1. Introduction
In recent years, the rise in energy consumption has underscored the importance of renewable energy, and technologies like photovoltaic and wind power have seen rapid development. In renewable energy power generation, the inverter is an important device between green energy sources and the power grid [
1,
2]. Filters are often employed to remove high-order harmonics, improving the grid-connected current quality. LCL-type filters surpass L-type and LC-type filters in being smaller in size and more effective in filtering [
3,
4]. However, LCL filters have resonance problems, which may impact the internal stability of the system.
Current strategies to suppress resonance in LCL-type inverters are classified as the passive damping method [
5], active damping method [
6], and the step-down method [
7,
8]. Reference [
5] introduced a passive damping technique by placing a resistor in series with the filter capacitor. This approach diminishes resonance peaks and boosts stability; however, employing passive damping leads to higher system losses. Reference [
6] proposed the capacitor current feedback method, offering high efficiency and straightforward implementation, but control delays can alter the introduced virtual impedance. The reduced-order methods include the split capacitance method [
7] and the WACC method [
8], which are essentially designed for the control link so that the zero-poles in the system are canceled, making the system first-order. In contrast, WACC provides the benefits of easy parameter setting and increased control bandwidth. Although the above control methods have a good resonance suppression effect, the impact of variations in filter parameters on the control strategy has not been taken into account.
Since the grid-connected inverter with filter parameter perturbation is a nonlinear system, nonlinear control strategies for grid-connected inverters, including model predictive control, backstepping control, and fuzzy control, have been widely studied [
9,
10,
11]. Sliding mode control (SMC), a type of nonlinear control, allows the state trajectory to be designed in advance based on desired dynamic characteristics and remains unaffected by object parameters and disturbances. With strong robustness to parameter uncertainty and external disturbances, it has been widely used in grid-connected inverters [
12,
13,
14]. Reference [
15] introduced a sliding mode approach for LCL-type inverters, using the grid-connected current error, its derivative, and its second derivative to create a sliding mode surface for controlling the incoming current. In order to resist external interference and parameter mismatch, a large switching gain is adopted. Increasing the switching gain can result in more severe chattering, and the design of the third-order controller is complex, and only asymptotic stability over infinite time can be achieved. Reference [
16] applied the fractional-order smooth mode surface and fractional-order convergence law to LCL-type inverters, which can significantly suppress the jittering phenomenon. However, the controller still has the problem of complex controller design and the asymptotic stability over infinite time. In Reference [
17], fractional-order sliding mode control and fuzzy control are combined and applied to LCL-type grid-connected inverters to further reduce chattering in sliding mode control. However, fuzzy control depends on the experience of designers. The fuzzy processing of simple information will lead to the reduction in the control accuracy of the system, and there are still problems of complex controller design and asymptotic stability over infinite time.
Although the control strategies mentioned in the above literature enhance the grid-connected inverter’s performance to some degree, they all only ensure the asymptotic stability of the grid-connected inverter. When the grid-connected inverter is disturbed or the reference value of the incoming current is changed, the system requires good dynamic performance to achieve a steady state promptly; otherwise, it could significantly affect safe and stable operation. Thus, control strategies with rapid convergence and adjustable finite convergence times are better suited for grid-connected inverter systems [
18,
19].
Numerous finite-time control techniques have been developed to guarantee the finite-time stability of nonlinear systems [
20,
21]. In reference [
20], the LCL-type grid-connected inverter is controlled by using the combination of Kalman filter technology and finite-time sliding mode control to make the system converge in finite time. At the same time, the Kalman technology is used to estimate the measurement variables to improve the robustness of the system. However, the Kalman filter control technology has the high computational complexity of high-dimensional systems, which will make the design process of the overall controller more complicated. In reference [
21], a method combining finite-time sliding mode control and passivity-based control is proposed to control LCL-type grid-connected inverters to ensure that the grid-connected current can be stable in finite time and further enhance the robustness of the system. However, passivity-based control involves complex mathematical derivation and energy function design. Combined with the third-order model of the LCL, the design process will also be more complicated. In addition, under the finite-time control strategy presented in the literature [
20,
21], the maximum system convergence time is influenced by its starting conditions. If these initial conditions are unknown beforehand, the exact upper limit for convergence time is indeterminable. To enhance the aforementioned control strategies, the concept of fixed-time stabilization independent of the initial operating state of the system has been introduced in the literature [
22,
23]. Reference [
22] proposed to apply the fixed-time backstepping control strategy to the LC-type island inverter. The fixed-time backstepping controller can track the load voltage to the reference voltage within a fixed time, so that the upper limit of the system convergence time is independent of the initial state of the system, and the dynamic characteristics of the system are improved. However, the backstepping control needs to introduce new virtual control variables in the recursive design. This recursive design is limited by the computing power when it comes to advanced systems, and the backstepping control depends on the mathematical model of the system. If the system model is inaccurate, the control performance will be significantly reduced. Reference [
23] proposed to apply the fixed-time sliding mode control strategy to the grid-connected inverter with an RL-type filter. This control strategy can make the grid current track the reference current in a fixed time, so that the upper limit of the system convergence time is independent of the initial state of the system, and the dynamic performance of the system is improved. However, the filtering effect of an RL-type filter is worse than that of an LCL-type filter, and the harmonic content is higher.
Inspired by the above research, an improved sliding mode control strategy based on weighted current and a disturbance observer is proposed to solve the problem of the large calculation and slow convergence speed of an FOSMC in a traditional LCL inverter. The proposed controller has the following advantages in control:
- (1)
WACC can reduce the LCL of the third-order system to a first-order system, so as to simplify the mathematical model, reduce the difficulty of controller design, and avoid multiple differential links of the measurement variables.
- (2)
FTDO can estimate and compensate unknown disturbances caused by filter changes in a fixed time, improve the accuracy of weighted current after WACC, and enhance the anti-interference ability of the system to filter parameter changes and external disturbances.
- (3)
FTFOSMC enables the system to quickly adapt to changes in the reference value within a fixed time. The upper limit of the stabilization time is independent of the initial state, which improves the dynamic performance of the system. In addition, FTFOSMC can effectively reduce the chattering through the fractional differential operator, so that the controller can maintain good performance and more stable operation.
3. Design and Analysis of Improved Control Strategy
3.1. Important Definitions and Lemmas
Definition 1 ([
26,
27])
. Fractional calculus is usually defined in three different ways: the Caputo type, the Riemann–Liouville type, and the Grunwald–Letnikov type. Since the definition of initial conditions and the initial conditions of Caputo-type fractional calculus are consistent with those of integer-order calculus, in recent years, it has seen extensive application.Definition: f(
t)
is a continuous integrable function, and its Caputo-type fractional calculus is defined as below:where is the smallest integer not less than ; is the gamma function; and represents the differential in the traditional sense. can be any real number, , represents a fractional differential; , which represents the fractional integral on the interval . The fractional differential is transformed into an integral operation of its characteristic form, so it has a certain memory effect. Lemma 1 ([
28,
29])
. Consider as a smooth function where . Provided that the subsequent inequality is satisfied,where , , , , and are positive real numbers. The system described by Equation (10) will reach the stable region within a fixed time, with the upper bound of this time being independent of the initial state. The upper bound is given by 3.2. Design and Analysis of WACC
The WACC belongs to the active damping control strategy. By computing the weighted average of the inverter output current
and the grid current
, the virtual grid current
is obtained, and the goal of tracking the grid current reference value
is achieved. Let
,
, and
, then the value of
can be expressed as
Among them,
is the weighted average current;
.
,
are the weight coefficients of
and
, respectively, and
is a constant ranging from 0 to 1. When
, the third-order system of Equation (14) can be reduced to the first-order system of Equation (15):
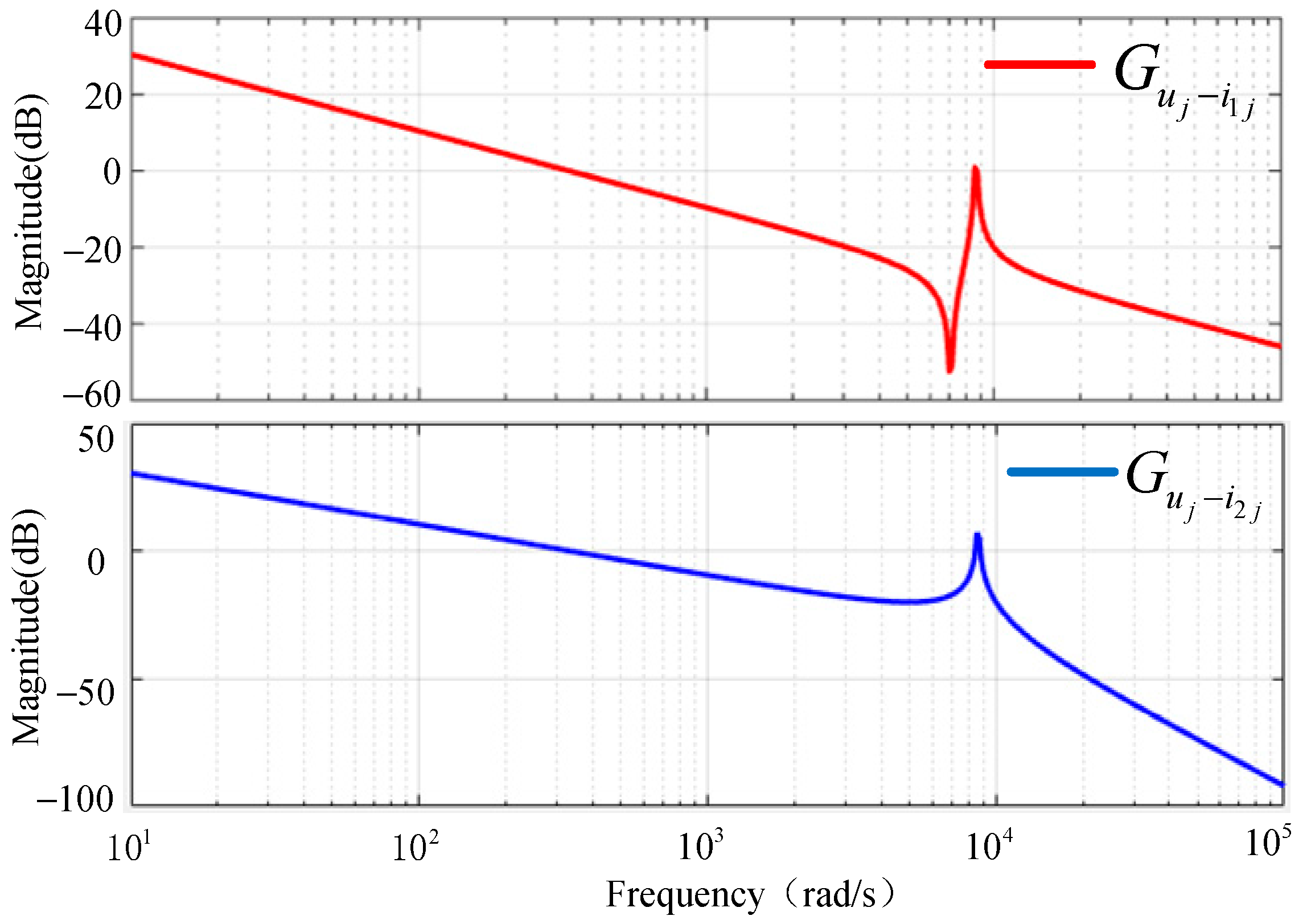
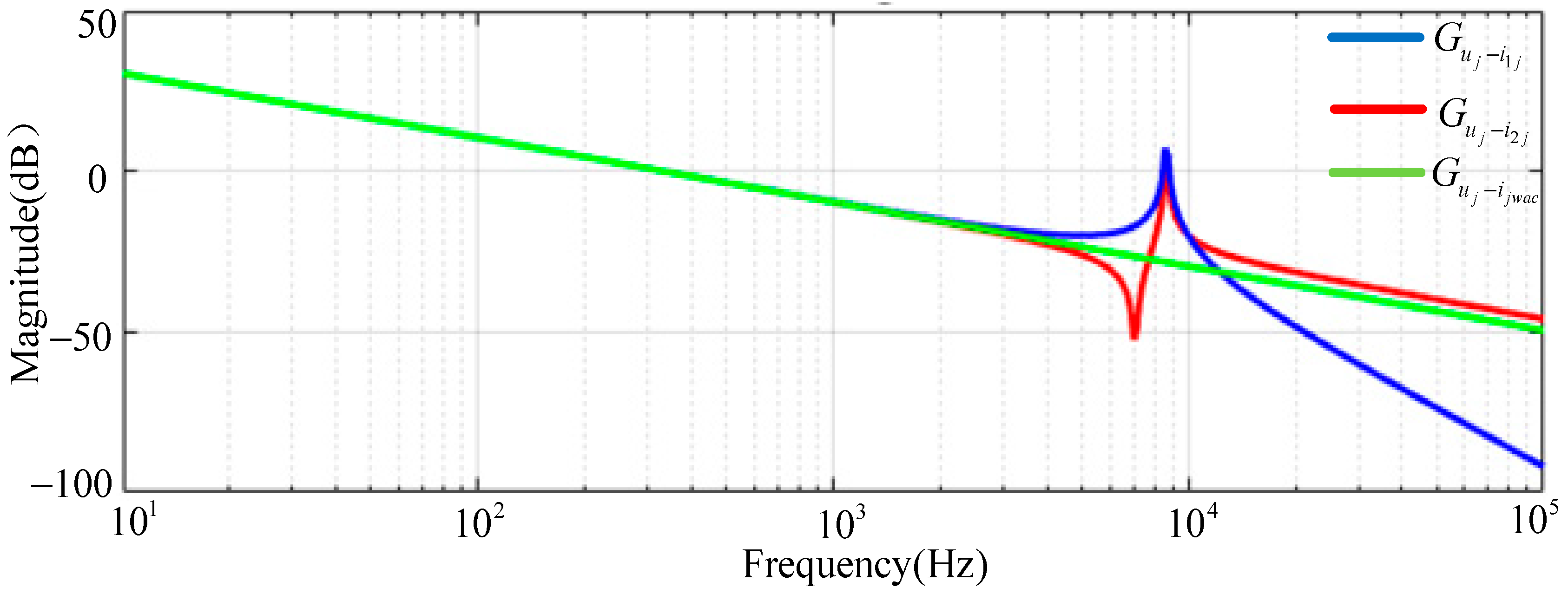
When implementing WACC for the LCL inverter,
Figure 3 is the amplitude–frequency characteristic curve of the transfer function of Equations (2), (3), and (15), and the parameters of the transfer function are shown in
Table 1. This shows that the system is reduced to first-order, effectively suppressing resonance.
After order reduction, the mathematical model of the system is as follows:
3.3. Design of FTDO
During grid-connected operation, the filter inductances
and
are easily influenced by temperature, humidity, and other factors. Filter inductors
and
will affect the accuracy of
, which will affect the stable operation of the inverter. Since the size changes of
and
are bounded, it is assumed that the change in impedance
after the weighted current is
due to the change in
and
, and there is an upper bound of
. At this time, in the equivalent first-order system, the filter inductance is
Assuming that the disturbance caused by the change in
and
to
is
, the weighted average current containing the parameter disturbance term is
By substituting Equation (18) into Equation (16) and simplifying it, the mathematical model of the system considering filtering parameters is obtained:
Here,
is the influence of parameter change on the weighted current derivative. Since the parameter variation is bounded, disturbance
is bounded. The sum of the perturbations
and
is regarded as the total perturbation, and the total perturbation is bounded. Combined with Equation (19), the corresponding system’s state Equation is summarized as follows:
Here, , , and .
In order to quickly estimate the disturbance caused by the filter parameter perturbation in a fixed time, the FTDO is designed to estimate the disturbance term in (20). The design steps of the FTDO are as follows:
Firstly, the auxiliary variable
is introduced, then Equation (20) can be rewritten as
Among these variables,
is a normal number. Auxiliary variables are introduced:
The observer estimation error is defined as
, and further:
Define
and
as the estimation and observation errors of
, respectively, which can be
Here, ; is the sign function.
Inspired by the literature [
28,
30], the fixed design observer is designed as follows:
where
,
,
,
,
, and
.
The fixed-time observer is designed as Equation (25), and the estimation error of the total disturbance will converge to zero within a fixed time .
Proof 1. Select the Lyapunov function as follows:
Now let
,
, and
, and, with the derivation of
, obtain the following:
Based on Lemma 1, when
, the observation error
will converge to 0, and
can be calculated as follows:
The size of is determined by , , , and .
According to Equation (23), the estimation error of the disturbance is
:
Therefore, the FTDO can estimate the unknown disturbance
within a fixed time
, and the estimation error
converges to zero. When
,
□
3.4. Design of FTFOSMC
The design steps for the proposed FTFOSMC are outlined below:
Firstly, the grid current reference is set to
, and the error between the virtual grid current and reference grid currents is defined as
The error is derived and (20) is simplified to obtain
Then, using the characteristics of fractional calculus, specifically how the energy transfer is slow and can effectively alleviate the chattering, by introducing the fractional calculus operator in the sliding mode control, the fractional fixed-time nonsingular terminal sliding mode surface is selected as follows:
Here, is the fractional order, and are positive numbers, , and .
From Equation (33), the derivative of
is derived as follows:
To ensure the system state quickly reaches the sliding mode surface in a fixed time, the designed fixed-time reaching law is as follows:
Among these,
and
are normal numbers. After the disturbance is estimated by the FTDO, the disturbance is estimated and compensated for in the fixed-time sliding mode controller. Combined with (30), (34), and (35), the modulation signal input
of the inverter can be obtained. The control input is as follows:
Through the comparison of three aspects, it can be proved that the proposed control strategy can reduce the amount of calculation. First of all, through the analysis of the required control information of the traditional FOSMC and the proposed FTFOSMC, the traditional FOSMC needs to measure the capacitor voltage, the grid-side current, and the grid voltage, while the FTFOSMC needs to measure the inverter-side current, the grid-side current, and the grid voltage. The amount of information required by the two is the same; secondly, in terms of computational complexity, the traditional FOSMC needs to obtain the third derivative of the grid current, which needs to be solved by simultaneous equations many times. However, FTFOSMC indirectly controls the current of WACC, and its system equation has become first-order, which does not need to be solved, greatly simplifying the computational complexity. Finally, by directly comparing the control input of the inverter as in Equations (9) and (36), it can be seen that the control input signal of the inverter obtained by the proposed control strategy is simpler. The derivation link only has one derivation of the reference current, and does not contain the derivation link of the measurement variable, which avoids the multiple differentiation of the measurement, and the proposed control strategy can also suppress the influence of the change in the filter inductance parameters and improve the anti-interference ability of the proposed control strategy.
3.5. Analysis of Fixed-Time Stability
Proof 2. The approach motion converges from the initial point to the sliding surface in a fixed time.
The following positive definite Lyapunov function is set:
The derivation of
is as follows:
Now let
,
, and
; for the derivation of
, one obtains
Based on Lemma 1, the tracking sliding surface error can be stabilized within a small vicinity of
within a fixed time
, independent of initial conditions; the maximum stabilization time is as follows:
The size of is determined by , , , and . □
Proof 3. After reaching the sliding mode surface, the tracking error
of the grid-side current can move along the sliding mode surface to a tiny region around the equilibrium point within a fixed time
. At this time,
, and according to Equation (33), the following is obtained:
The Lyapunov function is written for the process from the sliding surface to the stable equilibrium point; the following positive definite Lyapunov function is set:
Now let
,
, and
; for the derivation of
, one obtains the following:
Based on Lemma 1, the tracking current error stabilizes near the origin within a fixed time
, irrespective of the initial conditions. The maximum stabilization time is as follows:
The size of is determined by , , , and .
In summary, the system stabilizes within a fixed time , with the upper limit for the entire grid-connected inverter system being . In order to make stable within 0.01 s, , , and can adjust their corresponding four parameters to determine their upper limits, so that the upper limit of the stability time corresponding to each segment is within 0.003 s. □
3.6. Overview of the Control Block Diagram
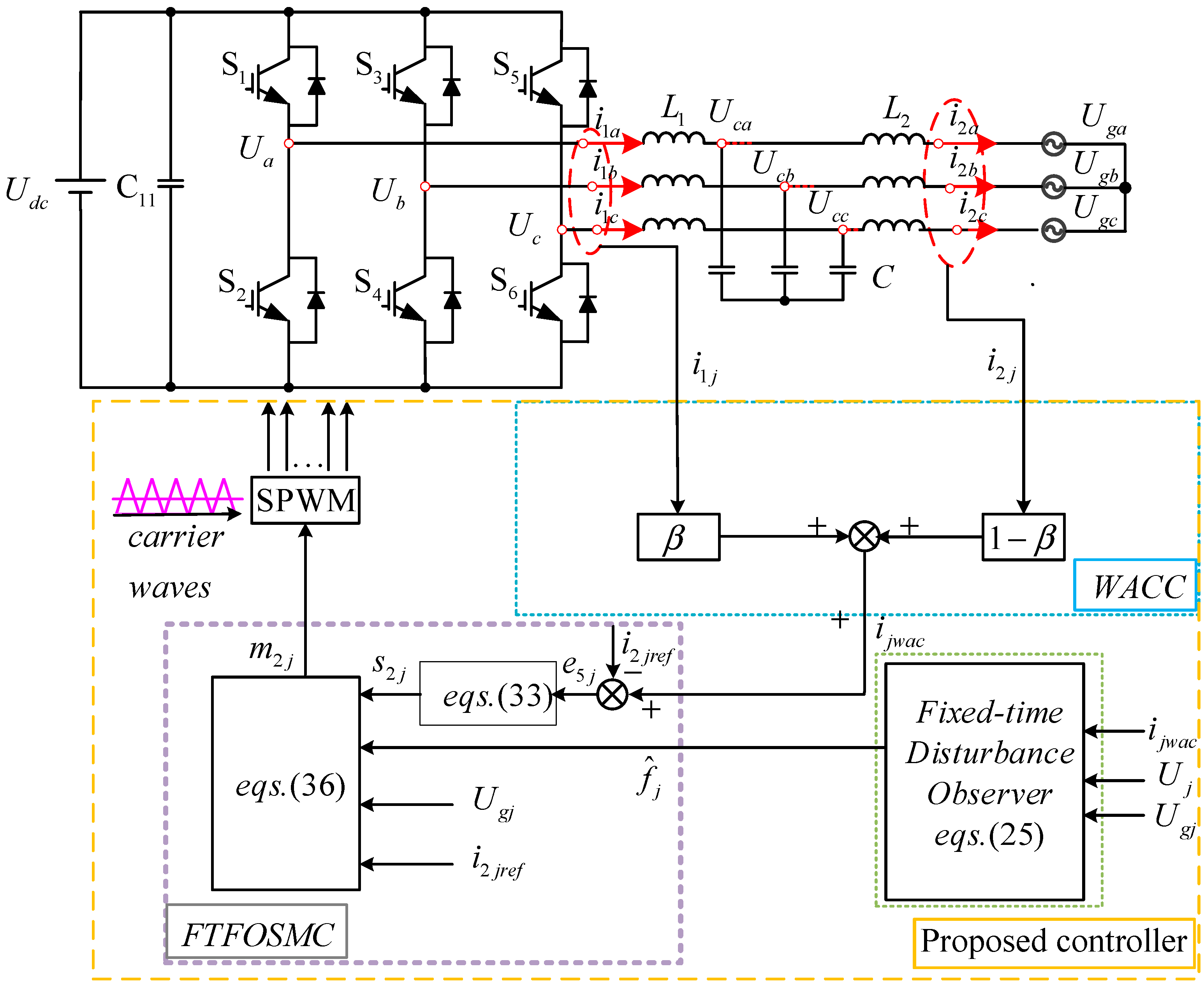
Figure 4 illustrates the overall structure of the proposed control strategy. As illustrated in
Figure 4, after applying WACC,
is derived from the currents on the grid-connected inverter side and the grid side. The difference between the current after the WACC and the reference current can be used to construct the fractional-order sliding mode surface. Through the FTDO, the estimated value of the disturbance caused by the filter parameter perturbation to the system can be obtained, which is compensated in the control input and improves the robustness of the system. Then, the FTFOSMC is employed for the fast tracking of the grid-connected current in a fixed time, enhancing the inverter’s dynamic performance.
5. Conclusions
This paper focuses on the LCL inverter. To address the high computational load and slow convergence of the traditional FOSMC strategy for LCL grid-connected inverters, a fixed-time robust fractional-order sliding mode controller based on weighted current control is proposed. The contribution of this method is that, firstly, the controller design is simplified from the third-order system to the first-order system by WACC, which reduces the computational complexity. When using WACC, it is necessary to accurately know the inductance parameters of the filter. If the inductance values of the inverter side and the grid side are not accurate, the calculated weighting coefficient cannot obtain the optimal value; moreover, FTDO can quickly estimate and compensate the system interference, and enhance the anti-interference ability of the system. At the same time, the FTFOSMC strategy is applied to output the control modulation signal, which improves the dynamic performance of the system. The simulation and experimental results show that the control strategy has good anti-interference ability when the filter parameters change. When the reference current or grid voltage changes, the three-phase grid-connected inverter can quickly track the new reference value and show better dynamic performance.
The current research only focuses on a single grid-connected inverter, and future research can consider extending FTDO and FTFOSMC to the scenario of parallel inverters. In the case of multiple inverters in parallel, there may be coupling between the output of each inverter and the adjacent inverters, which affects the stability of the overall system. In order to solve this problem, FTDO can be used to quickly detect and compensate the cross-interference between parallel inverters, and FTFOSMC is used to design a global coordinated control strategy to ensure that parallel inverters can maintain efficient and stable operation under various operating conditions. The expansion of this method may help to improve the overall performance and reliability of the inverter parallel system, which is a main part of my future research.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}