1. Introduction
Wave energy is an important form of marine renewable energy, which has numerous advantages including safety, cleanliness, high energy density, and accessibility [
1]. According to statistics, the current economic value of global wave energy utilization is between 100 million and 1 billion watts, while China’s theoretical reserves of wave energy are about 70 million kilowatts, which has great commercial prospects and strategic value [
2].
As shown in
Figure 1, wave energy convertors (WECs) can be classified into oscillating water column type, wave crossing type, and oscillation type according to the different forms of wave energy [
2]. Among them exist the most common types of oscillating wave energy devices [
3], such as point-absorption type (also known as oscillating float type), pendulum type, raft type, nodding duck type, etc. [
4]. The point-absorption type has been widely used due to its early development and mature technology [
5].
The power take-off system (PTO), shown in the yellow dotted box in
Figure 1, is the key component that determines the performance level of the wave energy device [
6], which can usually be divided into mechanical, hydraulic, magnetic, etc. [
7], including air turbines, hydraulic turbines, hydraulic systems, mechanical transmission systems, etc. These systems efficiently harness aerodynamic energy, hydrokinetic energy, hydraulic energy, mechanical energy, etc., and transform them into energy forms compatible with power-generation systems. Ultimately, mechanical energy is converted into electrical energy through linear motors, magnetic fluid motors, and similar mechanisms [
8]. Among the above three forms of PTO, hydraulic PTO has the characteristics of stable transmission, convenient and reliable speed adjustment, and relatively large power density, so it is widely used in wave energy power generation devices.
In the actual operation process of the wave energy conversion device, the influence of unstable sea conditions, bad weather, and other factors often extends the rated cycle of the hydraulic cylinder. The rated speed of the generator or the rated torque of the output shaft decreases, so that the final conversion efficiency of the device decreases. Consequently, the hydraulic PTO has to be actively controlled to offset the negative impact of the environment on the device and ensure that the device can operate efficiently and in a stable manner under different wave conditions [
9]. The most commonly used control method is PID control, that is, through the combination of three basic control functions, proportional, integral, and derivative, to achieve accurate control of each part of the hydraulic PTO [
10]. Umesh A. Koredel et al. completed the speed control of hydraulic PTO of the linear generator by PID control [
11]; Marian P. Kazmierkowski et al. performed PID control for voltage at the load side and achieved good results [
12].
Additionally, the PID control method can also predict the movement law of the wave energy device with the wave according to the information collected by the system. This approach enhances both the generated power and efficiency of the system. Daniele Cavaglieri developed the Kalman prediction algorithm based on the PID control method, which used Doppler radar to collect and predict wave data in the nearby sea area, and adjusted the parameters of the hydraulic PTO based on this to ensure that the power generation efficiency of the device was maintained at about 21.75% [
13]. Rajapakse, G [
14] carried out a model predictive control study on the PTO of an oscillating water column gas turbine, where the generator speed was controlled by optimizing the permanent magnet synchronous generator and the IGBT rectifier module, which effectively improved the system power. Falco [
15] controlled the frequency response of the point-absorbing wave energy conversion device based on PID feedback control, which captured the resonance of the system and further improved the power generation. In addition, Amon [
16] established an MPPT control algorithm for linear generators based on the PID control theory and completed the experimental test. Based on the developed MPPT method, Boyin [
17] simulated the generator damping using the fixed-step climbing method, which provided further theoretical support for the performance optimization of the hydraulic PTO.
In summary, optimization of the system performance of the WEC mainly depends on the control of its hydraulic PTO. PID control has been widely used in the industrial field because of its adaptability, robustness and scalability. It has become the preferred control method of the mainstream wave energy conversion device, offering significant benefits in enhancing the energy conversion efficiency of the device. However, at present, the research on the effect of the PID control method on the control of hydraulic PTO performance is still limited to the experimental stage, and there is not an accurate and concise numerical model to simulate the operation of the system under this control method.
Based on the background of this problem, this paper takes the point-absorbing wave energy conversion device as the research object and proposes a new feasible numerical evaluation method. By innovatively using the MATLAB Simulink® wave energy conversion device open-source program WEC-Sim, developed by the U.S. Renewable Energy Laboratory (NREL), the numerical simulation model of the starting point-absorbing wave energy device is constructed in the way of secondary development, and the correctness and credibility of the model are verified. The key parameters of the hydraulic PTO are controlled by using the PID control module, and output results of this type of device are obtained at different conditions. The PID control module is then used to control the key parameters of the hydraulic PTO, and the output results, such as the power conversion efficiency, of this kind of device under different working conditions and design parameters are obtained. This provides data support for the improvement of the subsequent device design, thus filling the technological gaps in the related fields.
2. Physical Model and Motion Equations
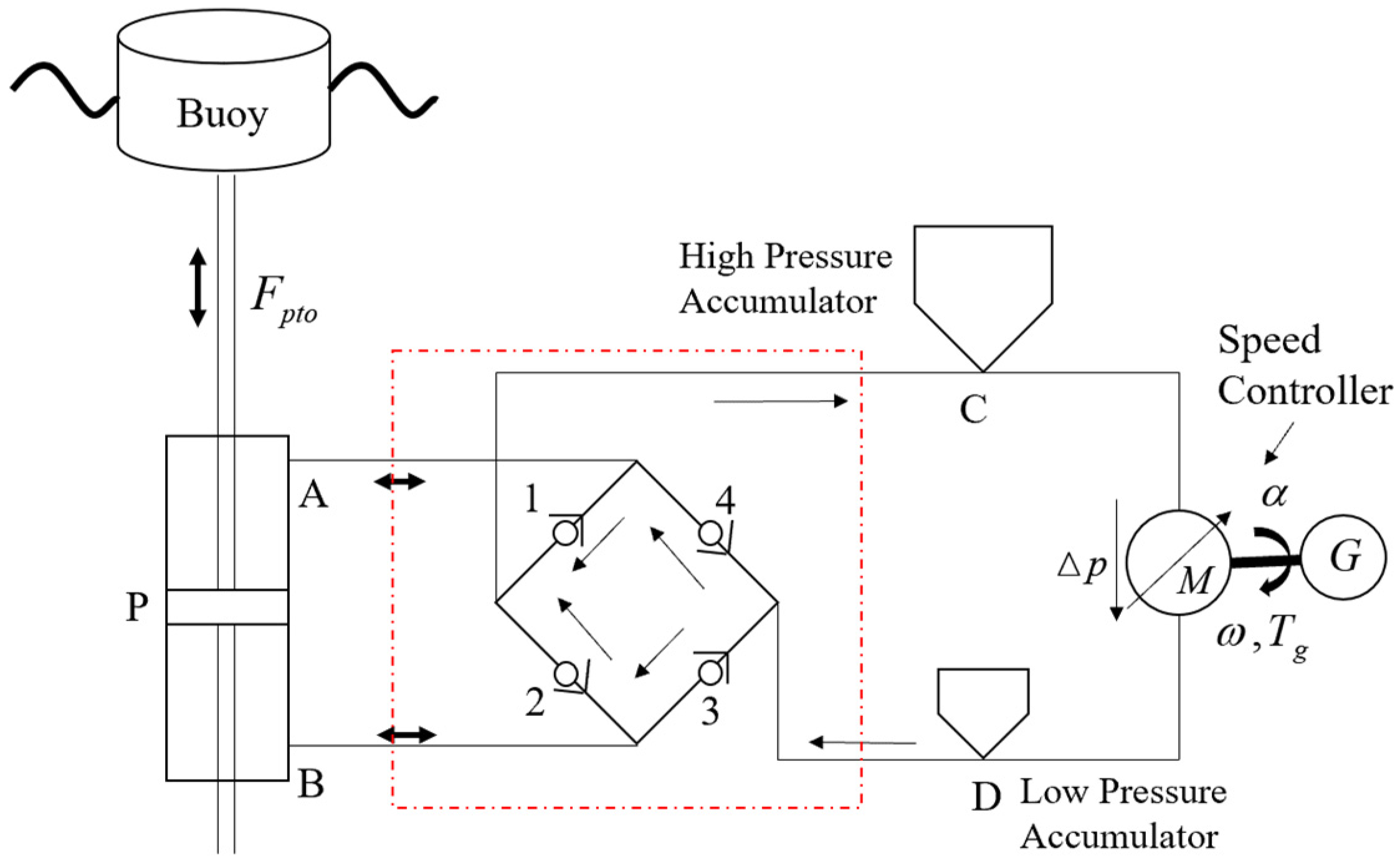
The point-absorption wave energy power generation device is composed of a float, connecting mechanism, support column, hydraulic PTO, and other parts. The float is the main energy-gaining part of the device. Through its vertical motion, it can convert the wave energy to mechanical energy, and finally convert it into electrical energy through the subsequent hydraulic PTO action. In addition, the hydraulic PTO is the core part of the whole set of equipment that realizes the conversion of mechanical energy to electric energy, which is composed of a hydraulic cylinder, rectifier circuit, pressurization device, speed control module, alternator, and other parts. The precursor mainly uses hydraulic energy to achieve energy transfer, and finally uses the alternator to realize the conversion of mechanical energy into electrical energy. The float motion of the buoyancy absorbs the energy in the wave through a heave motion which can be expressed by the following equation:
represents the sum of the mass of the float during motion and the additional mass of the heave, is the additional damping of the heave and the damping of the heaving direction of the PTO system, is the recovery stiffness coefficient of the heave direction resulting from buoyancy, and is the first-order excitation wave force in heave.
To facilitate the analysis, the displacement
is transformed in the complex frequency domain
, and the expression in the complex frequency domain is further derived
When the incident wave is a unit amplitude, the amplitude of the displacement
is called the amplitude response operator, which can be written as
Then, the general frequency domain governing equation of the hydraulic PTO connected to the float is as follows:
Among them, is the wave excitation force after the Fourier transform, , is the velocity after the Fourier transform, is the dry weight of the wave energy device, is the additional mass of the device, is the linearized elastic force coefficient, and is the PTO damping force of the device.
The excitation force
and the PTO force
can be regarded as external forces, while other forces can be regarded as internal forces. The internal forces can be expressed by the intrinsic impedance and velocity of the wave energy device. Thus, the above equation can be simplified as follows:
is the intrinsic impedance of the wave energy device, i.e.,
is the excitation coefficient. It defines the transfer function between the wave elevation and the excitation force:
is the wave lift function after the Fourier transform
. Due to the symmetry in the direction of the device of the vertical axis,
can be written as:
where
is the group velocity,
which is the number of waves, and
w is the depth of the seawater.
The force on a hydraulic PTO system depends on the load impedance and the incoming flow velocity:
is the load impedance of the system. The hydraulic PTO impedance, for the system to achieve optimal energy capture at a given wave frequency, is the conjugate complex impedance of the intrinsic impedance at this frequency:
The intrinsic impedance of a PTO system is the internal property of the system itself when the influence of external forces (excitation force and hydraulic force) on the system is not considered, namely:
Theoretically, PTO damping forces can be abstracted into mass-damping-spring systems with frequency-dependent PTO coefficients:
3. Parameters of PTO Systems
The hydraulic PTO system’s average absorbed power serves as a key metric for the system performance. In practice, the discrete Fourier transform (DFT) of velocity data is employed to ascertain this average output power. Plancherel theorem [
18,
19], which is derived from the DFT, facilitates the representation of power absorbed by the linear hydraulic PTO system. This is particularly pertinent when the wave energy transfer is formulated as a function of wave characteristics. By leveraging these analytical tools, a precise evaluation of the system’s energy conversion efficiency can be achieved, providing a robust framework for performance analysis in the context of wave energy utilization. The energy calculation formula for hydraulic PTO systems can be simplified. The average power input from outside to the hydraulic PTO over a time interval containing N samples is the average of the instantaneous power of each sample:
The hydraulic circuit causes the damping force and velocity to change periodically, and the power absorbed by the WEC can be expressed as follows:
When the PTO force is a linear function of velocity in (9), the above equation can be simplified as follows:
Combining (4) and (7), the velocity
can be defined as follows:
represents the inverse matrix of the scalar quantity sought. The average absorbed power of the generalized wave energy utilization device is obtained:
For point-absorbing wave energy devices, the main one is the heave motion, and the diffraction behavior is not considered. Substituting (17) in (8), the average absorbed power can be written as:
The unit wavefront power of a wave with a frequency of
is defined as follows:
where
is the wave height, and the wave group velocity
can be defined as follows:
is a function of wave frequency and water depth:
In deep-water conditions (
),
tends to be fixed, and the group velocity
is independent of depth:
In summary, the unit wavefront power at the small amplitude scale is as follows:
The capture width is a measure of the performance of a wave energy generator and is defined as the ratio of the wave energy captured by the float to the energy transmitted by the wave:
For short-period waves, the wave energy transmission is linear with the wave spectrum, assuming that the float heave velocity is linear and periodic relative to the wave height, the capture width can be written as follows:
There is a special case, under deep-water conditions, where the WEC geometrically moves symmetrically and in the direction of only one degree of freedom of draping, in which case the wave capture width becomes the following:
Let the final output electrical power be and
the diameter of the wave energy float is
; then, the energy conversion rate of the device is as follows:
5. Results and Discussion
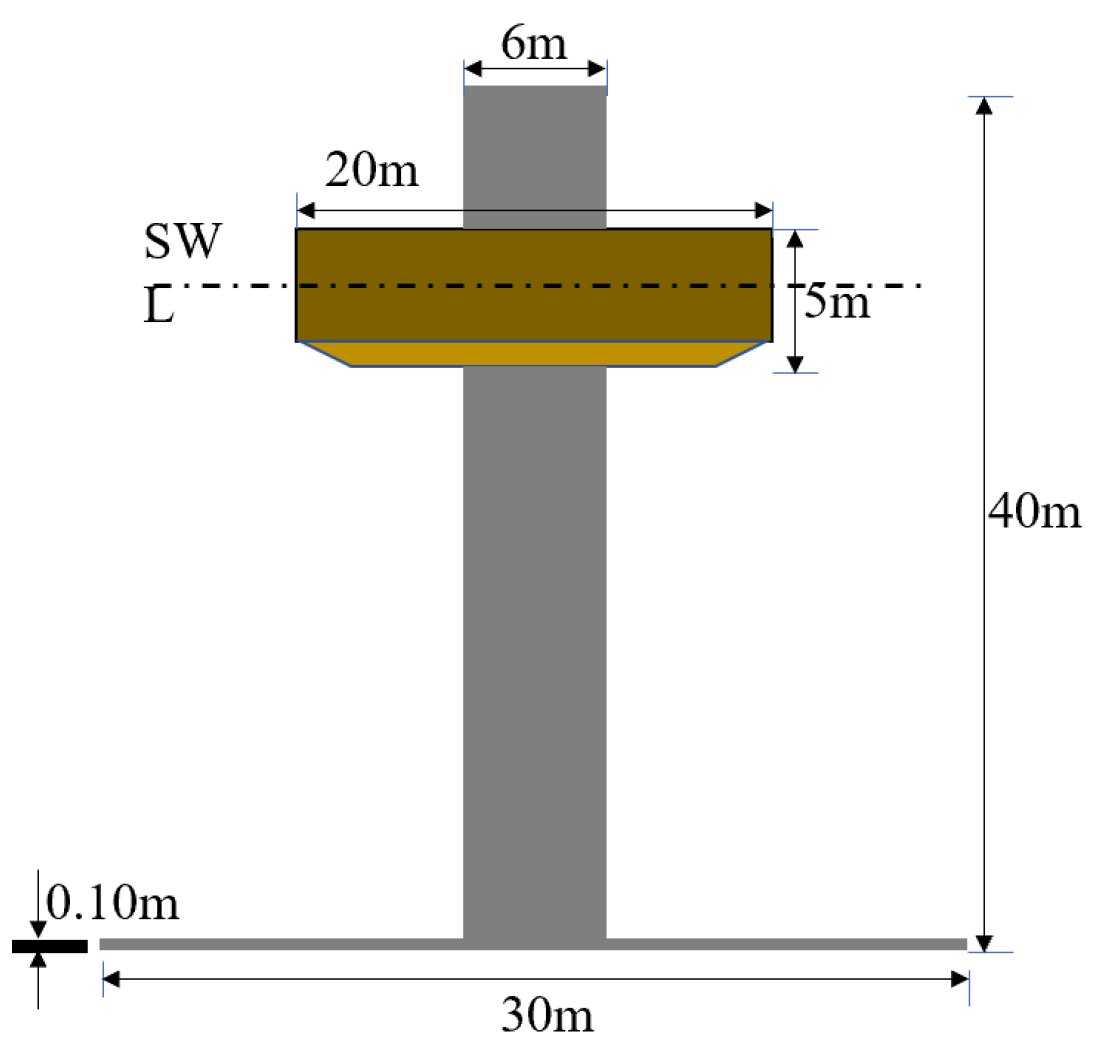
The numerical simulation method proposed in this paper can define the specific parameters affecting the elasticity and damping coefficient of the system through the preprocessing file, which is more accurate than the traditional “one-time definition method” and facilitates the study of specific parameters affecting the performance of hydraulic PTO. Based on this method, the authors studied the output performance of the classical oscillating float-type wave energy device under regular and irregular waves, and the influence of some hydraulic parameters on the system, such as the design dimensions of the device, are given in
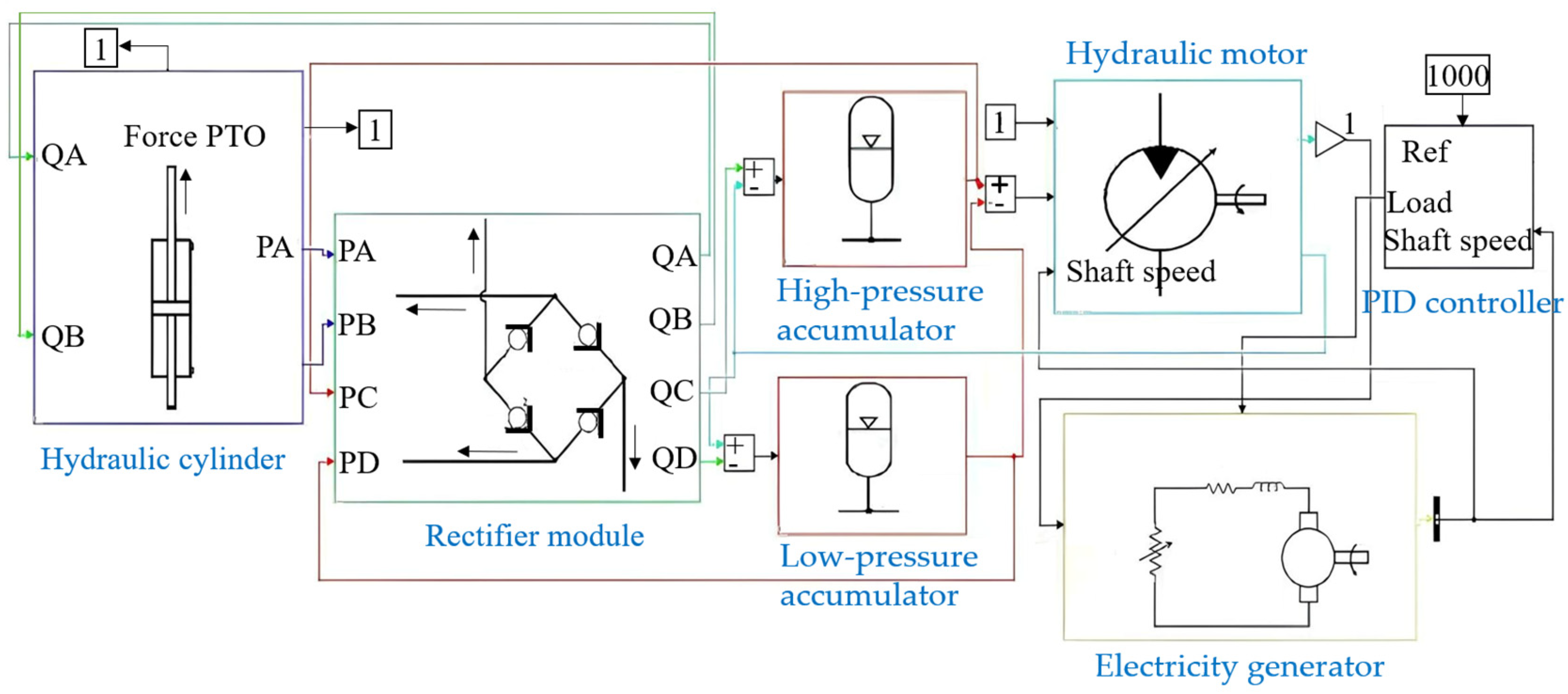
Figure 8. The corresponding Simulink model is built by imitating
Figure 5, and the working conditions such as wave height, period, irregular wave spectrum, and peak period are set in the preprocessing file to initialize the hydraulic PTO parameters.
Firstly, the variation in internal parameters during the operation of the hydraulic PTO is considered under a regular wave with a period of
and a wave height of
. Since the variation in the circuit pressure will directly affect the operation of the generator,
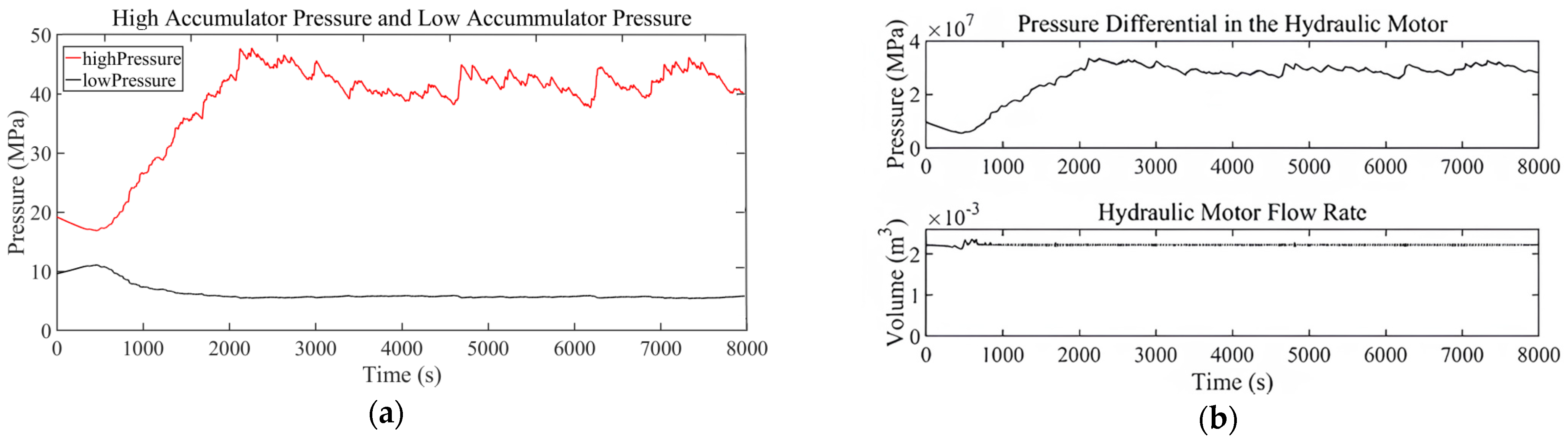
Figure 9 gives the simulation results of the pressure variation at both ends of the accumulator and hydraulic motor in the hydraulic circuit. In
Figure 9, after a short period of time, the pressure difference between the output of the high- and low-pressure accumulators is finally stabilized at about 45 MPa; at the same time, as shown in
Figure 9b, the pressure difference at the hydraulic motor starts to rise slowly from the initial stage and can be finally stabilized at 45 MPa, which indicates that the maximum pressure that can be provided by the hydraulic circuit at this time is 45 MPa.
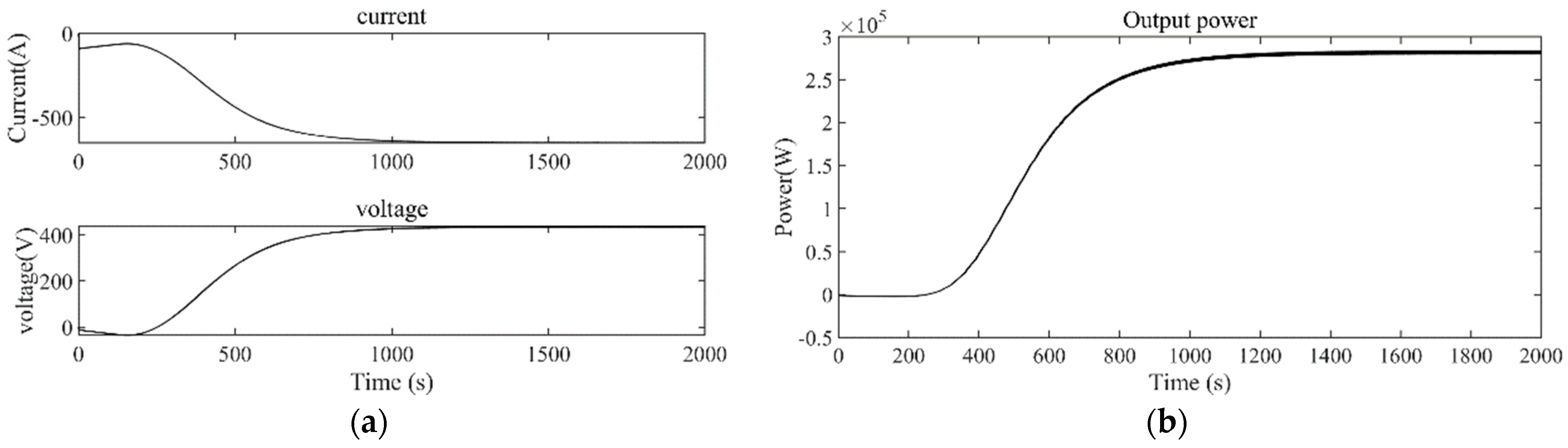
Figure 10 shows the voltage, current, and power generated by the generator circuit. As shown in
Figure 10a, after the system is stabilized, the directions of the voltage and current are opposite, the generator is in the power generation stage, and the current generated can reach 700 A when stable at the corresponding voltage of 405 V. In
Figure 10b, the generator can output up to 2.75 × 10
5 W of power during this time.
Furthermore, the wave energy capture width and energy gain efficiency at wave heights of 3 m and 2.5 m were studied. As shown in
Table 2, when the regular wave height is 3 m, the energy gain efficiency is 10.32%, which is close to the current theoretical energy gain efficiency of this type of device; when the wave height drops to 2.5 m, the energy gain efficiency drops to 7.40%.
In addition, this article considers the case of irregular waves. The JONSWAP wave spectrum was selected, taking the spectral peak period and the significant wave height . Simulation calculations are also carried out for the changes in physical quantities of each component of the hydraulic PTO during the operation of the wave energy device to derive the energy output for the corresponding case.
As shown in
Figure 11, the liquid pressure at the high-pressure accumulator always fluctuates up and down around a certain value under irregular wave action compared to that under regular wave action, while the liquid pressure at the low-pressure accumulator is more stable. The steady state pressure difference is Δ
p = 27.98 Mpa, and the hydraulic energy obtained by the hydraulic motor is therefore reduced as a result.
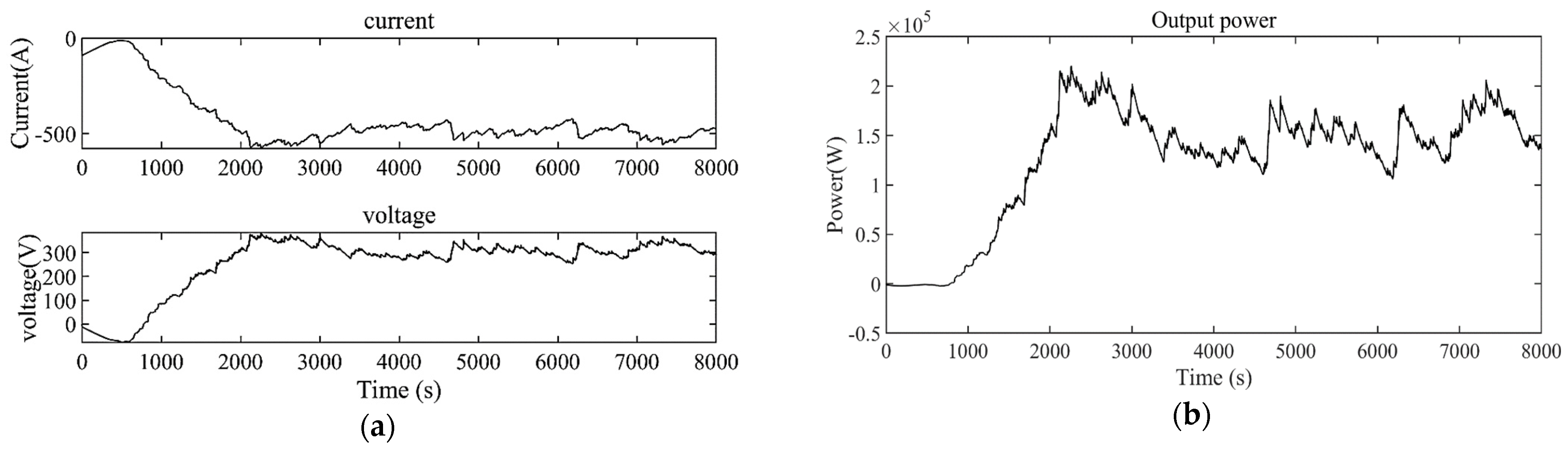
Figure 12 shows the voltage, current, and output power under the corresponding operating conditions. Comparing
Figure 11 and
Figure 12, it can be seen that under the same working conditions, the output current under irregular waves is I = 500 A, the output voltage is V = 305 V, and the average output power is 1.725 × 10
5 W.
At the same time, the energy efficiency of PTO under irregular waves was evaluated, and the predictions are shown in
Table 3. When the peak period is fixed, the energy efficiency and sense wave height of the device decrease. Compared with the regular wave, when the device works under irregular wave conditions, the energy efficiency is significantly reduced, down to 15.97% with the wave energy capture width being 42.8 kW/m. Due to the decrease in the wave energy capture width of the float under irregular waves, the mechanical energy conversion ability of the hydraulic PTO decreases, and the energy gain efficiency of the device decreases.
6. Conclusions
In this paper, a hydraulic PTO performance evaluation method based on the open-source code WEC-Sim is proposed, which can more intuitively and accurately simulate the output performance of hydraulic PTOs under various working conditions compared with the traditional numerical methods. The following is a summary of the work undertaken and main conclusions:
1. The working principle of the point-absorption wave energy power generation device is explained, and the kinetic equation and the energy conversion model of the internal hydraulic PTO are presented.
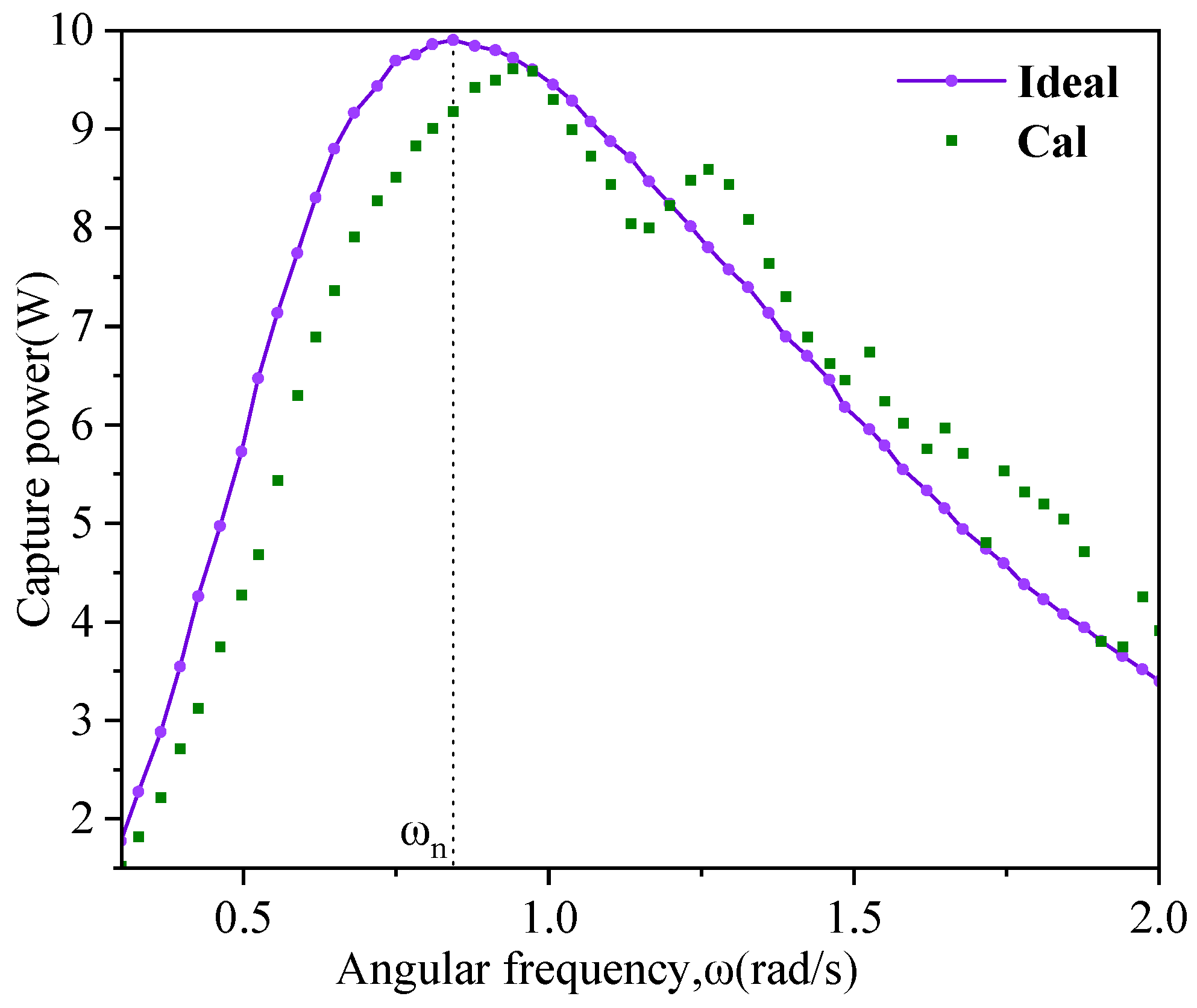
2. The numerical model WEC-Sim simulated the hydraulic performance of the PTO. The reliability of the calculation method was verified by calculating the energy harvesting width of the spherical float under monochromatic wave, and the results were compared with the calculation data of the DEXA 302 device. The power generation efficiency of the device was comprehensively analyzed, and it was found that, compared with the traditional PTO performance evaluation method, the method had the advantages of accuracy, high visualization degree, and simple operation.
3. The proposed numerical method predicts that for a point-absorbing wave energy power generation device that can be integrated into an offshore wind turbine platform, an energy harvesting efficiency of 15.97% can be achieved under regular wave conditions, while this decreases to 10.32% for irregular waves. The simulation data can reliably set the parameters of various parts of the hydraulic PTO, the liquid pressure of the high-pressure (low-pressure) accumulator of the process volume, the hydraulic distribution of the hydraulic motor, and the voltage and current at the generator were also evaluated, which provided data support for the next optimization work.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}