0.004 | 0.004 |
| Method | MAE | RMSE |
|---|---|---|
| SVR | 28.09 | 57.36 |
| LSTM | 26.84 | 53.32 |
| GCN | 25.88 | 50.74 |
| GAT | 23.88 | 47.67 |
| DAGAT | 21.59 | 43.20 |
| Graph WaveNet | 20.55 | 42.21 |
| Methodology of the study-A | 19.94 | 42.02 |
| Methodology of the study | 18.38 | 40.63 |
| MAE | RMSE | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 h | 6 h | 12 h | 1 day | 1 h | 6 h | 12 h | 1 day | |
| 15 min | 13.30 | 14.88 | 16.40 | 16.69 | 25.27 | 26.63 | 28.20 | 28.32 |
| 30 min | 17.65 | 17.01 | 16.72 | 16.55 | 38.16 | 32.09 | 30.03 | 28.11 |
| 45 min | 20.46 | 18.78 | 17.34 | 16.55 | 45.14 | 33.80 | 31.29 | 28.89 |
| 60 min | 22.36 | 20.16 | 18.84 | 16.86 | 49.55 | 37.13 | 35.72 | 30.15 |
| average | 18.38 | 17.71 | 17.32 | 16.66 | 40.63 | 32.63 | 31.43 | 18.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, S.; Zhang, X.; Yu, H. Electric Vehicle Charging Load Prediction Considering Spatio-Temporal Node Importance Information. Energies 2024, 17, 4840. https://doi.org/10.3390/en17194840
Hou S, Zhang X, Yu H. Electric Vehicle Charging Load Prediction Considering Spatio-Temporal Node Importance Information. Energies. 2024; 17(19):4840. https://doi.org/10.3390/en17194840
Chicago/Turabian StyleHou, Sizu, Xinyu Zhang, and Haiqing Yu. 2024. "Electric Vehicle Charging Load Prediction Considering Spatio-Temporal Node Importance Information" Energies 17, no. 19: 4840. https://doi.org/10.3390/en17194840
APA StyleHou, S., Zhang, X., & Yu, H. (2024). Electric Vehicle Charging Load Prediction Considering Spatio-Temporal Node Importance Information. Energies, 17(19), 4840. https://doi.org/10.3390/en17194840