1. Introduction
Electric Vehicles (EVs) are emerging as a rapidly advancing technology with global significance, driven by concerns over fossil fuel scarcity and environmental pollution. The extensive acceptance of EVs is hindered by the limited driving mileage of EVs, long charging duration, and lack of adequate charging arrangements, which is posing a challenge for EV users [
1]. In this context, Ultra-fast charging stations are crucial for the widespread adoption of EVs due to their ability to provide a rapid charging experience comparable to the quick refueling process at gas stations [
2]. One of the primary barriers to EV adoption has been the lengthy charging times compared to the few minutes it takes to refuel a conventional vehicle [
3]. Ultra-fast chargers address this issue by significantly reducing charging times, making EV use more convenient and practical for everyday drivers. This is especially important for long-distance travel, where quick recharges are essential to maintain the continuity of trips without lengthy delays [
3]. Governments worldwide are actively promoting the use of EVs and encouraging the establishment of public CSs. To ensure the success of this initiative, effective EV CS planning is necessary, which involves the careful selection of CS locations, as well as the determination of the adequate number of chargers that can be present in each CS [
4]. The planning should be done in such a way that enhances user convenience, reduces concerns about vehicle range, integrates EVs into daily life, increases station utilization, and contributes to sustainable transportation solutions.
The CS cannot be placed arbitrarily or in every node of the electrical network as it can violate the power system constraints and increase the risk of grid overload [
5]. The location of the CS should be determined wisely so that all areas of the network can be properly covered by placing the appropriate number of CSs. The determination of the superior number of chargers in a CS is also an important factor to look into because a huge number of chargers may also lead to power quality problems, voltage degradation, and increased power losses. On the other hand, an insufficient number of chargers may increase the station congestion and waiting time of the users [
6]. Strategic placement of ultra-fast charging stations with a sufficient number of chargers allows substantial energy delivery in a short time, facilitating continuous travel and reducing extended stops. This enhances the overall travel experience and makes EVs more viable for long-haul journeys, encouraging more drivers to switch from gasoline vehicles to electric ones [
7].
The planning of EVCSs is influenced by several uncertain factors, such as variable EV charging demand, variation in charging time, unpredictable user behavior, fluctuating energy prices, etc. To handle this, uncertainty modeling is essential during the planning of ultra-fast EVCSs as it helps in making accurate decisions [
8]. In this context, multi-scenario planning is advantageous because it considers multiple scenarios of uncertain parameters, capturing the intermittent nature of variables. This approach reduces the burden and complexity of the program by providing a definite range of data points that represent the actual data more accurately [
9]. By incorporating a range of potential outcomes, multi-scenario planning ensures that strategies are more resilient and better prepared to handle variability and uncertainty. Besides this, considering yearly EV growth and system load growth is crucial for planning charging stations to ensure the infrastructure can meet future demand [
10]. As EV numbers increase, the need for more charging stations rises, while system load growth affects overall energy demand. Planning with these factors in mind ensures that the charging network remains efficient and capable of handling future requirements, supporting both EV adoption and commercial energy needs.
Although the advantages of ultra-fast charging stations are well-recognized, there is a notable scarcity of research focused on their planning from a power system operational standpoint as well as a CS owner’s standpoint [
7]. Existing studies primarily highlight the benefits of ultra-fast charging in terms of reducing charging time and supporting EV adoption, but they often do not address the planning aspects related to station location, sizing, and impact analysis in terms of cost-benefit evaluation and emission analysis [
11,
12]. Addressing this gap is crucial, as a comprehensive understanding of these factors can significantly enhance the effectiveness and efficiency of ultra-fast charging infrastructure. In [
13], the authors analyzed the impacts of ultra-fast charging stations on distribution networks (DN) in terms of voltage profile and current trends. In [
8,
14,
15], the authors considered travel distance and arrival State of Charge (SOC) as uncertain parameters, while in [
16], battery SOC and battery capacity were considered uncertain variables during the planning process. However, for robust planning, all the possible uncertain parameters should be taken into account, which is largely missing in previous studies. Again, in [
14,
17,
18], the authors used a scenario generation technique, the Monte Carlo Simulation method, to handle the uncertainty, which generates a huge number of scenarios leading to computational inaccuracy. In contrast, the 2m-Point Estimate Method (2m-PEM) is more efficient for scenario generation as it gives accurate results, is more stable, and is less sensitive to the sample size [
8]. Therefore, in the current study, the 2m-PEM is adopted to handle different uncertainties related to EVCS planning, such as vehicle driving distance, battery SOC, battery capacity, charging time, and varying electricity prices. In [
19], the authors minimized the power loss, voltage profile degradation, and installation cost of the CS while determining the optimal size of the CS. Additionally, locations of the CSs were obtained to use the Balance Mayfly Algorithm. In [
20,
21], the authors identified the location of the CS using PSO and Grey Wolf Optimization techniques while minimizing the power loss of the network. The authors of [
22,
23,
24] addressed the benefits only from the CS owner’s point of view by minimizing installation and operational costs during the planning of CS.
From the literature, it is evident that, in some papers, researchers had addressed the advantages from the CS owner’s point of view while some authors had addressed the Distribution Network Operator’s (DNO’s) aspects. However, for comprehensive EVCS planning, it is crucial to consider all the objective functions like voltage profile, power loss, and costs related to CSs in terms of installation and operational costs. This will ensure benefits to both CS owners and DNOs. In [
25,
26,
27,
28,
29,
30], the authors identified the location for the CS placement using several optimization techniques like the Arithmetic Optimization Algorithm, PSO, Teaching Learning Based Optimization, and Grey Wolf Optimization algorithm. The results reveal that CSs are often placed on consecutive buses, leaving the majority of the network uncovered. However, for superior EV user services, CSs should not be concentrated in one place. Rather, they should be placed in a distributed manner to cover the whole network. Therefore, in the proposed planning, the CSs are allocated strategically throughout the planning area to reduce the range anxiety of the EV users. On the other hand, in previous research [
22,
23,
24,
25,
29,
30], the authors did not account for the EV growth and system load growth of the system during the planning of charging stations. However, this integration is essential for long-term planning to ensure that the infrastructure can accommodate future demands effectively, maintain grid stability, and support the sustainable expansion of the EV network. Soft computing algorithms are robust, adaptive in nature, and very efficient in handling the complexity of real-world problems. The authors of [
22,
24,
27,
31] used some traditional techniques like Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and Cuckoo Search Algorithm to determine the size of EVCSs. However, these techniques are often facing certain challenges like parameter tuning challenges, lower convergence rates, lack of robustness, etc. To mitigate these limitations, in the proposed planning model the optimal number of chargers is determined using the Harris Hawk Optimization (HHO) technique as it exhibits a balanced exploration and exploitation phase [
32]. In [
33,
34], the authors used several simulation tools like the CARLA simulator to model the realistic driver behavior.
Besides this, the impact analysis of the planning in terms of cost-benefit analysis and emission evaluation is also necessary to prove the superiority of the model [
7]. Cost-benefit analysis helps CS owners and DNOs to make informed decisions by comparing the financial costs and benefits associated with the CSs. This helps to determine whether the investments are economically viable or not [
35]. Meanwhile, emission evaluation is also crucial for assessing the environmental impact of EV infrastructure. Together, these analyses ensure that the planning is financially beneficial and environmentally sustainable, which is largely missing in the previous work [
36].
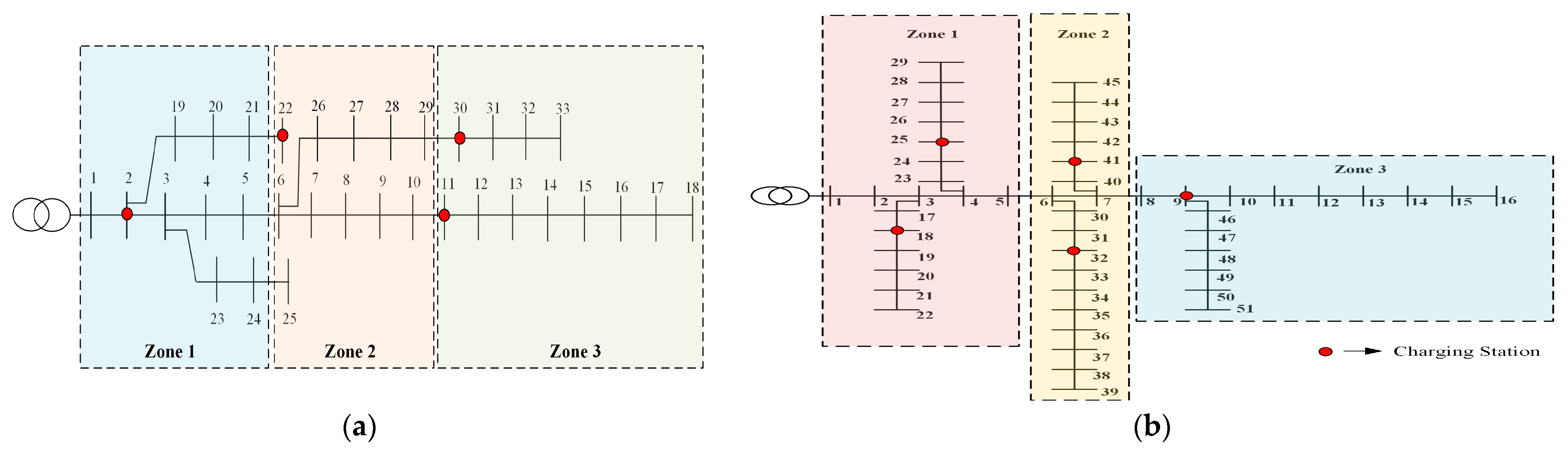
The research presented herein addresses a critical gap in the field of planning ultra-fast EVCS. To the best of the authors’ knowledge, the strategic multi-scenario-based planning of ultra-fast EVCSs has not been explored before from the perspective of CS owners, DNOs, and EV owners. In the present study, CS locations are identified using zonal division and the Voltage Stability Index (VSI) strategy to ensure an effective EV service by deploying the CS throughout the planning area. The overall work is tested on a 33-bus radial DN and a 51-bus real Indian rural DN [
37,
38]. The optimal number of chargers present in each CS is determined using the HHO technique while minimizing the installation, operational cost of the CS, and energy loss cost to provide advantages to the CS owners and DNOs. To handle the unpredictable EV charging behavior and fluctuating energy prices, the 2m-PEM is employed. For more practical analysis, new ultra-fast charging compatible vehicles available in India are used for the analysis. Further, an analysis of the revenue generated from selling electricity to EV users is conducted alongside a cost-benefit assessment to demonstrate the profitability of the proposed methodology. Additionally, to assess the social benefit, carbon emissions from both the EV and conventional vehicles are quantified.
The novelty of this research lies in its comprehensive approach, which not only considers the technical feasibility of ultra-fast CSs pertaining to voltage deviation, power loss, power flow constraints, etc., but also addresses economic and environmental aspects, which is crucial to CS owners and DNOs. Additionally, to alleviate range anxiety among EV users, a zonal division and VSI-based CS deployment strategy is adopted, featuring 150 kW ultra-fast chargers at all CSs. By highlighting this unexplored area, this research aims to pave the way for enhanced strategies that can empower DNOs to efficiently plan future power system networks. Moreover, a cost-benefit analysis is evaluated using the Return on Investment (ROI) index, which helps the CS owners determine the viability and profitability of their investments in the planning. Furthermore, ultra-fast chargers significantly enhance EV usability by reducing charging time, improving convenience for long-distance travel, and supporting high-demand scenarios such as peak travel times of EV users.
To address the research gap drawn from the literature survey, the main contributions of the research work are as follows:
- a.
Considering practical aspects like annual EV growth and system load growth, a comprehensive multi-scenario-based long-term planning model of EV ultra-fast CSs is developed, taking into account the techno-economic and social benefits of different stakeholders while satisfying power system security constraints;
- b.
To enhance the realism of the planning, uncertainty modeling is performed using real data of electricity prices and data related to new ultra-fast charging compatible EVs. To efficiently capture the intermittent nature of uncertain variables, multiple scenarios are generated using the 2m-PEM by employing the mean and standard deviation of a large dataset;
- c.
Considering the uncertain parameters, a unique objective function is formulated to minimize the installation cost, operational cost of CSs, and energy loss while determining the optimal number of ultra-fast chargers using the HHO technique. To evaluate the financial and environmental benefits of the planning, an ROI-based cost-benefit analysis and a carbon emissions assessment are conducted;
- d.
To reduce the range anxiety of the EV user, a zonal division and VSI-based strategical placement technique are adopted to deploy the ultra-fast CSs in a distributed manner across the entire planning area.
6. Harris Hawk Optimization Technique
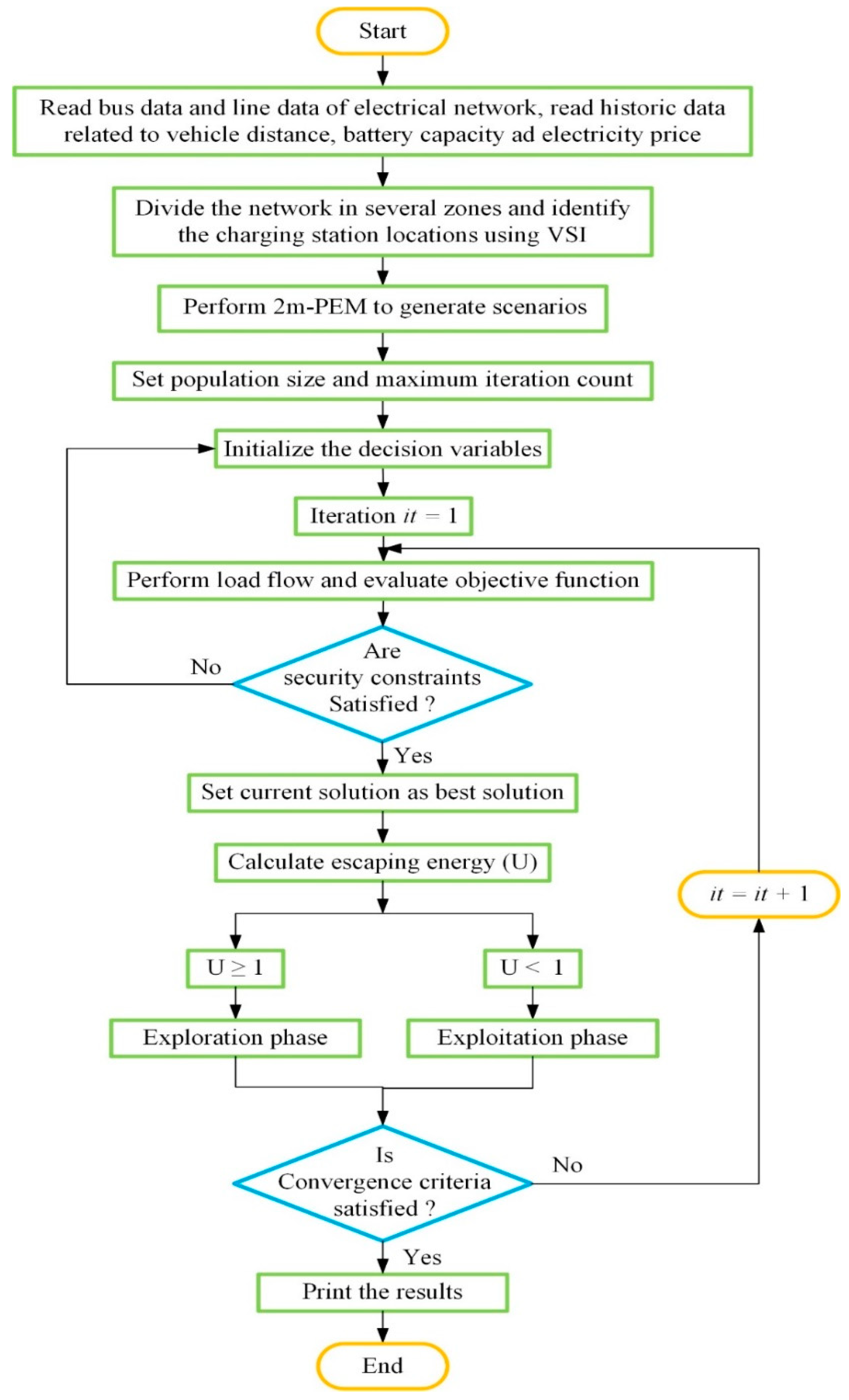
An effective optimization technique must be capable of modeling complex relationships while maintaining a proper balance between the exploration and exploitation phases. Failing to achieve this balance may result in the algorithm becoming trapped in local optima. With this approach in mind, the HHO technique is utilized to address the current multi-scenario planning problem. The conventional HHO technique is outlined below.
HHO is a nature-inspired, population-based optimization method. It draws inspiration from the hunting strategies and cooperative behaviors of Harris hawks [
32]. The algorithm finds the optimal solution through two main phases: exploration and exploitation.
The transition between the exploration phase and the exploitation phase depends on the value of escaping energy (
). The escaping energy is calculated as follows:
where
denotes the initial energy of the target and
and
represent the current and maximum number of iterations, respectively.
If , the algorithm shifts to the exploration phase; otherwise, it enters the exploitation phase.
Exploration phase: During this phase, hawks thoroughly explore the various locations based on the position of the other family member (
x ≥ 0.5) and based on the position of the target (
x < 0.5).
where
, and
indicate the current position, random position, and average position of hawks, respectively, and
refers to the position of the target or rabbit.
x,
are the random values between 0 and 1,
lb and
ub represent the lower and upper bound, respectively, and
T denotes the total number of hawks.
Exploitation phase: The exploitation phase takes place in four stages. The details of the stages are given below.
Soft besiege. This step is performed by the hawks when
r ≥ 0.5 and |
| ≥ 0.5.
where
indicates the jump strength of the rabbit and
r and
represents the random value between 0 and 1,
represents the difference in the position of the hawk and rabbit.
Hard besiege. The hawk performs hard besiege when
r ≥ 0.5 and |
| < 0.5.
Soft besiege with progressive rapid dives. This step occurs when |
| ≥ 0.5 and
r < 0.5.
At this stage, the HHO technique integrates the concept of levy flight (
) to mimic the zigzag deceptive movements observed in rabbits during their escape phase:
where
D refers to the dimension of the search space and
S refers to the random vector.
Hard besiege with progressive rapid dives. This step occurs when |
| < 0.5 and
r < 0.5.
The
can be calculated using (37):
where
u and
v are the random values between 0 and 1, and β is a constant whose value is set to 1.5 as given in [
32].
9. Conclusions
In the present research work, a comprehensive multi-scenario planning model for EV ultra-fast CSs is developed over a period of 10 years to provide benefits not only to the CS owners but also to the DNOs and EV owners. The proposed work aims to minimize the total cost in terms of installation, operational cost, and energy loss cost, utilizing the HHO technique while satisfying security constraints. To enhance the practicality of the modeling, the proposed planning incorporates the annual EV growth and annual system load growth. To make the analysis more realistic, this study is performed considering the uncertainties that are handled by 2m-PEM. Incorporating multiple scenarios into the planning process effectively addresses the uncertainties of varying parameters by capturing their intermittent nature and providing a more realistic representation of actual conditions. This method simplifies the program by offering a flexible framework that can adjust to different situations.
The research work is tested on 33-bus DN and 51-bus real Indian DN. The test results reveal that the CSs are strategically positioned during the planning phase with the help of the zonal division and the VSI, ensuring comprehensive coverage of the area. The zone-wise division allows for the allocation of CSs across the entire network. The VSI helps to identify suitable bus locations, avoid adjacent placements, and ensure healthier bus selections, which will enhance the EV user’s satisfaction.
Again, the HHO technique effectively identifies the optimal number of ultra-chargers with minimum installation, operational, and energy loss costs. To evaluate the financial and environmental benefits of the planning, a cost-benefit analysis in terms of an ROI index and a carbon emission analysis is performed, respectively. The result of the ROI shows that the proposed model is financially viable as the break-even point is achieved in a fifth of the planning period. The carbon emission analysis shows that adopting EVs could reduce environmental pollution by emitting 40% less carbon dioxide in the environment compared to conventional vehicles. Furthermore, the average daily capacity of each CS has been evaluated, and from the analysis, it is revealed that the proposed planning framework effectively meets EV charging needs while adhering to security constraints. However, a significant increase in EV charging demand could violate the power system security constraints. This situation may necessitate grid reinforcement to ensure system reliability and maintain secure operations. Overall, the conclusion can be drawn that VSI-based zone-wise allocation of ultra-fast CSs addressed the EV user’s need and optimized the installation, operational, and energy loss costs, effectively addressing the CS owner’s and DNO’s needs, respectively.
To prove the efficacy of the HHO technique, a comparative assessment was conducted, considering other existing algorithms. The results confirmed that the proposed algorithm is reliable and effective, excelling in convergence rate, computational efficiency, solution quality, and consistency. In the future, simulation tools such as GridLAB-D, OpenModelica, and PowerFactory will be utilized to model realistic EV driver behavior, traffic patterns, and routing. These simulations will provide insights into how varying user demands and vehicle flows are managed and can also assess the impact on the distribution network. Additionally, future work will involve implementing simulation components for modeling electric vehicles, vehicle usage, charging station infrastructure, and demand-side management using the aforementioned simulation tools.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}