In this section, we derive the dynamical homotopy problem, provide a numerical strategy for solving it numerically, and describe procedures for initializing the problem, considering explicit and implicit integration methods.
In (
12), the solution of the PFP is obtained when
. However, starting from
, note that for each discrete value
, a nonlinear system of the type
needs to be solved until
. It is expected that the results found for each
are the states near the ones of the next point in
until the last step
. Using the NR method to calculate the next point in the homotopy path, it is reasonable to expect convergence of the classical NR method in this scenario, thus combining a static homotopy and classical methods [
37]. In our specific aim, we intend to minimize the necessity of using the NR method or comparable alternatives for this particular circumstance. In this sense, we convert (
12) to a set of differential equations in the independent parameter
t for using an integration method. Initially this dynamic approach to solving ill-posed problems was applied in other areas of knowledge [
38,
39]. This dynamic homotopy approach to solving PFP problems was presented by [
27]. A general dynamic form uses a scalar in a homotopy function to solve nonlinear equations in the time-dependent domain function to improve ill-conditioned systems with poor initial value [
40,
41].
3.1. Definition of the Homotopy Problem Easy Solution
The definition of the function is one of the targets in the resolution of the homotopy problem. It will affect the pathway of the solutions to reach the desired result, which is to find the roots of .
In (
12), it was defined
. The equation represents a simple way of handling the homotopy path from the easy solution
to the solution of the original problem at
. Note that
is the function to establish the easy solution. The fixed point vector homotopy function (FPV) [
41] was selected to represent
. However, in this paper, it was modified to
by introducing a factor
K and different from unity. This change will play a key role in addressing ill-conditioned power flow problems, as will be shown later.
Considering the flat voltage start, voltage values for all PQ-bus have magnitude 1 pu; all buses have phase zero; and the voltage magnitudes are kept constant in the controlled voltage buses (PV-type). Therefore, the initial voltage magnitude vector is
, assigned only to PQ buses since the voltage magnitude is unknown in this type of bus. As at the beginning of the procedure
, the boundary condition for the Equation (
12) gives
, i.e.,
From (
22), given that in
the result is
and
, it is easy to verify that there is a trivial solution in
for the states and the ODE’s IC coincides with the initial estimate of the PFP. Remark that the factor
K is redundant at this IC point in view of the trivial solution. Therefore, we believe that this trivial assumption in other publications, such as in [
41], contributed to the assigning of a unitary value for
K to values
as well. However, the assumption can be exploited in another way to improve the performance of the dynamic homotopy approach.
Now, differentiating the Equation (
12) with relation to the state vector
, we have
. Knowing that
is the PFP Jacobian matrix and
,
where
is the identity matrix;
is a time-step defined for the integration method, and
Note that the term
, in Equation (
23), acts in the sense to attenuate (or remove) the ill-conditioning of
for
. The impact depends on
t and the factor
K.
3.2. Performance of the Solvers in the First Time-Step
Assume that the homotopy pathway starts at with the initial state , defined by the ODE’s IC. It then evolves through time instants , spaced by a time-step , where and N is the number of time-steps, until . The procedure allows for variable time steps along the pathway, which can result in reduced accuracy for large time steps. However, at each time step, at least one LU factorization needs to be performed, because it is necessary to perform a computation of the type , which increases the computational cost. Therefore, various aspects need to be analyzed in order to determine an appropriate method for computing the solution of the nonlinear equation systems at the end of the homotopy pathway.
Given a time-step , the homotopy pathway can diverge from the exact path point for the first time-step, at , depending on the choice of the and . The analysis below concerns the choice based on the fixed point function, FPV, as defined previously, i.e., . The first point, , on the pathway will be calculated to demonstrate that even though is very small, using an explicit integration solver at this time may not be appropriate, especially for ill-conditioned systems.
Let the FE solver be used to compute the states in the step
. Then, for
and
,
and
. It implies from (
16) that the increment
. i.e., the deviation
is proportional to the mismatch
. However, in the case of ill-conditioned systems,
and the ratio
needs to be set in a very small value. On the other hand, this strategy leads to small deviations
, causing slow convergence, with stagnation or leading to early divergence of the homotopy problem. The error increases when using an explicit integration method that requires the calculation of intermediary points, such as RK2. This is because computations involving the mismatch
are involved even more. Additionally, the error increases because it depends on partial results of the type
, as in the case of RK2. Therefore, it is necessary to establish a proper method to calculate
with a very small time-step.
Now, let the BE scheme be used to compute the states in the instant
. From (
17), the increment is
and the unknown is
, which arises in the two side of the equation. Considering the time-step
, the fixed-point iteration technique is applied to the expression to obtain
. Assume that, in its
i-th iterate, the unknown is the variable
. In this paper, to minimize computations involving the inverse of
, we suggest calculating just one iteration
i and assigning
to compute
, the final result of interest, for a simplified result. Then, the updated result yields
where
.
Interesting to note that in (
25), the original PFP ill-conditioned Jacobian
of the initial iteration was modified by the introduction of the small-perturbation factor
for this step
. According to [
29], the small perturbation factor allows an adequate conditioning procedure to solve the original ill-posed problem. Also, in the function of the assignment of
and
, the factor
K is determined as
. Therefore, not necessarily equal to unity.
Another form to achieve a good result when the step size
is very small, given
, is by solving (
12) for a specific
. In this scenario, only the states are considered as variables. Then, an approximation for the states at
can be obtained by solving the algebraic equation
, assuming a linear approximation for
. According to [
28], a linear approximation of
around
gives
Considering that
for computing (
26), then
,
, and
. Then, the linear approximation in (
26) gives the deviation
Note that, after some algebraic handling, the result in (
27) is identical to that in (
25), and the result obtained by the linear approximation and through the BE solver agrees. Hence, using these two forms for approximating the states at the time step
provides results close to the homotopy pathway. These approximations are suitable to be used as initial conditions at
for numerical integration methods for the homotopy pathway. Particularly, explicit techniques are unable to yield satisfactory results without this initialization.
The remaining points, for
, should preferably be calculated with integration steps
much larger than the initial one
. This requisite is reinforced by the need to minimize the amount of computations of
at each step
. However, explicit methods may be more sensitive to the high integration step. On the other hand, an implicit method requires iterations to obtain the result in the integration step itself and admits a large time-step. In one way or another, the goal is to minimize performing LU factorizations until the final result at
is reached, as these factorizations require the highest computational costs. In explicit methods of the FE and RK2 types, at least 1 LU factorization is performed to obtain the result in one step. In the implicit BE method, only 1 LU iteration is proposed to be used in this work to obtain the result. However, this approach yields an approximate result for the step due to the need for more iterations to achieve high precision. It is suggested that the results of the homotopy problem at step
in this work may be inaccurate with respect to the error requirements needed for the PFP, based on the characteristics of the methods. The result obtained from the integration process is only considered to be a rough estimate of the exact solution to the load flow problem. Hence, a conventional method such as NR or its fast decoupled form, FDXB (see [
1,
30] for details of the decoupled method), is a good approach to improve the solution obtained from dynamic homotopy.
Therefore, a compromise must be sought between the expected result at the end of the dynamic homotopy simulation horizon and the expected accuracy of the PFP solution. Considering that it is not reasonable to use an exaggerated number of time-steps in the simulation because the dynamic homotopy process would be very computationally expensive, an alternative would provide an approximation of the result in time . However, at this point, an approximate solution for the states may be unaccepted and would need to be refined. In simpler terms, in this scenario, the homotopy method changes the initial estimate to a new state . The transformed state is expected to be within an attraction region and should give a good starting point for convergence, even for a numerical method like the classical NR and FDXB methods.
The idea is to use the dynamic homotopy method to determine an approximate solution for the PFP, starting from a flat start estimate, equivalent to an improvement in the region of attraction in the original problem. From this result, the PFP solution can be calculated with high precision. Furthermore, this new starting point, , can be used by other iterative techniques different from the traditional NR.
3.3. A Generic Tutorial Example
To better understand the application of the concepts, we first examine a tutorial example from [
29] before applying the details to large-scale ill-conditioned power system models. The problem consists of finding the roots of the nonlinear equation generic system represented by
,
,
, and
.
In order to iteratively solve the system, an initial estimate
is assigned. Note that at this point, the Jacobian matrix is singular. However, in the neighborhood of
, the singularity disappears for other points. Then, to eliminate the singularity at
, it was proposed in [
29] to replace one of the variable values with the same value incremented by a small value
, for example,
. The Newton-Raphson solver has been found to not converge without the added perturbation. Additionally, achieving convergence may be difficult depending on the specific value of
. However, the dynamic homotopy-based technique addresses this issue by incorporating the explicit and implicit integration methods we have previously discussed, along with any necessary adjustments.
Two different approaches were used for simulations: one using only the classical Newton-Raphson (NR) scheme, starting from ; and the another using a combination of the dynamic homotopy-based method and the NR solver. By this latter, the NR solver uses as the initial guess, which was obtained previously by a dynamic homotopy numerical scheme.
When the NR is used starting directly from , it was investigated with different values of to modify only the entry .
In the hybrid approach, an integration method is initially used to calculate a partial result at , generating . This partial result is used as a guess for the classical NR solver to compute the high-accuracy solution .
The integration methods FE, BE, and RK2, were used as proposed previously. In all dynamic homotopy simulations, the initial time step
t
0 = 0.01 produces the first step
. The subsequent steps
,
were determined by a constant time step, denoted as
. Two different types of simulations were run with constant values for
: 0.5 and 0.125. In addition, the value of
K was varied, with the following values: 0.005, 0.01, and 0.05. For all simulations using dynamic homotopy, the results were initially computed at time
using only the BE solver, or equivalently, by using the linear approximation for the static homotopy equation. Then, the states obtained at time
were used as the starting point for the FE, BE, and RK2 numerical integration solvers for
,
with a given
. The
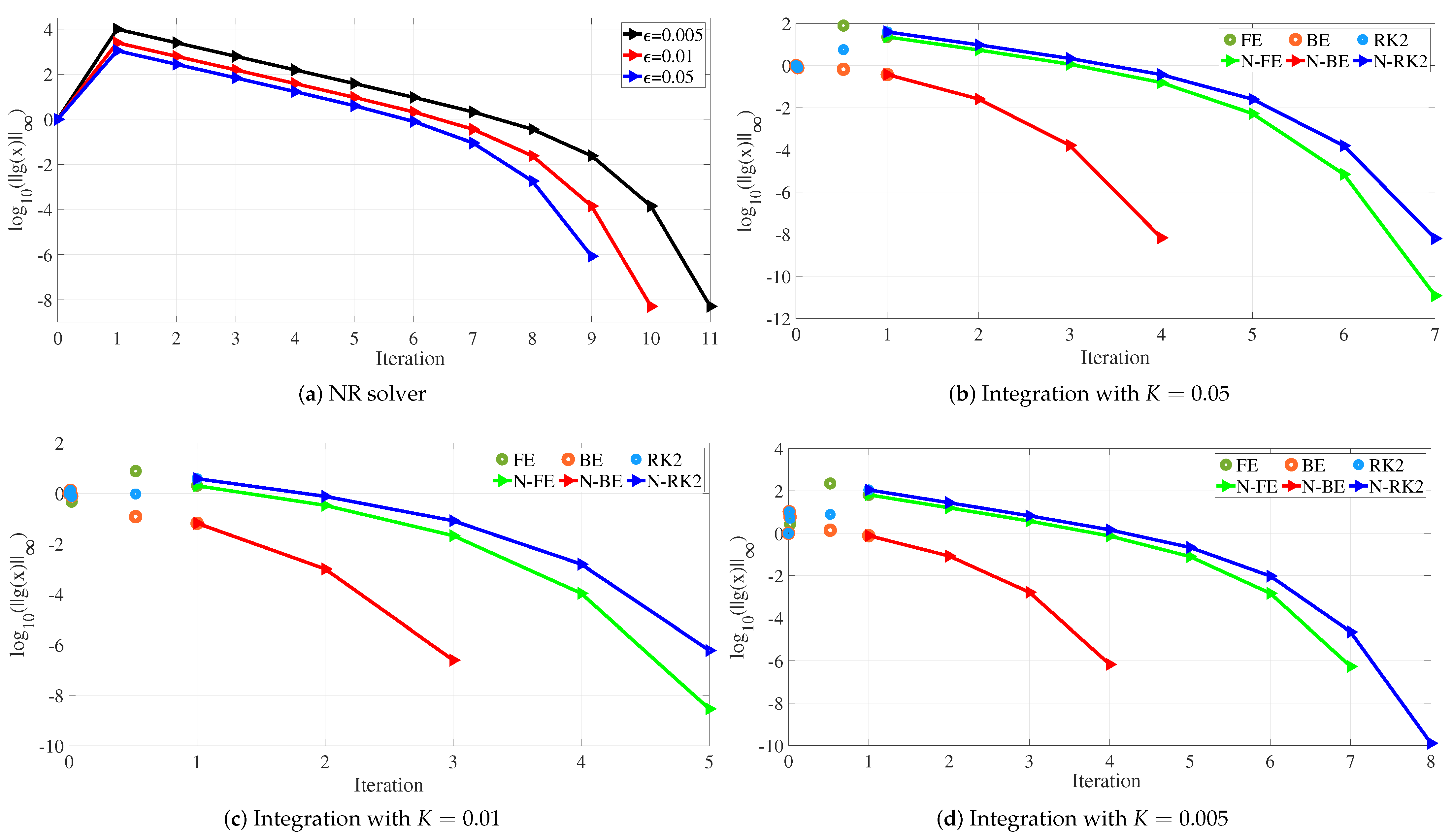
Figure 1 illustrates the mismatch plots for the simulations. In
Figure 1a, the plots for results were obtained using only the NR solver, while the other subfigures exhibit the plot visualizations for the hybrid approach, considering constant step-time
. Convergence was achieved for all simulations and, after using the NR solver, reached the refined values
and
with a tolerance for the mismatch of
.
The analysis of the results shows that when the NR solver departs directly from the original estimate
with
, the mismatches initially experience a sudden increase for any perturbation value
, and then gradually decrease with each iteration. A minimum of 9 to 11 iterations were necessary to achieve a tolerance of
in these experiments. In the hybrid approach (refer to
Figure 1b–d)), the NR solver utilizes the result obtained for the point when
. The discrete intermediate points in the plots for the range 0 to 1 refer to results obtained from the dynamic homotopy solvers. With the enhancements introduced by the homotopy solvers, the Newton-Raphson solver exhibits improved convergence behavior, consistently achieving convergence within a maximum of 8 iterations across a range of values for the parameter
K. This enhanced performance is observed when the NR solver is utilized in conjunction with the Forward Euler (FE), Backward Euler (BE), and RK2 solvers. In all cases, the best performance was observed with the BE (implicit form) solver, which required no more than 3 iterations to reach a solution. The explicit forms (FE and RK2) also achieved the solution with fewer iterations than the NR solver properly when starting directly from
.
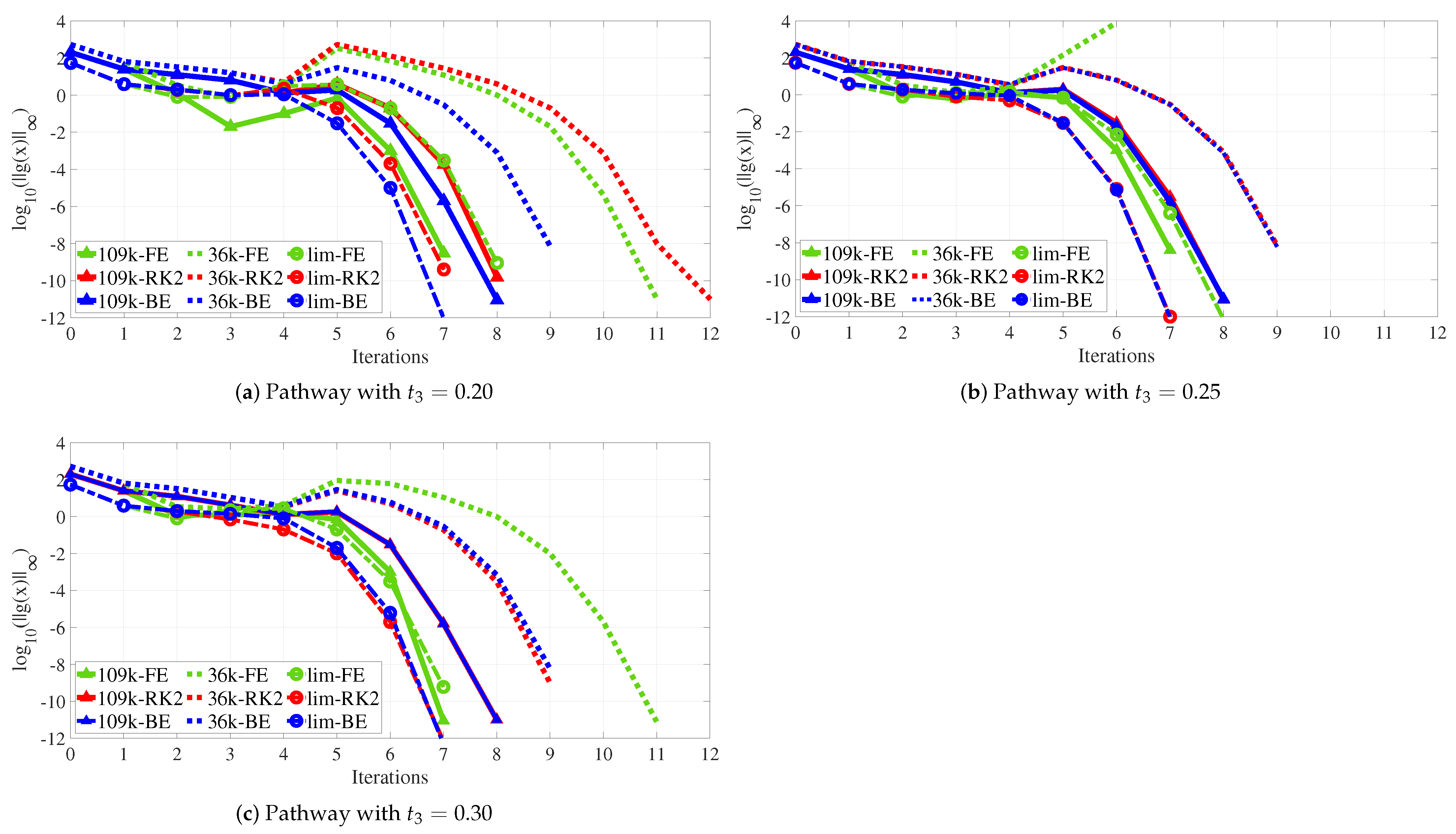
Another set of experiments was accomplished to verify the influence of the time-step
, keeping the same step initial,
, and using
. For this case, a constant value
was set. The
Figure 2 depicts plots for the hybrid approach involving the experiments.
From
Figure 2, we can confirm that the behavior observed in the results shown in
Figure 1 was maintained. However, the explicit solvers now require fewer iterations to achieve a highly accurate solution using the Newton-Raphson method. The backward Euler solver did not show a significant improvement compared to its performance with a high time-step size, but it still outperformed the other dynamic homotopy solvers.
The upcoming section discusses experiments and results on various poorly conditioned large-scale power system models. The goal is to show how effective the proposed method is in accurately finding the solution of the PFP by utilizing the desired performance of the dynamic homotopy-based technique.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}