

Research on the Control and Modulation Scheme for a Novel Five-Switch Current Source Inverter

Abstract
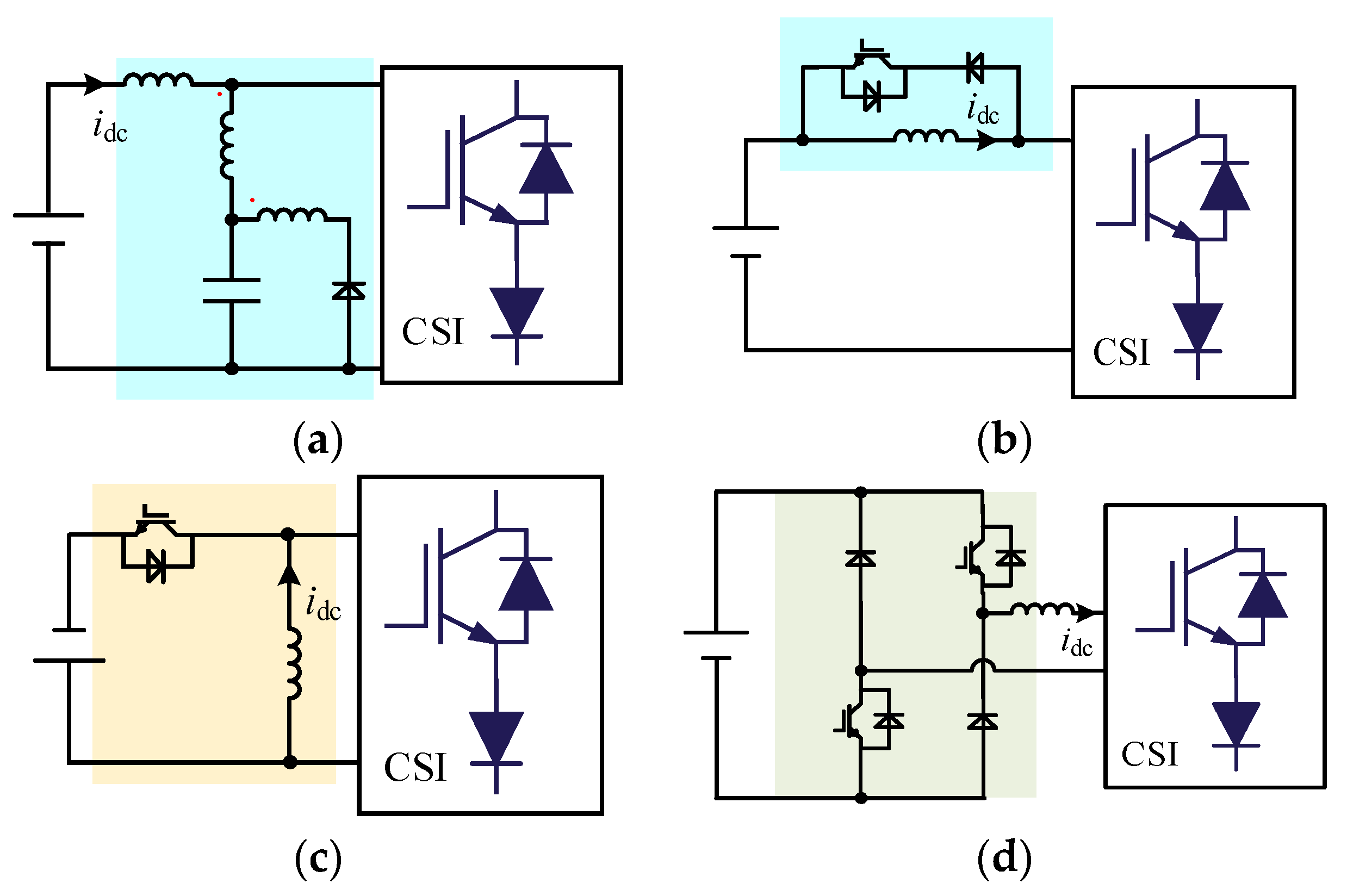
1. Introduction
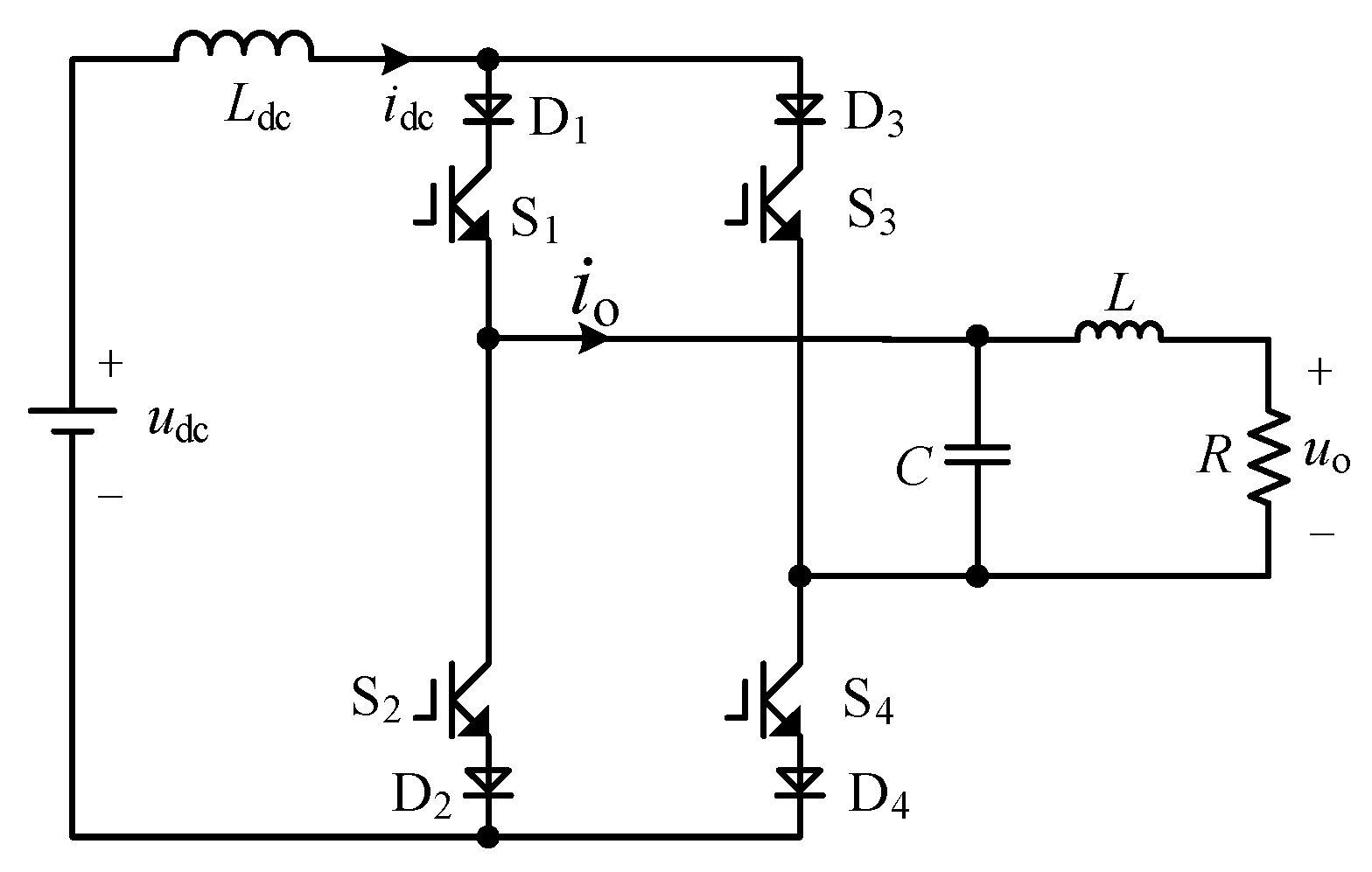
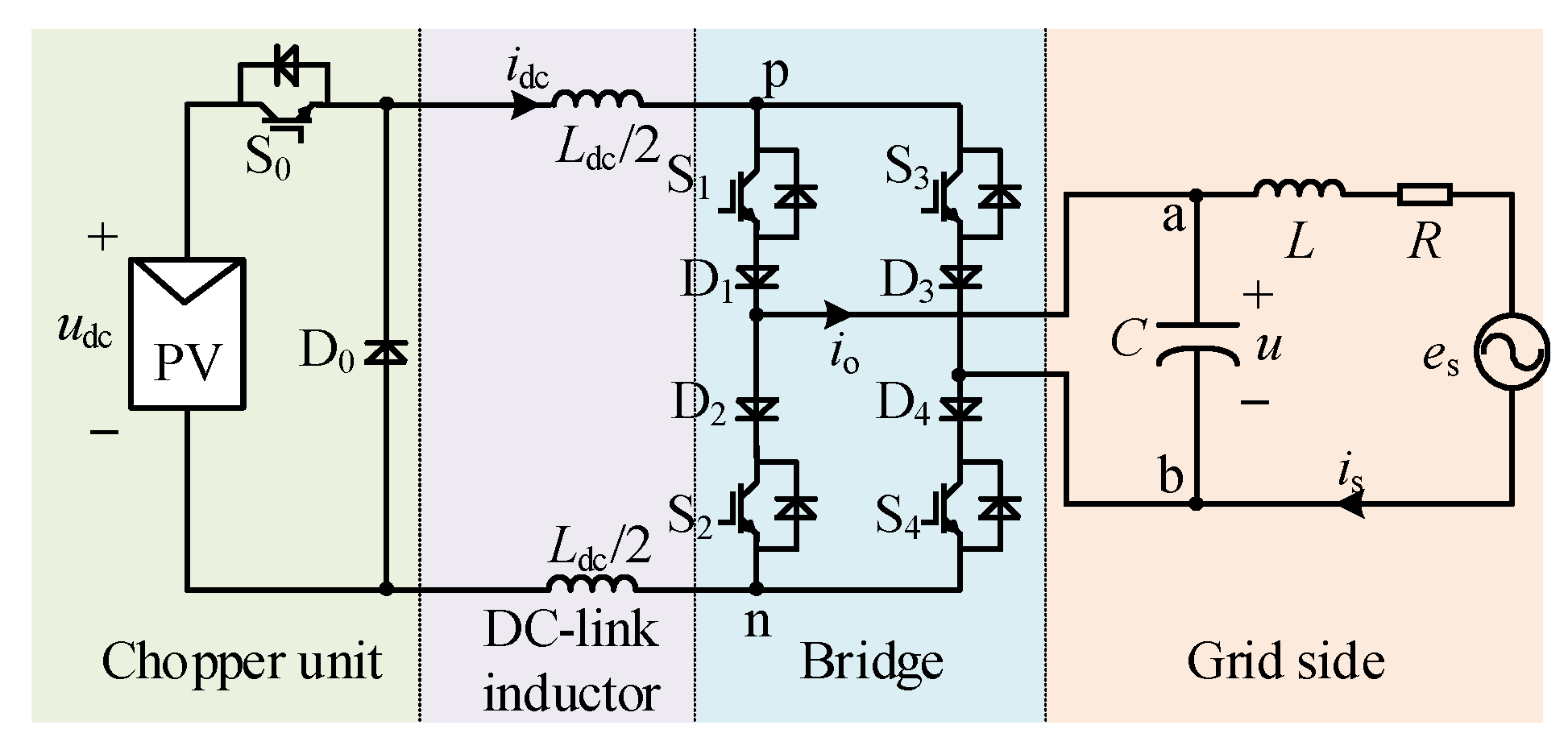
2. Topology and Operation Principle of the Proposed CSI Topology
3. Reference Calculation and Control Scheme for DC-Side Inductor Current
3.1. Reference Calculation for DC-Side Inductor Current
3.2. Hysteresis Loop Control Scheme for DC-Side Inductor Current
4. Modulation Strategy for the CSI
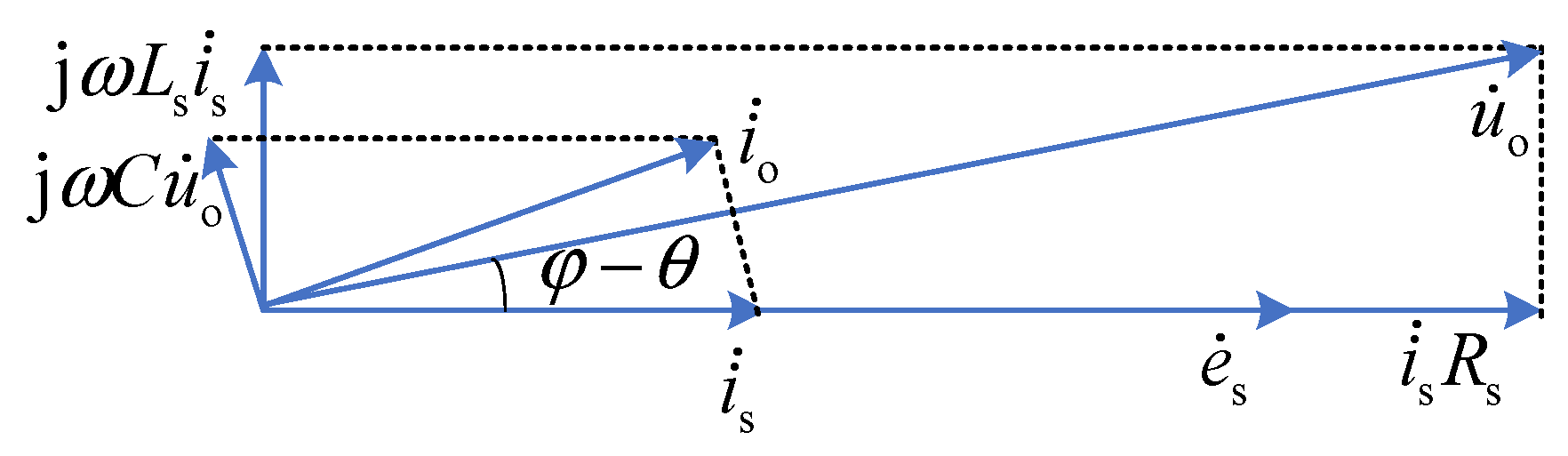
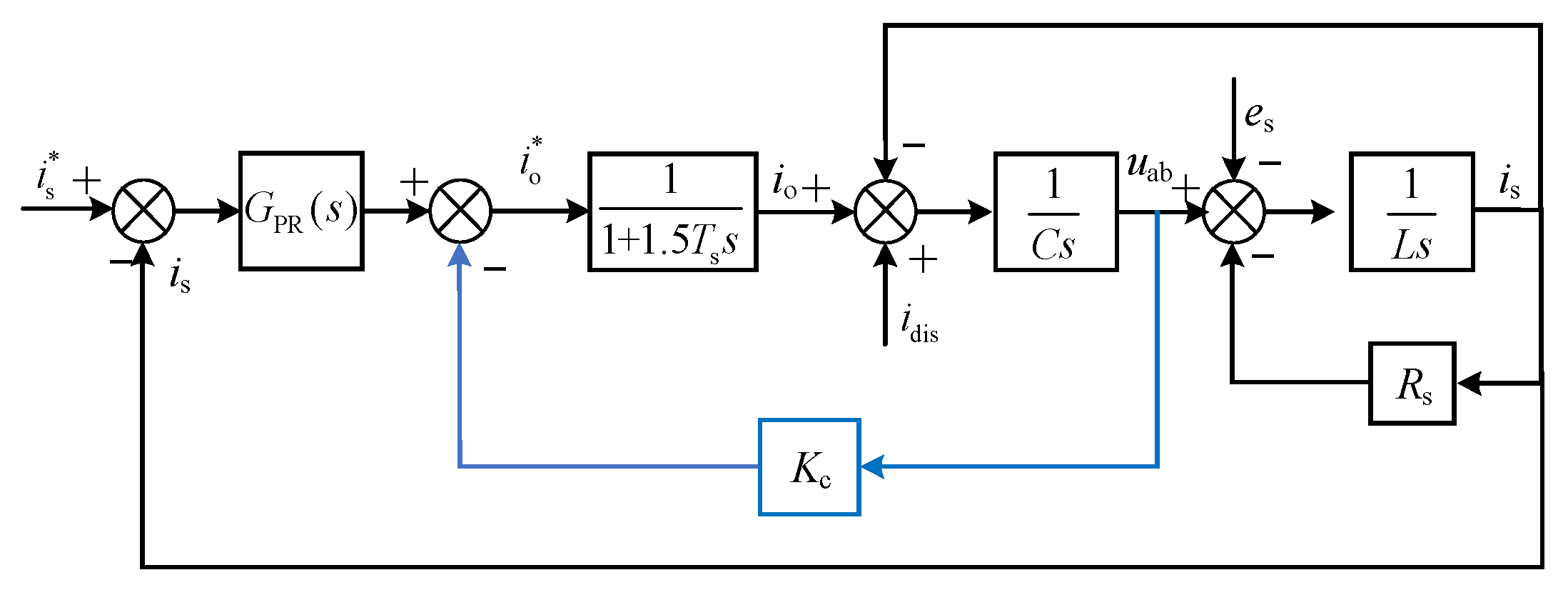
5. Grid Current Control Scheme Based on Capacitor Voltage Feedback
5.1. Active Damping Based on Voltage Feedback
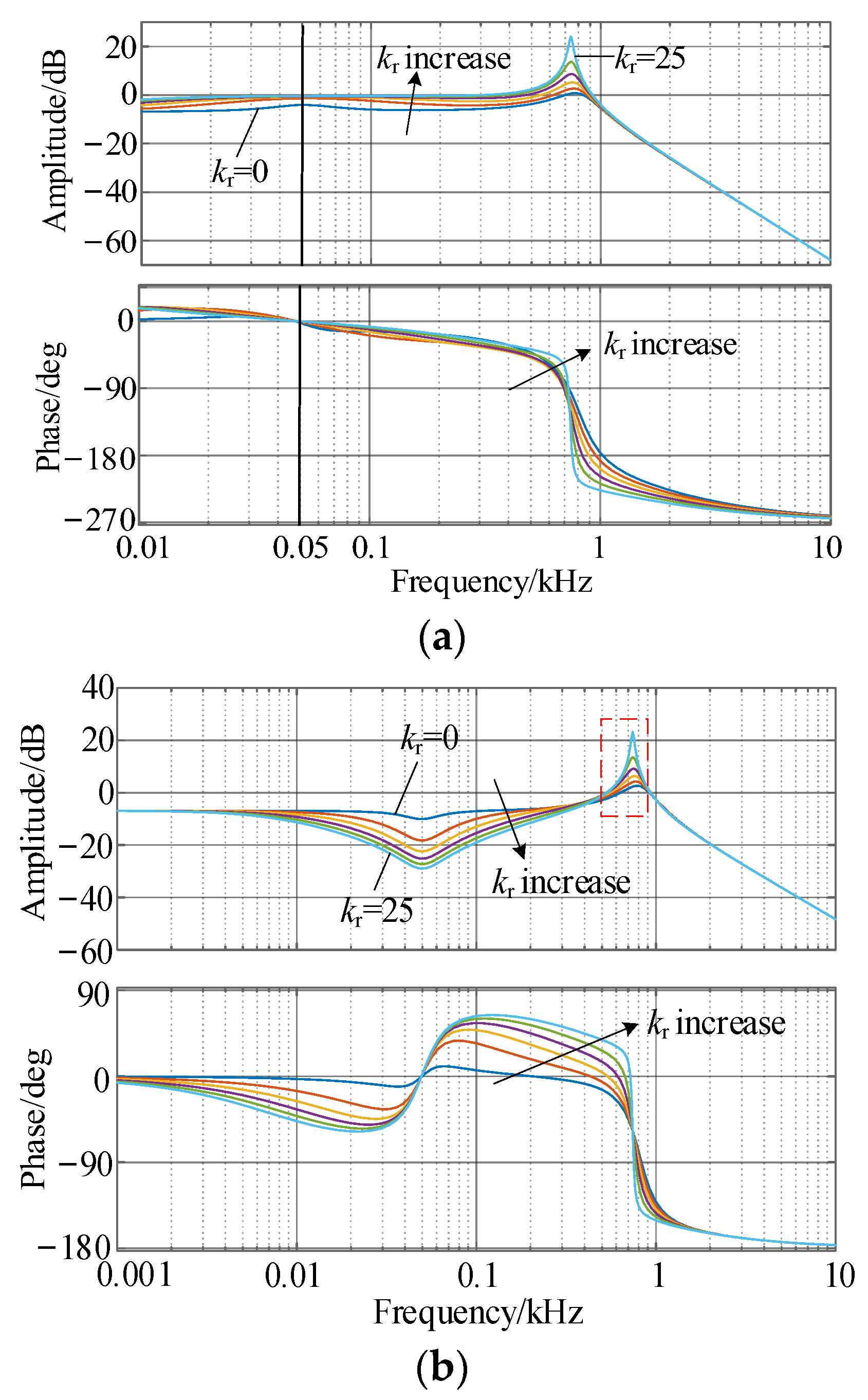
5.2. Controller Parameter Design Method
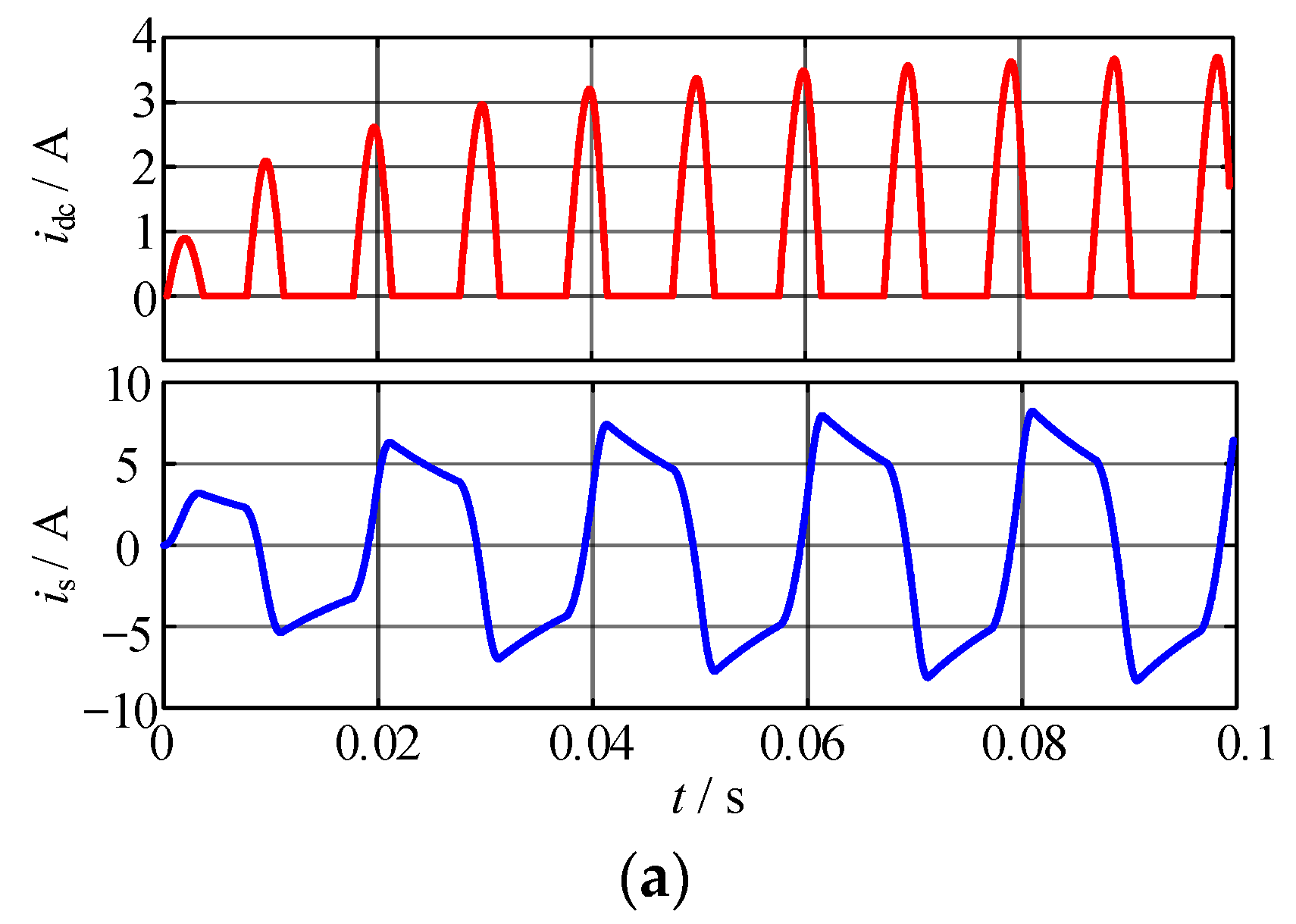
6. Simulink Results and Analysis
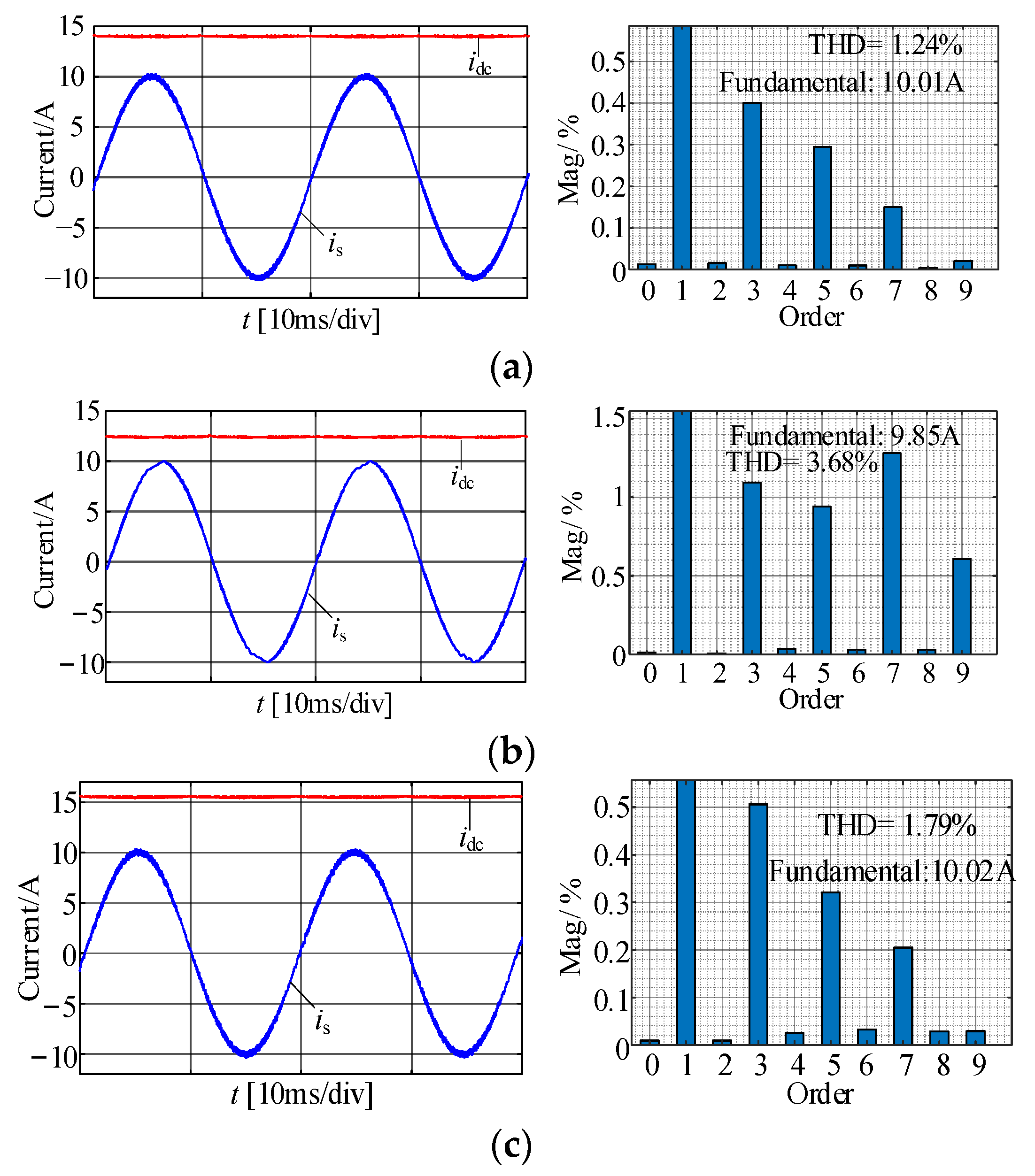
7. Experimental Results and Analysis
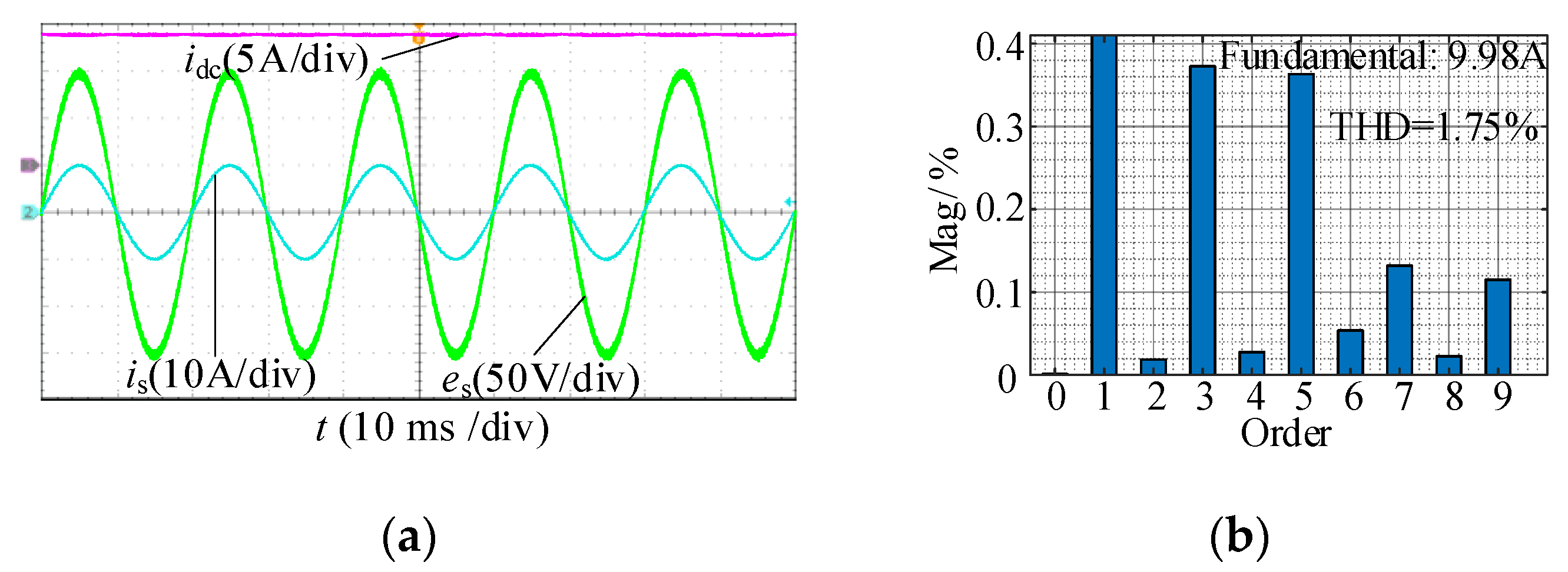
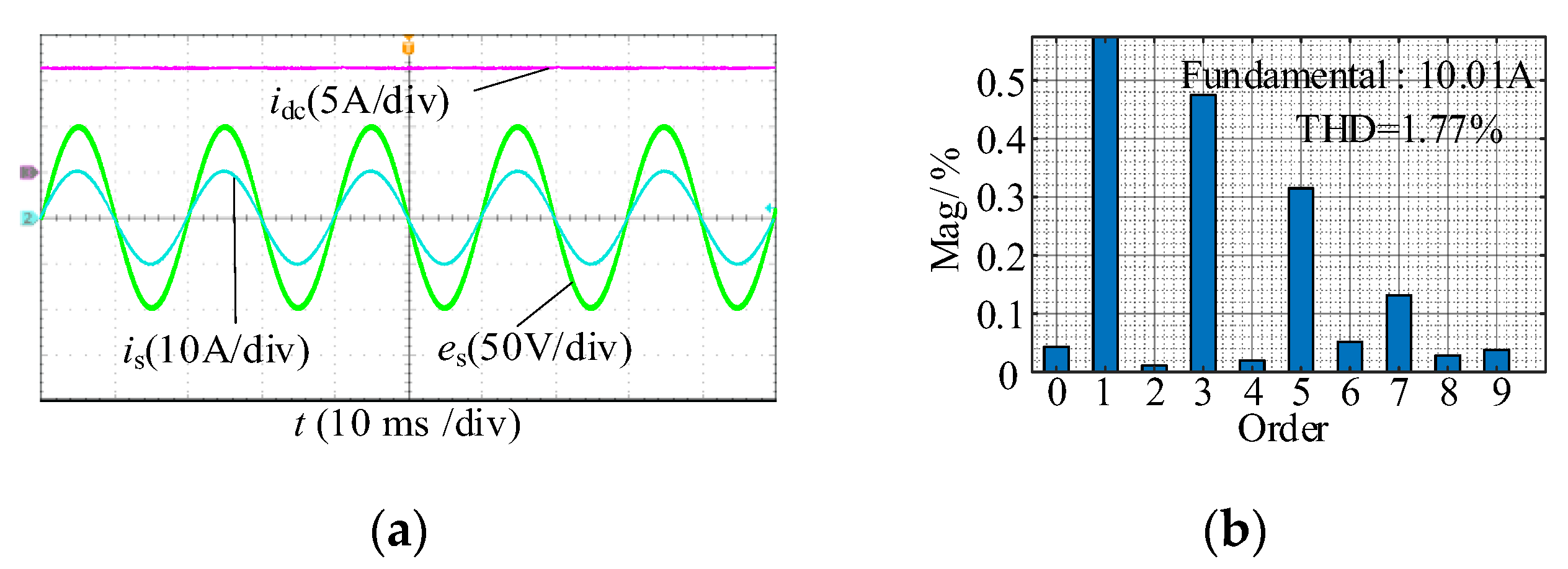
7.1. Steady-State Verification
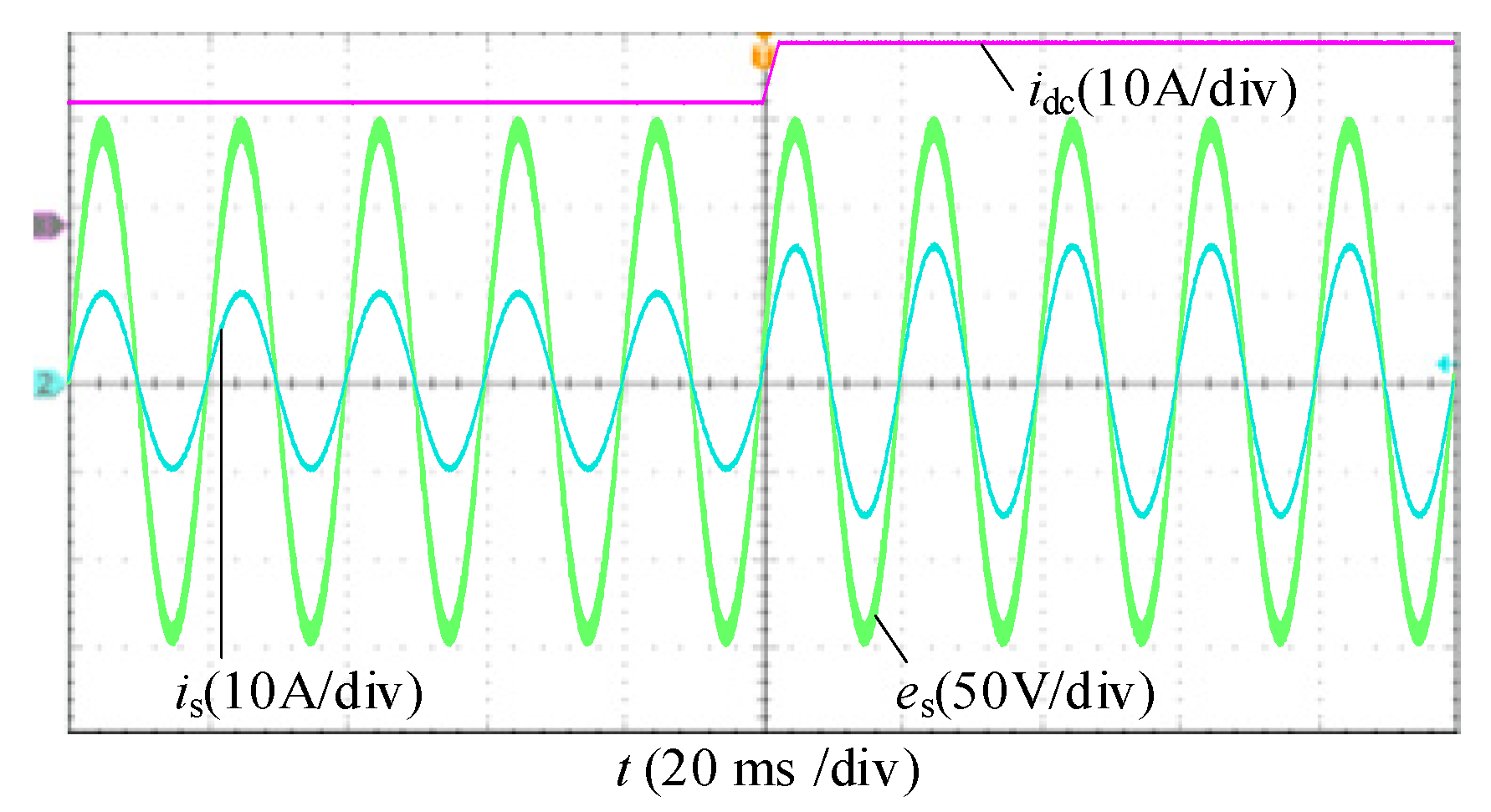
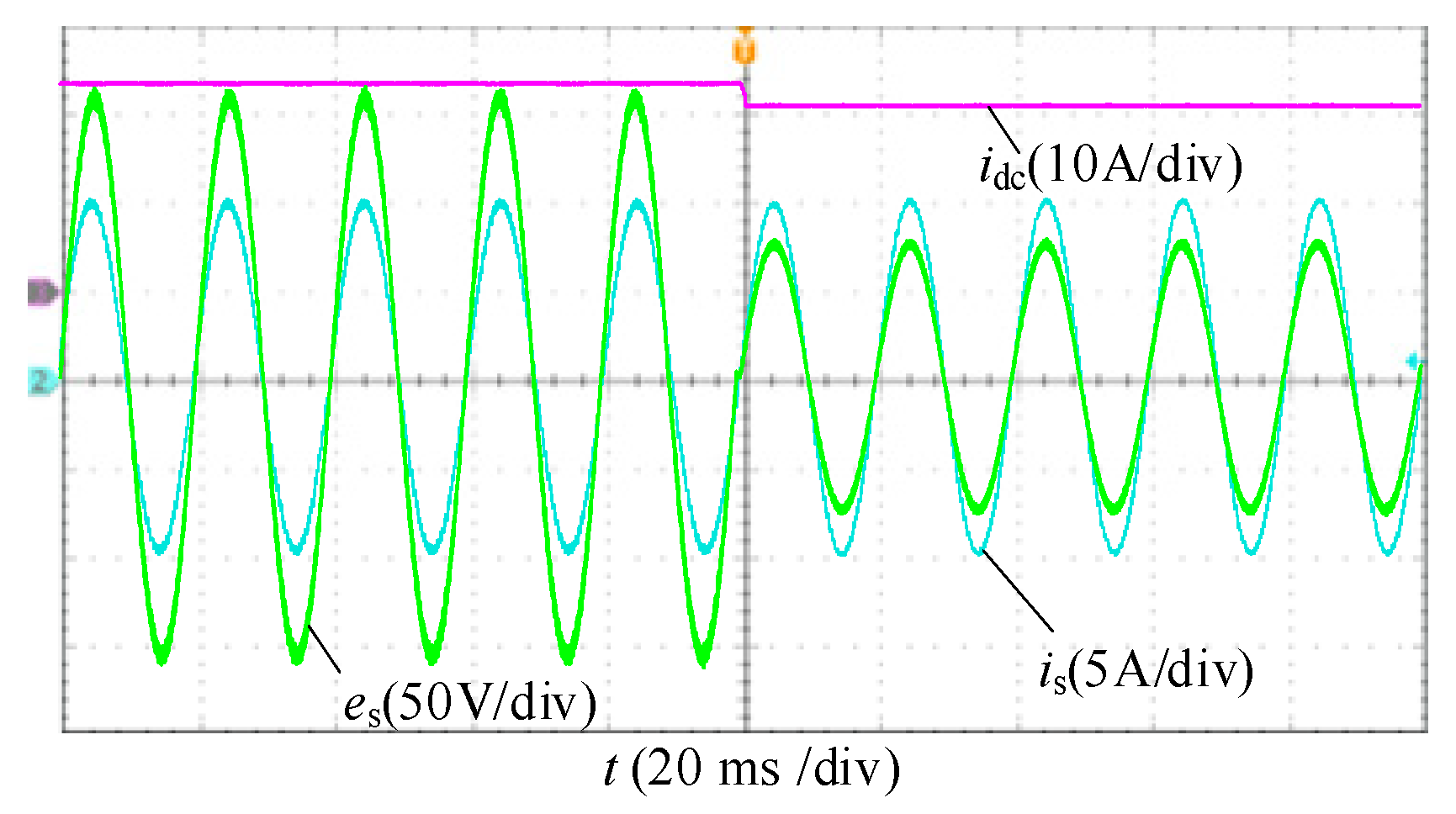
7.2. Dynamic Verification
8. Conclusions
- (1)
- The control method of the DC-side inductor current is proposed in this paper, which can give the DC side the characteristics of the controlled current source. Hence, it can realize the independent control of the DC side and the AC grid side, improving the reliability and practicality of the CSI.
- (2)
- Based on output current polarity, the proposed logic conversion method can convert the PWM signals into switching signals of the single-phase CSI; there is no need to add hardware logic circuits.
- (3)
- The proposed active damping method based on the feedback capacitor voltage can effectively suppress the resonance peak caused by the LC filter on the grid side.
- (4)
- The optimization design of the PR controller is analyzed in this paper. The results show that increasing the resonance coefficient can eliminate the steady-state error, and the suppression ability of the harmonic components can be improved by increasing the proportional coefficient.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mahdavi, M.; Jurado, F.; Schmitt, K.; Chamana, M. Electricity Generation from Cow Manure Compared to Wind and Photovoltaic Electric Power Considering Load Uncertainty and Renewable Generation Variability. IEEE Trans. Ind. Appl. 2024, 60, 3543–3553. [Google Scholar] [CrossRef]
- Xia, B.; Huang, S.; Zhang, J.; Zhang, W.; Liao, W.; Gao, J.; Wu, X. An Improved High-Frequency Voltage Signal Injection-based Sensorless Control of IPMSM Drives with Current Observer. IEEE Trans. Transp. Electrif. 2023, 1. [Google Scholar] [CrossRef]
- Wang, W.; Gao, F.; Yang, Y.; Blaabjerg, F. An Eight-Switch Five-Level Current Source Inverter. IEEE Trans. Power Electron. 2019, 34, 8389–8404. [Google Scholar] [CrossRef]
- Dong, Z.; Wen, H.; Song, Z.; Liu, C. 3-D SVM for Three-Phase Open-End Winding Drives with Common DC Bus. IEEE Trans. Power Electron. 2023, 38, 9340–9346. [Google Scholar] [CrossRef]
- Liu, J.; Yang, M.; Wang, T. Impedance-Based Stability Analysis of Grid-Tied Photovoltaic System with Superconducting Magnetic Energy Storage System. IEEE Trans. Appl. Supercond. 2021, 31, 5402504. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Magnetic Integration of the LCL Filter in Grid-Connected Inverters. IEEE Trans. Power Electron. 2014, 29, 1573–1578. [Google Scholar] [CrossRef]
- Guo, W.; Chen, T.; Huang, A.Q. A Control Bandwidth Optimized Active Damping Scheme for LC and LCL Filter-Based Converters. IEEE Access 2023, 11, 34286–34296. [Google Scholar] [CrossRef]
- Rajeev, M.; Agarwal, V. Single phase current source inverter with multiloop control for transformer less grid–PV interface. IEEE Trans. Ind. Appl. 2018, 54, 2416–2424. [Google Scholar] [CrossRef]
- Guo, X.; Sui, S.; Wang, B.; Zhang, W. A current-based approach for short-circuit fault diagnosis in closed-loop current source inverter. IEEE Trans. Ind. Electron. 2019, 67, 7941–7950. [Google Scholar] [CrossRef]
- Geng, Y.; Yun, Y.; Chen, R.; Wang, K.; Bai, H.; Wu, X. Parameters Design and Optimization for LC-Type Off-Grid Inverters with Inductor-Current Feedback Active Damping. IEEE Trans. Power Electron. 2018, 33, 703–715. [Google Scholar] [CrossRef]
- Migliazza, G.; Buticchi, G.; Carfagna, E.; Lorenzani, E.; Madonna, V.; Giangrande, P.; Galea, M. DC current control for a single-stage current source inverter in motor drive application. IEEE Trans. Power Electron. 2020, 36, 3367–3376. [Google Scholar] [CrossRef]
- Titus, J.; Harikrishnan, P.; Hatua, K. An SCR-Based CSI-Fed Induction Motor Drive for High Power Medium Voltage Applications. IEEE Trans. Ind. Electron. 2021, 68, 4657–4666. [Google Scholar] [CrossRef]
- Yang, S.; Peng, F.Z.; Lei, Q.; Inoshita, R.; Qian, Z. Current-fed quasi-Z-source inverter with voltage Buck–Boost and regeneration capability. IEEE Trans. Ind. Appl. 2010, 47, 882–892. [Google Scholar] [CrossRef]
- Li, Y.W.; Pande, M.; Zargari, N.R.; Wu, B. DC side inductor current minimization for high-power current-source motor drives. IEEE Trans. Power Electron. 2008, 24, 232–240. [Google Scholar]
- Zhang, D.; Wang, P.L.; Wang, L.Q.; Zhu, W.T. Three-phase Sepic-type current source inverter that can suppress common mode current. Acta Energiae Solaris Sin. 2023, 44, 266–273. [Google Scholar]
- Guo, X.; Wang, N.; Zhang, J.; Wang, B.; Nguyen, M.-K. A novel transformerless current source inverter for leakage current reduction. IEEE Access 2019, 7, 50681–50690. [Google Scholar] [CrossRef]
- Wang, W.; Gao, F.; Yang, Y.; Blaabjerg, F. Operation and modulation of H7 current-source inverter with hybrid SiC and Si semiconductor switches. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 387–399. [Google Scholar] [CrossRef]
- Miao, Y.; Liao, W.; Huang, S.; Liu, P.; Wu, X.; Song, P.; Li, G. DC side inductor Current Minimization Scheme for IM Drive System Fed by Bidirectional DC Chopper-Based CSI. IEEE Trans. Transp. Electrif. 2023, 9, 2839–2850. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, T.; Miao, Y.R. Research on the Modulation and Control Strategy for a Novel Single-Phase Current Source Inverter. Energies 2023, 16, 6729. [Google Scholar] [CrossRef]
- Kiran, V.; Rajeevan, P.P. A New Carrier Based Modulation Technique for Current Source Inverters. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020. [Google Scholar]
- Song, P.Y.; Liu, Y.H.; Liu, C. Research on Parameter Design and Control Method for Current Source Inverter–Fed IM Drive Systems. Machines 2022, 10, 922. [Google Scholar] [CrossRef]
- Guo, Q.; Zhou, C.L.; Li, S. A Multiple Loops Control Strategy Based on DC Link Voltage of Current Source PWM Rectifiers. Trans. China Electrotech. Soc. 2022, 37, 2051–2063. [Google Scholar]
- Xia, B.; Huang, S.; Zhang, J.; Zhang, W.; Liao, W.; Huang, X.; Huang, S. Encoderless Deadbeat Predictive Current Control for SPMSM Drives with Online Parameter Identification. IEEE Trans. Transp. Electrif. 2024, 1. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| DC input voltage udc (V) | 270 |
| DC-side inductance Ldc (mH) | 4 |
| Amplitude of grid voltage es (V) | 311 |
| Filter capacitance C (µF) | 12 |
| Inductance L (mH) | 0.5 |
| Resistance R (Ω) | 0.5 |
| Frequency f (kHz) | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, T.; Gao, J.; Liu, H.; Xia, B. Research on the Control and Modulation Scheme for a Novel Five-Switch Current Source Inverter. Energies 2024, 17, 3640. https://doi.org/10.3390/en17153640
Fu T, Gao J, Liu H, Xia B. Research on the Control and Modulation Scheme for a Novel Five-Switch Current Source Inverter. Energies. 2024; 17(15):3640. https://doi.org/10.3390/en17153640
Chicago/Turabian StyleFu, Tao, Jihao Gao, Haiyan Liu, and Bo Xia. 2024. "Research on the Control and Modulation Scheme for a Novel Five-Switch Current Source Inverter" Energies 17, no. 15: 3640. https://doi.org/10.3390/en17153640
APA StyleFu, T., Gao, J., Liu, H., & Xia, B. (2024). Research on the Control and Modulation Scheme for a Novel Five-Switch Current Source Inverter. Energies, 17(15), 3640. https://doi.org/10.3390/en17153640